消费型无人机构建工程堆土地形模型的方法及精度评价
2019-12-11刘万青
梁 石,刘万青,王 宁
(1.西北大学 城市与环境学院,陕西 西安710127;2.陕西测绘地理信息局测绘开发服务中心,陕西 西安710054)
随着经济建设迅猛发展,城镇化快速推进,生产建设项目密集布局。建设项目的开挖、堆叠、采掘等活动破坏土壤结构和覆盖植被,改变原有地貌地形,削弱水土保持能力,同时形成大量松散堆积物,极易造成水土流失[1]。生产建设项目水土流失是一种典型的人为扰动带来水土侵蚀加速现象,潜在危害性大,对生态环境破坏性强[2-3],引发和造成城市内涝加剧,PM2.5和雾霾危害加重,热岛效应和极端天气增加,城市水功能削弱,生态环境恶化[4]。促进城市生态文明建设和健康可持续发展,急需有效开展水土流失防治工作。水土流失监测是水土保持生态修复和综合治理的基础,是国家生态建设决策的有力保障[5]。强化建设项目施工准备期和建设期的水土流失监测和监控,是防止水土流失和环境破坏、减轻水土流失危害的最直接有效的方法[6]。对建设项目施工中形成的堆土地形构建高精度地形模型,及时掌握建设项目地形时态、堆积范围以及土石方量变化,能够为水土保持方案实施和监测提供实时可靠的数据参考和决策依据[7-8]。传统的监测手段有着受环境干扰强烈、精度低、外业工作强大等缺点,卫星遥感影像也存在分辨率低,监测周期长的不足,难以适应水土保持监测快速化、自动化、精确化的发展要求[9]。将无人机航空摄影技术和GIS技术应用于生产建设项目构建高精度堆土地形模型和土石方量精准测量进行水土保持监测必将是今后发展趋势[10-11]。田金梅等[12]利用无人机技术对渣场的扰动面积、堆渣方量、水土保持措施信息进行提取,分析得出渣场的动态变化。
无人机根据设备价格、机型大小和针对群体的不同分为消费型和专业型。消费型一般设备价格都在万元左右,针对用户群体广,操作简单,一般都自带相机。专业型一般在十万元以上,载重量大,可以搭载多种专业传感器,针对某一专业领域用户,飞手需要专业训练,性能优于消费型无人机。近些年来,消费型旋翼技术的逐渐成熟,其稳定性、安全性、定位精度、相机性能的大幅度提升,计算机视觉技术的发展,使得处理海量无序、不同分辨率的大角度倾斜影像成为可能[13]。消费型旋翼无人机成本低,体积小,机动灵活,低空飞行无须申请空域、无须证照,非专业技术人员能够操作在复杂狭小的城市空域飞行航摄,镜头角度可任意调节能够倾斜航摄进行建模,增加侧立面纹理信息,配合少量控制点构建高精度地形模型为水土保持监测精准分析提供了新的技术方法。曾麦脉等[14]利用微型无人机制作正射影像和三维模型在水蚀侵蚀调查中应用,降低成本、提高效率和增加可靠性。
