三维激光扫描技术在地铁隧道变形监测中的应用
2019-12-03孙泽会曾奇刘德厚陈鸿余海忠
孙泽会,曾奇,刘德厚,陈鸿,余海忠
(1. 深圳市市政设计研究院有限公司,广东 深圳 518029;2. Woodside Priory School,Portola Valley CA USA 94028)
0 引言
隧道变形监测作为地铁隧道安全工作中的重要环节,对于监测数据的及时、高效和准确有了越来越高的要求。三维激光扫描技术是一种以激光测距方式快速获取大量测点三维坐标的测量技术,能够克服传统测量技术的局限性,获取更加全面的隧道变形信息[1],并可在隧道照明条件下正常工作。该技术数据采集效率高,完成每个测站的数据采集仅用时约5 min,较好地满足了运营地铁隧道一般只能在夜间较短时间内作业的要求。多站点云数据拼接方法作为点云数据预处理步骤之一,对后续点云数据的分析和解释起到重要作用。该方法主要分为手动匹配和软件匹配2种:手动匹配基于特征点混合拼接法,而自动匹配基于贴附标靶。目前,应用较广泛的是Iterative Close Point(ICP)算法,是基于点信息的点云拼接算法之一,该算法由Besl等[2]和Chen[3]提出,通过最小二乘算法的最优匹配方法,对点云数据进行多次重复配准,确定数据中对应关系点集并计算最优刚体转换和平移参数,迭代计算直至满足某个设定的误差收敛,经国内外许多学者的研究和改进,已成为3D点云匹配中的最经典的算法之一。在已有理论基础上,通过对深圳市轨道交通2号线某隧道自动化监测红色报警区域进行三维激光扫描,得到该区域的6站点云数据,经ICP算法配准,得到6个测站的整体拼接数据,根据拼接后的数据计算各环片椭圆度变形值,与自动化监测数据对比,达到复核及补充监测的效果。
1 项目概况
以深圳市轨道交通2号线长约130 m的隧道监测区域为研究对象,该区域位于市中心繁忙主干道下方,地上高层建筑物林立,易发生隧道变形。经隧道收敛监测发现,部分区间的道床沉降、水平位移、横向收敛变化量均较大;隧道现状调查发现,区间段部分隧道管片环纵缝接缝张开,隧道部分位置存在渗漏水、掉块,管片顶部贯穿裂缝数量较多。采用Leica Scan Station P40型三维激光扫描仪扫描该段区间6站,并使用Cyclone9.0软件进行数据处理。现场测站及标靶布置见图1。
2 数据预处理
三维激光扫描技术采集的点云数据量庞大、离散度高,隧道内复杂干扰多,易产生噪声点,影响点云数据精度。因此,数据预处理主要是对点云数据进行去噪、平滑、配准和压缩。现主要介绍点云数据的配准。点云数据的配准即求2组点云之间的刚性变换参数,将2组点云数据转换到同一坐标系下,主要包括粗配准和精配准。在配准过程中找到2组点云数据之间的对应关系,进而得到旋转矩阵和平移矩阵。ICP算法作为无特征的配准方法之一,直接对有较大重合范围的2组点云数据进行配准。首先,按照一定准则确定对应点云P和Q,在对应点云中寻找最相邻点,然后利用最小二乘法求解最优刚体变换参数R和T,直至满足精确配准的收敛精度要求。计算旋转矩阵R和平移矢量T的目标函数[4]为:

图1 测站及标靶布设图

式中:pi为目标点云点集;qi为目标点集中对应pi的最近点;R为3×3矩阵;T为3×1矢量;E(R,T)为源点集经过平移和旋转后其点集中每个点与目标点集中对应点之间距离的平方和。要满足最小二乘法的要求,需使E(R,T)达到最小。
该算法的核心步骤:利用最邻近算法,根据初始的R和T找到最优的点对,即在目标点云p中选取对应点集pi,源点云q中选取对应最近点云集qi,使‖qipi‖=min;选取对应点后,用对应点对旋转R与平移T进行估计,得到优化后的R和T;再比较变换后的点云与目标点云,只要2个点云中存在距离小于一定阈值,2点即为对应点。相邻2次距离平方和差值小于给定阈值时,结束迭代;否则,重新迭代。
为验证ICP算法的准确性和有效性,算法测试机器配置为CPU Core(TM)i7-6820HQ +2.7 GHz。选取隧道里某环点云数据为研究对象,点云数目为475 820。由于三维激光扫描仪采集数据量非常庞大,故对原始点云数据进行抽稀,抽稀后点云数目为123 580,2组点云数据见图2。粗配准是通过初步近似的旋转平移矩阵将相似度大的2片点云参考坐标系调整一致,使点云空间位置大体一致,为精确配准提供较好的初值。ICP算法粗配准成功的关键在于点云数据的初始位置,点云数据粗配准结果见图3。 精配准是在已知1个旋转平移初值的情况下,进一步计算得到更加精确的旋转平移矩阵。以粗配准结果为研究对象,采用ICP算法对其精配准,得到点云数据精配准结果(见图4)。隧道拼接后点云图见图5。
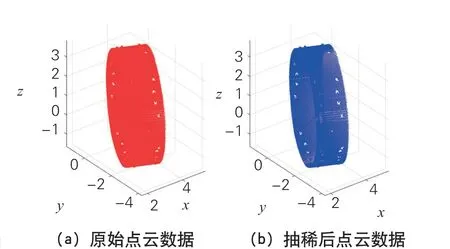
图2 点云数据

