无人机航测在风景园林中的应用研究
2019-12-03韩炜杰王一岚郭巍
韩炜杰 王一岚 郭巍
随着信息技术的高速发展,未来世界越来越趋向数字化和信息化,数字技术的运用开始逐渐深入到风景园林学科行业的各个环节。虽然相较建筑、规划等领域,风景园林数字化技术的应用相对滞后,但作为“智慧城市”的一部分,风景园林终将融入整个智慧系统,成为“智慧园林”[1]。场地高程数据、空间数据、遥感影像等数据的获取与分析作为风景园林规划设计与研究工作的第一个环节,是后面所有工作的基础,准确获取场地数据对风景园林师来说至关重要。
1 无人机航测发展历程
航测是航空遥感技术中的一种,在测绘行业中是获取高程、空间坐标等地理信息数据的重要方法[2]。其原理是通过对航拍像片的分析和运算恢复地面的光学模型,进而测定地面点的高程与坐标,主要包括航空摄影、外业控制、空三加密及内业测图等步骤[3]。早期的航测主要依靠飞机航拍,从飞行计划下达到成图有时需要2~3年,启动成本高、周期长、工序复杂。1993年,德国人Schwarz[4]首次提出IMU/DGPS辅助航空摄影测量技术,大大降低了航测的难度;同时,遥感技术的快速发展也打破了传统航测局限于测绘地形图的局面,开始面向多传感器发展。但传统的飞机航测依然存在成本高、周期长、云层影响大等问题。与载人飞机相比,无人机虽然飞行速度较慢、航程短,但飞行成本非常低,成果更新快,比较适合小范围航测,也适应现代社会的高速发展。
对无人机在各自领域的应用,前人已经做过不同的综述,如董娇娇等[5]对无人机在城市规划中应用的综述;张志明等[6]对无人机在景观生态学上应用的综述;刘昌军等[7]对无人机在水利行业上的应用综述;汤明文等[8]对无人机在电力行业上的应用综述;Zecha等[9]对无人机在农业上的应用综述等。无人机在风景园林行业上的应用,目前在国内外都还没有人进行过系统的研究,虽然越来越多的景观公司和设计师都开始使用无人机,但大多数的应用还停留在基础的航拍层面,对于应用潜力更大的航测层面,风景园林行业的应用相对较少,更鲜为人知。结合自身的实践经验,对无人机航测在风景园林上的应用进行介绍和总结。
2 无人机航测与遥感系统
无人机遥感系统(Unmanned Aerial Vehicle Remote Sensing System,简称UAVRSS)是一种以无人机为飞行平台,以各种成像与非成像传感器为主要载荷,飞行高度一般在几千米以内,能够快速获取和处理遥感影像数据的航空遥感与摄影测量系统[10]505。目前,成熟完备的民用无人机遥感系统主要由飞行平台系统、对地观测传感器系统、飞行控制系统和影像处理系统4部分组成。
2.1 常见飞行平台分类
