自动紧急制动系统失效场景分类研究
2019-11-26宋雪松曹建永董小飞
文/宋雪松 曹建永 董小飞
一、自动紧急刹车系统(AEBS)测试方法运用现状
AEBS是专门用于机动车避免或减缓碰撞的系统。目前,国内外对该系统性能的测试方法(如:ECE R131《移动目标车设计与验证》法规、欧盟新车安全评鉴协会(ENCAP)对AEBS的测试场景)均为无其他目标物干扰的理想道路情况。在美国交通运输部(NHTSA)发布的《自动紧急刹车研究报告》显示,除了标准车辆碰撞迫近制动系统(CIB)和动态制动支持系统(DBS)测试外,还对铁板误作用进行试验,不同环境(如:下雨、夜晚或早上太阳直射)下进行试验测试。一般代加工(OEM)厂商对AEBS的测试,主要涉及:相关法规的性能测试和实车道路试验(FOT)。其中,FOT一般对路试地点、公里数进行定义,最后统计未触发率和误触发率。这种FOT路试是一种耗费大量资源的被动型测试,针对性差、效率低。故本文尝试运用六层功能分解的方法对AEBS失效场景进行分类研究,希望能够提高测试效率和应用价值。
二、六层功能分解方法运用
由于AEBS功能在不同的场景下会发生变化,无法保证在实际场景下能达到标准测试的性能水平,因此,总结AEBS失效场景工作非常重要。然后对AEBS的功能产生影响的场景非常多,且场景复杂,因此研究场景如何对AEBS功能产生影响变得很重要。
Christian Amersbach和Hermann Winner提出的“六层功能分解方法”目前已被广泛地应用于数学、信息、机器人和分析驾驶员行为导致的交通事故等领域,它将复杂功能分解为从属功能。
本文采用六层功能分解方法对AEBS失效场景进行分类,从而降低失效场景分析的复杂性,提高场景分析的系统性,使测试任务更有针对性,科学地减少测试工作量。本文的目的在于将复杂繁多的测试场景转化为针对各层功能的测试,使测试变为有边界的测试。
1. 假阳性和假阴性分类
驾驶员辅助系统失效可以分为两大类,即假阳性(误触发,FP)和假阴性(漏触发,FN)。