倾斜摄影与激光扫描技术结合的3D森林景观建模
2019-12-10曹明兰李亚东冯海英
曹明兰,李亚东,,冯海英,蔡 彩
(1.北京工业职业技术学院,北京 100042;2.北京林业大学 精准林业北京市重点实验室,北京 100083;3.北京市测绘设计研究院,北京 100038)
随着数字林业和精准林业建设的推进,森林景观可视化技术已在森林景观设计、林业区划设计、辅助森林管理及其他森林经营活动中得到了广泛的应用[1]。森林景观可视化可直观地展现森林的结构格局,记录和提取林木冠幅、郁闭度、公顷株数等森林计测因子。可通过叠加现出的火灾、病虫害及人为活动的空间数据来分析其对森林景观的影响,并模拟森林植被的动态变化过程,对开展森林演化研究及指导森林经营管理具有重大的现实意义。
森林景观三维建模是实现森林景观可视化的基础。由于森林具有典型的巨型复杂场景,森林冠层结构复杂、枝叶茂密、形态各异,用统一的场景建模方法进行渲染较困难。采用传统三维建模技术对森林景观建模时,建模周期长、工艺流程复杂、工作量大[2-3]。近年来,无人机航空摄影技术越来越多的应用于林业领域[4-5]。无人机倾斜摄影技术是近年来新兴的快速获取测区三维模型的有效手段,它突破了传统航测相机只从垂直角度拍摄的局限,同时从垂直、倾斜多个不同角度采集带有空间信息的航空影像,真实地反映地物的外观、位置和高度等信息,弥补了传统人工建模仿真度低的缺陷[6],逐渐应用于快速三维建模领域。森林冠层起伏频繁、形状不规则、树冠间相互衔接密闭、光线条件复杂、纹理重复度高、像对间存在非刚体性变化,因此利用倾斜摄影技术对森林景观进行三维建模时,易出现无法拍摄到林冠下景观、难以找到地面控制点等问题。背包式激光扫描仪体积小巧、扫描快速、精度高,能极大地提高三维建模外业数据采集效率[7],但无法获取林冠上部的纹理信息。
本研究提出一种无人机倾斜摄影与三维激光扫描技术相结合的森林景观三维建模方法,实现两种技术的优势互补。在充分利用无人机倾斜摄影快速获取林冠点云的同时,利用地面背包式三维激光扫描仪补充获取阴影及林冠下被遮挡部分的点云,配准融合获取两种点云后进行森林景观高精度三维建模,通过在潭柘寺森林景区进行实验,验证该方法的有效性。
1 外业数据采集
1.1 外业数据采集设备
1)无人机倾斜摄影系统
采用电动力六旋翼无人机搭载微型五镜头AP5600 倾斜相机的微型无人机倾斜摄影系统,可采集5 km2以内的倾斜摄影工作,数据分辨率最高可达2 cm,满足1:500 测绘精度需求,技术参数见表1。
2)背包式三维激光扫描仪
HERON 背包式扫描仪是由激光扫描仪、IMU、高性能计算机、锂电池及背包刚性架组成的一种高精度激光SLAM 同步定位与地图构建(Simultaneous localization and mapping)测量系统[8]。扫描精度能够达到厘米级,可同时建立厘米级测量的二维三维地图,能实现大场景建模、量测、成图、空间分析等功能,是高精度、高效率、低成本的室内外一体化三维扫描与测量的设备,其技术参数见表2。