当前市场上的民用无人飞行器种类繁多且没有统一的分类标准,从动力、用途、结构、航程和飞行器重量等方面均可划分为多种类型。例如,按飞行原理和结构可分为固定翼、旋翼、无人直升机;按飞行器重量可以分为微型、小型、中型和大型[10]506;在风景园林行业中最常用的是小型多旋翼无人机,这种无人机最大的特点是能够实现目标悬停,适用于中小尺度场地数据的采集;其次是小型固定翼无人机,其航程一般在几千米以内,飞行速度比旋翼无人机更快,飞行时间也更长,适用于尺度稍大的场地信息获取。
2.2 常见传感器类型
无人机作为一个新的飞行平台,能通过与不同类型的传感器组合,满足各个行业不同任务的需要,达到非常便捷实用的观测效果。由于市场上常见的民用无人机航测一般都使用小型无人机作为飞行平台,荷载较小,因此搭载的传感器多为小型传感器,如普通的非量测数码相机、小型机载激光雷达、小型多光谱影像仪、高光谱影像仪和热成像仪等。
2.3 常见飞行控制类型
无人机飞行控制系统由机载和地面2部分构成,按控制方式可分为无线电遥控、预编程自主控制和编程与遥控复合控制3种[10]507。航测需要飞机在固定的海拔高度水平飞行,针对被测区域来回“U”型航线飞行,前后照片必须保证一定的重叠率,相邻航线照片也需保证一定的重叠率。因此,现在执行航测任务的无人机一般都属于复合控制型,通过遥控控制起飞与降落以适应复杂的工作环境,通过编程设置航线以满足精确的测量要求。目前,有一些辅助航线规划软件如Pix4D capture、Altizure等,可以下载在手机、平板电脑等终端,连接无人机对拍摄正射影像或倾斜摄影进行专门的航线规划,使没有编程基础的人也能实现预编程自主控制,完成原本复杂的航测任务。
2.4 常见影像处理软件
目前市场上常见的商用无人机影像快速处理软件包括:Bentley Context Capture(Smart 3D)、Pix4Dmapper、ERDAS-LPS、Agisoft Photoscan、Altizure、ENVI等,还有许多研究机构和企业拥有自主研发的影像处理软件供内部使用。这些软件都能半自动或全自动完成影像处理,产出DEM、DSM、DOM及三维实景模型等成果。相较而言Smart 3D的三维效果更加逼真;Pix4Dmapper产出DOM正射影像更为快速、准确;ERDAS、ENVI多用于处理多种传感器的遥感影像。
3 无人机航测在风景园林中的应用
无人机在风景园林领域中的应用大体上可以分为航拍和航测2个方面。航拍是无人机最简单也最常见的应用方式,主要是使用消费级的小型多旋翼无人机拍摄普通的照片和视频,不用进行遥感影像处理。而航测相对航拍而言更为复杂,是更具难度的应用方式,其操作相对复杂,入门难度较大,涉及测量学、遥感、地理信息系统等多学科的知识和技术。常见的应用主要集中在传统航测、倾斜摄影、多种传感器遥感等3个方面,产出的数字化成果包括:数字高程模型(Digital Elevation Model,简称DEM)、数字地表模型(Digital Surface Model,简称DSM)、数字正射影像图(Digital Orthophoto Map,简称DOM)、数字线划地图(Digital Line Graphic,简称DLG)、三维实景模型和特殊影像图等(图1)。
