半潜驳倾角实时监测和预警研究
2019-12-03郑远斌毕莉莉刘祺王雪刚
郑远斌,毕莉莉*,刘祺,王雪刚
(中交四航局第三工程有限公司,广东 湛江 524005;2.中国船级社广州分社,广东 广州 510235;3.中交四航工程研究院有限公司,广东 广州 510230)
0 引言
随着我国近岸深水岸线的逐步减少以及船舶的大型化趋势,港口码头建设逐步向大型深水泊位方向发展,与之相适应的沉箱也逐渐向大型化发展。大型沉箱由于其体积大、重量大等结构特点,往往预制后运至施工现场进行沉放安装。由于离岸深水港建设多处于外海无掩护水域,风浪和涌浪显著,使得半潜驳下潜装卸、海上运输具有很大风险,船舶的稳性受到严峻的考验,稍有不慎就会造成巨大的损失。随着船舶姿态控制自动化程度的不断提高,尤其对于工程船如半潜驳,其在沉箱上驳、出坞等作业中,船舶纵横倾姿态是其操作压载水系统的重要依据。为了保证船舶的稳性和作业安全,必须实现对船舶姿态的实时、直观、准确地监测。
贾晓博等[1]针对现有的多种周跳检测与修复、整周模糊度求解算法以及单纯GPS测姿和单纯惯导测姿的优缺点,提出了一种适合船舶姿态测定的方案。徐涛等[2]提出一套基于姿态监测技术和相关姿态传感器进行实时姿态测量的半潜式钻井平台监测系统架构,得到半潜式钻井平台在纵荡、横荡和升沉运动过程中三轴向线性加速度分量。史政[3]从船舶稳性、结构安全性出发,研究即时预报技术,提出针对具体船舶、航区建立具体预报数据库的概念,并给出可能的经验公式。蔡明伦等[4]基于膜电位倾角传感器及ACL-8112PG数据采集卡,设计了一套船舶横摇、纵摇姿态测量系统,并给出了实船姿态测量的具体方案。岳大超等提出了一种船舶纵横倾姿态数字化测量系统的总体框架设计方案,通过能够适应船舶高盐高温工作环境的旋转变压器对船舶纵横倾姿态信息进行采集。周健等[5]比较了BD2/GPS四频高精度接收机与传统单一GPS接收机对远望号的测姿精度,并开发设计出一套多系统测姿系统。刘新明等[6]根据船体甲板结构布局,设计了一套GPS测姿系统,利用GPS载波相位测姿技术确定船舶姿态。张龙平[7]研究了利用动态基线求解姿态角的方法,给出了一种求取船舶实时姿态的方法,并通过静态和动态试验验证了该种方法的可靠性和适用性。黄政等[8]利用敏感元件直接测量船舶姿态信息,并利用计算机进行姿态计算和坐标变换,对船舶姿态进行在线监测。唐原广等[9]设计一种基于微机电系统技术的波高倾斜一体化传感器的船舶运动姿态测量系统。目前,以上的监测系统只是对船舶运动姿态进行监测,但是鲜有对工程船舶的监测关注以及三维实时监测和预警功能。