FP和FN是评价驾驶员辅助系统性能的重要指标,例如:在盲区监测系统中,一般FOT测试场景为高速公路场景100 km、城郊场景100 km、郊区场景100 km,FP误报率和FN漏报率均要求小于1%。
2. 功能分解方法分类
应用功能分解方法对失效场景分析时,需要对失效原因进行定位。首先,将驾驶辅助系统的功能实现分解为相互独立的6层(见图1);然后,对各层之间的接口传输信息模型进行分析,并总结各层典型失效场景。
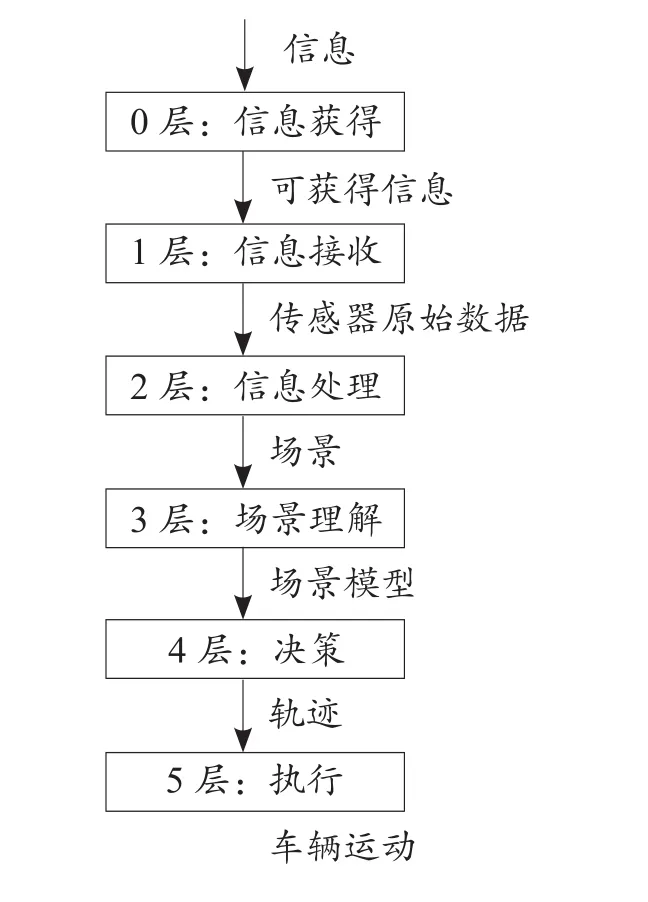
图1 功能分解层
① 第0层——信息获得
0层主要受基础设施、天气和目标物的影响,其定义适用于各级别自动驾驶与各种驾驶辅助系统,描述了哪些信息是可获得的。如,交通限速标志被前方卡车遮挡,从而导致车限速提醒系统失效场景归类为0层。此情况是属环境感知传感器的安装位置对其视场角有影响,从而影响信息获得。在实际测试中,一般假定在功能测试之前,环境感知传感器已安装在最佳位置。尽管信息获得层不是驾驶辅助系统的组成部分,但为了确保驾驶辅助功能的正常工作,必须考虑信息获得层。理想情况下,可获得信息全部从0层输入1层。
