地面小型无人侦察平台发展及关键技术探讨
2019-12-13侯军占张卫国张夏疆徐晓枫黄维东
侯军占,张卫国,庞 澜,杨 光,张夏疆,徐晓枫,黄维东
(西安应用光学研究所,陕西 西安 710065)
引言
随着科技的发展,无人平台在军事作战、反恐维稳、抢险救灾等领域得到广泛的应用,并呈现出其独特的优势。究其原因是无人平台可替代作战人员完成特殊作战任务,还可有效降低人员伤亡。其中,小型无人机和小型无人车作为一种便携的侦察手段将起到重要的作用。但对于某些工作场合,无人车执行的能力是无人机所不具备的,尤其是受限制的空间和环境,无人机难以近距离观察或接近目标,这时地面无人车具有的便携性、隐蔽性、灵活性得到充分体现。如城市作战时,无人车可破窗而入进行侦察和作战,车底危险物检测时,无人车采用麦克纳姆轮可轻松通过车底,坑道和受损建筑内部环境,无人车可进行搜救工作;丛林环境下,单兵携带无人车可进行前突和排爆,无人车安装炸药或者武器还可对目标进行毁伤。鉴于以上优点,国外在地面小型无人车领域很早就开展了研究工作。
近几年,国外在地面小型无人平台领域取得了显著的成果,在军民领域已有大量的应用。已具备了半自主行进能力,能够完成环境观察、地图测绘、人员侦察、危险品拆除等工作,并且小型无人车携带枪械武器后还能对敌先行攻击。鉴于此,小型无人车在国内也越来越受到关注,相关企业院所正在开展无人车技术的研究和相关产品的研制工作。本文分析了国内外小型无人车的研究现状及应用情况,探讨了其功能特点,提出了小型无人车今后的发展趋势及需解决的关键技术。
1 国内外研究现状
1.1 国外研究现状
美国、以色列、法国和瑞士等国家一直在致力于地面小型无人车的研发,并取得了显著的成果,尤其是美国在地面小型无人车领域处于世界前沿。如美国iRobot公司研制了 PACKBOT无人车[1-2],配置有4个摄像头,并且在机械手臂上还安装有摄像头,如图1 所示。其在搜索坑道、建筑物、以及探测和清除地雷的行动中发挥了重要的作用,并能够在水深3 m的环境下工作,已参加了美军在阿富汗和伊拉克的作战行动。

图1 iRobot公司研制的小型无人车Fig.1 Small UGV developed by iRobot company
美国海军陆战队作战实验室与卡内基梅隆大学联合研制了Dragon Runner(龙行者)无人车[3-4],其为一种四轮全驱的可抗高速冲击的无人车,配置有4个摄像头,适合在城市作战环境中执行侦察任务,已在伊拉克战争中使用。龙行者重量仅为4.99 kg,能抵抗从3层楼高跌落的冲击,上下楼梯,越障。可在疾驰模式、警戒模式和监视模式3种模式下执行侦察任务。疾驰模式下可持续将图像回传操控人员;警戒模式下保持静止不动,使用麦克风和能侦测动静的传感器,如发现异常状况,可给操控人员发出警报;监视模式下保持静止不动,将视频持续传回操控人员。
美国iRobot公司和SSC无人系统分公司开展了适合城市作战的一系列袖珍投掷式无人车(ThrowBot)的研究与测试工作,包括六轮砖形、四轮砖形和有鳍反弹等多种无人车[5-6],如图2 所示。有鳍反弹无人车有较好的越障能力,方便安装摄像头,适合在非结构化地形下的行进和侦察。

