基于UWB 定位系统的建筑数字孪生应用*
2019-11-27何斌王菲王志鹏
何斌 王菲 王志鹏
同济大学
由于墙体、屋顶等的遮挡,GPS全球定位系统无法覆盖室内范围[1]。因此,室内定位技术在20世纪90年代应运而生。经过20多年的发展与革新,涌现出几大主流的室内定位技术,如WiFi定位、蓝牙定位、ZigBee定位、红外定位、UWB超宽带定位等[2]。其中,UWB超宽带定位技术凭借高精度、低延时、高传输速率的显著优点,成为近年来室内定位技术的热点[3]。
总结UWB定位技术的功能应用,主要分为五个方面:实时定位、电子围栏、导航服务、热点分析、行为预测。
1 UWB定位系统组成
UWB室内定位系统由定位基站、定位标签、同步控制器、解算引擎(服务器)四部分构成。
如图1所示,由4台及以上的基站组成正多边形网络,为保证基站的时间同步,基站之间通过光纤或者超六类网线互相串接至同步控制器。定位标签按照特定频率向各台基站发送窄脉冲信号,不断和位置已知的基站进行距离测量。当用于行人定位时,信号频率一般设置在10~50Hz。用光纤或者网线串接在一起的所有基站称为一组,每一组选出一个基站作为协调器,用于汇总该组所有基站的数据,并将其发送至同步控制器。同步控制器通过路由器将数据传至解算引擎中进行数据融合和实时解算。最终将数据存储至数据库,或在上位机界面进行可视化。
2 UWB定位方法及求解算法
本文中的UWB系统采用TDOA算法。TDOA算法的chan[4-6]求解过程如下。
目标标签的位置用(x,y)表示,假设定位基站的坐标已确定,基站Ti的二维坐标用(xi,yi)表示,ri表示基站Ti到目标标签的距离,i=1,2,3,4……。
我们令:

将其写成矩阵形式:

我们令:

即有:

考虑到存在噪声影响,结果会存在误差,误差向量为:

Chan算法利用加权最小二乘法WLS求解,当基站与目标标签距离较近时:

当基站与目标标签距离较远时:
1 UWB 室内定位系统图
2 不同数量基站定位误差折线图
3 狭长型基站分布定位图
4 正方形基站分布定位图
5 数字孪生系统架构图
3 chan算法仿真结果与分析
利用MATLAB对chan算法进行仿真,求解目标的二维坐标(x,y),坐标单位为米。引入满足高斯分布的噪声,分析不同数量的基站、基站分布位置、不同定位区域对定位精度的影响。
3.1 基站数量对定位精度的影响
设3台基站的坐标分别是(0,0)(17,10)(0,20);设4台基站的坐标分别是(0,0)(20,0)(20,20)(0,20);设5台基站的坐标分别是(0,0)(20,0)(20,20)(0,20)(10,0)时;设6台的基站坐标分别是(0,0)(20,0)(20,20)(0,20)(10,0)(10,20)。
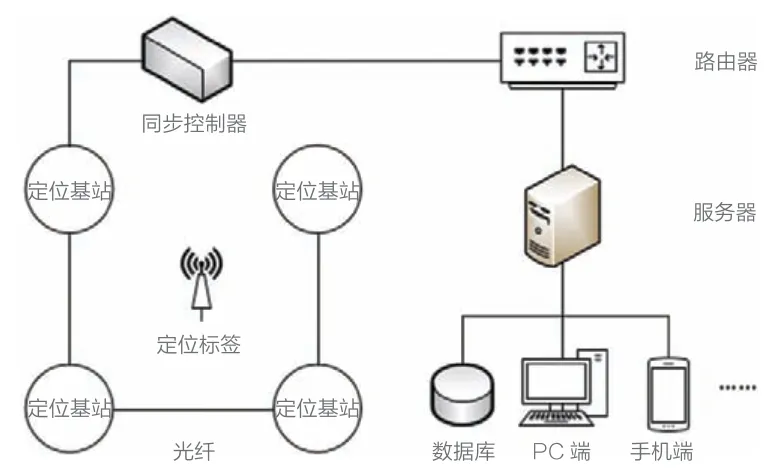
选取三个目标点进行测量,分别是包络线范围内的点A(5,5),包络线边缘的点B(0.2,2),包络线范围外的点C(0,22),在基站数量为3台、4台、5台、6台的情况下各进行100次仿真运算,取误差平均值。
不同数量基站定位误差折线图如图2所示。点A在3台、4台、5台、6台基站中的定位误差分别为1 433、44.12、19.37、18.21cm;点B在3台、4台、5台、6台基站中的定位误差分别为732、94.01、78.59、59.60cm;点C在3台、4台、5台、6台基站中的定位误差分别为2 744、104.79、91.53、81.38cm。当基站数量为3台时,定位误差高达米级;基站数目为4台时,精度降至厘米级。因此布设基站的数目至少为4台,且布设的基站数量越多,定位误差越小。
3.2 基站分布位置对定位精度的影响
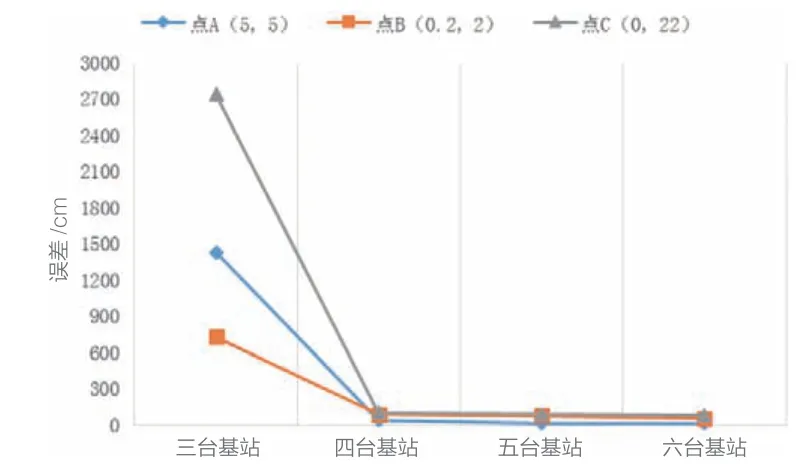