使用消费型旋翼无人机航摄构建具有高精度,丰富纹理的可视化地形模型[15-16],不受场地环境限制,单独作业,避免与施工现场的相互干扰,能够快速、准确、高频次、直观的以三维地形模型的形式反映建设工地或者弃渣场的扰动面积,堆弃方量和水土保持措施等变化情况,为生产建设项目水土保持监管提供技术支撑[12,17],分析消费型旋翼无人机构建工程堆土地形模型的精度也显得尤为重要,为动态时相叠加分析,扰动面积和土方测量提供数据精度参考。本文使用消费型旋翼无人机以生产建设项目工程堆土地形为试验区,使用常规垂直下视航摄和45°与70°两个角度分别倾斜交叉航摄2种航摄方法配合少量控制点构建地形模型,比较不同航摄方法在无控制点和少量控制点时的相对精度、绝对精度和一定范围的周长、面积和土方精度,分析航摄方法及控制点数量的适用性。
1 研究材料
1.1 试验区概况
试验区位于陕西省西安市长安区潏河湿地公园建设工地南部,选区大约长150 m,宽80 m,高差大约15 m。试验区域根据公园设计图初步建设为由堆土、缓坡、基坑、管道坑组成的复杂区域。研究区域均为裸土,无植被覆盖,部分区域有防尘网覆盖,构建地形模型及量测不受影响。
1.2 软硬件设备
本次试验消费型旋翼选用大疆精灵4pro,单次飞行时间最长为25 min,其采用双定位系统,航摄影像具有较高精度的摄站点坐标。航摄相机使用精灵4pro自带相机,采用1英寸CMOS传感器,8.8 mm(35 mm 等效24 mm)焦距,可以自动对焦1 m 至无穷远。云台俯仰角度可-90°至+30°调整,能够满足俯仰角度进行倾斜摄影。本文所有的相机倾角是相机主光轴与水平面的夹角,都以正值表示。机身自带避障系统,可在复杂区域飞行,安全性得到保证。
无人机地面站航线规划使用大疆公司的DJI GS Pro,可以根据摄区要求设计航线,设置镜头角度和相机参数。航摄采用定点悬停曝光,可消除等距离或等时间曝光的像点位移,提高影像质量。数据处理软件使用俄罗斯Agisoft公司开发的自动化三维建模软件AgisoftPhotoScan(简称PhotoScan)。它基于多视图三维重建技术,可以通过控制点辅助或根据影像匹配对任意类型的图片进行处理,自动化地完成相机参数的解算与三维重建。PhotoScan构建地形模型运算量和数据量都比较大,对计算机内存要求比较高,本次试验使用32G 内存,16核戴尔工作站。
2 研究方法
2.1 控制点布设与量测
地面控制点是使用GNSS接收机或者全站仪等测量设备测量的空间点已知坐标,一般以区域网四周布设既有平面坐标又有高程坐标的平高控制点和中心区域布设只有高程坐标的高程控制点形成控制网布设在航摄区域内[18],使用GNSS可全部测量为平高点。控制点可以提供与航摄影像上对应点的精确位置信息,为影像数据处理提供数学基础。
试验区地物单一,难以寻找已有的地面特征点作为控制点,在航摄前需要布设控制点靶标,采用A4纸打印黑白对三角粘贴在硬纸板上固定于地面,对三角顶点作为控制点测量靶标,在影像上清晰可见(如图1所示)。

图1 地面控制点及其在影像上的表现