图2 ThrowBot小型无人车Fig.2 ThrowBot small UGV
以色列ODF光电公司研发了一款可全天候工作的多功能侦察无人车Eye Drive[7-9],如图3 所示,质量为3.5 kg,具有360°全向视觉和声音感知。可通过窗户或越墙部署,运动速度7 km/h,无线通信距离达300 m,工作时间为3 h。无人车倒置时,摄像头可自动调整,显示正确的图像,适合于建筑物内部环境的侦察感知。
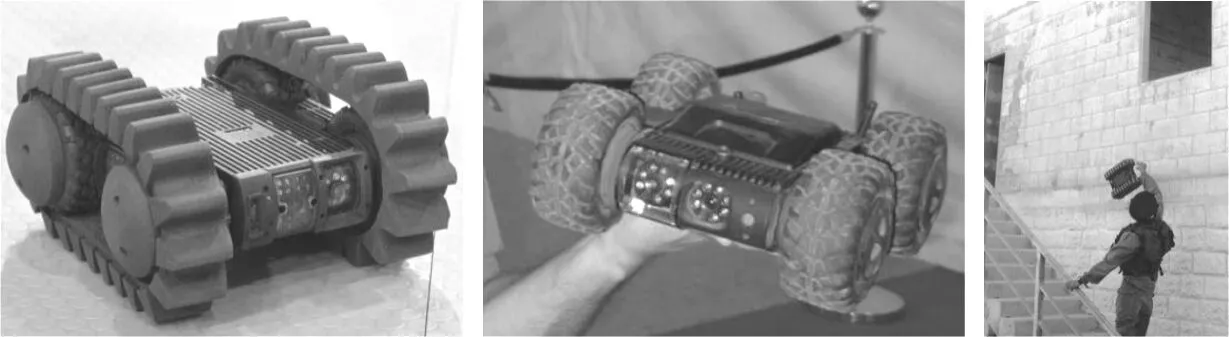
图3 以色列ODF光电公司研制的Eye Drive无人车Fig.3 Eye Drive UGV developed by Israel ODF company
新加坡 ST Kinetics公司研制了TTS和FSS侦察无人车[10],如图4 所示。由特战人员随身携带,并配备了红外传感器,可在昼夜环境下工作。双轮TTS 用于室内侦察时,可投掷到房间、狭窄区域,通信距离150 m。四轮无人车FSS能够在室内、室外碎石、沙子、岩石等多种地形环境中运动,并可以从6 m高度抛落。
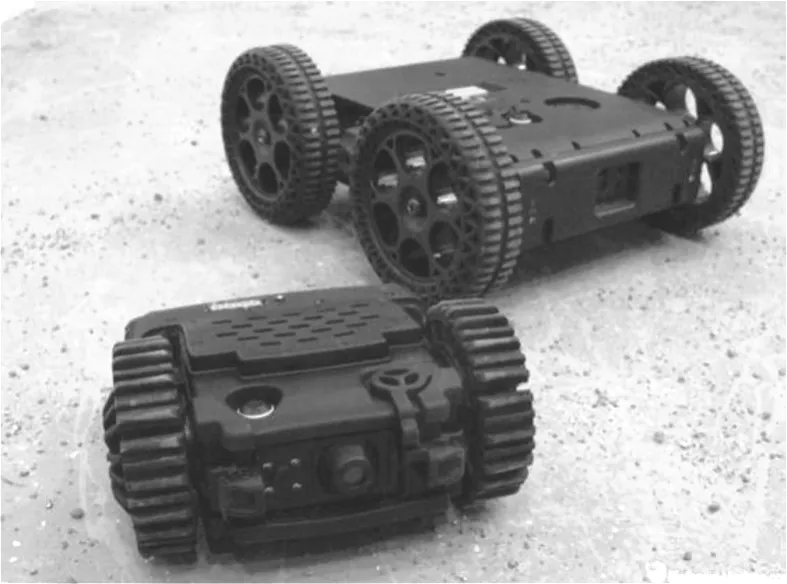
图4 新加坡ST Kinetics公司研制的 TTS和 FSS 无人车Fig.4 TTS and FSS UGV developed by Singapore ST Kinetics company
法国NEXTER公司研制了一款小型智能侦察无人车NERVA-LG[11]。NERVA-LG是一款通用性移动平台,车身周边配置4个摄像头,可实现360°全景侦察。此外,该无人车采用了模块化设计,可搭载20多种任务载荷(如可见光摄像头、红外摄像机、激光雷达、音频探测器、排爆防暴枪、生化探测器等),用于反恐、消防、防化、排爆、防辐射、地图测绘等工作。平台质量小于6 kg,可在水面行进,陆地要点巡视、活物检测等。通过门窗抛掷进入室内,可进行室内环境的侦察感知,如图5 所示。

图5 法国NXTER公司研制的NERVA-LG无人车Fig.5 NERVA-LG UGV developed by France NXTER company
1.2 国内研究现状
国内在地面小型无人车方面的研究起步较晚,开展研究工作的高校主要有哈尔滨工业大学、南京理工大学、北京理工大学、东南大学等。但总体来说,院校在地面小型无人车的领域处于实验室研究阶段,技术水平尚未达到实战应用阶段。国内开展小型地面无人车研制工作的部分企业主要有北京晶品特装科技有限责任公司[12]、哈工大机器人集团[13]、南京聚特机器人技术有限公司[14]等。
北京晶品特装科技有限责任公司研制了轮履排爆无人车(JP REOD400)、轮履侦察无人车(JP RS16)、以及投抛式侦察无人车(JP RM14),如图6 所示。其中,JP REOD400无人车配备有7个摄像头,具有多视角显示能力,红外夜视距离≥30 m,低照度下可自动开启红外照明。JP RS16前置摄像头具有俯仰功能,并配置多组红外灯模块,可实现昼夜环境下的大视角侦察。JP RM14可抛投于建筑内或狭小空间执行侦察任务,并配备有红外光模块,可实现昼夜侦察。以上产品可用于城市反恐、隐蔽侦察等场合。