表1 倾斜相机相关技术参数Table1 Relevant technical parameters of oblique cameras
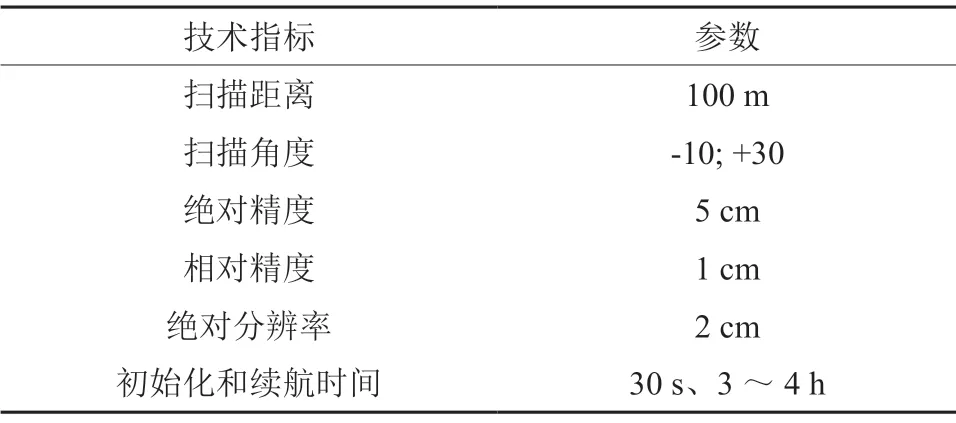
表2 Heron 背包式三维激光扫描系统相关技术参数Table2 Relevant technical parameters of Heron’s knapsack 3D laser scanner system
1.2 获取无人机倾斜影像
潭柘寺森林景区位于北京西部门头沟区东南部的潭柘山麓,具有丰富的自然、古迹景观。航拍区内以森林景观为主,有房屋、道路等人工设施。航拍严格遵循无人机航空摄影相关要求和规范,利用航线规划软件,根据测区平均基准面高程与最高点高程进行航线规划。设计无人机飞行航高150 m、航线规划9 条航带、航线间距45 m、航向和旁向重叠度均为75%,规划的航线如图1所示。飞行1 个架次,前、后、左、右、正5 个镜头每方向获取136 张影像。经现场检查,获取的影像清晰、色调饱和、不偏色、目视效果良好。
1.3 获取地面三维激光点云
利用背包式三维激光扫描系统,安装好主机后进行扫描仪、IMU、网络等接口连接,再进行扫描。数据采集与处理流程包括初始定位估计、位姿优化、分段地图与轨迹更新、融合解算等几部分(图2)。IMU 提供加速度与角速率,并获得系统的位置和姿态的初步估计[9],在作业过程中将新获取的位姿结果与已有结果进行优化,得到精确轨迹数据,再将生成的轨迹与激光扫描数据进行闭合环检测平差解算得到三维点云数据。图3是利用背包式三维激光扫描仪采集的树木点云。
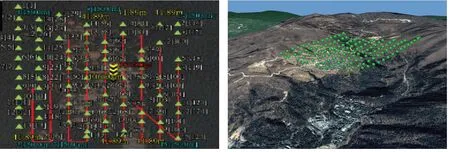
图1 测区航线规划Fig.1 Air route planning map in measured area

图2 背包式三维激光扫描流程Fig.2 Knapsack 3D laser scanner process

图3 背包式三维激光扫描仪获取的树木点云 Fig.3 Tree point clouds gained by knapsack 3D laser scanner
2 激光点云与密集点云融合建模
2.1 技术路线设计
无人机倾斜摄影系统从多角度拍摄获取倾斜影像,通过空三加密和匹配算法,从多视影像中提取更多特征点构成密集点云[10]。背包式三维激光扫描系统在地面上以一定角度扫描,直接获取地表物体的表面三维坐标,形成三维点云。两种方法均生成大量点云数据,为倾斜摄影获取的点云与三维激光点云的融合提供了可能。无人机倾斜摄影技术能够大面积、快速获取地物三维信息和纹理信息,但获取的地面物体精度偏低。背包式三维激光扫描系统获取的激光点云正好能够弥补无人机倾斜摄影的不足,能够精确获取地面物体信息和林冠下被遮挡区域的信息。本研究采用无人机倾斜摄影与背包式三维激光扫描技术相结合的三维建模方法,不仅提高模型精度,还可解决倾斜摄影三维建模林冠间出现漏洞、林冠下地物被遮挡、近地面模型局部拉花等问题,实现高精度三维建模,建模流程如图4所示。
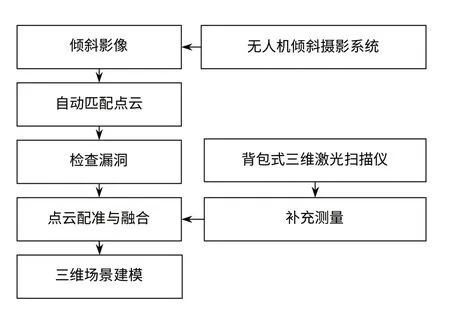
图4 三维场景建模流程Fig.4 3D scene modeling flow
2.2 倾斜影像生成密集点云
无人机倾斜摄影示意如图5所示。平差是基于共线方程模型,将像点在像平面的坐标线性化后,按照最小二乘原理得到一个近似解并迭代计算达到最佳值。以一张像片作为平差计算基本单元,在像片上量测控制点的像点坐标后进行区域网概算,确定区域中各像片的外方位元素及加密点坐标的近似值,再根据共线条件,按控制点和加密点分别列误差方程,在区域内统一平差计算,解算出各像片的外方位元素和加密点的地面坐标[11]。
设S为摄影中心,在世界坐标系下的坐标为(XS,YS,ZS),M为空间一点,在世界坐标系下的坐标为(X,Y,Z),m是M在影像上的构象,其像平面和像空间辅助坐标分别为(x,y,-f),(Xm,Ym,Zm),此时可知S、m、M三点共线,可得如下公式:


图5 无人机倾斜摄影示意Fig.5 Schematic diagram of UAV oblique photography
根据像平面坐标和像空间辅助坐标系之间的 关系可解得共线方程式:

式(1)式(3)中,x0、x0、f是像平面中心点的坐标和摄像机主距,是影像的内方位元素。共线方程式的一次项展开式为:

式(4)式(5)中FX0、Fy0为共线方程函数的近似值,dXS、dYS、dZS、dφ、dω、dκ为外方位元素的改正值,Xd、Yd、Zd为待定点的坐标改正值。根据式(3)列误差方程矩阵形式为:

引入权,列出加密点的误差方程并权赋1,列出控制点的误差方程并列出虚拟误差方程式,权赋P;按PVV∑ 最小建立的法方程为:

根据式(7)可求解外方位元素改正值和点的坐标改正值。
空三运算是获取倾斜影像后进行三维建模的关键步骤,也是对影像进行校正和绝对定向的过程。经过空三运算能够准确匹配多张影像上的同名点,影像上的任意点均具有空间几何信息,即具备定位性质和可量测性[12]。倾斜摄影技术在传统垂直镜头基础上又增加了4 个倾斜视角的相机,使不同视角影像之间有了更多的重叠组合。与传统的垂直影像相比倾斜摄影的多视影像有更多的冗余观测、同名点基线更长,导致倾斜影像空三加密的整体精度不如垂直影像,但仍然能够满足摄影测量的限差要求。本研究将航向重叠度和旁向重叠度均设置为75%,使倾斜影像之间有更多的同名约束,使其空三运算的精度和可靠性有所提高。获得倾斜影像后,采用Smart3D 自动建模软件,通过高精度的影像匹配算法自动匹配出所有影像的同名点,并从影像中抽取更多的特征点构成密集点云(图6)。

图6 倾斜影像生成的点云Fig.6 Point clouds generated by oblique images
2.3 两种点云配准与融合
通过影像自动匹配从航拍影像中抽取大量的密集点云,这些点云需要与三维激光扫描仪获取的三维激光点云进行配准和融合。为使两种点云数据格式保持一致性,数据融合前对点云进行配准。对两个点云数据集的配准,是在其中一个数据上进行旋转和平移,使两个点云相交区域完全重合。由于三维激光点云的精度远高于倾斜摄影测量,因此将两种点云数据进行配准融合的过程中,以三维激光点云为基准,使用迭代最邻近点配准法(即ICP 算法)和人工配准相结合的方法,将倾斜摄影获取的点云与三维激光点云进行配准,从而得到高精度的融合点云模型。ICP 算法是高层次基于自由形态曲面的配准方法[13-14]。主要目的是找到旋转和平移参数,将两个不同坐标系下的点云,以其中一个点云坐标系为全局坐标系,另一个点云经过旋转和平移后两组点云重合部分完全重叠。该算法通过不停循环,在两点云间找到最近的对应点并通过最小乘法迭代计算最优的坐标变换,即旋转矩阵R和平移矢量t,使得误差函数最小,基本过程如下:
1)对倾斜摄影点云中每个点,匹配背包扫描点云中的最近点。
2)求解使上述对应最近点对平均距离最小的刚体变换,求旋转矩阵和平移矢量。
3)使用获得的转换矩阵来转换目标点云。
4)迭代计算,直到迭代次数或误差小于阈值则终止迭代。这里的误差最小,可以是相邻两次均方根差的绝对值小于某一限差,公式如下:

式(8)中n为最邻近点对的个数,pi为倾斜摄影点云中的一点,qi为背包三维激光三维点云与pi对应的最近点,E为旋转矩阵,t为平移向量。
将无人机倾斜摄影获取的大量点云与背包式三维激光扫描点云进行配准融合。为了保证两种点云数据的格式一致,将点云数据格式转换为通用las 格式。由于HERON 背包式三维激光扫描系统扫描的点云精度远高于倾斜摄影获取的点云精度,因此在两种点云配准融合过程中,以三维激光扫描点云为基准[15],使用ICP 算法(最邻近点配准法)和人工配准相结合的方法配准,点云整体配准误差为2.37 mm,从而得到高精度的融合后的点云数据,配准精度示例如表3所示。如图7所示,点云蓝色部分为三维激光扫描的源点云,红色部分是无人机倾斜摄影获取的目标点云,利用算法将每个点和目标点云的最近点匹配,再进行匹配计算。本研究获得的点云密度和数据量较大,其内部含有更多的精细结构。

表3 三维点云配准精度Table3 Accuracy of 3D point clouds

图7 配准的三维点云Fig.7 Registering 3D point clouds
2.4 三维场景模型构建
单纯基于无人机倾斜摄影构建的局部三维模型,从顶部看森林、道路、房屋等地物的结构与轮廓清晰、纹理特征真实。但在侧面细节中,由于无人机拍摄角度导致林冠下被遮挡部分的模型漏洞和模糊不清等问题较严重。
利用三维激光扫描仪补充采集无人机拍摄不到区域的三维点云数据,将两种来源点云进行配准融合后再进行三维模型构建,能有效解决模型漏洞和模糊不清等问题。图8为点云配准融合后构建的森林景区场景三维模型效果图。从不同角度模型图可以看出,融合了激光点云之后建立的三维模型的细节轮廓清晰,表现特征直观反应了地物的真实结构状态,模型效果得到极大优化。同时,本次三维建模过程的人工参与度已经显著减少,建模效率大幅提高。

图8 三维场景模型效果Fig.8 The effect picture of 3D scene modeling
3 结论与讨论
将AC1200 微型无人机倾斜摄影系与HERON背包式三维激光扫描系统相结合,首先采用光束法平差和投影差优化算法原理借助Smart3D 工具软件对倾斜摄影获取的影像进行关键点提取、自动连接点匹配、密度匹配等一系列处理获得大量密集点云。采用背包式三维激光扫描系统对林冠下景观进行补充采集,获得三维激光扫描点云。运用ICP 算法对两种设备获取到的点云进行配准融合后,构建森林景区三维场景模型。通过对潭柘寺森林景区进行三维场景建模实验结果表明,点云配准整体误差小于2.37 mm,完全能满足森林景观三维场景建模精度要求。构建的三维模型有效解决了树木底部的模型漏洞和模糊不清等问题,模型细节轮廓清晰,直观反应了地物的真实结构。
该方法不仅节省了倾斜摄影的外业控制点采集过程,还有效补充了两种设备的缺点,实现了两种技术的优势互补,降低了森林景观三维建模的成本,提高了建模效率,对森林精准计测及精细化管理等具有一定实践意义。
1)虽然基于无人机倾斜摄影三维景观建模方法的成本低、效率高,但需依赖地面控制点平差来保证建模精度。而且利用倾斜摄影技术采集森林景观影像数据时,由于林冠下GPS 信号差、树冠间相互衔接密闭,难以找到地面控制点标记、无法设置控制点,导致无法保证倾斜摄影结果的精度。该方法利用背包式三维激光扫描仪采集地面点云,为无人机倾斜摄影提供了精确的地面控制点,节省了地面控制点采集过程,提高了建模效率。
2)无人机倾斜摄影系统借助搭载的多目相机从不同视角同步采集多视影像,获取到丰富的地物顶部及侧视的高分辨率纹理信息,三维模型感官真实性强。但无法获取林冠下的森林景观信息,无法保证场景模型的完整性。背包式三维激光扫描技术虽然无法获取完整的冠层信息,但可以完整准确的获取林冠下的景观信息。将两种技术相结合,实现两种技术的优势互补,降低了森林景观三维建模的成本,提高了场景模型的精度。
3)利用ICP 算法对两种点云进行配准融合后构建的三维模型细节轮廓清晰,近地面物体结构清楚,表现特征直观反应了物体的真实结构状态,有效解决了模型漏洞、模型局部拉花等问题,模型效果得到极大优化。
本研究对森林景观实景三维场景建模和无人机倾斜摄影技术的推广应用具有一定的参考价值。随着科技的发展,无人机倾斜摄影设备呈现更加灵活发展趋势,相信在不久的将来,森林景观三维场景建模技术会更加灵活便捷。由于受时间和实验条件的限制,文章仍然有很多不足和值得改进的地方,如三维场景模型分割等方面需要进一步研究与探索。