研究区域共布设21个控制点,首先在研究区域最外围设置四角和区域中心控制共5个控制点,形成基础控制网。然后在试验区域两条长边的中间各增加一个控制点,这7个控制点形成周边6点中间1点的控制网。其余14个控制点均匀分布在研究区域内部,尽量使这些控制点布设在地形高差变化较大的区域。航摄过程有一个控制点被移动,处理数据的过程中只使用了20个控制点,点云模型上的控制点布设位置如图2所示。
控制点测量使用上海华测RTK 系统测量,获取WGS84经纬度和正常高。控制点起算点使用西安潏河湿地公园施工现场工程测量的控制点起算点,数据质量良好,符合国家现行标准,根据施工方控制测量经验和以往成果,控制测量相对精度优于1 cm,绝对精度优于2 cm。

图2 地面控制点云模型及控制点分布
2.2 航摄数据获取
使用大疆精灵4pro对试验区进行航摄,为了对比分析垂直和倾斜两种航摄方法在不同数量控制点时构建地形模型的精度,对试验区进行常规垂直下视单次航摄,航线如图3a所示,45°倾斜交叉航摄和70°倾斜交叉航摄,航线如图3b所示。

图3 陕西省西安市长安区潏河湿地公园飞行航线
对试验区采用3种航摄方案进行航摄试验,航摄时间为11点至15点之间,天气晴朗,空气能见度良好。航摄范围内无高大建筑物,试验区周边有行树,为了保证安全,航高均设定为45 m,垂直下视时地面分辨率为0.012 3 m,45°和70°倾斜航摄航高设定与垂直下视时相同,地面站无法计算倾斜时地面分辨率,依据相机的像元大小ρ,焦距f,航高H 以及倾斜角度ɑ 计算45°和70°倾斜时地面分辨率(GSD)分别为0.0174 m 和0.0131 m,GSD 计算如式(1)所示。

3种航摄方案的航摄因子见表1。

表1 陕西省西安市长安区潏河湿地公园航摄因子
依据航摄参数进行航摄飞行,数据自动存储在机身所带的存储卡中,影像数据为JPG 格式,视觉效果良好,45°倾斜航摄因为倾斜角度关系影像质量略差。每幅影像中包含拍照摄站点的GPS位置信息。
2.3 数据处理
数据处理软件使用俄罗斯Agisoft公司开发的三维建模软件AgisoftPhotoScan(简称PhotoScan),自动化程度高,无需相机检校文件。由于45°倾斜航摄影像质量过差,控制点标记难以识别,在处理过程中舍弃了此种方案,只对垂直下视和70°倾斜两种航摄方案进行了数据处理。处理过程如下。
(1)数据导入与影像质量检查。添加影像至软件中,PhotoScan会根据影像记录的GPS信息自动将影像排列,人工检查试验区覆盖完整,中间无影像丢失。使用软件自动检查影像质量评分,如若评分低于0.5分(评分在0~1之间),则相片存在曝光,对焦,虚化等问题,不适合后续处理建模[19]。此次航摄垂直下视和70°倾斜影像质量均满足要求。45°倾斜航摄影像数据由于倾斜镜头主光轴与此试验区起伏较小的地形构成的角度过小,地物在影像上拉伸变形严重,评分多数低于0.5分。
(2)相机参数初步估计。相机参数包括相机的内畸变参数与影像的外方位元素。PhotoScan 软件可以不需要相机检校文件,通过在各影像中自动提取特征点,根据记录的GPS位置信息将影像恢复到空间大致位置,选取相邻重叠的影像互相匹配,初步计算出相机参数和外方位元素,匹配点形成稀疏点云。在PhotoScan中操作为对齐照片,此次试验对齐照片精度选择优。
