特殊路段车辆油门自动控制方法
2019-11-29
(延安职业技术学院,陕西 延安716000)
一、研究背景
模糊控制是上个世纪诞生的一种基于语义规则的人工智能。随着模糊控制这项技术的日益成熟,在人类生产活动的各个领域都得到了日益广泛的应用,其中的一个重要应用对象便是自动驾驶。
目前,国内外自动驾驶技术大部分的研究内容都是基于封闭环境下的高速公路或者特殊的城市道路的测试阶段,在开放环境下很难实现自动驾驶的应用。由于汽车在十字路口或者车辆和行人密集的道路行驶时,周围的环境复杂。针对这种情况,对汽车油门自动控制的研究为实现特殊路段的自动驾驶提供了一定参考依据,其中模糊控制能更好的解决自动驾驶研究中遇到的复杂问题。
二、研究现状
随着模糊控制技术的日益成熟,越来越多的研究人员开始了基于模糊控制的研究,如下是近几年将模糊控制应用于汽车行业的一些实验研究。
2014年,江苏理工学院汽车与交通工程学院的袁传义等人进行了基于模糊控制的EPS车辆操纵稳定性研究,研究设计了EPS控制系统及其控制策略,并在Simulink中搭建EPS和它的模糊控制系统模型,从而得到汽车车身侧偏角和横摆角速度仿真结果;计算结果表明,与无助力的机械式转向系统相比,装备EPS的车辆车身侧偏角的峰值和标准差分别减少了18.8%和19.1%,具有更好的操纵稳定性。
2016年,贵州大学的韩雪雯等人对重型车辆侧倾稳定性进行了分析,分析基于模糊控制。设计了模糊控制差动制动防侧翻控制系统,模糊控制被应用于上层控制器,下层控制器则采用的是差动制动控制,分别在阶跃工况和鱼钩工况下进行仿真分析。结果表明:通过设计所得到的模糊控制差动制动防侧翻控制系统在提升重型车辆的横摆稳定性和侧倾稳定性上有着很好的效果。
2017年,Xinxin Shao等人针对存在簧载质量变化、执行机构故障和控制输入约束的轮内电动汽车主动悬架,提出了一种容错模糊H∞控制设计方法。该控制器是基于四分之一车辆主动悬架模型,以悬架电机作为动力吸收体,采用动态轮内阻尼电机驱动系统设计的。该控制器的H∞性能由三个等式约束的线性矩阵不等式(LMIs)组成,利用MATLAB LMI工具箱有效地求解。将该控制器应用于电动汽车悬架系统,通过计算机仿真验证了其有效性。
2019年,北京航空航天大学的潘宇巍等人基于多级模糊控制,对车辆目标跟踪进行了研究。结果表明,车辆非线性动力学三自由度模型相较理想车辆模型更为准确的反映了高速车辆的运动特性,多级模糊控制跟踪算法可以有效实现车辆对变速度、变角速度目标的跟踪,并兼顾了驾驶的安全性。
三、研究内容
通过查阅国内外自动驾驶方面所研究和取得的成果,特殊路段下的自动驾驶的相关技术的研究很少,对于我国多样化、复杂化的道路类型,有必要对特殊道路环境下的自动驾驶进行研究。因此,本文研究了特殊道路行进车辆的油门自动控制方法,这对于在各种道路类型上实现自动驾驶有很重要的参考意义。
