基于Sentinel-2数据的水稻面积提取方法比较分析
2019-12-04麦丽素乌兰吐雅
麦丽素,乌兰吐雅
(1.山东农业大学 资源与环境学院,山东 泰安 271000;2.内蒙古自治区农牧业科学院,内蒙古 呼和浩特 010031)
水稻是世界主要粮食作物之一,而我国是世界上最大的稻米生产国和消费国。据国家统计局年鉴2017年,我国水稻播种面积为3 017.60 万hm2,占全国粮食作物播种面积的26%;水稻产量为21 267.59 万t,占全国粮食总产量的32%。近年来,由于世界人口的快速增长和全球变暖的影响,水稻产量需求大大提高,水稻种植区域由原来的低纬度地带逐渐向中高纬度扩展,内蒙古统计局年鉴从2002—2017年的15年内,内蒙古水稻产量由每年生产55.99 万t 增长到85.2 万t,增长率为52.17%。面对我国中高纬度单季稻种植区域的高速扩张和产量迅猛增加的现状,必须快速精准地获得水稻空间分布及种植面积信息,为我国各级政府指导水稻生产、平衡区域供需提供重要依据。
近年来,新型遥感传感器向着长时间、高分辨率、高光谱的方向不断发展,极大地提高了水稻遥感监测的精度和效率,遥感技术手段已成为获取水稻种植面积的重要技术手段[1]。目前,国内外通过遥感手段对水稻面积的提取研究多集中于低纬度双季稻地区。许玉萍等[2]以长江中下游汉江平原为研究区域,建立NDVI 时序曲线形状相似性模型提取水稻面积。CHEN 等[3]通过NDVI 时序数据使用线性混合模型对湄公河三角洲及越南的水稻耕作强度进行监测。
目前,常用的研究水稻面积提取的光学遥感图像由中分辨率遥感卫星Landsat TM/ETM+、SPOT、CBERS-1 提供。中分辨率影像其特征为覆盖范围广、时间分辨率高、卫星类型多,可以满足水稻种植监测大范围、多时相的特点。全璟等[4]利用Landsat 8卫星数据采用非监督分类方法提取大别山区水稻种植面积;朱晓禧等[5]利用1988年和1998年Landsat TM影像,获取了黑龙江省西部地区的水稻和玉米种植图;OKAMOTO[6]基于TM 数据,以像元为单位,建立应用模型,提取面积精度达97%以上。本次研究采用欧洲航天局发射的Sentinel-2 卫星作为数据源。Sentinel-2 卫星携带一枚多光谱成像仪(MSI),高度为786 km,可覆盖13 个光谱波段,幅宽达290 km。地面分辨率分别为10,20,60 m,1 颗卫星的重访周期为10 d,2 颗互补,重访周期为5 d。从可见光和近红外到短波红外,具有不同的空间分辨率,在光学数据中,Sentinel-2 卫星数据是唯一一个在红边范围含有3 个波段的遥感数据,这对监测植被健康信息非常有效。在近几年的研究中,Sentinel-2 卫星遥感数据在作物分类和面积提取方面较少被使用,可以免费获取且具有经济实用性的Sentinel 卫星数据,在未来定会成为实现大范围水稻种植监测的常用数据源[7]。