② 第1层——信息接收
信息接收层包含所有外部环境感知传感器、CAR2X软件或后端传输信息通道。第1层中发生的典型错误为视觉传感器摄像头上沾染泥巴或雪等场景,导致其无法获得全部场景信息。1层与2层接口之间为传感器原始数据、车辆到所有(v2x)监测系统无线电连接或后端传输信息。
③ 第2层——信息处理
传感器数据融合、目标分类和环境模型生成位于第2层。本层的典型错误为:目标分类错误、FP和FN目标识别。
④ 第3层——场景理解
在这一层中,第2层的场景中的目标与特定信息被挑选与扩充。本层的典型错误为预测目标车辆运动轨迹错误。
⑤ 第4层——运动决策
本层为基于场景模型辅助驾驶功能算法所确定的运动决策。它的典型错误为运动决策错误导致的与他车的碰撞。
⑥ 第5层——执行
最后一层将4层的运动规划轨迹变为实际车辆运动,包含了相应的运动执行机构与车辆运动控制算法。它典型错误为运动控制算法不稳定。
3. 失效场景分类
首先对AEBS失效场景进行整理,共总结了37种失效场景,然后对失效场景进行假阴性、假阳性分类,最后依据功能分解方法对失效场景进行分类,并简述失效原因(见表1~表6)。
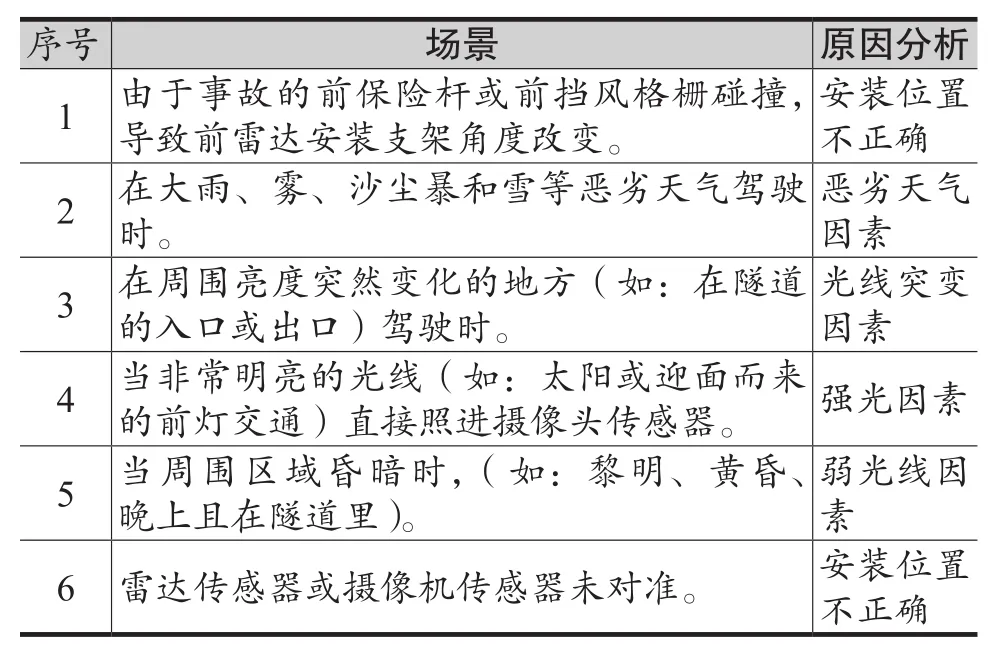
表1 0层失效场景与信息获得失效(FN)
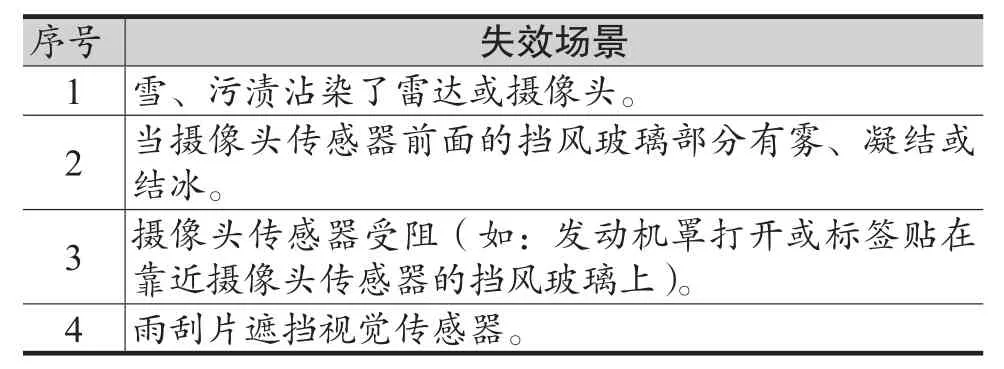
表2 1层传感器污染失效场景(FN)
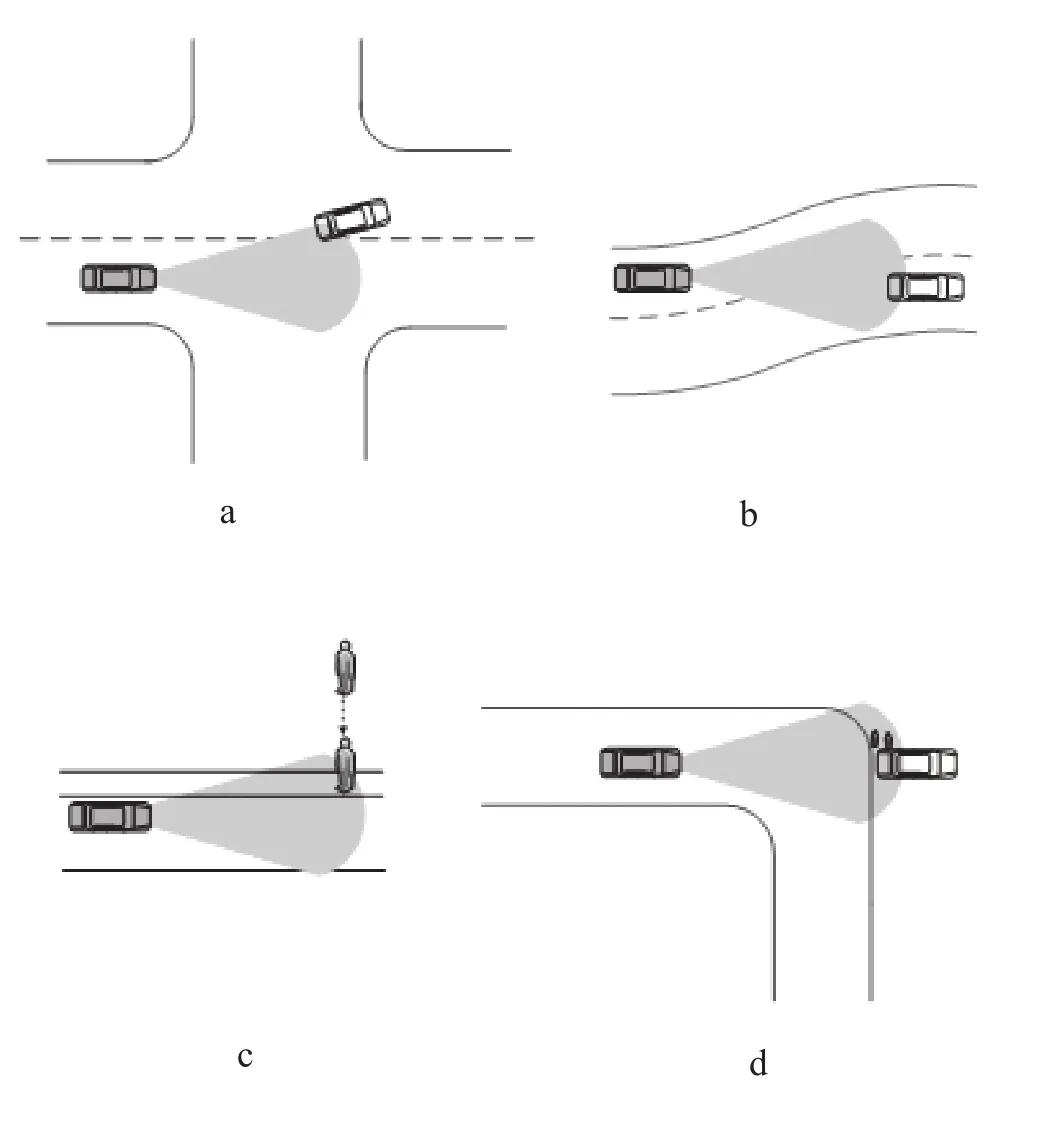
图2 试验设计4场景

表3 2层目标分类错误导致碰撞的失效场景
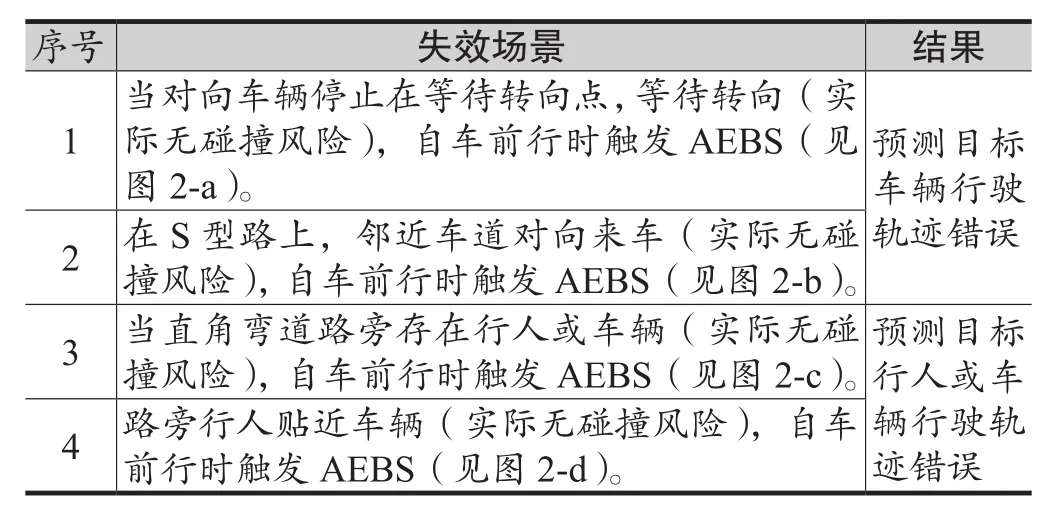
表4 3层FP失效场景
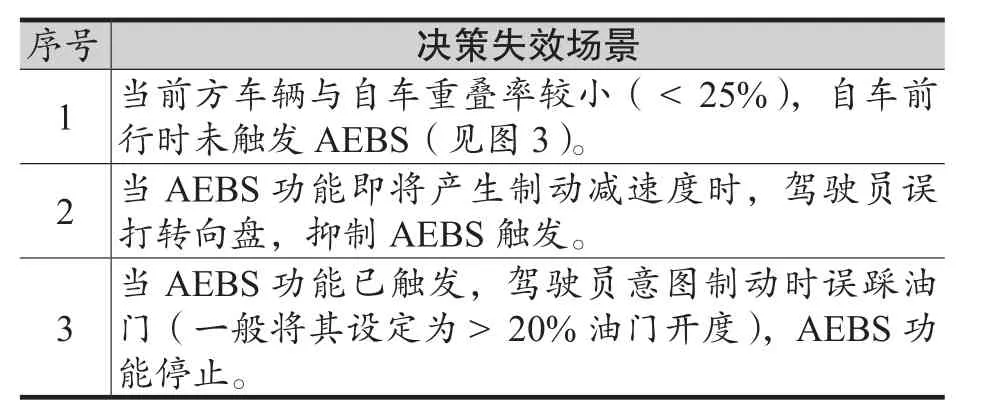
表5 4层决策失效导致碰撞场景——FN
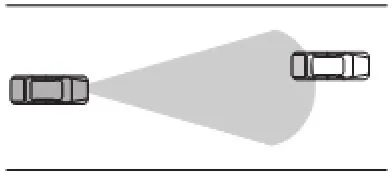
图3 误认为前方车辆与自车重叠率较小