研究内容分为两个阶段。第一阶段是对驾驶员驾驶风格的学习。在学习阶段,主要是采集驾驶员在特殊路段行驶时,自车车速、自车与前车的距离和节气门开度之间的对应关系;通过不同的自车车速、自车与前车的距离情况下的驾驶员对节气门开度的控制来反映驾驶员的开车风格;第二阶段是控制阶段。在控制阶段,应用双模糊控制方法,基于节气门开度误差e1和节气门开度误差变化率e2的两个模糊输入量所进行的模糊推理所获得的模糊输出量为模糊输出量。之后对模糊输出量进行模糊判决,从而得到模糊控制输出量。
四、基于模糊控制的车辆油门控制方法
(一)实验设备
在实验中,测试车辆配备有车速传感器和激光扫描雷达。其中,车速传感器用于采集自车车速;激光扫描雷达安装在汽车前保险杠中央,用于实时采集自车与前车的距离。
(二)学习阶段
在学习阶段,驾驶员驾驶车辆在十字路口或者行人和车辆比较密集的路段行驶。在行驶的过程中,利用车速传感器和激光扫描雷达对自车车速v和自车与前车的距离d进行实时的采集。同时,记录下自车在不同车速和前车距离情况下的节气门开度x(为了实现对驾驶员风格和驾驶习惯更加全面的掌握,要求学习阶段的数据记录累计时间为10小时以上)。
在进行完对驾驶员驾驶经验的学习之后,利用已经采集的数据对汽车的节气门开度进行相应的自动控制,利用的方法为模糊控制。
(三)模糊控制原理
采用学习阶段时所采集到的数据对汽车的节气门开度进行相应的自动控制。利用的方法为模糊控制,即节气门开度误差e1和节气门开度误差的变化率e2作为模糊控制输入量。
选用合适的隶属函数对这两个变量进行模糊量化,从而获得两个对应的模糊输入量。根据之前学习的自车车速、自车与前车的距离和节气门开度的对应关系作为模糊控制规则进行模糊推理,以获得对应的模糊输出量。其中,基于节气门开度误差e1和节气门开度误差变化率e2的两个模糊输入量进行的模糊推理获得的模糊输出量为模糊输出量。
对模糊输出量进行模糊判决得到模糊控制输出量,并把该模糊控制输出量作为最终的节气门开度的状态量。控制系统根据最终的节气门开度状态量来控制执行器调节节气门开度的状态,从而使汽车的油门控制符合驾驶员的驾驶风格和驾驶习惯。
(四)参数的模糊化处理
所述的节气门开度的模糊控制方法,其特征在于,所述节气门开度误差和节气门开度误差变化率的模糊语言值分别为:{NB(负大 ),NS(负小 ),ZE(零 ),PS(正小 ),PB(正大 )}及 {NB(负大 ),NM(负中 ),NS(负小 ),ZE(零 ),PS(正小 ),PM(正中 ),PB(正大 )};
所述节气门开度误差的隶属度函数采用ZMF、TRIMF和SMF函数,所述节气门开度误差变化率的隶属度函数采用 TRIMF函数 ;
所述的模糊控制输出量的模糊语言值为:{JX(减小),BC(保持),ZD(增大)}。
(五)模糊论域划分及隶属函数的设计图
根据本研究的节气门开度误差e1的模糊论域划分及隶属函数的设计图如图1所示:

图1 节气门开度误差e1的模糊论域划分及隶属函数的设计图
根据本研究所得的的节气门开度误差的变化率e2的模糊论域划分及隶属函数的设计图如图2所示;