(3)控制点标记与投影。在一幅影像上标记控制点靶标,稀疏点云会自动计算和标记有此控制点的其他影像,位置会有偏差,需要人工逐一检查挪动校准。标记完成所有控制点后将控制点坐标整理为相应格式添加至系统中,控制点坐标点号必须与标记点号一一对应。在软件中将添加的控制点坐标和影像记录的GPS信息按照108°中央经线,高斯3度投影为平面坐标,高程使用1985年国家高程基准。
(4)相机参数优化。在进行相机参数的优化估计之前,将远高于或者低于稀疏点云模型的明显错误飞点删除,对稀疏点云模型进行预处理,选择需要的地面控制点参与空三计算,优化相机参数。此次试验中影像质量评分低的45°倾斜航摄数据匹配出的稀疏点云明显错误飞点过多,删除错误点后点云漏洞明显,耗费大量人工难以完全修补稀疏点云,构建稠密点云模型仍然存在明显漏洞和错点,未进行后续优化处理建模和分析。
(5)稠密点云模型构建与地形模型生成。相机参数优化后生成高精度稠密点云模型,此次试验稠密点云模型生成精度设置为优。根据稠密点云模型构建TIN 和生成地形模型,生成的地形模型地面分辨率为0.25 m,点云模型如图2所示。
3 结果与分析
3.1 相对精度分析
垂直下视和70°倾斜航摄两种方法在无控制点、四角和中心5个控制点、周边6个中间2个8个控制点、13个控制点时进行空中三角测量计算。无控制点时利用试验航摄的影像数据中所记录的GPS信息辅助空三计算所有标记点的坐标,不同数量控制点时利用已选择的控制点进行空三运算计算未选择作为控制点的标记点的坐标,利用计算坐标进行距离计算,与对应实测的坐标计算距离进行比较,统计比较差值的平均值和中误差。此次试验选择较远点之间的13个距离样本,随着控制点数量的增加,当两个点都参与空三计算时不进行距离统计。不同数量控制点的平面和高程相对误差的平均值和中误差见表2和表3。

表2 航摄平面相对距离差 m
由表2—3可以看出:①无控制点时垂直下视航摄平面相对精度可达到0.5 m 以下,高程精度达到0.15 m 以下,70°倾斜交叉航摄平面在0.7 m 左右,高程在0.2 m 左右,无控制点时垂直航摄无论是平面还是高程相对精度优于70°倾斜交叉航摄,两种航摄方法都可以达到亚米级精度。②在只有5个控制点时,垂直下视和70°倾斜交叉航摄的平面相对精度已经可以达到0.05 m 以下,70°倾斜交叉高程相对精度可达到0.05 m 以下,垂直下视依然在0.1 m 以上。
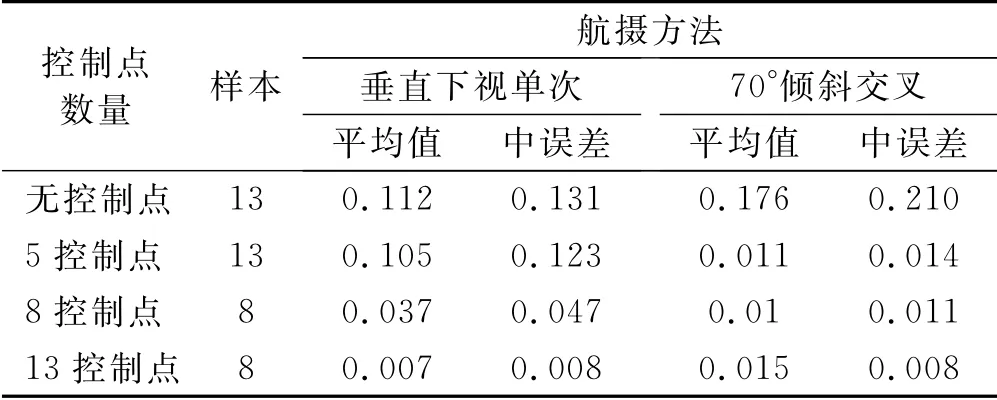
表3 航摄高程相对误差 m
控制点的增加到8个和13个时,平面相对精度略有提高,基本保持一致在0.01 m 以下,高程相对精度倾斜交叉航摄一直优于垂直下视,13 个控制点时两者的高程相对精度在毫米级的差别,可看做基本一致。③无控和不同密集程度控制点的情况下整体内部相对精度垂直下视优于70°倾斜。
