基于Kalman滤波与样本加权的压缩感知跟踪算法
2019-12-05于德鑫曹晓杰杨敏赵鹏德
于德鑫 曹晓杰 杨敏 赵鹏德


摘 要:针对压缩感知跟踪算法在目标移动过快时易丢失跟踪目标和跟踪准确性不高的缺点,提出了改进的压缩感知跟踪算法。该算法引入加权函数辅助判断正负样本,使用加权后的样本计算特征找到下一帧的目标中心位置,当目标移动过快时,使用卡尔曼滤波对当前帧目标位置进行预测。对不同测试序列的跟踪结果表明,改进后算法能够稳定跟踪目标,有效地解决了目标移动过快时易丢失跟踪目标的问题,并且具有较高的准确性。
关键词: 压缩感知;加权函数;卡尔曼;准确性
【Abstract】 Aiming at the shortcomings of the compressed sensing tracking algorithm, which was easy to lose the tracking target and has the low tracking accuracy when the target moved too fast, an improved compressed sensing tracking algorithm is proposed. The algorithm introduces a weighting function to assist in judging positive and negative samples, and uses the weighted sample to calculate features to find the target center position of the next frame. Kalman filter is used to predict the current frame target position when the target moved too fast. The tracking results of different test sequences show that the improved algorithm can stably track the target, effectively solve the problem that the target is easy to lose the tracking target when moving too fast, and obtains high accuracy.
【Key words】 compressive sensing; weighted function; Kalman; accuracy
0 引 言
目標跟踪技术是计算机视觉领域中最热门的研究课题之一[1-3],主要应用于安全监控、人机交互、智能车辆、军事、交通运输、医疗诊断等领域,具有重要的研究意义和应用价值。自二十一世纪以来,目标跟踪技术受到国内外广大研究学者的关注,并提出了大量的优秀算法,如TLD[4]、KCF[5]、MEEM[6]、HCF[7]、STRUCK[8]、MDNET[9]、MCPF[10]及LMCF[11]算法等,但是现如今在目标跟踪领域仍然有大量的难题,如何应对不断变化的光照、目标被遮挡问题、目标发生形变、尺度不断变化以及目标所处复杂环境等因素的影响,从而实现准确、稳定、实时的目标跟踪,这一系列问题是亟需解决的。
时下,立足于准确、稳定目标跟踪的研究,Zhang等人[12]将压缩感知引入到目标跟踪中,提出了一种基于压缩感知的跟踪算法(CT)。该跟踪算法首先依据压缩感知理论对图像样本特征进行降维,然后采用朴素贝叶斯分类器对降维后的特征进行分类。该算法虽然简单高效,但是在复杂环境下和目标快速移动时,容易跟丢目标,且跟踪准确性不好。
针对CT跟踪算法的不足,本文在CT跟踪算法框架下做出如下改进:在采集正负样本时,引入加权函数辅助判断正负样本,很大程度上提高了判断正负样本的正确率;当目标运动过快时,用卡尔曼滤波算法预测当前帧目标的位置,解决目标运动过快而导致的目标跟丢问题,并保证跟踪的准确性。
1 CT跟踪算法简介
1.1 CT跟踪算法特征提取
3 算法设计流程
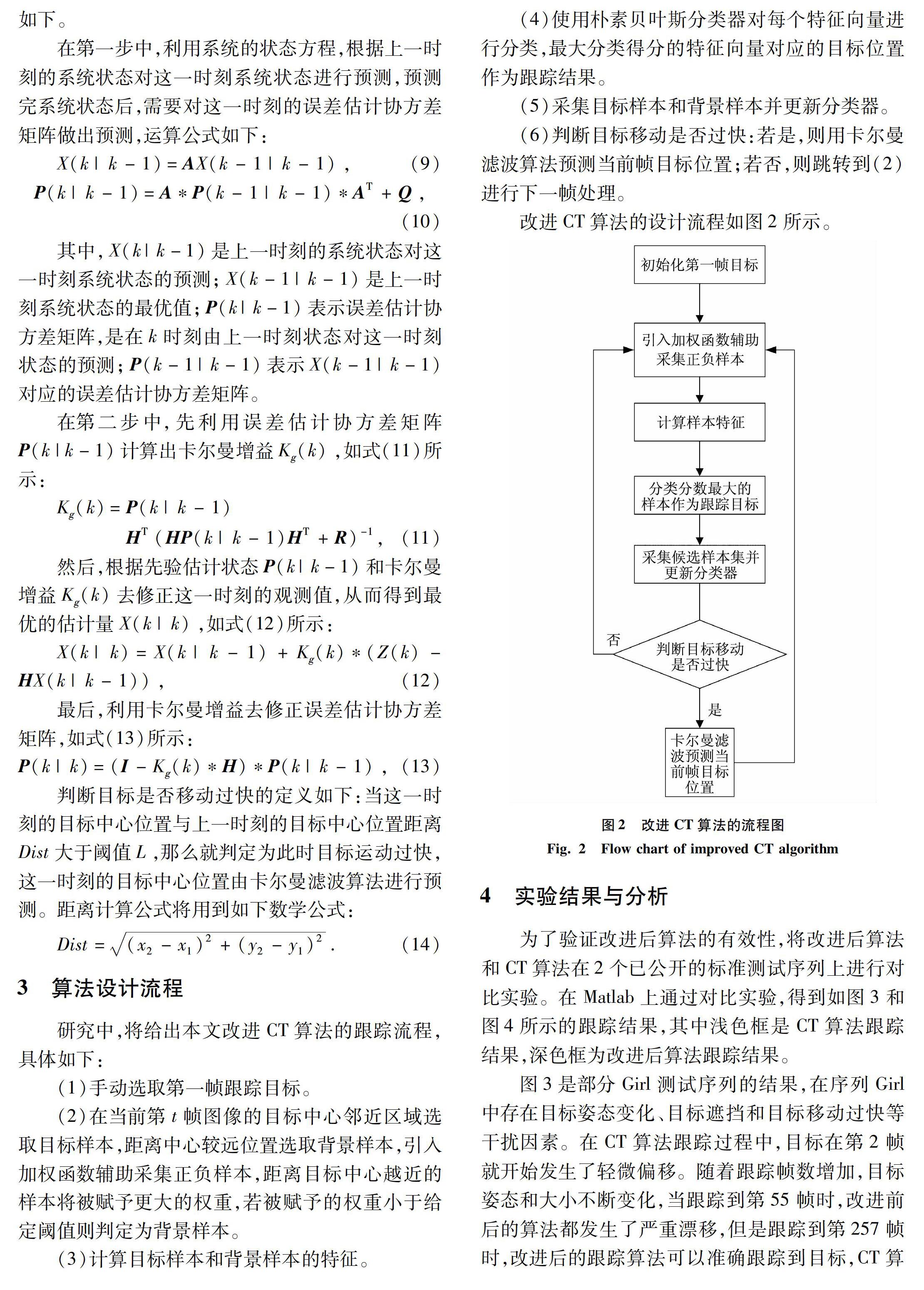