相比传统的水稻面积提取,遥感影像通过专业软件的处理可以快速、有效、准确地获取研究区的水稻种植面积。在众多的自动分类方法中,选取哪种分类方法得到更高精度的水稻面积一直是国内外学者的研究重点。许丽杰等[8]采用平行六面体、最小距离分类、最大似然分类等不同分类方法对同一研究区进行分类,分类后结果采用混淆矩阵进行精度评价。陈玲[9]以山西省大同市浑源县为对象,采用最小距离分类、最大似然分类以及人机交互分类的方法进行土地利用分类的精度对比分析。本研究以水稻集中种植的乌兰浩特市为研究区,使用Sentinel-2 卫星数据源基于提取水稻种植区域研究中常用的支持向量机法、最大似然法、面向对象分类法,结合单时相影像得到水稻的种植面积,通过混淆矩阵、地面样方验证的精度评价手段对分类结果进行比较分析,旨在得到适合中高纬度水稻种植面积自动化提取的最佳分类方法,从而为我国中高纬度地区水稻种植管理、预测水稻产量、监测水稻动态变化提供参考[10]。
1 研究区概况
乌兰浩特市位于内蒙古自治区东北部,兴安盟东南部,介于北纬45°22′~46°18′,东经121°51′~122°20′,地处大兴安岭山脉的中段与松辽平原过渡地带,属低山丘陵地貌,平均海拔263.6 m,总面积为865 km2。该区域属中温带半干旱季风气候,四季分明,气温的年较差和日较差都较大,年平均气温5.0 ℃,年平均降水量442.6 mm,年平均日照2 875.8 h,无霜期134 d。
2 数据与方法
2.1 数据来源及预处理
本研究获取了2018年覆盖乌兰浩特地区的2 景Sentinel-2 Level-1C 产品图像,获取时间为9月9日。根据皮艳萍[11]有关乌兰浩特市水稻的物候期(表1)以及遥感影像的云覆盖状况,本研究选取是处于水稻乳熟期的遥感影像。影像投影方式为UTM,坐标系统为WGS84。
欧空局(ESA)发布的Sentinel-2 Level-1C 级数据是经过几何精校正的正射影像,下载后的影像通过Sen2cor 工具进行了大气校正,然后对图像进行镶嵌处理,通过乌兰浩特市的矢量边界线裁剪得到研究区域的影像,选取了B4、B3、B2 波段进行波段合成。将对影像进行目视解译后得到的结果(2/3 作为解译标志,1/3 作为精度验证)作为对比依据,进一步利用3 种分类方法提取水稻种植区域的数据。

表1 乌兰浩特市水稻的物候期
2.2 训练样本选取与可分离性判断
在进行支持向量机法和最大似然法分类前,从目视解译得到的分类结果中随机选取其中的2/3 作为解译标志,创建感兴趣区域(ROI)训练样本。由于本研究的目的主要是提取水稻面积,所以将水稻以外的其他作物、建设用地、水体、裸地等归为一类即非水稻用地,然后用Jeffries-Matusita 和转换分离度(Transformed divergence)对训练样本的可分离性进行检验,计算后的值在0~2,数值越大说明可分离性越好。由表2可知,本次选取的训练样本可分离性指标>1.85,分类性符合标准,可以使用。
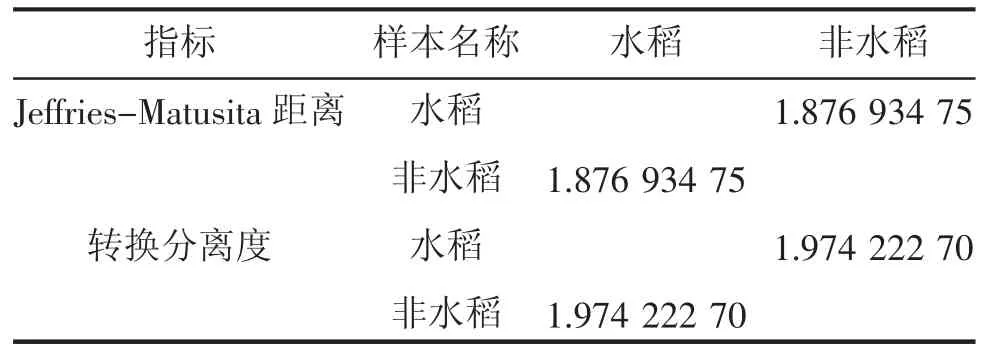
表2 训练样本的可分离性检验结果
2.3 基于地面验证的水稻验证样方的选择
本研究为了进一步对水稻面积提取精度进行评价,采用地面样方数据验证方法,在乌兰浩特市水稻种植区域目视解译结果中随机选取5 个样方(图1)作为实际水稻面积,通过3 种分类方法提取的水稻种植区域结果中选择相同位置大小的区域(图2),并计算区域内部的水稻面积,以此进行水稻面积的精度验证。
2.4 研究方法
