基于遥感技术的苏州市水域信息提取研究
2019-12-03邱建红谢超超
邱建红,谢超超
(1.杭州定川信息技术有限公司,浙江 杭州 310020;2.核工业井巷建设集团有限公司,浙江 湖州 313001)
1 问题的提出
随着空间信息技术的飞速发展,全天候、大面积获得多时相、高分辨率、高精度的遥感影像已成为可能[1]。水域信息的提取一直是遥感信息提取领域的基础性工作[2],遥感技术和地理信息系统技术已经逐步在国土、住建和先进省市水利部门建设本底数据库和监测非法侵占水域的违法行为中发挥重要作用。
利用高分辨率遥感影像进行水域信息提取的方法大致分为2类:一是目视解译,二是半自动或自动化信息提取。目视解译的精度相对较高,依赖于人的主观性判断,但效率较低。半自动或自动化信息提取方法种类多样,李畅游等[3]选取ETM遥感图像分别选取多波段组合运算法和多光谱混合分析法提取乌梁素海的水体,文中无法定量验证半自动化的提取精度,而且所采用的波段组合不排除只在特定的水域条件下适用;何智勇等[4]利用IKONOS数据采用小波技术、多窗口线性保持技术,结合水体信息的地学特征等多种方法对浙江省甘霖镇内的水体信息进行提取,提取精度较高,但是该方法通用性不强,研究区范围也较小,操作复杂;马鸿旭等[5]利用HJ-1A卫星影像耦合归一化差分植被指数法、归一化差分水指数法和数学形态学理论对研究区进行水体信息提取,指出该改进方法更适用于混合城市建筑及多细小支流的水体信息提取;杜云艳等[6]利用NOAA/AVHRR遥感图像,通过构造地物信息提取模型,采用面向对象的设计方法实现对水体的自动提取。近年来,面向对象的分析技术已成为高效智能遥感信息提取领域研究的热点。但是,Meinel& Neubert(2004年)和Neubert et al(2006年)认为该技术仍不能满足实际应用的需求[7]。