3.1 传统航测在风景园林中的应用
传统的无人机航测以获得正射影像为目的,采用像片倾角小于2~3°的摄影方式,称为竖直航空摄影。传统无人机正射影像图是利用DEM对航片或遥感影像进行微分纠正、镶嵌、裁剪生成的影像数据(真正射影像包含地表地物,使用DSM进行微分纠正),影像上有坐标、方位及尺寸等信息,可直接测量距离及面积,是一种同时具有地图的几何精度和影像特征的图像。因此,涉及定量的研究或者数据采集都必须要基于正射影像。由于专业的量测相机质量较大且价格昂贵,一般用于载人飞机航测,大多数无人机航测使用的是非量测数码相机,镜头存在较大的畸变差[11],其拍摄影像需要在进行空三运算前进行畸变差校正。
普通的航测只需要普通的数码相机就足够了,测量高程等空间数据是通过空中三角测量的方法,不需要使用激光雷达等更高级的传感器亦可完成。目前,市场上有一些专门针对无人机拍摄的遥感影像进行处理的软件,如Smart 3D、Pix4Dmapper、Photoscan等。这些软件的影像处理流程大同小异,处理流程大体上可分为:数据准备、畸变差改正、空三运算、制作DEM或DSM、正射纠正、镶嵌、裁剪等,最后生成DOM(图2)。经过影像处理软件对无人机拍摄的影像进行处理,可以生成DEM、DSM、DOM等数字化成果。由DEM数据生成的地形等高线[12]是风景园林规划设计的重要依据,被广泛应用于规划设计的前期分析中,径流分析、视线分析、地形分析等都必须依赖DEM数据,其应用方式和重要程度不再赘述。DSM是在DEM的基础上,包含地表建筑、树木等高度的高程模型,主要应用于一些需要测定建筑、树木等地表覆盖物高度的领域。
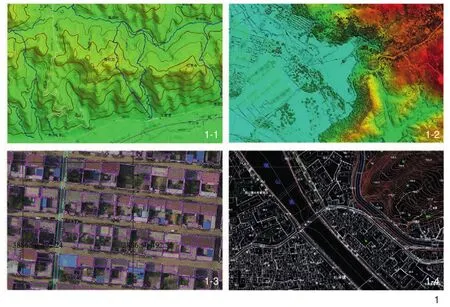
1 数字化成果Digital products1-1 数字高程模型DEM1-2 数字地表模型DSM1-3 数字正射影像图DOM1-4 数字线划地图DLG
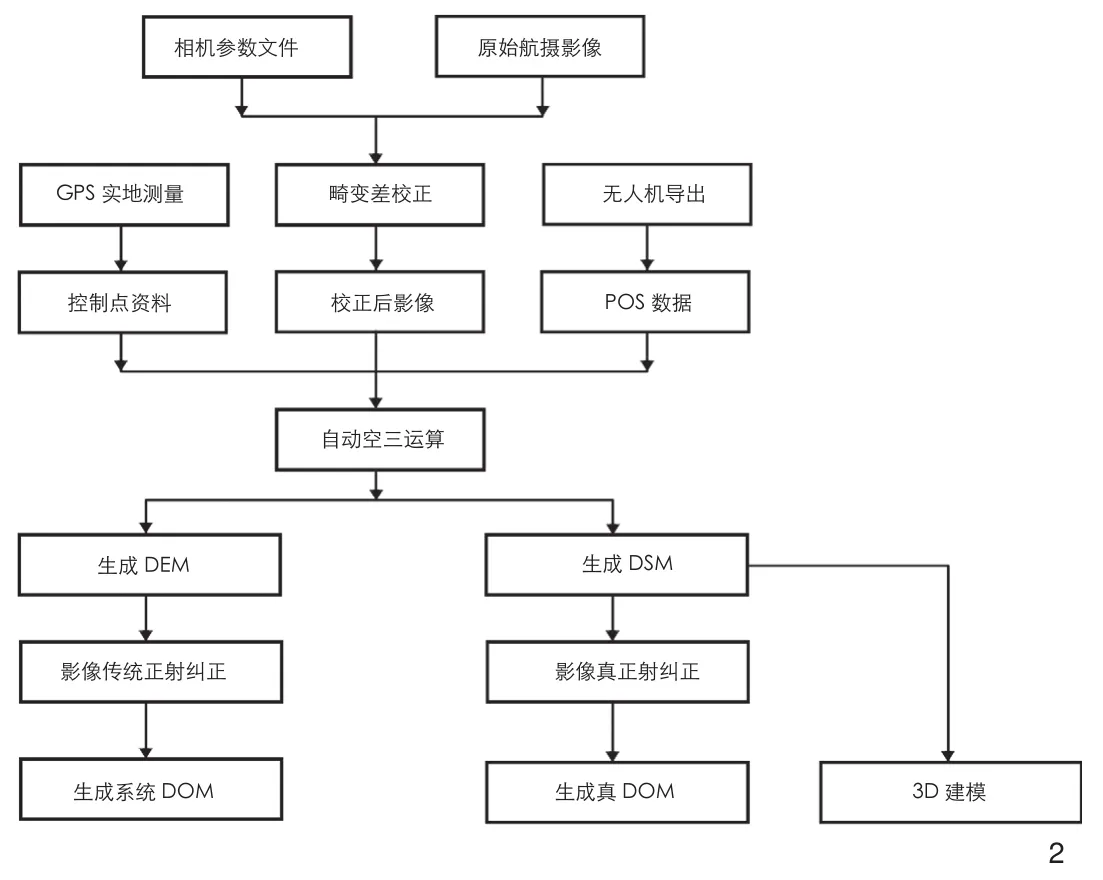
2 无人机影像处理流程UAV image processing
无人机DOM最大的特点就是不再受传统卫星图或航片空间分辨率的限制,以厘米级的超高分辨率和准确的尺寸信息满足风景园林师对场地分析和研究需求。通过无人机航测的DOM可以准确地对现状用地进行分析[13],甚至可以在一定程度上实现对植物物种的识别[14-18]。北京林业大学测绘与3S技术中心进行了许多使用无人机航测进行地表地物识别、林业调查等方面的应用研究,依靠无人机航测获取数据可以大大减少传统调研方法的成本和工作量。如樊江川[19]在北京西北部苏家坨镇鹫峰林场使用无人机获取的影像数据结合影像处理软件ENVI5.0,通过直接判读和计算的方法获取了森林的各项特征参数,包括冠幅、树高、郁闭度等。