基于BIM的放样机器人智能放样及测量施工技术
2019-12-10张梅黄凯戴超袁渊王涛
张梅 黄凯 戴超 袁渊 王涛

摘 要:传统的测量放样方法是通过对施工图纸进行分析计算,得到待测设点的相应坐标、标高及轴线位置等数据,然后将待测设点的相应坐标、标高及角度等信息导入水准仪、经纬仪和全站仪等测量仪器,最终实现测量放样定位。然而这种测量放样方法工程量大、测量效率低下,尤其对于结构形式复杂的异形建(构)筑物,传统的测量方法更是力不从心。随着我国建筑技术的不断发展,BIM技术虽然进入中国不过短短十几年的时间,却已经深刻地影响到国内建筑行业的几乎所有从业人员,它已经引发了一场关乎技术、管理、理念的革命。然而在施工建造阶段,如何将经过修改和验证的三维模型落实到工地现场,真实地体现设计人员的意图并将BIM数据成果转换为指导现场施工,则配套的智能放样及测量施工技术已是亟需解决。
关键词:BIM技术;放线机器人;智能测量放样;多功能集成放样
中图分类号:TU767 文献标识码:A 文章编号:1671-2064(2019)20-0094-04
1 工程概况
重庆约克北郡商业项目位于重庆市两江新区,总建筑面积约43万m2,包括4层地下车库、6层商业裙楼和两栋31层5A甲级写字楼,总建筑高度145.5m,如图1所示。是集高端写字楼、环球佳肴、室内大型植物园为一体的超大型城市综合体项目,建成后将成为北重庆商业旗舰标志性建筑。该项目裙楼外立面和中庭区域的结构形式为曲面弧形结构,地下室顶板至裙楼屋顶范围设计有西南首例的超大型异形曲面空间钢结构玻璃幕墙植物园,施工放样测量难度系数极大。
2 施工工艺流程
基于BIM的放样机器人智能放样施工工艺流程主要包括:BIM模型建立、BIM模型导入、放样机器人测站设定、模型测量点设置、放样测量和数据导出及应用等。
3 测量放样施工方法
3.1 BIM模型建立
应用BIM根据施工图纸建立结构、建筑、机电管线等BIM模型,建立BIM模型时需加强同测量放样人员沟通,确保测量放样所需要的相关放样参数信息完整有效。创建BIM模型应采用符合现行建模标准进行绘制,并需确保各专业模型的坐标、标高、轴网等信息与设计图纸一致,以及根据测量放样实际需求添加必要的相关特征点参数信息。建立BIM模型的过程中,宜按分楼层、分专业、分区域等方式完成BIM模型创建。
3.2 BIM模型导入
BIM模型按照设计图纸创建完成后,首先需将该BIM模型转换为放样机器人BIM移动手薄能够识别的DWG、RVT等格式,随后再将该文件拷贝至放样机器人BIM移动手薄的BIM智能放样软件目录。
通过BIM移动手簿上运行的Trimble Field Link软件实现打开、查看,并做旋轉、缩放BIM模型等操作,即可开始现场放样测量工作,如图2所示。