本研究主要采用监督分类方法中的支持向量机法和最大似然法及面向对象分类法的K 近邻法(KNN)分别对2018年覆盖乌兰浩特市的单时相Sentinel-2 卫星遥感图像进行水稻种植区域提取,分类结果为水稻用地、非水稻用地2 种地物类型,并对3 种分类方法的结果进行分类后处理(Majority 分析法、聚类处理),以此消除分类过程中的“椒盐”现象。通过对3 种分类方法的结果对比分析找到基于Sentinel-2 卫星影像的水稻提取最佳分类算法,具体技术流程见图3。
2.4.1 支持向量机法 支持向量机分类(SVM)是一种建立在统计学理论(Statistical learning theory,SLT)基础上的机器学习方法。其基本思想是通过非线性函数将输入的空间变换到高维特征空间,在变换后的空间中求取最优线性分类面,保证最小的分类错误率,解决空间中线性不可分的问题。该方法是根据有限的样本信息在模型的复杂性(对特点训练样本的学习精度)和学习能力(无错误地识别任意样本的能力)之间寻求最佳折中,以期获得最好的推广能力。单捷等[12]运用SVM 分类法、CART 决策树法和最大似然法进行分类提取水稻面积,结果表明,支持向量机法精度最高,为80.38%,Kappa 系数为0.74。邬明权等[13]将不同影像数据进行空间融合,基于SVM分类法获取水稻面积,获得的分类精度高达93.00%。在水稻种植面积提取研究中,SVM 分类法较为常用,且提取精度较高。

图1 样方分布

图2 3 种分类方法水稻面积提取效果对比

图3 技术流程
2.4.2 最大似然法 最大似然分类法也是监督分类方法里面用得较多的一种分类方法。它将遥感影像多波段数据的分布作为正态分布来构造判别分类函数,其基本思想是将各类已知像元的数据在平面或空间中构成一定的点群;每一类的每一维数据都在自己的数轴上形成一个正态分布,该类的多维数据就构成一个多维正态分布;各类的多维正态分布模型在位置、形态、密集或分散程度等方面不同。根据训练样本就可以构造出各类的多维正态模型,对于未知类别的数据向量,通过贝叶斯公式计算它属于各个类别的概率大小,比较这些概率后,将数据向量或像元进行归类。单捷等[14]通过Radarsat-2 卫星影像数据,采用支持向量机法和最大似然法对江苏省盐城市水稻面积提取并进行精度评价。
2.4.3 面向对象分类法 面向对象分类法在进行水稻面积提取时进行处理的最小单元与监督分类不同,该分类法不是以像元为最小单元,而是以集合邻近像元为单元。该方法不同于传统的只基于光谱的分类方法,它结合了几何信息与结构信息,使得分割后形成多个互不交叠的区域,减少了“椒盐”现象,一定程度上解决了“同物异谱”和“同谱异物”现象,适合于中高分辨率多光谱和全色影像。陈燕丽等[15]利用多光谱数据,应用面向对象分类法提取了广西玉林市晚稻种植面积,总计精度可达96.31%。汤传勇等[16]利用面向对象分类法基于SPOT4 遥感数据提取广西玉林市水稻面积,精度达95.40%。
在采用面向对象分类法进行研究区水稻面积提取时,初期对影像进行尺度分割的分割尺度对于分类结果精度有着重要影响,本研究通过多次尝试选取了分割尺度参数分割值、合并值,其值分别为60 和80;然后输入训练样本,基于K 近邻法实现整个分类过程,最后对提取图像进行分类后处理及精度验证[17]。
3 结果与分析
3.1 水稻分布信息及精度检验