王彬等[20]利用无人机航测获取雪松林的DSM,再通过点云分类提取非植物类点生成数字地面模型(Digital Terrain Model,简称DTM),通过将DSM和DTM叠加相减得到研究区雪松高度模型,再经过与激光测距仪测定的雪松高度比较进行精度检验,发现依靠无人机航测测得的树高精度在0.9以上。杨龙等[17]利用搭载数码相机的无人机对亚热带地区森林进行林冠物种识别,发现在超低空(50 m)飞行时拍摄的影像能识别出近20种冠层物种,甚至能识别部分林下物种;Zweig等[18]利用无人机获取的DOM成功地对湿地中的植物进行了识别,并据此完成了植被分类制图。陈荻等[21]以无人机获取的高分辨率的DOM影像为基础,提取了树木的位置和冠幅,然后利用三维树形树冠体积公式计算单株树的三维绿量,实现对三维绿量的定量分析。梁婷等[22]根据无人机获取的DOM,结合B-IBI底栖动物完整性指数,对辽河保护区上游河流生态系统进行了评价。
除此之外,无人机传统航测由于其便捷性和时效性,在设计施工管理上也有一定的应用,最经典也最常见的用法是叠加。通过叠加对比施工现场DEM和设计的DEM可以更精确地反映竖向设计与实际施工上的差异;叠加施工现场实时的DOM和施工总平面图可以检查施工上的错误(图3),建筑施工方可以提早发现放线上的错误及时止损,景观施工方可以依据此图对施工进行适当调整进而使其更贴合设计,提高最后成景的质量。除以上应用外,DOM还是绘制数字线划图DLG的基础,DLG常以GIS或CAD等软件作为呈现和编辑平台,也是城市规划、风景园林等行业拿到的常见基础资料(现状CAD底图)之一,其重要程度不再赘述。
3.2 倾斜摄影在风景园林中的应用
无人机倾斜摄影技术是当前新兴发展的一项航测技术,这种技术在规划设计领域中主要用于生成三维实景模型。中国第一次引进该技术是在2010年,现已成为当前航测的研究热点[23],它改变了传统航测只能从垂直方向拍摄的局限性,其实质是在同一飞行平台上搭载多个传感器,同时从垂直、倾斜多个角度对地物进行拍摄,获取多个方位上地物的影像及位置信息以便三维建模[24](图4)。如果说正射影像是带有平面坐标和尺寸的平面测量图,那三维实景模型就是带有空间坐标和尺寸的立体测量模型。数字化的三维建模是数字城市技术研究的重点之一,已有许多人将这一技术用于风景园林建模的具体实践中进行过研究[25-26],目前这个技术已经商业化,现在多数无人机三维建模任务都由专门的无人机公司来完成。

3 施工现场DOM 与施工平面叠加对比图Overlay of the construction DOM and the construction plan

4 倾斜摄影原理The principle of oblique photogrammetry
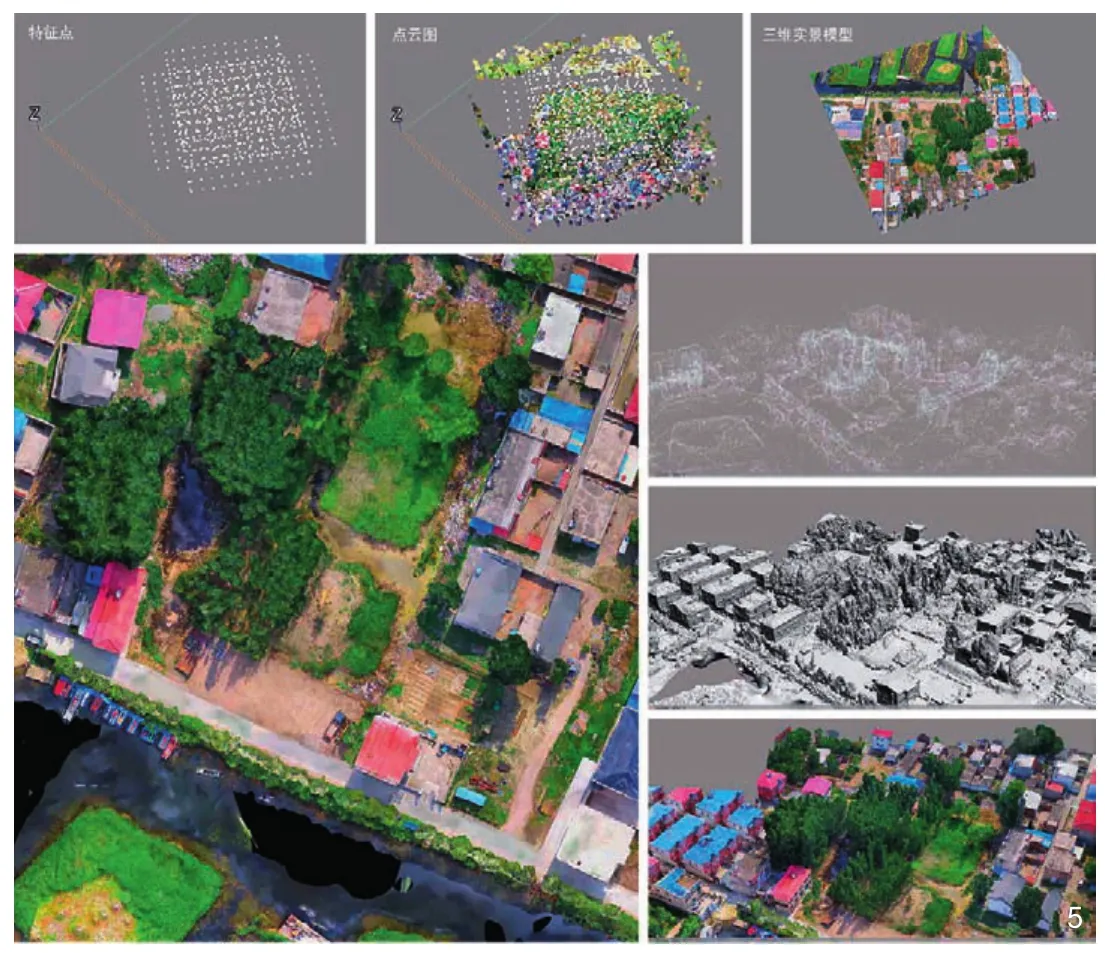