3.3 放样机器人测站设定
应用放样机器人进行放样测量时,通常采用后方交会测站法、已知点测站法和使用上一测站法进行测站设定,现场可根据情况进行自由选择设站方式。放样机器人仪器固定牢靠在三脚架上,按下仪器电源按钮启动该放样仪器,按下激光对中按钮进行粗略对中,再按下自动整平按钮进行精确整平。观察手簿电子水泡的水平情况,再次按下自动整平按钮以再次进行整平,如果自动整平存在误差,可手动调整水平螺旋辅助调平,使电子气泡彻底居中及仪器彻底对中,完成仪器的对中整平,如图3所示。
3.4 模型测量点设置
测量操作人员可在放样机器人的手簿上进行操作,从模型上直接捕捉创建点,任何从模型上创建的点都可以作为放样点,通过放样机器人设备被直接放样,如图4所示。
对于习惯于从计算机上操作抓点的用户,该放样机器人亦提供了在计算机上运行的操作软件,测量操作人员通过该软件在模型上捕捉创建点。然后将模型和点一起导入手簿,测量操作人员可以从手簿上同时查看点和模型。如果在现场操作时发现计算机上创建的点有遗漏,则测量操作人员通过在手簿的模型上捕捉创建点,直至点的数量符合现场需要为止。
3.5 放样及测量
3.5.1 添加放样点
放样机器人放样测站设立成功后便可进行放样点坐标的添加,添加放样点坐标主要有以下三种方式,分别为:直接从BIM模型上选择放样点、直接手动输入放样点坐标以及直接从列表中选择放样点坐标。
3.5.2 开始放样
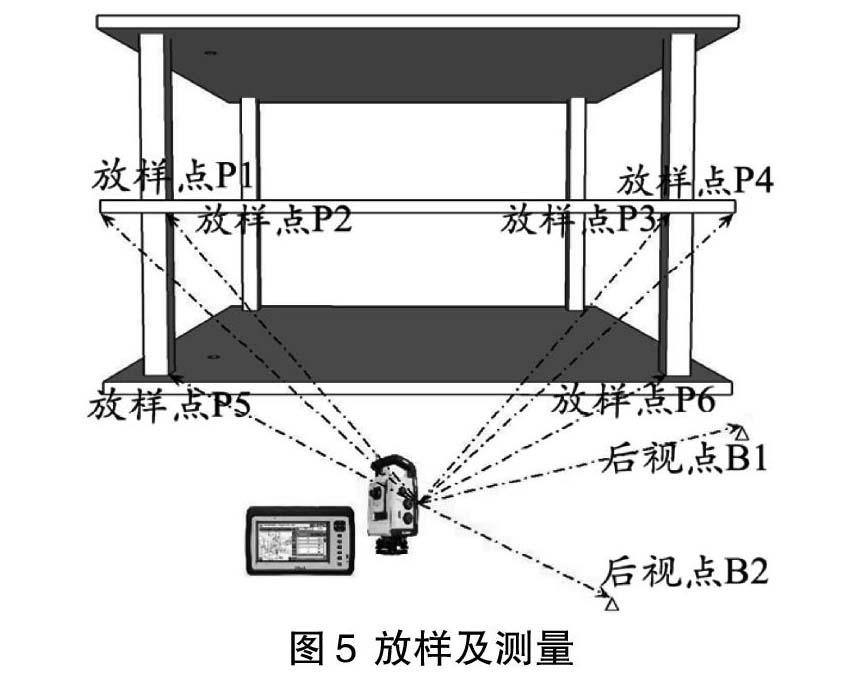
放样点坐标添加成功后便可以进行测量放样,可直接在功能菜单选择激光放样模式和棱镜放样模式。放样机器人采用免棱镜的激光放样模式进行智能放样更具有优越性。通过在手簿上的点列表中选择目标点,在免棱镜的激光模式下,点击“瞄准”则放样机器人自动转动,照准目标位置,在目标处显示高亮的激光点,工人在光点处做标记,即完成放样操作,如图5、6所示。
3.6 数据导出及应用
3.6.1 放样数据导出
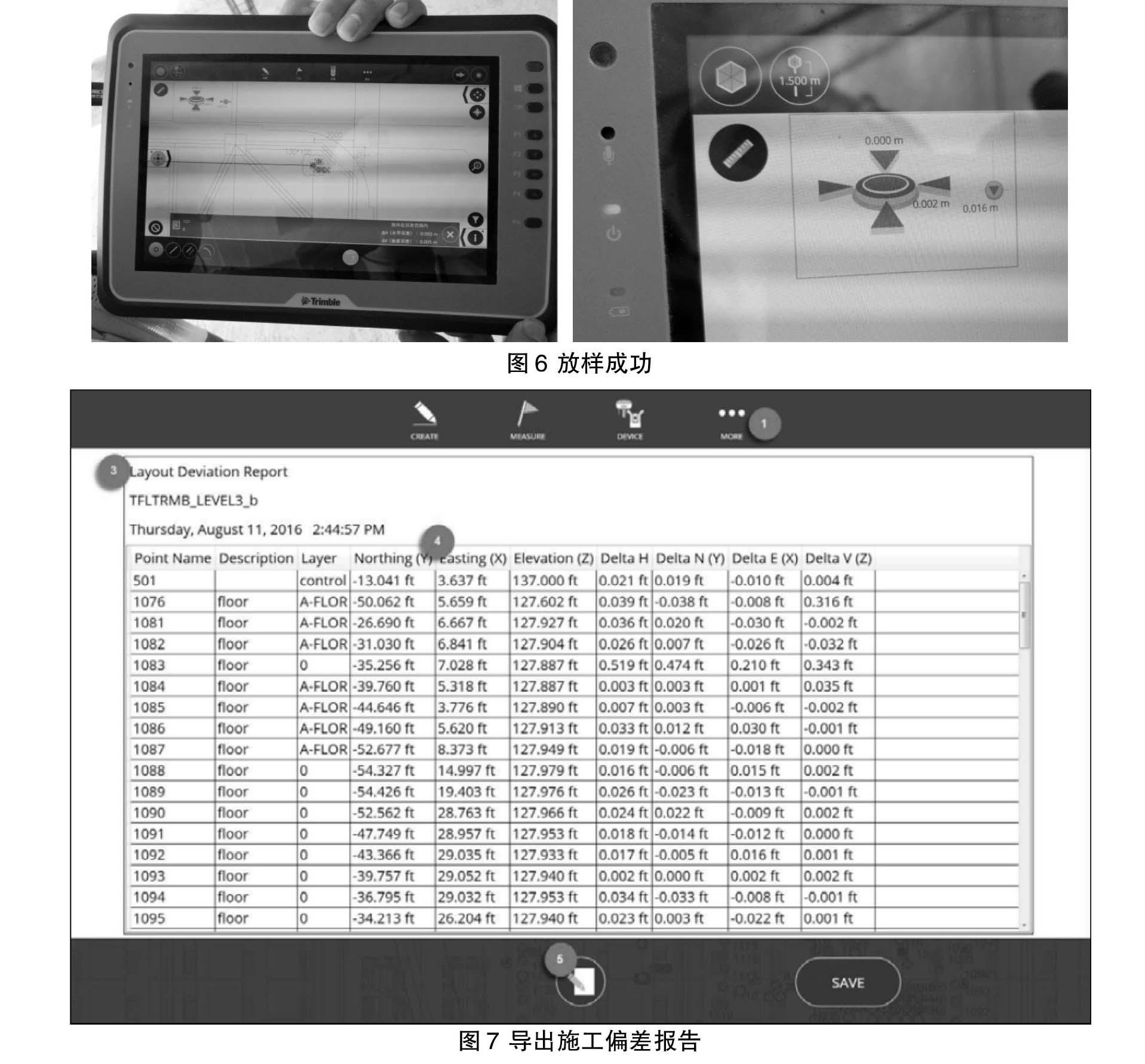
放样测量完成后即可导出放样数据成果,根据施工需求可导出放样施工偏差报告、日常放样汇总报告等,导出成果格式可为AutoCAD,SkethUp、PDF以及文本格式等。导出的放样测量数据成果包括点坐标的x,y,z三维坐标数据、点坐标的名称,点坐标的备注描述等信息,如图7所示。
3.6.2 设计模型复核及更新
根据放样结束后导出的测量放样成果,包括点、线目标,通过放样机器人自带的插件可再次导入AutoCAD或Revit模型中,用于对比实际放线和理论放线的误差,并将相关误差更新至BIM模型中,保证模型与现场一致,确保各专业间深化设计与现场一致。
4 质量控制措施