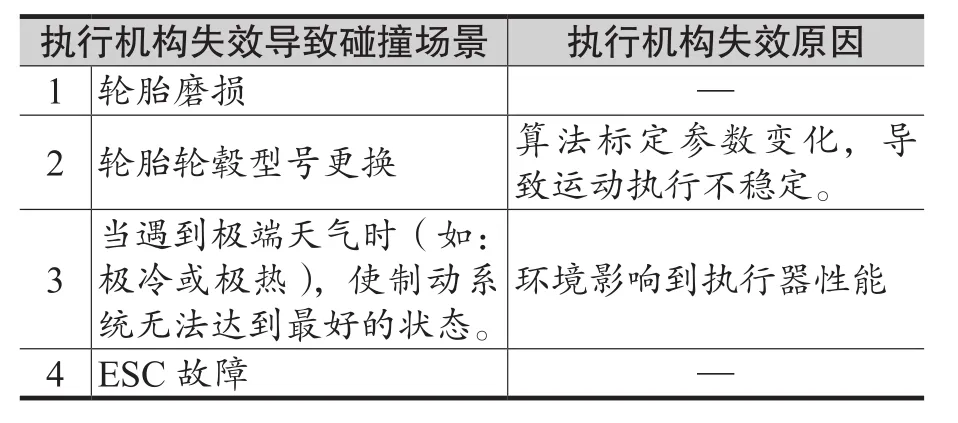
表6 5层执行机构失效导致碰撞场景——FN
在AEBS中,由于一般定义在任何情况下驾驶员均能超越AEBS功能,所以一般驾驶员可以通过加速和转向来抑制和超越AEBS功能的制动意图或停止AEBS制动功能。但在实际紧急情况下,存在驾驶员意图制动误踩油门场景,所以将此场景作为一种失效场景。
4. 行人横穿马路AEBS失效场景试验
行人横穿马路AEBS失效场景设计与试验结果(见表7)。
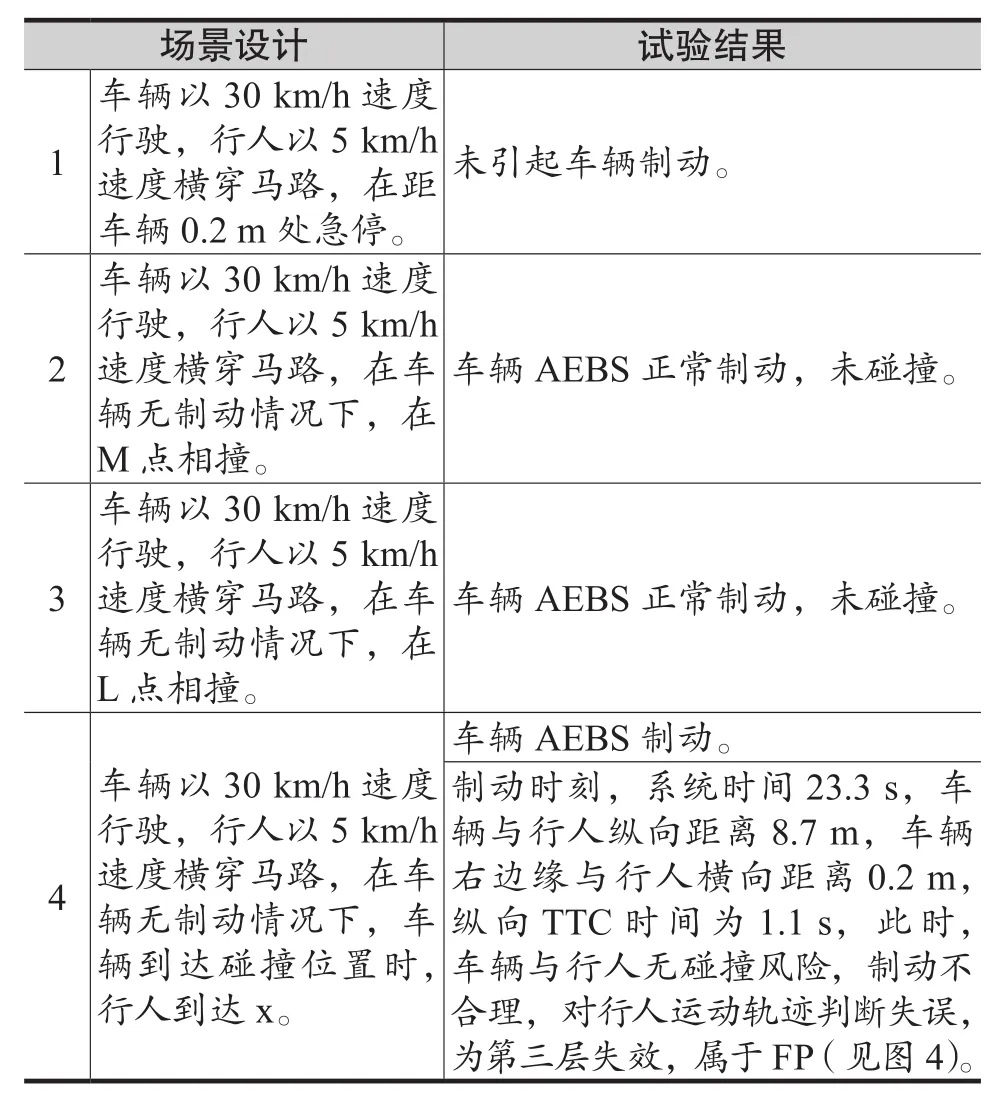
表7 行人横穿马路AEBS失效场景设计与试验结果
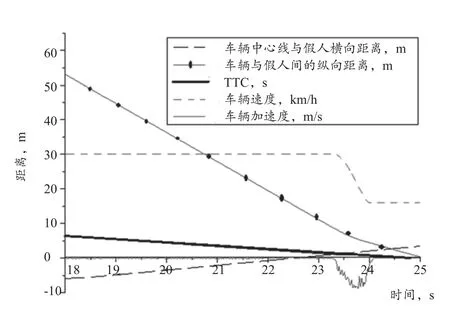
图4 场景D试验曲线
三、成 果
本文总结了37种AEBS失效场景,运用功能分解方法,对失效场景的失效功能层进行定位。依据不同功能层进行分类,从而能够系统而有边界地对AEBS功能进行验证,希望此分类研究为进一步改善AEBS功能提供借鉴。