3.2 绝对精度分析
将所有的标记点添加实测坐标,选择5 个、8 个及13个作为控制点,其余的作为检查点,进行空三计算,对不同数量控制点时的控制点和检查点精度进行统计。控制点和检查点中误差统计见表4。检查点精度是反映成果精度的主要参考,中误差越大表示精度越低。

表4 控制点和检查点精度 cm
通过对比分析控制点精度和检查点精度,得出:①随着控制点的增多,垂直下视航摄平面和高程的控制点精度,检查点精度和总体精度随之提高。②70°倾斜航摄的平面控制点精度在8个和13个控制点时出现毫米级波动,可视为基本不变,平面检查点精度在5个和8个控制点时也出现毫米级波动,可视为基本不变。控制点平面精度随着控制点的增加基本保持不变,检查点平面精度在13个控制点时明显提升到2 cm。高程控制点和检查点精度都随着控制点的增加逐渐提升,高程检查点精度在5个控制点时已经达到1.59 cm,13 个控制点时可达到1cm 以下。③70°倾斜航摄平面控制点和检查点精度都低于垂直下视,而70°倾斜航摄高程检查点精度在控制点少量时(5个和8个)优于垂直下视,高程检查点精度与相对精度分析结果一致,少量控制点的情况下相对高程精度优于垂直下视。
3.3 地形模型面积与体积精度分析
以研究区域外围控制点的连线为范围线,对比分析两种航摄方法在无控制点、5控制点、8控制点、13控制点、全部控制点时生成的地形模型的范围线周长、面积和土方量,土方量以控制点最低点12号点高程为起算底面,如果12号点不作为控制点,则以其计算高程为起算底面高程。试验区DEM 及计算范围如图4所示。

图4 试验区DEM 及量测范围
通过相对精度和绝对精度分析,垂直下视添加13个控制点时精度可达到1 cm 左右,20个控制点时可达到毫米级,此时最接近真实值,因此将垂直下视在20个控制点时的周长、面积、土方量的测量值假定为真值,其中测定周长478.988 m,面积9 030.8 m2,土方量15 847.7 m3。周长、面积和土石方量的精度以航摄计算值与“真值”的差值百分比来表示,差值百分比数值越小,说明越接近实测值,则精度越高。差值百分比计算如式(2)所示。

根据式(2)计算周长、面积和体积的差值百分比,计算结果如表5所示。
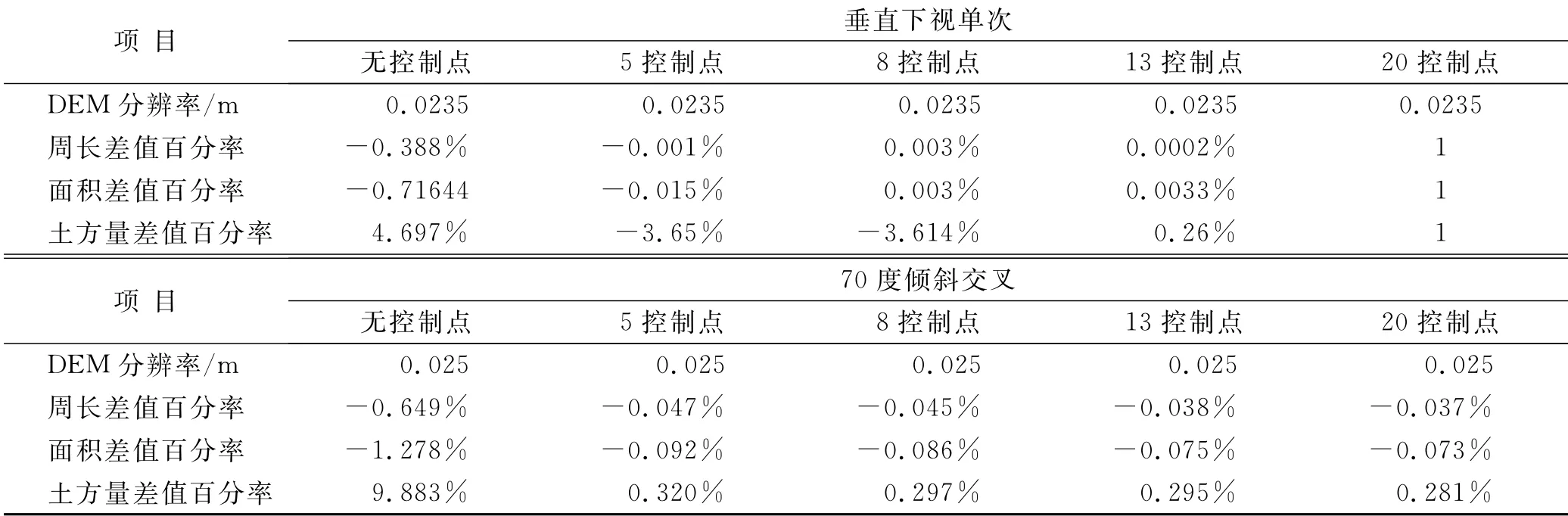
表5 试验区DEM 面积和体积差值百分率
由表5可知:①此次试验中垂直下视单次航摄周长和面积都优于70°倾斜交叉航摄,与相对精度和绝对精度分析过程中垂直下视的平面精度要优于70°倾斜交叉航摄一致。②无控制的情况下70°倾斜航摄的土方误差接近10%,垂直下视土方误差只有4.7%,土方量测量垂直下视优于70°倾斜。添加周边四角和中心共5个控制点时70°倾斜交叉航摄土方测量误差低于1%,优于垂直下视单次航摄的-3.65%,增加到8个控制点时与5个情况类似,稀少控制点时,土方测量70°倾斜交叉航摄优于垂直下视,与精度分析中稀少控制点时70°倾斜交叉航摄平面相对精度略低于垂直下视而高程相对精度明显优于垂直下视结论一致。