(1)用于放线的BIM模型必须精准无误,否则将对放线结果造成严重影响。(2)定期检测维护放样机器人主机马达,放样机器人主机驱动马达与水平度盘同轴,直接带动整机旋转,省略了齿轮、皮带等机械传动装置,避免了齿轮间隙、皮带松紧等因素造成的误差,使得测量成果的精度更高,而摩擦损耗更小,解决了长时间连续作业后测量精度降低的风险。(3)由于放样机器人采用激光投射目标点,则仪器基准站的选择应无大面积遮挡,应选择较为空旷的场地。以及本放样机器人仪器为通过外业平板电脑手簿进行操作测设,则需避开无线电干扰,确保周围没有干扰源,基准站点位应选择在较为空旷区域。(4)测量人员需特别注意对测量仪器的保护,规范操作,架设好基准站后尽可能安排人员看守,防止被外界扰动。(5)需按放样机器人使用说明书的要求进行定期校正检验,并需严格按照使用说明书的指导方法进行测量放样。
5 安全控制措施
(1)测量人员进入施工现场需正确佩戴安全帽,临边作业必须系好安全带,穿防滑鞋。(2)在放样测量时,放样处上下方需无人施工,避免交叉施工作业。(3)测量人员必须拿稳仪器,防止仪器坠落。(4)施测前应及时清理周边有掉落的模板木枋等材料,以免仪器碰撞或倾倒砸伤测量人员。(5)当仪器出现故障时,不得强行操作仪器,需立即查明原因或送检。
6 结语
本工程应用BIM技术根据施工图纸建立结构、建筑、机电管线等设计模型。再将建立的BIM设计模型直接导入放样机器人的手簿设备上,并通过在手簿上点击捕捉的方式创建点目标,然后测量操作人员只要点击该点目标,放样机器人将自动旋转直接照准该点,这样就可以将目标点放样到实地,省略了人工计算、手动输入的环节,并且简化了作业流程,提高了作业效率,而由于人工干预少,杜绝了计算错误和输入错误的机会,保证了放样结果的正确性。适用于应用BIM技术和放样机器人的住宅项目、公建办公楼项目、大型场馆项目以及基础设施类项目的测量工作,尤其适用于大型场馆、商业综合体项目和基础设施类项目的较复杂测量工作,为建筑业工程智能化测量放样积累了丰富的实践经验。
参考文献
[1] 方睿,周志易,高飞,李金超.基于BIM平台测量机器人在施工放样中的研究[J].工程勘察,2019(02):68-72.
[2] 童鹏程,张同波.BIM技术结合测量机器人放样功能在高层建筑领域的应用[J].测绘通报,2018(11):56-57.
[3] 郭伟.放样机器人在异形建筑内装修中的应用[J].建筑技术开发,2018(02):69-70.
[4] 范本,刘星,青舟.测量机器人在线施工放样软件研究[J].测绘,2011(06):256-258.
[5] 颜斌,黄道军,文江涛,樊冬冬,赵庆科.基于BIM的智能施工放样施工技术[J].施工技术,2016(S2):606-608.