5 无人机航测三维实景模型生成过程Generation process of UAV real-time 3D model
建立精确度较高的实景三维模型需要多镜头的数码相机,单镜头相机虽也能通过环绕拍摄完成倾斜摄影,但工作量较大、精确度较低。一般来说,镜头数量越多,模型精确度越高。市场上常见的是五镜头数码相机,中间的镜头垂直向下拍摄可以获取DOM正射影像,四周的镜头则分别从4个方向进行拍摄获取多角度的地面影像,这种多镜头的数码相机通过一次航飞任务便可获取正射影像和倾斜影像等多种数据,效率较高;搭载这种质量较大的多镜头相机也对飞行平台的稳定性和荷载提出了更高的要求。因此倾斜摄影一般都是使用专业级的多旋翼或固定翼无人机。拍摄倾斜摄影的航线采取的是专用航线,要建立三维实景模型,旁向重叠度需要达到 50%以上,航向重叠度需要达到70%以上[24],航线的规划也可以通过Pix4D capture等软件完成。
生成三维实景模型的遥感影像数据处理也 是 使 用 Smart 3D、Pix4Dmapper、Agisoft Photoscan等软件,其原理也是根据控制点和POS数据进行空三运算,然后生成点云数据构建模型。以Smart 3D为例,这是一款几乎全自动的三维建模软件,只需将无人机拍摄的多角度倾斜摄影照片、相机参数等数据导入,软件就能自动对影像提取大量特征点,对特征点进行自动同名点匹配,通过空三运算得到粗糙的点云图,再根据点云构建不规则三角网生成DSM,最后通过影像自动映射纹理,生成逼真的三维实景模型(图5)。通过倾斜摄影测量做出的三维实景模型可测量模型中任意两点的距离、任意区域的面积,是名副其实的数字沙盘,相较传统的手工建模和激光扫描建模,数字化的倾斜摄影三维建模更为经济、便捷,推广应用可行性大,在城市规划、风景园林规划设计、旅游规划、历史名城保护、建筑设计和精细化设计等领域[27]28具有广阔的应用前景。
李家忠等[27]24-28利用无人机倾斜摄影技术对位于陕西韩城的金塔公园进行了航测,使用Smart 3D软件对影像进行处理,建立了场地的三维实景模型。随后使用Super Map软件中的分析工具对模型进行分析:使用量测工具对模型进行各种测量,如水平距离、空间距离、高度、空间面积和依地面积等;使用日照分析工具模拟不同时段的日照情况,对场地进行日照分析;使用视线分析工具对景观视线进行分析,以便设置重要的眺望点和观景点。最后在实景模型的基础上进行设计方案的展示,真实地表现了设计方案建成后的效果。王玮等[28]利用无人机航拍摄影测量获取场地的DOM和三维实景模型,根据这些数字模型模拟进行水文分析,得出汇水区范围,并以此为基础进行防涝景观设计。张青萍等[29]利用无人机倾斜摄影技术结合地面激光扫描仪建立苏州遂园的三维实景模型,针对私家园林的特点,提出私家园林适用的测绘方法和结果表达方式,为私家园林的研究和遗产保护提供参考。
3.3 多种传感器遥感在风景园林中的应用