利用面向对象分类方法提取水域虽然效率显著提高,基本不需要人为主动干预,但是阴影和水体因光谱特征相似存在混分问题,而且只能提取水体,不能有效提取水域范围,当应用于大范围且精度要求较高的水域信息提取时,精度偏低,不能满足实际应用的需要。这些自动化或半自动化提取方法虽然一定程度上提高了效率,但缺乏应用的普适性。针对特定分辨率的遥感影像,提取精度的评价方法并无统一标准,而且提取的目标基本为水体,并不能有效提取水域,因此,此类研究并没有形成相对完整成熟的理论体系[8]。
鉴于研究区范围较大,河湖水域分布情况复杂,且需要根据提取的水域计算水域面积等指标,对水域提取精度要求较高,为保证高精度尽量减小误差带来的影响,采用目视解译这种传统的遥感数据信息提取方法对苏州市的所有水域进行提取并获得全市水域面积。
2 研究区概况与数据源
苏州市地处长江、太湖下游,范围在N30°46′ —32°02′,E120°11′ — 120°16′,境内地势平坦,河港纵横交错,湖荡星罗棋布,有各类河道2万余条,大小湖泊荡漾300多个,形成“一江、百湖、万河”的独特水网。水域在苏州市防洪、排涝、灌溉、供水、航运和生态景观、水文化等方面发挥巨大的综合作用。
为了准确调查清楚苏州市水域总面积和分布情况,获取高精度的水域提取信息,采用高分辨率航空影像结合大比例尺地形图,在同一数据条件、同一技术方案和工作细度下完成水域面积勘察工作。水域信息提取使用的基础遥感影像2013年拍摄的彩色航空影像,空间分辨率为0.1 ~0.3 m,已经过正射校正和波段融合处理。作为辅助目视解译的基础地理信息数据包括1:1 000苏州市测绘基础地形图、苏州市电子地图数据。
3 水域信息提取
3.1 水域范围线界定
水域范围界定按照有硬质岸线和无硬质岸线2种基本情况。