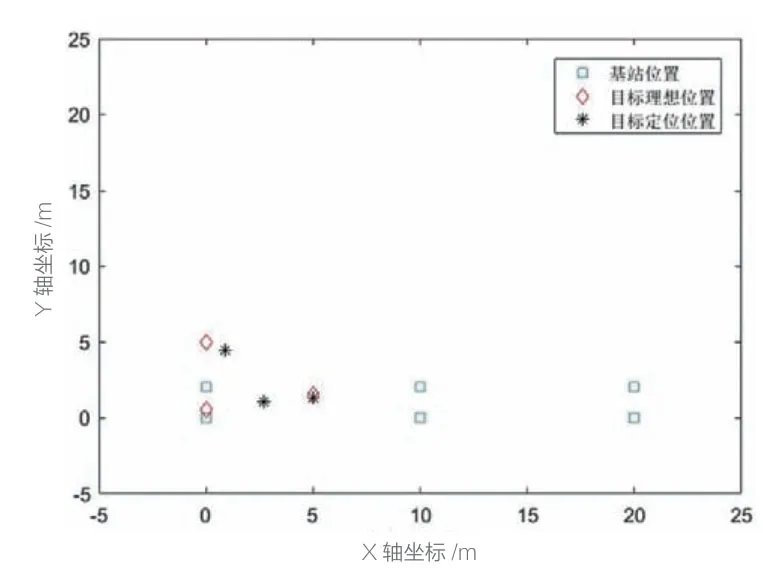
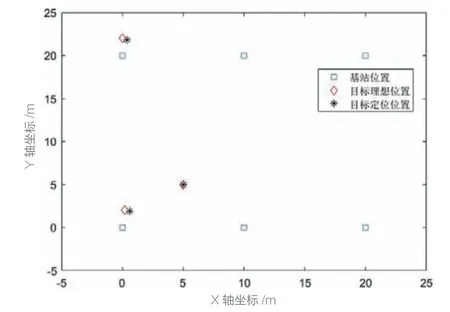
当6台基站坐标分别为(0,0)(20,0)(20,2,)(0,2)(10,0)(10,2),呈狭长型分布时(图3),包络线范围内点(5,1.5)的定位误差为54.07cm,包络线边缘的点(0,0.5)的定位误差为280.37cm,包络线范围外的点(0,5)的定位误差为173.04cm。与6台基站呈正方形分布(图4)相比,精度明显下降。因此,布设基站时应尽量按正多边形部署,避免狭长型分布。
3.3 不同定位区域对定位精度的影响
研究基站包络线内、包络线边缘、包络线外的定位精度差异。取三组定位点,y轴坐标分别为5、10、15m,x轴坐标在1~19m之间间隔0.1m取点,每组181个点。不同定位区域定位误差如表1所示。包络线内、包络线边缘、包络线外的定位误差分别为20.83、27.12、54.02cm。由此可以推断出,在基站包络线内定位精度较高,在包络线边缘以及包络线外定位精度则大幅度降低。因此,在定位过程中需注意避免定位目标超出基站包络线范围。
4 基于UWB定位系统的建筑数字孪生应用
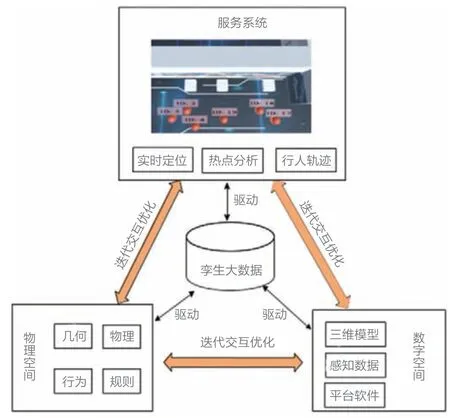
数字孪生技术是CPS系统的核心技术,已经成为国际学术界研究的热点之一。数字孪生是指在数字虚拟空间中构建的虚拟事物,与物理实体空间的真实物体对应在几何、物理、行为和规则等方面都相同的虚实映射关系[7]。数字孪生是充分利用物理模型、传感器更新、运行历史等数据,集成多学科、多物理量、多尺度、多概率的仿真过程,在虚拟空间中完成映射,从而反映相对应的实体装备的全生命周期过程[8]。数字孪生系统通过孪生大数据驱动各个环节(图5),包括物理空间、数字空间和服务系统。

