基于STM32的车辆智能避障控制系统设计
2019-12-02张微杨博云王韵琪
张微 杨博云 王韵琪
【摘 要】本系统以STM32F103ZET6单片机为核心,辅以图像识别模块、wifi模块、红外传感模块、数据采集模块等组成。设计一个由主站控制从站的车辆智能避障控制系统。利用移动终端与上位机实现数据的传输与控制,保证系统的稳定运行。
【关键字】STM32;智能小车;避障系统
中图分类号: TP23文献标识码: A 文章编号: 2095-2457(2019)32-0024-002
DOI:10.19694/j.cnki.issn2095-2457.2019.32.010
Design of Intelligent Vehicle Obstacle Avoidance System Based on STM32
ZHANG Wei YANG Bo-yun WANG Yun-qi
(College of Electornic & Information Engineering
【Abstract】This system based on STM32F103ZET6 MCU, is composed of image recognition module、wifi module、infrared sensor module、data acquisition module and so on. It realizes an intelligent vehicle obstacle avoidance control systen whose slave station is controlled by master station.lt use mobile terminal and computer to realize transmission and control, ensure the stable operation of system.
【Key words】STM32; Intelligent Vehicle; Obstacle Avoidance System
0 引言
车辆智能避障控制系统是一种集规划决策、通信导航、自动行驶、环境感知等功能于一体的综合系统,集中运用到机械、电气、传感器技术、自动控制、汽车电子、计算机、模式识别等多个学科,是典型的高新技术综合体,能起到缩短作业时间、降低能源和材料的消耗、改善操作条件、提高产品质量以及改善经营管理、加强企业管理等多方面的作用,具有重要的军用及民用价值。
迄今,关于车辆智能避障系统的研究还不多见,本文用STM32F103ZET6单片机作为主控芯片,采用模块化的设计方案,设计一套车辆智能避障控制系统,经测试可应用于智能交通和包裹分拣等场合[1]。
1 方案设计
STM32F103系列单片机具有强大、高效的指令系统、高性能的模拟技术及丰富的外围模块。方便高效的开发环境使操作更加简便,低功耗是其他类单片机难以比拟的。
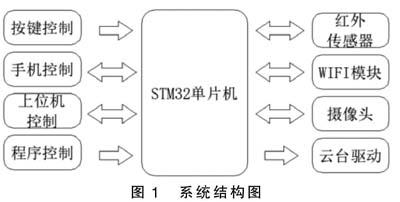
以STM32F103为核心,设计一套车辆智能避障系统。如图1所示,该系统集避障模块、云台模块、红外传感模块、循迹模块、摄像头模块、电机驱动等硬件装置于一体,利用软件算法处理信号驱动小车运动,同时实现实时画面显示、循迹、避障功能[2]。
图1 系统结构图
2 功能实现
2.1 循迹功能
单片机通过判断三路循迹模块的状态来控制小车运动。当三路都检测到信号时,小车直线运动;当左路无信号时,小车左转;当右路无信号时,小车右转。
2.2 避障功能
单片机获取两个红外避障模块的状态,当左路检测到信号时,小车后退并右转;当右路检测到信号时,小车后退并左转;当两边都检测到时,小车后退并右转;当无信号检测到时,小车直线行驶。
2.3 上位机与移动终端控制功能
單片机整合舵机模块、摄像头模块、电机模块、WIFI模块的功能,通过移动终端APP与上位机,实现对小车的控制,小车摄像头画面通过WIFI反馈给移动终端与上位机。
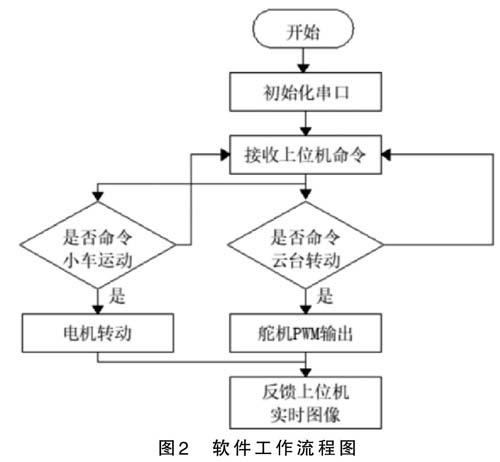
图2 软件工作流程图
2.4 红外控制功能
当单片机接收到红外信号时,红外接收头解码输出信号直接提供给单片机,单片机根据信号的类型实现小车不同的功能[3]。
3 软件系统设计
软件部分结构图如图2,首先进行程序初始化,判断是否收到小车运行、云台转动的命令。如果检测到低电平,则电机驱动模块发出运转信号,舵机驱动模块发出PWM信号,同时反馈检测到的图像信号,如果没有接收到命令,则继续等待。
4 结束语
本文主要讲述了基于STM32单片机,利用WIFI模块和低功耗图像处理模块搭建智能化的避障系统,其驱动原件由度云台和抗干扰TT马达。在实验室环境下该系统可以实现实时图像传输、上位机与移动终端WIFI控制、循迹避障等功能,系统稳态误差较小,响应迅速、动态性能快,抗干扰性和稳定性强。
【参考文献】
[1]卫静婷,陈利伟.基于STM32的语音控制和自动避障智能小车的设计[J].电子测试,2018.08.
[2]马德希.基于循迹避障控制系统的智能小车遥控设计[J].计算机产品与流通,2019.09.
[3]王鑫鑫.定时测距避障智能小车[J].计算机产品与流通, 2019.09.