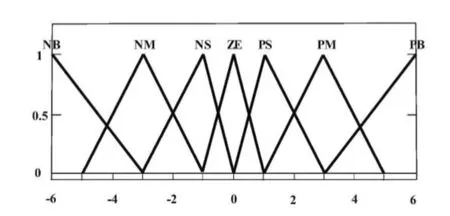
图2 节气门开度误差的变化率e2的模糊论域划分及隶属函数的设计图
(六)制定模糊控制规则
鉴于汽车在十字路口或者车辆和行人密集的道路行驶时,周围的环境复杂,既需要保证车辆行驶时的的安全性,又需要保证车辆行驶时的快速性,故制定如下规则。当节气门开度误差e1为负时,无论节气门开度误差变化率e2为何值,均需要增大节气门开度;当节气门开度误差e1和节气门开度误差变化率e2均为正时,需要减小节气门开度 。当节气门开度误差e1与节气门开度误差变化率e2有着其他的对应关系时,应综合的考虑节气门开度误差与节气门开度误差变化率对节气门开度的影响。通过经验总结推理得到如下模糊控制规则表,如下表所示。
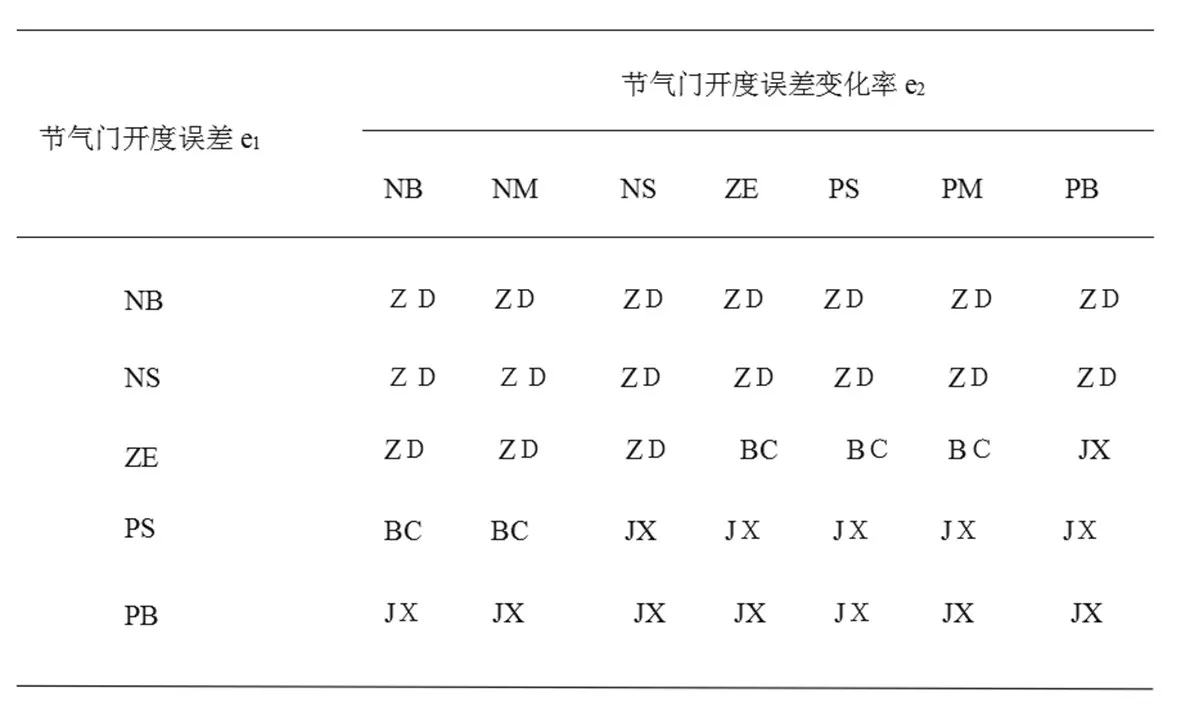
模糊控制规则表
五、讨论
当汽车在十字路口或者车辆和行人密集的道路行驶时,周围的环境复杂。这一特殊行车环境使自动驾驶的发展受到了阻力。这一行车环境既需要保证车辆行驶的安全性,也需要兼顾行驶的快速性。因而实现对行车速度的自动控制显得格外重要。
本文研究了基于模糊控制的车辆油门控制方法。该方法主要针对的场景是十字路口或者车辆和行人密集的道路。模糊控制无需建立确切的数学模型,且具有良好的鲁棒性。研究首先采集优秀驾驶人在驾驶时的自车车速v、自车与前车的距离d以及自车在不同车速和前车距离情况下的节气门开度x(为了实现对驾驶员风格和驾驶习惯更加全面的掌握,要求学习阶段的数据记录累计时间为10小时以上)。之后,以节气门开度误差e1和节气门开度误差变化率e2作为模糊输入量。在选择隶属度函数时,节气门开度误差e1采用ZMF、TRIMF和SMF函数,节气门开度误差变化率e2采用 TRIMF函数,来对这两个变量进行模糊量化。根据学习阶段所采集到的自车车速v、自车与前车的距离d和节气门开度x之间的对应关系作为模糊控制规则进行模糊推理,以获得对应的模糊输出量。其中,基于节气门开度误差e1和节气门开度误差变化率e2的两个模糊输入量进行的模糊推理获得的模糊输出量为模糊输出量。
对模糊输出量进行模糊判决得到模糊控制输出量,并把该模糊控制输出量作为最终的节气门开度的状态量。基于模糊控制,从而实现对节气门开度的自动控制,进而实现对行车速度的自动控制。
六、结束语
当汽车在十字路口或者车辆和行人密集的道路行驶时,周围的环境复杂,因而本文基于这种情况,结合车辆本身的系统动力学特点,提出了一种基于模糊控制的车辆油门控制方法。而模糊控制属于智能控制,可以实现非线性控制,无需为对象建立确切的数学模型,具有较好的鲁棒性和灵活性。这种模糊控制方法在车辆的油门传感器和减速器间加装模糊控制器和步进电机,充分借鉴优秀司机的驾驶经验,模拟司机的驾驶行为,在油门控制方面形成了较好的动态特性。当驾驶人面临这种情况时,采用模糊控制来进行油门控制能够体现出更好的可靠性和舒适性,该油门控制方法能更好的控制自动驾驶车辆速度,内部运算简便,对实现自动驾驶技术的研究有一定的参考意义。