研究中,将给出本文改进CT算法的跟踪流程,具体如下:
(1)手动选取第一帧跟踪目标。
(2)在当前第t帧图像的目标中心邻近区域选取目标样本,距离中心较远位置选取背景样本,引入加权函数辅助采集正负样本,距离目标中心越近的样本将被赋予更大的权重,若被赋予的权重小于给定阈值则判定为背景样本。
(3)计算目标样本和背景样本的特征。
(4)使用朴素贝叶斯分类器对每个特征向量进行分类,最大分类得分的特征向量对应的目标位置作为跟踪结果。
(5)采集目标样本和背景样本并更新分类器。
(6)判断目标移动是否过快:若是,则用卡尔曼滤波算法预测当前帧目标位置;若否,则跳转到(2)进行下一帧处理。
改进CT算法的设计流程如图2所示。
4 实验结果与分析
为了验证改进后算法的有效性,将改进后算法和CT算法在2个已公开的标准测试序列上进行对比实验。在Matlab上通过对比实验,得到如图3和图4所示的跟踪结果,其中浅色框是CT算法跟踪结果,深色框为改进后算法跟踪结果。
图3是部分Girl测试序列的结果,在序列Girl中存在目标姿态变化、目标遮挡和目标移动过快等干扰因素。在CT算法跟踪过程中,目标在第2帧就开始发生了轻微偏移。随着跟踪帧数增加,目标姿态和大小不断变化,当跟踪到第55帧时,改进前后的算法都发生了严重漂移,但是跟踪到第257帧时,改进后的跟踪算法可以准确跟踪到目标,CT算法却仍然发生漂移,在第435帧时,目标出现遮挡情况,2种算法都没能很好地跟踪到目标。
图4是部分Basketball测试序列的结果,在序列Basketball中存在背景复杂、目标遮挡和目标移动过快等干扰因素。改进前后算法在前73帧中都能够稳定且准确地跟踪目标。由于目标姿态不断变化,目标移动加快,当跟踪到第172帧时,CT算法开始出现向上漂移的趋势。直到跟踪到第242帧时,CT算法出现严重漂移,改进后算法仍然可以准确跟踪目标。在第280帧出现与目标相似的背景时,CT算法严重跟踪漂移,出现跟踪错误目标的趋势,到第304帧时,CT算法出现跟丢目标情况,而改进后算法却始终稳定且准确地跟踪目标。
为定量评估本文算法的跟踪性能,本文基于中心位置误差(Center Location Error)评价指标对本文算法与原始CT跟踪算法进行定量的对比分析,中心位置误差主要是指跟踪所得目标框的中心与真实基准中心之间的欧式距离[16]。没有跟丢目标的前提下,在CT算法中,Girl序列平均中心位置误差为18.99像素,Basketball序列为23.03像素;在改进后的CT算法中,Girl序列为15.66像素,Basketball序列为9.69像素。为了能够更直观地分析2种算法的跟踪性能,图5和图6给出了改进前后算法在2个序列中心位置误差的对比图。
5 结束语
本文针对CT算法的缺点,提出了基于卡尔曼滤波与样本加权的压缩感知跟踪算法。在采集正负样本时,引入加权函数辅助判断正负样本,解决了CT算法常常把带有背景信息的样本判定为正样本的缺点,很大程度上提高了判断正负样本的正确率;当目标运动过快时,用卡尔曼滤波算法预测当前帧目标的位置,解决目标运动过快而导致目标跟丢的问题,并保证跟踪的准确性。从对比实验的评价结果来看,改进后算法能够有效跟踪目标,并且稳定性和准确性均有所提高。但改进后算法并不能很好解决目标遮挡因素的干扰,故下一步研究重点是如何克服目标遮挡问题。
参考文献
[1]卢湖川,李佩霞,王栋. 目标跟踪算法综述[J]. 模式识别与人工智能,2018,31(1):61-76.
[2]WU Yi,LIM J,YANG M H. Online object tracking:A benchmark[C]// IEEE Conference on Computer Vision and Pattern Recognition. Portland, OR, USA:IEEE,2013:2411-2418.
[3]管皓,薛向阳,安志勇. 在线单目标视频跟踪算法综述[J].小型微型计算机系统,2017,38(1):147-153.
[4]KALAL Z,MIKOLAJCZYK K,MATAS J. Tracking-learning-detection[J]. 2013 IEEE Transactions on Pattern Analysis and Machine Intelligence,2012,34(7):1409-1422.