图4为基于支持向量机法、最大似然法以及面向对象分类法对乌兰浩特市水稻单时相影像的空间分布进行提取的结果。由图4可知,支持向量机法与最大似然法提取区域较为松散,可以较清晰地分辨出分布在水稻种植区域内部的道路及建筑用地,但与其他作物种植区域和城市用地的边界比较模糊;而面向对象分类法因为影像分割尺度的选择,虽能明显辨别出水稻种植区域与非水稻种植区域的界线,但内部旱地和水稻区域发生混分现象。在区域南部的水稻种植区因被云层覆盖,提取结果也多为分散的块状区域,从目视判断结果来看,最大似然法对这一区域的分类结果较其他两种分类法所得到的结果更为精准。
3.1.1 基于混淆矩阵的精度评价 为了比较3 种分类方法对水稻种植区域提取的准确度,研究基于混淆矩阵进行分类精度评价,该方法是目前普遍使用的分类精度检验方法[18-19]。通过对研究区域的目视解译结果随机取样,在水稻种植区域随机生成200 个样方作为精度验证样本,最后所得到的分类精度见表3。由表3可知,最大似然法分类结果精度最佳,总体分类精度达89.35%,Kappa 系数为0.787 3,错分误差为0,漏分误差为16.81%,用户精度为100%;面向对象分类法分类精度最低,总体分类精度为76.90%,Kappa 系数为0.560 2,错分误差为0.34%,漏分误差为36.25%,用户精度为99.66%。
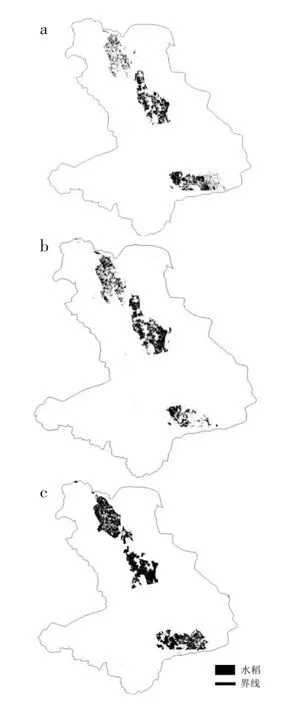
图4 基于3 种不同分类方法的水稻空间分布

表3 基于混淆矩阵的水稻面积遥感识别精度
3.1.2 基于地面样方数据的精度评价 基于地面样方数据验证也是精度验证的主要手段之一[20]。本研究只针对Sentinel-2 号卫星影像对水稻的识别能力,评价3 种不同分类方法在水稻面积监测中的精度,所以只以水稻区域进行精度评价,而不涉及非水稻区域。
在目视解译得到的水稻种植区域中随机选取了5 个样方点,与3 种分类结果分别得到的水稻提取区域中相应的样方区域进行面积提取的精度验证,得到基于Sentinel-2 卫星影像上对应的每块样方内水稻种植面积监测精度Pi和水稻种植面积监测平均精度,其结果见表4。

式中:yi为影像目视解译得到的样方内水稻面积,为通过自动化分类方法提取到的样方内水稻面积,n 为样方数。
由表4可知,支持向量机法、面向对象分类法的水稻种植面积监测平均精度分别为77.01%和73.30%,相差较小;最大似然法分类平均精度最高,为85.91%。

表4 基于地面样方数据的水稻面积监测精度评价结果
4 结论与讨论
以Sentinel-2 卫星为数据源,进行3 种不同分类方法的水稻面积提取,并对提取的水稻面积进行精度评价,得出以下结论:
通过比对目视解译结果与3 种分类方法得到的结果,3 种分类方法提取的水稻种植面积都小于90.00%,主要原因是在乌兰浩特市水稻乳熟期的8月下旬到9月下旬这一时间段,研究区域处于雨季,云层干扰严重,通过比对研究区域这一时间段所有影像云覆盖状况,最终选取了9月9日的Sentinel-2 卫星影像,但通过影像目视解译结果发现,从9月上旬开始,研究区域从北部开始陆续收割水稻,北部水稻种植区域多为旱地与水稻种植区域的混合,所以导致提取结果多为分散不规则的块状和点状区域,大大降低了水稻提取的精度。同时,在区域南部的水稻种植区域,有薄云覆盖,通过目视解译也很难区分水稻与其他作物种植区域的界线,这也降低了分类后的水稻面积提取的准确性。
