基于双相机的激光照射性能监测系统图像畸变矫正方法
2019-11-23徐向锴罗秦景文博刘健
徐向锴,罗秦,景文博,刘健
(1.长春理工大学 光电工程学院,长春 130022;2.长春理工大学 电子信息工程学院,长春 130022)
激光照射性能监测系统是靶场鉴定、定型试验中的重要测试设备之一;该系统主要由激光照射器,移动靶车和成像系统组成。在拍摄过程中,相机跟随物体进行原地转动,由于拍摄角度是动态变化的,拍摄出的图像存在透视畸变;且成像部分采用的红外光、可见光两路相机存在不同视场、不同分辨率、不共轴和红外光图像无明显参考标志的问题,导致无法同时实现对双路图像的矫正。
目前,对图像透视畸变矫正大多停留在单相机系统下的矫正,主要方法有角度矫正法,利用Radon变换[1-2]或者Hough变换[3]检测出图像的倾斜角度并进行矫正,忽略了透视畸变、默认畸变图像与原图像满足仿射变换,当相机与物体距离较近时,矫正算法将不在有效;Wand[4]、Lucchese[5]等人提出了同时校正倾斜畸变和径向畸变的方法,但需要引入5次多项式的径向畸变模型,大大增加了算法的复杂度;利用放射非线性变换矩阵进行镜头畸变矫正[6],但无法确定非线性矩阵的初值,所以容易引起较大的误差;根据传统的像差理论,利用图像采集系统中光学子系统的结构参数计算出畸变曲线,作为空间变换的规则,对图像实施矫正[7],此方法需要知道光学系统的结构参数这往往有诸多不便,因此这种方法不常用。而本系统采用的是双路相机,而红外光图像中为了对光斑进行清晰成像,背景会变得模糊,因此无法对红外光图像进行单独的透视畸变矫正。在这些条件下,对两路相机进行透视畸变的矫正是很困难的,目前还没有一种有效的方法能够同时矫正双路图像,因此需要一种针对性的方法来解决该困难。
本文根据这一问题,提出了一种在双相机透视系统下的双路图像矫正方法。该方法利用空间坐标系变换、矩阵运算,在不需要畸变图像旋转角度的情况下能够对可见光图像和红外光图像同时矫正。实验结果表明,本文算法有矫正效果显著,速度快、复杂度低等优点。
1 双相机成像测量原理
1.1 双相机成像测量系统概述
图1是双相机成像测量设备结构示意图,测量系统由激光照射器、靶板、双路CCD相机和计算机组成。靶板在靶道上水平移动,转台上的双路CCD相机跟随靶板转动,分别用可见光相机和红外相机实时采集靶板图像和红外光斑图像并保存。完成保存后,再提取靶板十字中心和光斑中心,根据图像上光斑中心与靶板十字中心的相对位置,计算出两者的偏差量,用以指代武器系统的指向精度。

图1 双相机成像测量设备结构示意图
1.2 双相机系统透视畸变
如图2所示,在利用CCD相机录取图像时,由于相机无法正对靶板,使得相机光轴与靶板平面的法线方向存在夹角,根据相机的透视成像原理,此时可见光CCD相机所成的靶板图像存在透视畸变,这会对之后的靶板十字中心的提取造成误差;同样的,当红外光相机对光斑成像时也会存在透视畸变,对光斑中心的提取造成误差。并且本系统是双相机系统,可见光相机与红外相机不同轴,且分别率与视场角均不相同,因此两者所成的像存在三维空间上的差异,这更增加了后期处理的难度,为了提高测量精度,在识别图像之前,要对畸变的靶板图像和红外光斑图像进行畸变矫正。本文提出了一种基于双相机透视系统的畸变图像矫正方法。

图2 畸变成像示意图
2 双相机透视畸变矫正
由于本系统为摄远系统,受到大气湍流的影响较大,为了保证光斑的质量,减少光在传播过程中受到环境的影响,采用波长为1 064 nm的激光照射器发射光斑。双相机系统中,可见光相机的响应波长范围是380~780 nm,红外光相机的相应波长范围为(1 064±1)nm。因此在红外光相机所成的像中除了光斑外几乎没有其他可以参照的标志点,而在成像过程中为了对光斑进行清晰成像,背景会变得更加模糊,无法获得合作目标的位置,因此无法使用现有的技术对红外光畸变图像进行单独的透视畸变校正。
针对这一问题,本文提出了一种基于空间变换的矫正方法。基本原理是利用两个空间的变换关系,将红外图像的矫正问题转化为在可见光空间下的矫正。基本方法是首先运用网格板标定法,确定可见光空间坐标与红外光空间坐标的坐标转换关系,即矩阵T2;然后运用目标识别技术,计算出可见光图像矫正矩阵T1,用于对可见光图像的矫正;最后计算出红外光图像矫正矩阵T3。
2.1 坐标变换矩阵
将红外光图像的矫正问题利用坐标变换矩阵使其在可见光的三维空间中完成,如图3所示。