[5]HENRIQUES J F,CASEIRO R,MARTINS P,et al. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2015,37(3):583-596.
[6]ZHANG Jianming,MA Shugao,SCLAROFF S. Meem:robust tracking via multiple experts using entropy minimization[C]// PAJDLA D, PAJDLA T, SCHIELE B, et al. Computer Vision-ECCV 2014. ECCV 2014. Lecture Notes in Computer Science. Cham:Springer, 2014,8694:188-203.
[7]MA Chao,HUANG Jiabin,YANG Xiaokang,et al. Hierarchical convolutional features for visual tracking[C]// IEEE International Conference on Computer Vision.Santiago,Chile:IEEE,2015:3074-3082.
[8]HARE S,GOLODETZ S,SAFFARI A,et al. Struck:Structured output tracking with kernels[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2016,38(10):2096-2109.
[9]NAM H,HAN B. Learning multi-domain convolutional neural networks for visual tracking[C]// IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, Nevada, USA:IEEE,2016:4293-4302.
[10]ZHANG Tianzhu,XU Changsheng,YANG M H. Multi-task correlation particle filter for robust object tracking[C]// 2017.IEEE Conference on Computer Vision & Pattern Recognition.Honolulu, HI, USA:IEEE,2017:4819-4827.
[11]WANG Mengmeng,LIU Yong,HUANG Zeyi. Large margin object tracking with circulant feature maps[C]// IEEE Conference on Computer Vision and Pattern Recognition.Honolulu,HI:IEEE,2017:4021-4029
[12]ZHANG K H,ZHANG L,YANG M H. Real-time compressive tracking[C]//Proceedings of the 12th European Conference on Computer Vision. Florence, Italy:IEEE,2012,7574 (1):864-877.
[13]張新堃,黄山. 结合Kalman滤波的时空上下文目标跟踪算法[J]. 电光与控制,2018,25(11):102-105,119.
[14]张伟丽,江春华,郝宗波. 基于改进的均值漂移和卡尔曼滤波的目标跟踪算法[J]. 计算机应用与软件,2014,31(5):240-243.
[15]赵广辉,卓松,徐晓龙. 基于卡尔曼滤波的多目标跟踪方法[J].计算机科学,2018,45(8):253-257,276.
[16]徐建强,陆耀. 一种基于加权时空上下文的鲁棒视觉跟踪算法[J].自动化学报,2015,41(11):1901-1912.