图6 北京晶品特装研制的小型侦察无人车Fig.6 Small UGV developed by Beijing Jingpin Tezhuang
哈工大机器人集团开发了地面无人侦察车,但主要以大中型地面无人侦察车为主,一些小型的无人车如图7所示。包括小型侦察排爆无人车(车身配备有4组摄像头,机械臂也配备有摄像头)、轮式车底盘检查无人车(车顶配置有摄像头,具有高分辨率图像显示及可疑点局部放大功能)、武装打击无人车(车身配备有4组摄像头,枪用光瞄系统配有高分辨率摄像头)等。以上产品可用于边境巡逻、城市反恐等领域。

图7 哈工大机器人集团研制的地面小型侦察无人车Fig.7 Small UGV developed by HRG
南京聚特机器人技术有限公司针对地面小型侦察无人车开展了研究工作,研制了图8 所示两款小型无人车。其中,两轮无人车具备视频和语音采集功能,采用智能终端遥控,可适用于建筑物内部或者狭小空间侦察的需求,履带式无人车也配置有摄像头和声音传感器,执行排爆和探测任务,以上产品可用于武警、消防等危险场所的侦察。

图8 南京聚特研制的地面小型侦察无人车Fig.8 Small UGV developed by Nanjing Uni-Specialized
从国内外的研究现状来看,国外在地面小型无人车领域走在前列,并且在军民领域已有大量的应用,甚至作战场合下进行了实地考验,在智能化程度、可靠性、操控性等方面具有明显的优势。与国外相比,国内研制的地面小型侦察无人车在功能及性能(工程化、模块化、轻量化、通用性、操控性)等方面还处于较低的水平,有待于进一步提升,装备较少。
2 地面小型无人侦察平台的组成及功能特点
2.1 地面小型无人侦察平台的组成
根据国内外的研究现状以及使用需求可知,地面小型无人侦察平台主要由行走系统、感知系统、车控系统、显控系统和任务载荷等几部分组成,如图9 所示。无人平台内部传感器主要包含有:任务管理板、图像处理板、力矩电机、轮胎/履带、电池、天线、摄像头、GPS、IMU等。