本文以“广州号”半潜驳为研究对象,在半潜驳4个边角舱室安装四角吃水传感器,并通过四角吃水反推半潜驳的纵倾角和横倾角。并使用Compass计算“广州号”半潜驳装载某沉箱的极限纵倾角和横倾角,并与该船的设计极限值进行对比,实现该半潜驳的安全性预警。
1 半潜驳参数
以“广州号”半潜驳为研究对象,该船为非自航半潜甲板船,箱形船体、两侧坞墙、首尾船底斜切、举升甲板无脊弧无梁拱、圆弧舭部、单底单甲板钢质焊接结构。主要用于装运和沉浮水工建筑工程的大型混凝土沉箱,也可装运其他大型钢结构和设备。“广州号”半潜驳主要用于装载沉箱在沿海或遮蔽海域作业及国外近海无人拖航,国内近海有人拖航。
本船最大沉深24.2 m,塔楼的顶甲板距基线最低为29.3 m,船左右塔楼在距基线23.2 m处设水密安全甲板。四角压载水舱包含安全甲板以下的塔体空间,全船共设20个压载水舱。半潜驳主要参数见表1,其外形如图1所示。
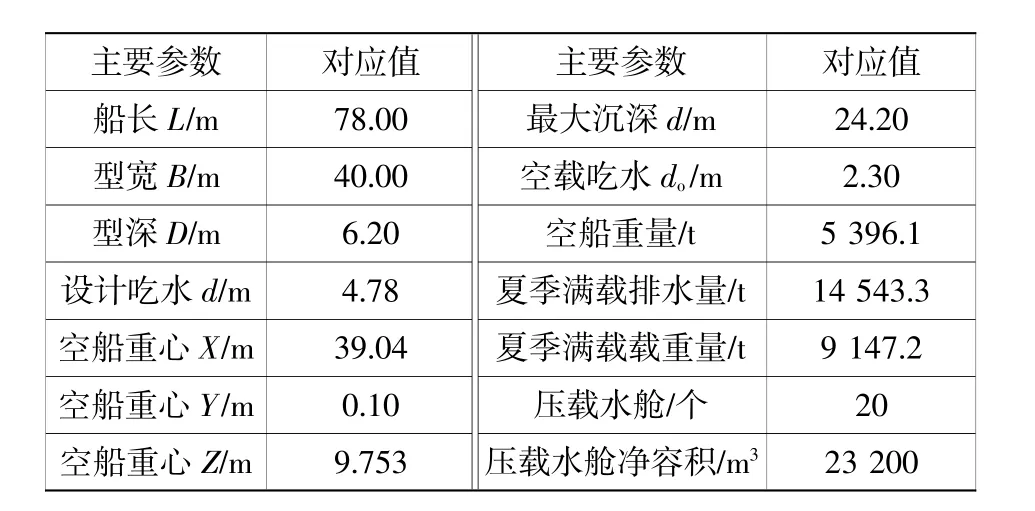
表1 “广州号”半潜驳主要参数Table 1 The main parameters of"GUANG ZHOU"semi-submersible barge

图1 “广州号”半潜驳Fig.1 "GUANG ZHOU"semi-submersible barge
2 倾角测量
2.1 测量系统
半潜驳4个边舱的吃水测量采用压电式四角吃水传感器,其型号为麦克MPM4700,其输出为4~20 mA的电流信号。四角吃水测量系统示意图如图2所示。
2.2 传感器安装
四角吃水传感器分别安装在No.2B.W.T.(P2)、No.2B.W.T.(S2)、 No.4B.W.T.(P2) 和 No.4.B.W.T.(S2)4个压载舱内合适位置(尽量靠近半潜驳的船艏和船艉位置),传感器安装位置如图3所示。
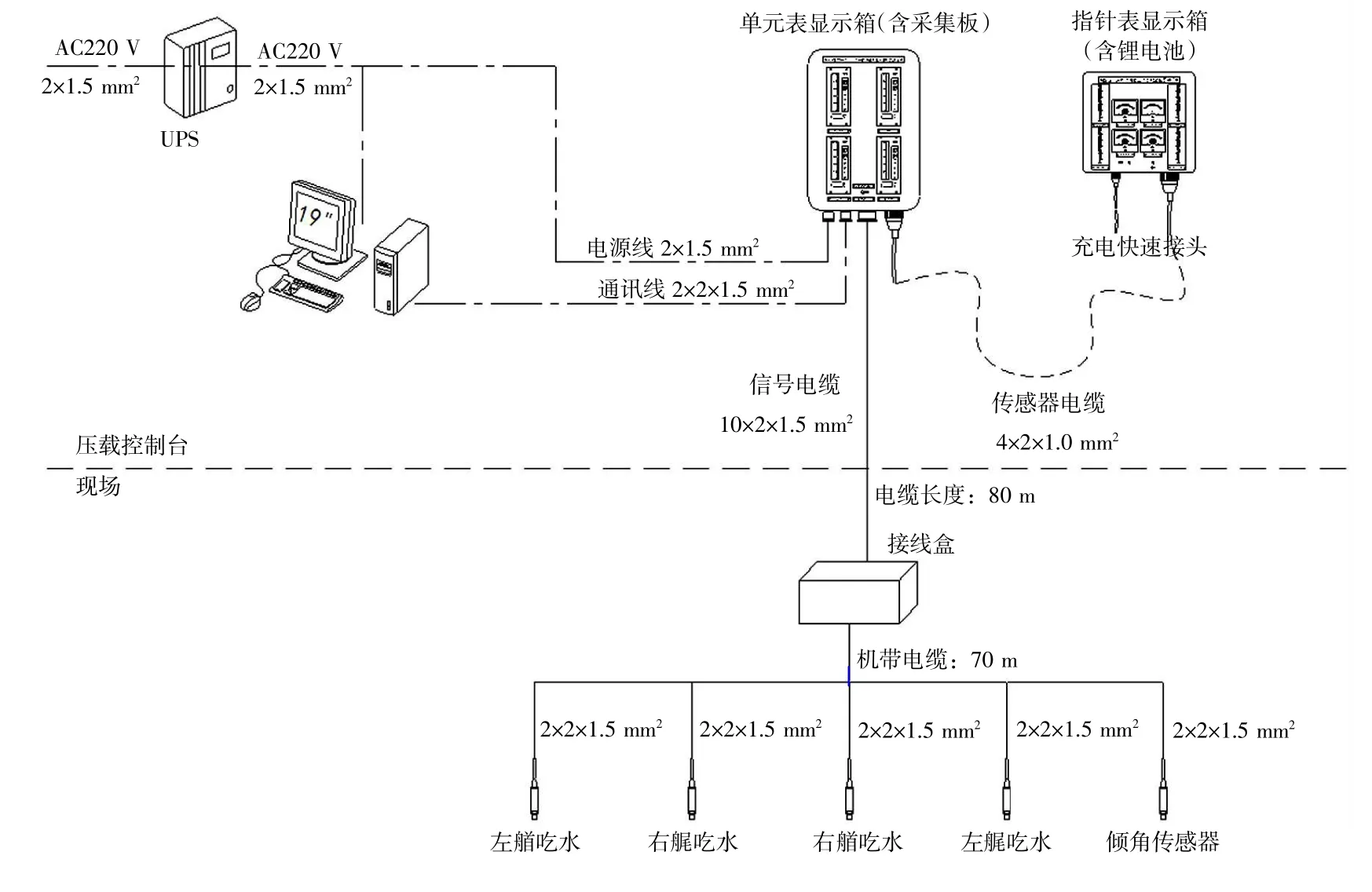
图2 四角吃水测量系统图Fig.2 Four-corner draught measurement system
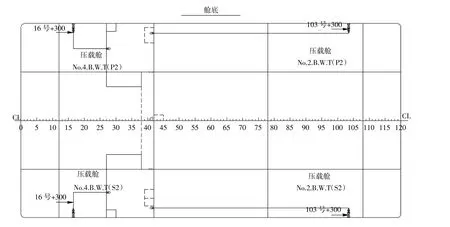