图3 点云数据粗配准结果
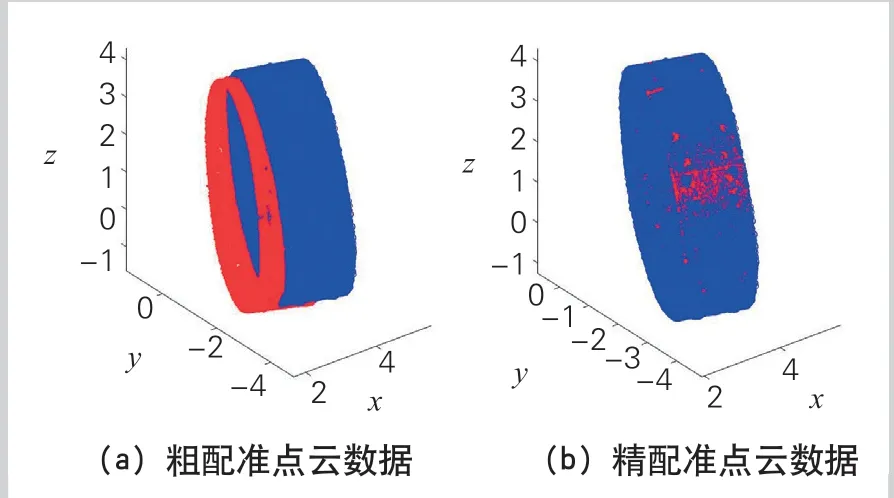
图4 点云数据精配准结果

图5 隧道拼接后点云图
3 精度分析
为了测试三维激光扫描技术在隧道变形测量中的精度与可靠性,采用测角精度为±0.5"、测距精度为0.6 mm±1 ppm的Leica TS50高精度全站仪,在隧道内选取6个断面布设平面反射标靶,分别采用三维激光扫描仪与全站仪扫描各标靶并提取中心点坐标,同时测量各标靶中心点坐标,比较两者精度。全站仪是传统的变形测量技术,其测量精度可作为基准参考。转换后标靶的扫描坐标与全站仪实测坐标见表1。
选取A、B、C、D 4个平面标靶数据为控制点,通过坐标转换式以及最小二乘间接平差原理,计算扫描仪坐标系转换至全站仪坐标系下的变换参数,将其他6个标靶数据作为对比分析点,利用变换参数将其扫描坐标转换至全站仪坐标系下,并与实测坐标对比。转换后的标靶扫描坐标与全站仪实测坐标的差值见表2。可以看出,三维激光扫描仪获取的坐标与全站仪测量坐标的差值最大不超过4 mm,单站三维激光扫描数据精度可达毫米级,具有较高的性能和精度,满足GB 50308—2008《城市轨道交通工程测量规范》[5]中变形监测Ⅱ级所要求的±3 mm 及±5 mm。因此,Leica Scan Station P40型三维激光扫描仪的测量精度满足隧道结构变形监测要求。
4 断面提取及变形分析
在实际扫描作业中,由于隧道障碍物遮挡等原因导致断面上并不是每个方向都有激光点云数据;此外,在外部荷载作用下,设隧道最初由圆形截面逐渐形变为1个离心率很小的椭圆,使用椭圆拟合断面轮廓表征隧道随时间的变形过程。采用最小二乘椭圆拟合法,用平面二次曲线的一般方程可表示为:

根据最小二乘法准则,曲线上点(xi,yi)到曲线P(m,n)=0的代数距离,即可通过解析所有点的最小代数距离平方和的方法求解出相应的二次曲线。对不在曲线上的点进行最小二乘法拟合,组成法方程进行迭代至收敛,即可求出方程系数矩阵m=[a, b, c, d, e, f]T,求得上述系数后, 按照解析几何中的方法求得椭圆的中心点坐标(x0,y0)、长轴a、短轴b。断面原始点分布及椭圆拟合曲线见图6。
我国通常使用椭圆度评价地铁隧道断面变形。根据GB 504426—2008《盾构法隧道施工与验收规范》[7], 隧道断面的椭圆度小于5‰D为合格。因此采用椭圆度分析隧道断面变形。

图6 断面原始点分布及椭圆拟合曲线
椭圆度计算公式[8]:

式中:a为椭圆的长半轴;b为椭圆的短半轴;r为标称半径,深圳市轨道交通2号线盾构隧道设计半径参考值为2.70 m。其中1个断面的实测数据点和断面椭圆曲线拟合结果见图7。
5 成果分析
使用Cyclone9.0软件将点云数据按1.5 m等间隔截取断面,利用Point Cloud数据处理平台将断面进行最小二乘法拟合,即可得到拟合后的椭圆断面点云数据。隧道断面椭圆曲线参数见表3。
由表3可知,计算得到的22个断面中椭圆度最大是环号15,椭圆度数值22.129 629 63,根据《盾构法隧道施工与验收规范》中地铁隧道的椭圆度限值:±5‰D。结果表明,实验区段隧道断面椭圆度在5‰D~25‰D,说明区间内隧道整体变形较大。
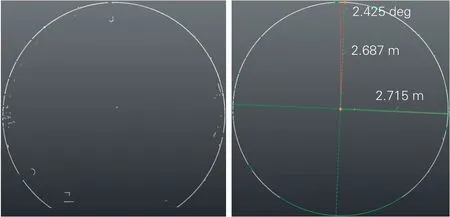
图7 实测数据点和断面椭圆曲线拟合结果

表3 隧道断面椭圆曲线参数
6 结束语
分析结果表明,三维激光扫描仪测量精度满足隧道结构变形监测要求,可准确、快速获取隧道空间数据,提高作业效率。采用三维激光扫描技术进行隧道变形监测,所得结果与传统变形监测基本一致。同时,结合传统监测手段,从局部和整体进行变形监测分析,可取得更好的监测效果。