随着科学技术整体上的快速发展,除了常见的非量测数码相机,针对无人机设计的小型机载激LiDAR、高光谱传感器、多光谱传感器和热成像传感器等更高级的传感器技术也逐渐成熟,在风景园林中也有所应用,但由于使用成本太高,行业内应用非常少(表1)。
激光雷达可以获取超高密度的点云数据,完成比可见光数码相机摄影测量更精确的DEM[30]、DSM和三维模型,也可用于树木测量[31]、群落结构[32]等的研究。刘清旺等[33]用机载LiDAR获取的点云数据生成冠层高度模型(Canopy Height Model,简称CHM),同时提出了从CHM中提取单株树木树高、冠幅等信息的关键算法。何斌等[34]利用搭载LiDAR的无人机对3个园林苗圃进行了航测,提取苗圃中单株树的坐标、树高、冠幅等信息,实现了园林苗圃的数字化管理。曾齐红[35]研究了利用LiDAR对古建等复杂建筑物进行精确三维重建的应用。
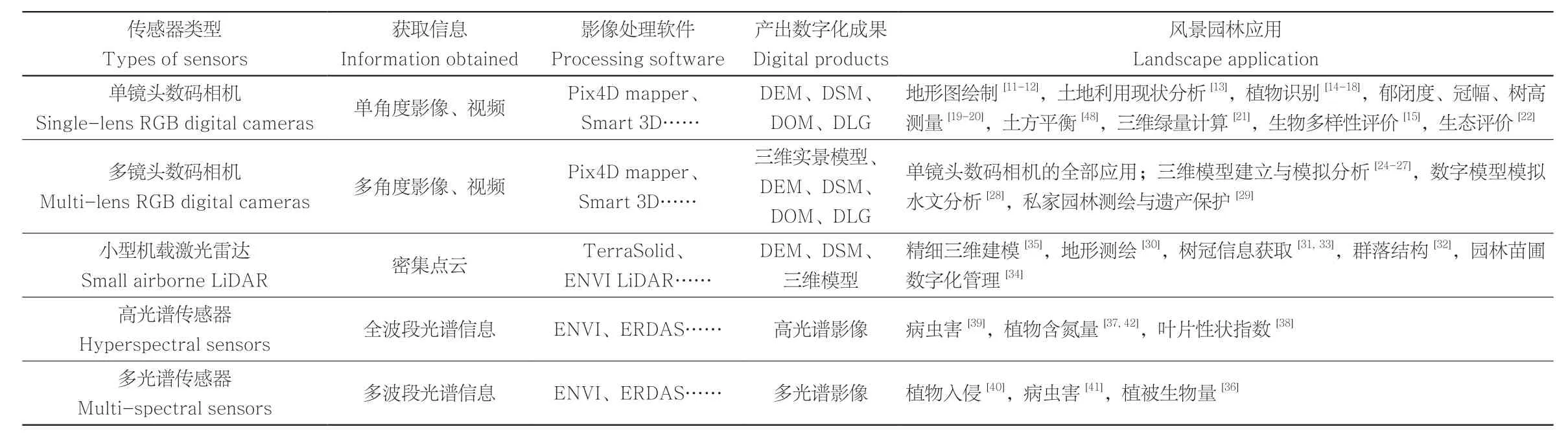
表1 常见传感器数字成果及其风景园林应用Tab.1 Common sensor products and their landscape applications
多光谱成像仪和高光谱成像仪可以收集肉眼不可见的光谱信息,这些信息可以间接反映出园林植物的生物量[36]、含氮量[37,42]、叶绿素含量、叶面积指数[38]等生理功能性状,可以据此对园林植物病虫害的空间格局[39,41]、物种入侵[40]3920-3926等进行分析和研究,在园林植物养护和病虫害防治等方面有巨大的应用潜力。国内对于无人机搭载多光谱传感器的应用还比较初级,使用的设备一般都是只有2~3个波段的多光谱相机,如胡根生等[41]利用搭载双光谱相机的无人机获取可见光和近红外图像,采用改进的加权支持向量数据描述多分类算法,实现对病害松树的识别,相比传统的人工、航片或卫片识别具有可操作性强、成本低等优点。秦占飞等[42]利用无人机高光谱影像对水稻叶片进行全氮含量估测,为区域尺度的氮素含量测定提供技术依据。周在明等[40]3920-3926利用无人机航测的普通影像和多光谱影像,通过NVDI指数模型获取了湿地入侵种互花米草(Spartina alterniflora)的覆盖度,并据此进行了分析。2015年,中国科学院遥感应用研究所使用无人机搭载四波段多光谱相机对城市公园水体进行了叶绿素反演监测、悬浮物反演监测、透明度反演监测和富营养化监测(图6)。更重要的是,通过相机内部滤光片可更换设计,可根据具体需要,更换不同滤光片,获取地物相应光谱信息。理论上可获取200多种光谱波段信息,这是任何其他卫星、多光谱仪器不可比拟的,使中国低空无人机搭载多光谱相机系统的技术更进一步。