(1)硬质岸线包括堤防,硬质护坡、护岸,挡墙和道路等,在航空影像上一般呈现为白色条状,直接沿硬质岸线迎水侧边缘勾绘水域边界(见图1)。
(2)当水域沿岸无硬质岸线,以基础地理信息数据中的水域常水位岸线为基础,结合不同时段的高分航空影像,沿水陆痕迹线勾绘水域边界(见图2)。

图1 沿岸有硬质护坡、护岸和挡墙河道水域范围示意图
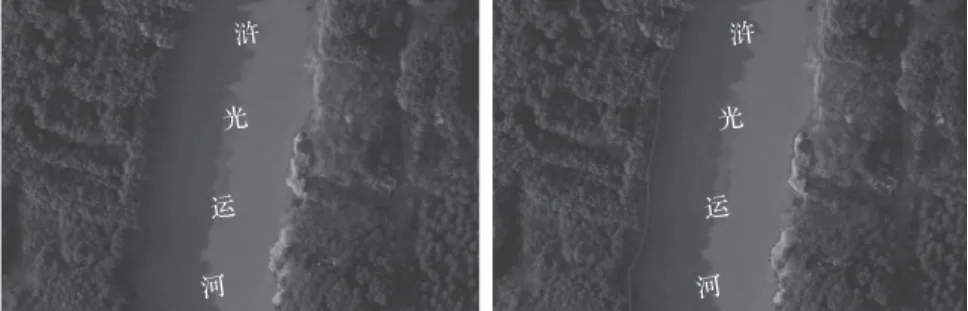
图2 沿岸无硬质岸线河道水域范围示意图
3.2 特殊情况处理
3.2.1 河道贯通
(1)2条河流贯通时,在统计这2条河流的长度时,河道中心线在贯通处贯穿,即这2条河道的长度包括贯通处范围。
(2)2条河流贯通时,如果交汇处的水域不属于某个独立的水域(例如湖泊或塘坝等),为了不重复计算,则在勾画河流水域范围面时,将该水域纳入到其中等级较高或宽度较大的河流中,另外一条河流在交汇处断开。即交汇处水域面积被计算入其中一条河流的水域面积中,另外一条河流不包括交汇处的水域面积。
(3)当河流与其他类型水域贯通时,如果交汇处的水域属于某个独立的水域类型(例如湖泊或塘坝),则在勾画该河流水域范围面时,河流两端都在交汇处独立水域断开,即这条河道的水域面积不包括交汇处独立水域,在统计区域水域面积时,可以保证不会重复计算。
3.2.2 沙洲滩地水域判定
河湖沿岸堤防或岸线之间的沙洲、滩地在一般情况下都属于河湖水域范围,只有当历史最高洪水位或者设计洪水位无法被淹没时才不属于水域。依据上述原则,结合项目实际情况,对于河湖水域范围中间的沙洲滩地是否属于水域按以下方法进行判定:
(1)当河湖水域中间的沙洲、滩地根据高分航空影像、堤防规划调查资料、基础地理信息数据存在大片的人工建筑物或有堤防线包围时不属于水域,进行镂空处理(见图3)。