表1 不同定位区域定位误差对比表

6 Unity 虚拟展厅

7 展厅数字孪生系统
8 参观轨迹图
9 参观时间表
我们利用Unity三维显示引擎搭建了一个展厅的数字孪生系统(图6),完成了展厅在几何、物理、行为、规则四个方面从物理世界到虚拟世界的映射。同时结合UWB定位系统,实现了实时定位、热点分析、行人轨迹追踪的功能。
4.1 实时定位
在展厅中,实时定位是关注参观人员或者重要物资和设备的当前位置。为定位目标佩戴定位标签,并按前文中所述要求设置基站的数量和位置,定位可覆盖展厅全部区域,精度达厘米级别,刷新率约为1s,可以解决视觉定位等方法的定位缺陷。在展厅的数字孪生系统中(图7),我们通过网络协议获取UWB定位系统解算的位置坐标以及无重复的标签ID号,在上位机界面中三维可视化参展人员的动态位置,能够为管理人员直观地显示人员位置信息和宏观分布状况,为展厅管理提供新思路。
4.2 热点分析
热点分析主要是对展厅当前参观总人数、每个展台的当前驻留人数、当前参观人数最多的展台号、驻留时间等进行分析。计算在定位范围内的标签数量,即为参观总人数;设定一定距离阈值,判断人员是否在某个展台的距离范围内,计算每个展台前的参观人数;判断当前参观人数最多的展台号,即为热点展台。
同时可以进一步分析当前展厅参观总人数和特定区域人员密度,限制参展人数,防止展厅过于拥挤造成安全事故,重点关注人员密度较大的区域,实时把控展厅安全风险。根据热点统计合理安排展台位置,分散参观人员,营造更加舒适的参展氛围。根据统计获得参观人员驻留时间最短的展台,改善其展示内容,优化展品质量。
4.3 行人轨迹
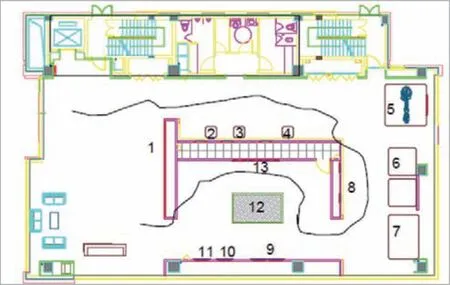
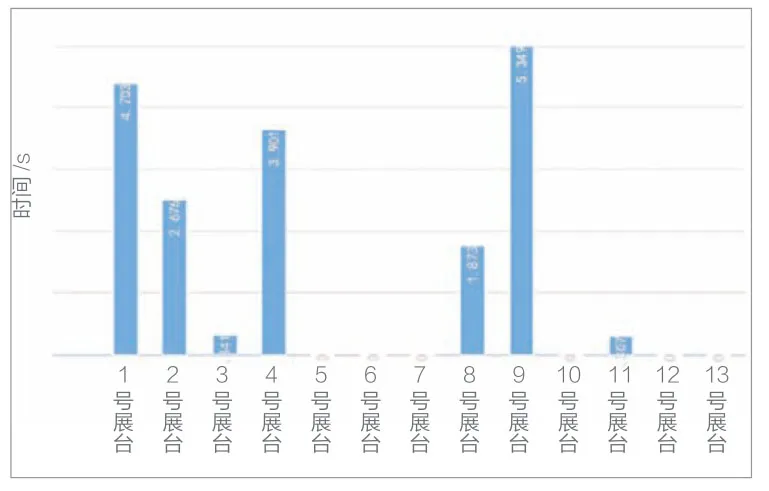
行人轨迹的功能主要关注参观者的参观轨迹以及驻留时间(图8,9)。我们为每一位参观人员分发定位标签,从进入展厅后开始记录,直至离开展厅归还标签结束记录,描绘参观者的历史轨迹图。根据标签ID号查询历史定位数据,最后利用Python画出参观轨迹图,同时利用定位数据中的时间戳计算参观者在每个展台前的驻留时间。
利用机器学习等算法可以做进一步的行为预测,如预测参观人员的下一步动作和下一处参观位置、预测展厅下一时刻的人员密度分布、预测下一时刻的热点展台号等,为照明系统、空调系统的智慧节能控制提供分析基础。
5 结语
文中提出了一种UWB室内定位技术与数字孪生的结合方法,但是数字孪生在建筑中的应用可贯穿于建筑的整个生命周期,从设计阶段到建造阶段到运维阶段,能够简化管理流程、降低管理复杂度。在未来,UWB技术势必会朝着低成本、低复杂度、更高精度的方向发展,而UWB定位技术与深度学习、数字孪生技术更高程度的融合,可根据主人的行为习惯、个人喜好等对家电产品进行智能调控,实现更加智慧的家居场景,彻底变革现有的生活模式。