图3 四角吃水传感器安装位置图Fig.3 Installation location of four-corner draught sensors
2.3 倾角推算
纵倾角和横倾角作为船舶运动指标,是通过四角吃水数据反推而来,横倾角和纵倾角的计算公式如下:

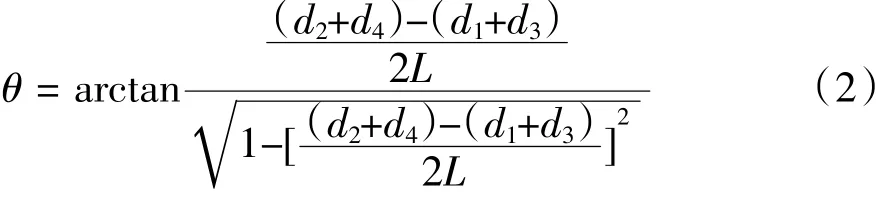
式中:准为横倾角;兹为纵倾角;L为船长;B为型宽;d1为左艏吃水;d2为左艉吃水;d3为右艏吃水;d4为右艉吃水。其中,坐标系定义为艉正艏负、左正右负。
3 极限倾角计算
运行Compass软件,输入船舶主要参数:船长、型宽、型深、设计吃水和肋距等参数,定义船舶横剖面、纵剖面,定义梁拱、脊弧生成甲板,定义单元体(压载水舱、燃油舱等),定义附体(两侧坞墙、顶甲板室、沉箱等),生成Compass计算模型如图4所示。
“广州号”半潜驳出运某重力式码头的3 390 t沉箱,其结构图如图5所示。Compass建模计算时,认为该沉箱构件是“广州号”半潜驳的一部分,两者在硬连接。此外,该船设计出厂时,一般下潜和起浮过程中横倾角不能超过1毅,纵倾角不能超过2毅;当半潜驳吃水在16~18 m以上或半潜驳装载构件重新至举升甲板出水阶段时,纵倾角应臆1毅。最终获得“广州号”半潜驳出运3 390 t沉箱的极限纵倾角和横倾角如图6所示。

图4 “广州号”半潜驳Compass建模Fig.4Compass model of"GUANG ZHOU"semi-submersible barge

图5 “广州号”半潜驳出运某沉箱结构图(mm)Fig.5 Structural drawing of a caisson transported by"GUANG ZHOU"semi-submersible barge(mm)

图6 “广州号”半潜驳出运3 390 t沉箱的极限纵倾角和横倾角Fig.6 The ultimate longitudinal and transverse inclination of 3 390 t caissons transported by"GUANG ZHOU"semi-submersible barge
4 监测和预警