本研究发现,在对高纬度单季稻地区进行水稻面积提取时,基于混淆矩阵精度评价中最大似然法与支持向量机法、面向对象分类法相比较,总体分类精度分别高4.60,12.45 个百分点,表明这3 种分类方法中最大似然法的水稻提取精度是最好的。这与其他分类方法精度比较的研究中所得出的面向对象分类法较监督分类方法精度更高的结论不同,主要原因是该研究区域处于水稻收割期,水稻生长区域多为旱地与水稻的混合地物,提取的水稻多为破碎地块[21]。农作物种植田块越破碎,面积估算会呈现增大的趋势,遥感分类精度降低[22]。最大似然法是以单独像元为识别单元,可以很好地识别破碎面积;支持向量机法可以自动寻找在间隔区边缘的训练样本点,从而区分有较大区分能力的支持向量,可以将类与类之间的间隔最大化[23]。而面向对象分类法突破以单个像元为识别单元的局限,以大面积分割后的地块为基本单元,避免了“异物同谱和同谱异物”“椒盐”现象,分类后得到的结果可以很好地辨认水稻集中种植区域的界线,但并不适合正在进行收割的水稻区域面积提取。如果在后续研究中建立自动化最优尺度分割算法,在分类初期很好的选取最佳分割尺度参数分割值、合并值,或者建立分层,将地物逐层进行分割,面向对象分类法的精度还能得到极大改善[17]。
面向对象分类法可以运用地物的光谱信息统计特征,有效利用图像中的形状、大小、纹理、相邻因素信息等,通过定义分类规则提高了自动化程度,相比监督分类方法可以节省大量时间和人力,后续研究中将对面向对象分类法的规则定义做进一步的分析研究,分类精度也会大幅度提高,在未来的研究中相比单纯以像元为单位的监督分类来说,面向对象分类法更具有优势性。
Sentinel-2 卫星影像在水稻种植面积的提取数据源中以其空间分辨率高、时间分辨率高、成本低、处理方便的特点,可以作为未来水稻种植面积提取研究中优选的数据源。通过该卫星影像能够准确地获取小尺度水稻种植面积,实现各地农业生产管理部门快速获取农情信息、准确预测水稻产量、随时监测水稻生长情况。
本研究是对单时相影像使用不同分类方法进行水稻面积提取,由于该研究区获取的影像受云覆盖影响,很难得到无云并处于水稻识别最佳时相的高质量影像,若是在以后研究中进行云掩膜处理或将更高分辨率的其他数据作为辅助信息,可以更好地提高水稻种植分布精度,细化提取结果。所以,提高云和阴影的检测精度、综合利用多时相遥感影像,对不同时期的水稻光谱信息进行综合分析将是下一步研究的重点,如何提高分类精度将是未来农作物提取分类研究的重点和趋势[24]。
在基于遥感技术的水稻种植面积自动提取中,虽然尽量对分类结果进行自动化优化处理,但不可避免还有错分、漏分,导致分类结果不准确。所以,结合人工干预来进行自动化处理,也可以大幅度提高分类的精度[25]。本研究中导致水稻分类的不准确,很大程度是由于收割期的研究区域处于旱地和水稻的混合地物,由于湿地和处于浇灌期或雨水期的旱地与水稻田的光谱特征相似,导致水稻分类的错分和漏分。因此,选择关键物候期并在水稻收割前获取影像对于提高水稻面积提取精度的研究有很大帮助。本研究主要探讨在中高纬度水稻种植区域内利用3种常用的分类方法获取水稻种植面积并进行精度的对比分析,研究的下一步会针对多时相遥感数据的融合,结合时序植被指数,找出适合中高纬度地区分类方法的参数选择,进一步提高水稻种植面积提取的精确度。