(2)当河湖水域中间的沙洲、滩地无上述情况时,一般在高水位时会被淹没,因此属于水域范围。
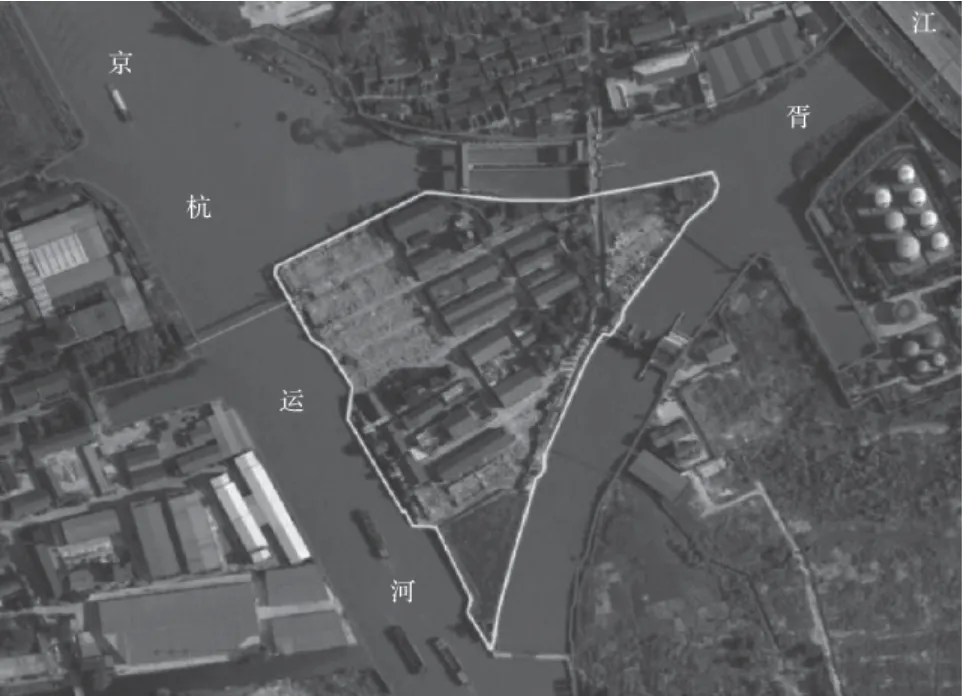
图3 沙洲滩地水域判定示意图
4 水域提取结果测量验证
利用RTK对内业提取的水域范围界线进行外业测量验证,测得点位中误差为±0.16 m,小于±0.30 m,符合《1:500、1:1 000、1:2 000外业数字测图技术规程》的要求。根据抽样河段的验证结果,本项目基于遥感手段提取的水域面积的方法精确可靠,符合实际需求,获取的水域面积精确可靠。
根据水域面积抽样测量验证结果(见表1 ~ 2)和结果验证测段示意图(见图4),本次水域信息提取相对面积误差为0.1%,其中流域性河道相对误差最低为0.1%,市管河道提取误差为0.2%,县级和镇村级河道为0.3%。分析主要原因为等级高的河道岸线多为明显的硬质岸线,易于内业解译。
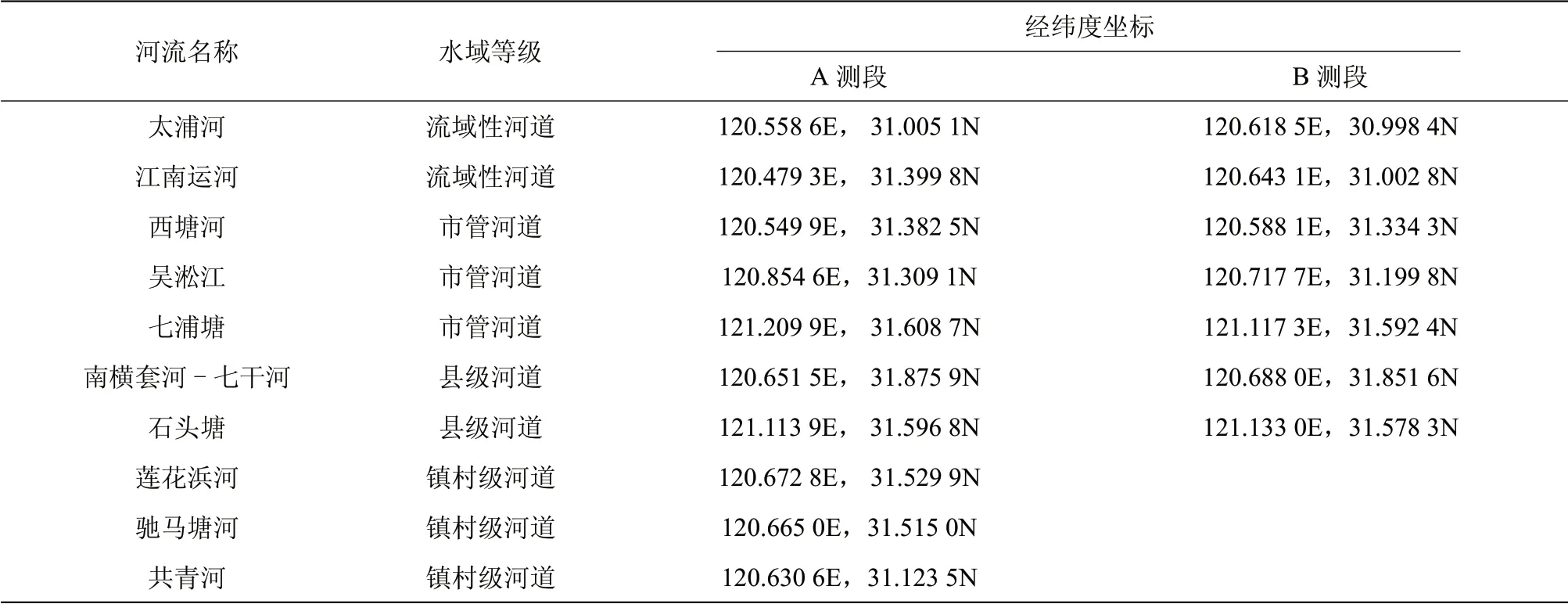
表1 水域面积抽样河道位置信息表
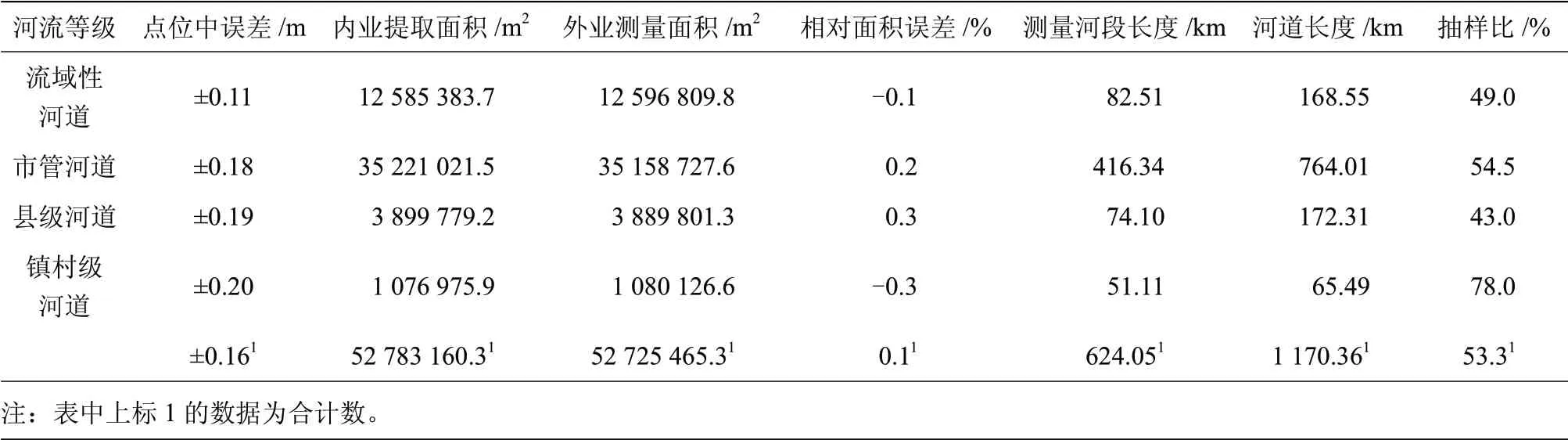
表2 水域面积抽样验证结果汇总表
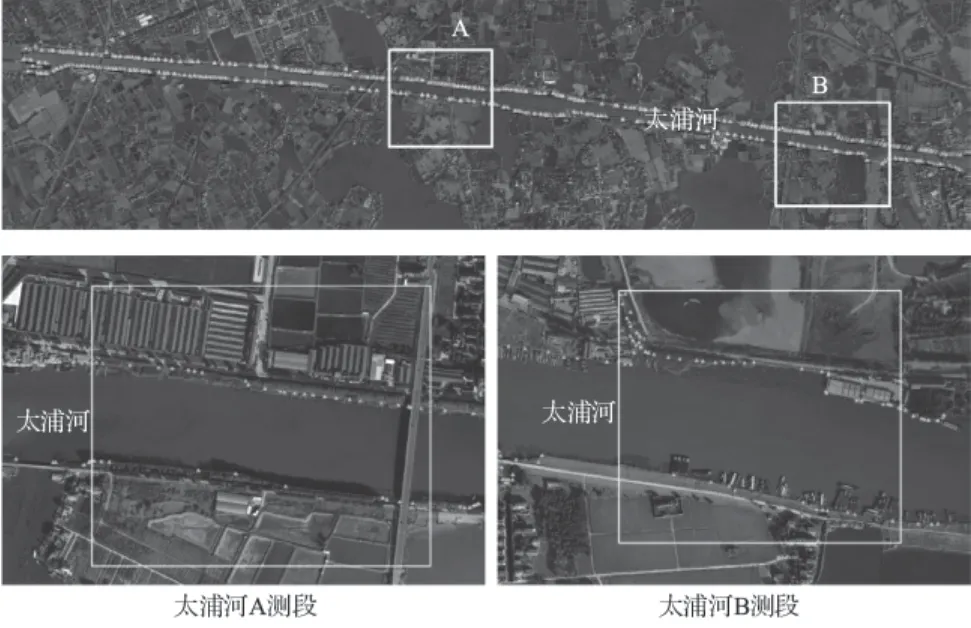
图4 结果验证测段示意图
5 结 语
在所调查区域水域情况比较复杂、水域范围较大、所用遥感数据源分辨率足够高的前提下,研究采用遥感目视解译这种信息提取手段,相比传统的人工实地巡查方式,显然效率更高,同时,也能兼顾提取精度,能够满足实际应用的需要。
但是目视解译方法依赖于解译人员的主观认知水平,解译精度与解译人员的解译经验密切相关,仍然不可避免地出现误差,为了避免人为干扰,利用遥感数据对水域进行自动化提取,加强方法普适性研究的同时兼顾合理统一的精度评价是未来探索的重点。