监测和预警系统采用工业计算机并配有高性能的图形板卡,通过对被测船舶进行建模,将传感器采集的船舶纵横倾角度、压载舱液位、船舶吃水变化等实时数据与船舶模型各对应部位进行匹配,运用高性能显示模块实时、全景的显示船舶姿态三维动态图形。其主要功能包括:监测通道报警、三维视角锁定、三维视角模式切换、船舶姿态三维动态显示、船舶纵横倾轨迹动态捕捉、压载舱液位三维动态显示、压载舱液位柱状图动态显示、压载沉箱动态加载、软件通讯故障检测、测点通道参数编辑、船舶倾斜仪辅助修正等功能。使用Microsoft Visual Basic 6.0可视化编程语言开发,经过对象三维建模、现场参数采集、数据与模型配置、三维界面设计等,系统开发了实时三维动态显示软件,其主界面如图7所示。三维软件人机页面划分为三大区域,顶部(区域一):报警信息及系统时间显示区;中部(区域二):三维动态显示区;底部(区域三):压载舱数据显示区。

图7 “广州号”半潜驳倾角实时监测和预警系统界面Fig.7 Interface of real-time monitoring and early warning system for inclination angle of"GUANG ZHOU"semi-submersible barge
区域二即三维动态显示区又分为左、中、右三部分。左边部分显示当前所选舱室的具体液位、舱容、重量信息,左、右艉吃水信息,纵倾、横倾信息(通过四角吃水计算所得)以及纵倾、横倾信息(通过倾角传感器测量所得)。中间部分显示船体姿态或舱室液位三维动态显示,左舷、右舷、舯吃水信息以及相关模式或编辑功能按钮位置。右边部分显示纵、横倾动态轨迹显示及横倾状态显示。
图7顶部为预警窗口,根据图6中“广州号”半潜驳出运3 390 t沉箱的极限纵倾斜和横倾角的结果,预警情况设置为:当横倾值逸1毅或纵倾值逸1毅时(报警值可根据实际出运构件的情形适当调整),触发高位报警,计算机显示黄色闪烁并蜂鸣器响;当横倾值逸2毅或纵倾值逸2毅时(报警值可根据设计情况调整),触发高高位报警,计算机显示红色闪烁并蜂鸣器响。
5 结语
本文以半潜驳为研究对象,在其4个边角舱室安装四角吃水传感器,并通过四角吃水的数值反推半潜驳的纵倾和横倾角,达到实时监测该船运动姿态的目的。同时,使用中国船级社Compass软件计算“广州号”半潜驳装载某沉箱的极限纵倾角和横倾角,并与该船的出厂设计极限值进行对比,通过纵倾角和横倾角达到对半潜驳的安全性进行预警的目的。经运行检验,该监测预警方法能快速、直观地监测半潜驳作业的稳性和安全性。该监测和预警方法可移植到类似工程船舶上,具有广阔的应用前景。