图3 红外光斑图像空间变换示意图
实验所需的设备为:光源、标准网格板、平行光管、双路相机、计算机、相关软件,实验系统如图4所示。

图4 标准网格板标定系统
具体做法为利用可见光相机以及红外光相机分别对标准网格板进行静态采像,获取静态可见光图像以及静态红外光图像,采集到的图像如图5所示。

图5 网格板图像
在图5中,可以找到两条亮度最亮的相互垂直的直线,为标准网格板的中心线,然后以其中视场较小的图像为基准,以标准网格板中心线为依据,读取网格顶定点坐标,获取静态可见光图像上的多个可见光特征点;在静态红外光图像上获取与可见光特征点同一位置的红外光特征点;值得注意的是在两幅图像中读取的特征点坐标必须要一一对应。
根据可见光特征点以及红外光特征点确定坐标变换矩阵。
一般的,4对特征点即可得出坐标变换矩阵。特征点对越多,矩阵越精确。在实际应用中取10~15对特征点,设:

通过公式(2)即可解出T2,计算公式如下:
其中,(x,y)为原始图像像素坐标;(u=X/W,v=Y/W)为变换后的图像像素坐标。

2.2 双相机图像矫正
对于可见光靶板图像的矫正,采取的是合作目标检测法[8],对于合作目标的检测,如图6所示。

图6 合作目标检测流程图
由小孔成像原理可知:

其中,w和h为靶板的宽高;u和v为靶板宽高所占像素数;f为焦距;μ为相机的像元尺寸;L为相机到靶板中心的距离。则理想控制点坐标的计算公式为:

设可见光透视变换矩阵为:

矩阵的前两行实现了线性变换和平移,第三行用于实现透视变换。
则畸变矫正的过程为:

其中,(x,y)是畸变图像的像素点坐标;(x′,y′)是正视图像的坐标;m11,m12,m13,m21,m22,m23,m31,m32,m33是透视变换参数。
以上公式设变换之前的点是z值为1的点,它三维平面上的值是x,y,1;在二维平面上的投影是x,y;通过矩阵变换成三维中的点X,Y,Z;再通过除以三维中Z轴的值,转换成二维中的点x',y'。
将4对实际靶板的合作目标与对应的畸变图像上的合作目标点作为已知条件,可以解出透视变换参数[9],将上式改写为:
再将理想靶板图像和畸变靶板图像上的四个点对带入到以上公式中得:

将上式记做:

得:

从而可求得可见光透视变换参数,得到可见光透视变换矩阵T1。
设畸变的靶板图像为 f(x , y),矫正后的无畸变的靶板图像为g(x , y ),则:

利用公式

确定红外光透视变换矩阵T3。在根据公式:

求得矫正后的红外光斑图像。
从而实现对双相机系统的畸变矫正
根据上述过程,本文提出的畸变矫正方法如图7所示。

图7 畸变矫正示意图
大致步骤如下所示:
(1)通过标准网格板标定法计算坐标变换矩阵T2。
(2)对可见光靶板图像做合作目标点匹配算法,得到畸变前后合作目标在图像上的对应坐标关系,计算可见光透视变换矩阵T1。
(3)利用可见光透视变换矩阵T1和坐标变换矩阵T2计算出红外光透视变换矩阵T3。
(4)利用可见光透视变换矩阵T1对可见光靶板图像矫正;利用红外光透视变换矩阵T3对红外光斑图像矫正。
3 实验结果和讨论
双相机透视系统由激光照射器,可见光CCD相机、红外光CCD相机、计算机等组成。设备参数如表1所示。