热成像仪可以获得地表温度图谱用于生态监测等[43]。Nishar等[44]利用搭载热成像相机和数码相机的无人机对位于新西兰陶波的地热田进行了温度监测。Zarco-Tejada等[45]从搭载热成像仪和高光谱成像仪的无人机遥感影像中提取了叶片温度、叶绿素荧光指数等信息,结合地面人工调查测得的水分、叶片气孔导度等信息,判断植物受水分胁迫的强度。Homainejad等[46]分析搭载热成像仪、数码相机等多种传感器的无人机在森林火灾监测中的应用方式。
3.4 比较与分析
就目前而言,传统航测、倾斜摄影、多种传感器遥感这3个方面在风景园林领域的应用中,传统航测技术发展最为成熟,获取数据种类较多且都是风景园林规划设计与研究中常用的数据类型,操作也相对简单,在短时间内向未来推广应用的潜力最大;倾斜摄影技术虽然对飞行平台和传感器等设备的要求相对较高,但传统航测能生成数据成果倾斜摄影都能生成,在此基础上还能生成三维实景模型,一次飞行任务便可获取到风景园林师所需的几乎所有类型的航测数据,是效率最高的无人机航测技术;多种传感器遥感由于其设备的复杂性和相对较高的成本,在风景园林中的应用最少,潜力也最大,未来在这些传感器的应用上还有许多的可能性,如搭载热成像传感器的无人机可用于城市热岛效应监测,搭载多光谱传感器的无人机可用于园林树木的智慧化管理[47],搭载数码相机、高光谱成像仪等多种传感器的无人机可用于景观评价指标、数据采集等。
4 结语
无人机因其独有的优势,该产业在未来将得到快速发展。2017年12月,工信部发布《关于促进和规范民用无人机制造业发展的指导意见》“点名”支持高校设立无人机相关专业,足见国家对民用无人机发展的重视,未来无人机的应用范围必将不断扩大。
“智慧城市”的建设需要大量数字城市技术的支撑,作为各种数字化信息收集的工具之一,无人机航测使用成本低、成果更新快,非常适合风景园林等相关专业的需求,使风景园林师在获取数字化基础资料上有了更大的自主权。随着近几年无人机技术的飞速发展,较前两年有了许多变化,如新的地面站软件、新的飞控装置、新的影像处理软件等,无人机航测的操作流程不断简化,技术门槛不断降低。现在使用价格更低廉的消费级无人机(如大疆精灵系列)都可以完成精度要求不是特别高的航测任务,通过影像处理软件,也能产出DEM、DSM、DOM、三维实景模型等数据成果,为风景园林师提供了极大的便利。
无人机在风景园林中的应用起步较晚,总体而言还处于比较初级的应用阶段,但随着数字化进程和“智慧城市”建设的大潮,无人机在风景园林行业的应用将具有更多的可能性。

6 无人机搭载多光谱仪对公园水体污染的监测Surveillance of park water pollution by multi-spectrometer equipped with UAV
注释:
① 图1由济南赛尔无人机科技有限公司(Share UAV Technology Co.,Ltd.)提供;图2、4、5由作者自绘;图3引自Skyhawkvision官网;图6由中国科学院遥感应用研究所提供。
② 表1由作者自制。