控制点增加到13个时垂直下视略微优于70°倾斜交叉,两者趋于一致,都逐渐接近于真实值,可达到0.3%以下。③70°倾斜交叉航摄在5 个控制点时土方测量已经可以达到很高精度(0.32%),随着控制点的增加,精度并无显著提高。垂直下视航摄在稀少控制点(5个和8个)时,土方测量精度在3.6%左右,当控制点增加到13个时,土方测量精度明显提升,分析其原因,从相对精度统计分析可以得出:垂直下视13个控制点时平面精度相对于5个和8个控制点时提高变化较小,而高程精度明显提升,从而影响土方测量精度。
4 结论与讨论
通过以上试验利用消费型旋翼无人机不同航摄方法不同数量控制点对建设堆土地形构建地形模型,分析其相对精度、绝对精度、量测面积和土方精度,得出:
(1)由于建设项目堆土地形起伏较小,45°倾斜航摄时,镜头主光轴与地形构成的角度过小,与航摄时航摄平台倾角过大相似,会使地物在影像上拉伸变形严重,影像质量降低,难以数据匹配和构建正确的点云模型。
(2)垂直下视和70°倾斜航摄建模平面和高程精度都随着控制点的增加精度逐渐提高。无控制点时,垂直下视航摄平面和高程相对精度都优于70°倾斜交叉航摄,两种航摄方法都可以达到亚米级精度(垂直下视优于0.5 m)。无控制点时垂直下视周长和面积误差小于1%,土方测量误差小于5%。
(3)添加不同密集程度控制点时无论是相对精度还是绝对精度,垂直下视的平面精度依然优于70°倾斜交叉航摄,而高程精度70°倾斜交叉航摄优于垂直下视,可见倾斜交叉航摄能够提高高程精度。只有四角和中心5个控制点(稀少控制点)时垂直下视土方误差小于4%,而70°倾斜交叉航摄可以低于1%,两者的周长和面积误差此时都小于0.1%。
对消费型旋翼无人机垂直下视航摄和倾斜交叉航摄建模的相对精度、绝对精度和周长、面积、体积土方精度的综合分析,起伏变化比较平缓的建设工程堆土地形在精度要求较低,难以布设控制的情况下可以使用垂直下视大重叠度航摄即可满足土石方测量误差小于5%的普遍要求[20];精度要求较高,可以布设少量控制点时,使用70°倾斜交叉航摄,提高土方量测量精度,面积和周长虽然精度略低于垂直下视,但也能够达到非常高的精度。消费型旋翼无人机在建设工程堆土地形构建地形模型及面积、体积量测在无控和稀少控制点具有很高的精度,能够满足多数情况下的应用需求。
利用消费型旋翼无人机对生产建设项目水土保持监测可以快速反应,随时可以增加监测频次,实时动态掌握水土流失变化[3];外业工作量小,对测量环境要求低,与地面施工互不影响,即使在无控制的情况下也可以达到很高精度;飞行高度低,分辨率高,成果种类多样化,模型视觉直观,数据内容可靠,水土保持措施和堆弃变化量精准直观反映[14];有效解决传统监测方式下的“到不了,看不全,效率低,精度差”等问题,逐渐成为开发建设项目水土保持监督监测的一种重要手段[21]。