表1 设备参数
用标准网格板选取的可见光图像特征点如表2所示。
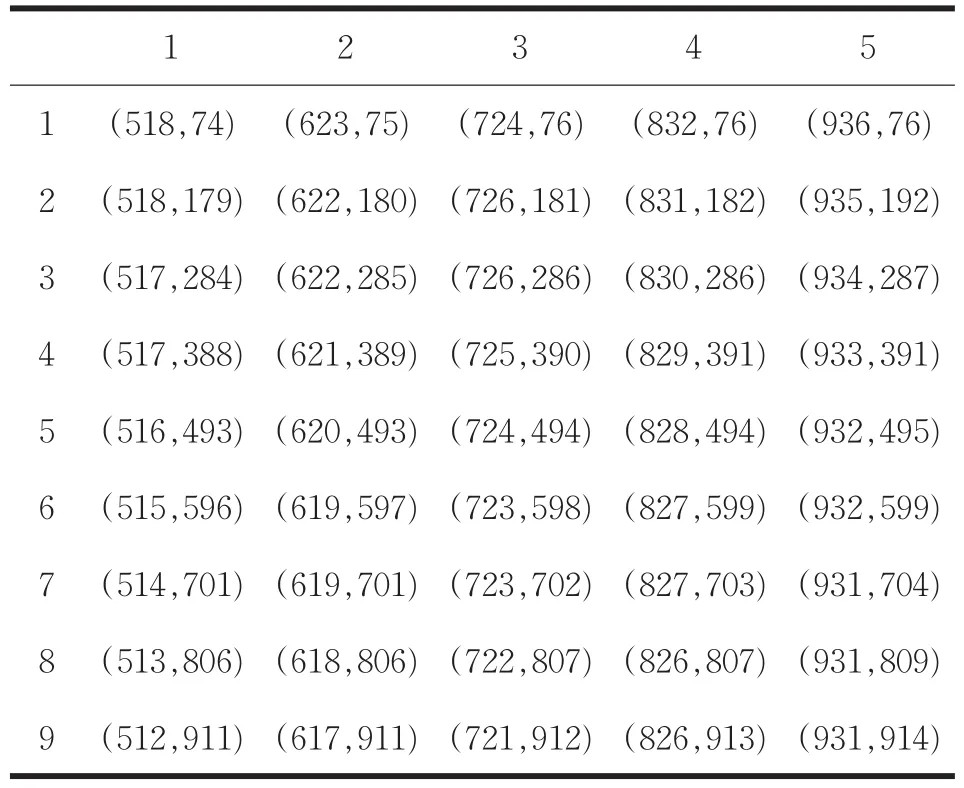
表2 可见光图像标准网格板特征点
用标准网格板选取的红外光图像特征点如表3所示。
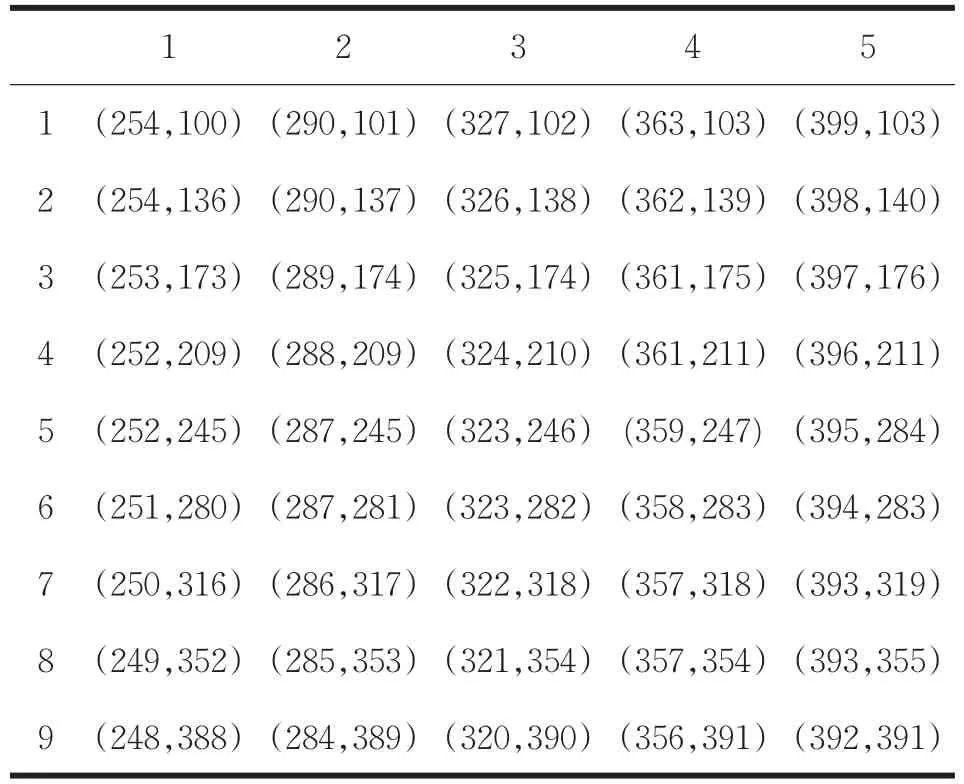
表3 红外光图像标准网格板特征点
由两幅标准网格板采集到特征点计算到的坐标变换矩阵为:
通过参数计算得出的理想靶板合作目标坐标点与识别得出畸变图像靶板合作目标点如表4所示。

表4 靶板图像畸变前后的合作目标点坐标
由这四对点计算出的可见光透视变换矩阵为:

通过公式(19)对可见光畸变图像进行透视畸变矫正,结果如图8所示。

图8 可见光图像矫正结果
比较两幅图像可以看出,矫正前图像中的图像具有较大的畸变,在校正后的图像上畸变得到了正确校正,说明该方法切实可行。
通过公式(16)计算出红外光透视变换矩阵T3,通过上述公式对红外光畸变图像进行透视畸变矫正,结果如图9所示。

图9 红外光图像矫正结果
比较两幅图像可以看出,校正前图像中的图像具有较大的畸变,在校正后的图像上畸变得到了正确校正,说明该方法切实可行。
4 结论
本文提出的一种应用于双相机系统的图像畸变矫正的方法,通过透视变换原理,对畸变的可见光图像进行有效矫正;采用标准网格板标定,计算出空间坐标变换矩阵,进而实现对畸变的红外光斑图像的矫正。实验表明:该方法矫正速度快,效果好,能够有效解决当可见光相机与红外光相机应用于同一系统时,对红外光斑的矫正难题,在后续的测量中能够有效的提高测量精度,减少因透视畸变引入的误差。