图9 地面小型无人侦察平台组成Fig.9 Composition of small UGV
2.2 地面小型无人侦察平台的功能特点
地面小型无人侦察平台的主要功能及特点如下:
1) 体积小,质量轻,便于单兵携带,能够从门窗、破洞等进入室内、或者通过门窗抛入室内,需具备良好的抗冲击性能;
2) 具备良好的运动能力,除了能够在平地快速行进外,还应能够攀爬楼梯、越过低矮障碍物等;
3) 具备一定的自主行进能力,无人平台通过自身携带的光电、音频、超声波等传感器对环境感知,自主行进和监视,并将目标状态数据和环境信息通过无线通信模块回传操控人员,由操控人员做出决策;
4) 通过搭载光电载荷可构建环境地图,完成实时避障、导航、目标跟踪、路径规划以及其他任务;
5) 通过搭载枪械、排爆等武器设备完成对危险人员的打击和爆炸物的检测及排爆等。
3 地面小型无人侦察平台的发展趋势及关键技术探讨
3.1 地面小型无人侦察平台的发展趋势
小型地面无人侦察平台通常是在未知或者非结构化环境中工作,且在操控人员视线之外,因此,具有局部自主能力的智能化无人侦察平台将具有广阔的应用前景,是未来无人平台的主要研究方向。随着科技的进步,新材料的应用,网络化、智能化、大数据等技术的快速发展,未来地面小型无人平台的发展将更多趋于以下几个方面。
1) 智能化。开展基于多传感器的环境感知和控制研究,在无先验地图环境下能够完成环境地图构建、实时避障、导航等任务。开展人工智能、机器学习等方面的研究工作,能够对人员等典型目标进行识别与跟踪,使无人平台具备更高的智能化。
2) 模块化。采用通用化的接口设计,能够根据不同的使用环境搭载不同的模块化载荷,同时开发模块化可见光载荷、模块化红外光载荷、模块化多波段光电载荷等,执行侦察、搜救、检测等任务,满足产品多样化和低成本的需求。
3) 基于移动网络的数据传输。对于地面无人平台,采用传统的无线传输(目前多数采用2.4 GHz传输技术)距离受限,容易受到阻挡。军用或民用4G/5G移动网络(公网/专网),具备图像及视频数据传输能力,可实现专网/公网无缝切换,达到通信无盲区的效果,摆脱地面站控制距离的限制,借助移动通信网络还可跨地域工作[15]。
4) 环境适应性。开展结构形式优化、新型驱动方式和新型轻质材料的应用研究,以适应高低温环境、水中、陆地、砂石、台阶等各种非结构化地形的使用,并且满足单兵便携可靠使用的需求。
5) 平台集群化。单一无人平台难以适应复杂多变的战场环境,无法及时有效地完成指定任务。为同时满足侦察、打击、监视、排爆等多任务的执行能力,未来无人平台将向集群化方向发展,并借助于模块化设计,根据作战需求选装不同的任务载荷,快速提升系统的侦察打击能力。
3.2 地面小型无人侦察平台的关键技术探讨
根据地面小型无人侦察平台的发展趋势可知,现阶段及未来几年地面小型无人侦察平台需要解决以下几方面的关键技术问题:
3.2.1 无人平台系统集成及工程化设计
地面小型无人侦察平台具有体积小、质量轻的特点,是一个高度集成的系统,包括电路板集成、传感器集成、结构拓扑优化、高性能轻质材料以及复合材料的应用等。因此,为满足使用需求,系统集成以及工程化设计是面临的首要问题,这需要从高性能嵌入式计算机模块、图像处理模块、零部件优化、材料优选、试制加工、装配工艺、伺服电机及控制器等设计入手,使所设计的无人平台整机性能最优,满足不同环境对无人平台功能的需求。
3.2.2 基于多传感器信息融合的无人平台导航与定位技术
自主导航和定位可用于提升无人平台的自主化与智能化水平,涉及的技术有:传感器信息融合、地图重建、路径规划和障碍物躲避算法等。地面小型无人平台主要是在室内、室外两种环境下使用,在室外环境下研究的重点主要是基于GPS、IMU、电子罗盘等传感器实现定位与导航。
室内环境下,由于缺乏先验地图信息和GPS位置信息,大大增加了导航与定位技术应用的难度。因此在室内无先验地图情况下,自主路径规划和障碍物躲避算法是技术难题。目前比较成熟的方案有激光雷达、单目视觉、双目视觉等SLAM技术(同时定位与建图技术)[16]。视觉SLAM技术相对于其他技术,采用的是视觉传感器,具有被动式获取、精度高、图像直观、硬件成本低、数据量大等特点,基于双目视觉、里程计、IMU等传感器的无人平台定位与导航等是需要突破的关键技术之一。
3.2.3 目标识别算法加速优化及其在嵌入式平台的应用技术
目前的识别算法在工程化应用中,难于兼顾处理实时性和识别精确性。地面小型无人平台所能提供的空间和能耗有限,无法使用大型运算设备,因此需要使用计算能力有限的嵌入式设备来完成深度学习,满足地面小型无人平台目标识别时的实时性要求。目前主流的识别算法有SSD、YOLO、RCNN等[17-18],但需要优化深度学习网络结构,精简网络参数,应用多线程技术,更换更高效的网络框架等,从软件方面提升识别处理速度。此外,还需要开展高性能嵌入式处理系统(如ARM+GPU架构)的应用技术研究,发挥GPU单元和深度学习加速器的强大处理能力,从硬件方面提升识别处理能力。
3.2.4 模块化小型化多波段光电载荷设计技术
地面无人平台由于受体积质量的限制,难以布置多种光电传感器,而采用模块化接口设计,可为模块化载荷的安装预留空间,满足无人平台在多种环境下的作业需求。目前无人平台用于监视侦察时,安装的侦察装备主要是可见光或红外光载荷。受限于载荷的体积质量指标要求,还缺少同时集成两种及以上波段的小型化光电载荷,以满足产品多样化和低成本的需求。这就需要综合考虑传感器集成化(可见光/红外、视频处理板、伺服控制板、惯性传感器、电源模块等)、结构布局优化、电源功耗等众多问题。因此,模块化小型化多波段光电载荷是无人车侦察装备研究的重点。
3.2.5 集群分布式多无人平台协同控制技术
地面无人平台集群技术通常借鉴自组织机制,使能力有限的多个独立的无人平台,通过相互信息交互产生协作效应,并根据任务需求,环境情况以及目标危险等级,优化单体分工,选派最佳任务单体或组合完成任务,提升整体的作战效能。这就需要在无人平台集群组网与信息传输技术、无人平台任务规划与协同控制技术,无人平台集群协同态势感知技术等方面开展深入的研究工作。
4 结束语
针对地面小型无人侦察平台,介绍了其在国内外的研究现状和技术水平,分析了无人平台组成及其具备的典型功能特点(便携性、隐蔽性、灵活性),明确了地面小型无人平台未来的发展趋势(模块化、智能化、集群化)。基于无人平台的应用需求,功能特点和发展趋势,提出了系统集成及工程化设计,基于多传感器信息融合的无人平台导航与定位,目标识别算法加速优化及其在嵌入式平台的应用,模块化小型化多波段光电载荷设计、集群分布式多无人平台协同控制等关键技术问题,也是地面小型无人侦察平台的重点发展方向。