基于麦克风阵列的罐装食品真空度在线检测
2019-11-16韩威周松斌刘忆森李昌刘伟鑫
韩威 周松斌 刘忆森 李昌 刘伟鑫

摘要:声音频谱峰值法被广泛应用于罐装食品真空度检测领域,但是当检测环境出现声音强度较大且与罐盖振动产生的声音的频段相同的噪声时,该方法可能做出误判。为此,提出声学阵列法:由麦克风阵列采集多路混合声信号,采用稀疏半非负矩阵分解从混合声信号中分离出干净的罐盖振动产生的声音,再利用声音频谱峰值法判断真空度是否合格。该文研究稀疏半非负矩阵分解的数学模型,并且推导求解稀疏半非负矩阵分解的迭代优化函数。实验结果表明,无噪声环境下,声音频谱峰值法和声学阵列法的真空度检测结果均准确,但在噪声环境下,声音频谱峰值法出现误判时,声学阵列法仍能做出准确判断。
关键词:麦克风阵列;稀疏半非负矩阵分解;声学检测;罐装食品真空度检测
中图分类号:TP391 文献标志码:A 文章编号:1674-5124(2019)07-0128-06
收稿日期:2018-09-10;收到修改稿日期:2018-11-08
基金项目:国家自然科学基金资助项目(61803107);广东省科技计划资助项目(20168090918061);广州市科技计划资助项目(201803020025)
作者简介:韩威(1987-),男,湖北荆门市人,助理研究员,博士,主要从事传感技术与在线无损检测技术研究。
通信作者:周松斌(1978-),男,广东潮州市人,研究员,博士,主要从事智能传感与检测、网络化测控、物联网方面的研究。
0 引言
三片罐、玻璃罐是食品行业中广泛应用的包装容器。为了防止食品过早变质,上述食品容器一般要求真空密封包装。然而在罐体成形、灌装、封盖以及搬运等环节,易出现罐体/罐盖卷边不良、灌装中空气未排净、罐破损等问题,导致罐装食品失去密封性、内部空气含量超标等真空度不合格现象。罐内真空度与罐内压力相关,因此一般通过检测罐内压力来判断真空度是否合格,主要有真空压差法、电涡流法、声学法。真空压差法[1]是采用真空表直接测量罐内气压值,主要用于政府质检部门抽检,属破坏性检测,不适用于在线无损检测。罐盖形状能反映罐内压力,因此基于电涡流法的罐装食品真空度检测技术原理[2-5]是:通过电涡流传感器探测罐盖的凹凸程度来感知罐内压力,从而判断罐内真空度是否合格。随着罐装食品需求和产量的提升,生产检测速度加快,传输线振动对电涡流传感器探测结果的影响越来越大。此外,部分罐装食品封盖的面积呈现小型化趋势,罐内压力对罐盖形变量的影响变弱。因此,电涡流法在罐装食品真空度检测领域的应用逐渐受限。
罐盖的自然振动频率与罐盖受到的压力相关,因此近年来,声学技术在罐装食品真空度检测领域被大量应用,并且声学技术基本不受传输线振动和罐盖面积大小的影响。基于声学法的罐装食品真空度检测技术原理[6-11]是:对罐盖施加激励,使其振动并产生声音,通过处理该声音信号来判断罐内真空度是否合格。目前一般采用声音频谱峰值法进行信号处理[6-9]:根据罐盖声音信号的频谱峰值的频率值是否在设定范围来判断罐内真空度是否合格。但是罐装食品检测现场可能出现机器轰鸣声、人声、撞击声等声音强度较大且与罐盖声音频段相同的噪声,使得计算得到的频谱峰值并不源于罐盖声音,从而导致该方法出现误判。
针对当前基于声音频谱峰值法的罐装食品真空度检测技术应对噪声的效果不佳,本文提出声学阵列法:由麦克风阵列采集得到多路混合声信号,采用稀疏半非负矩阵分解从混合声信号中分离出干净的罐盖声音信号,再利用声音频谱峰值法判断真空度是否合格。
1 罐装食品真空度声学检测原理
罐内真空度与罐盖受到的张力是相关的。当罐盖受到激励而振动时,可等效为边界固定的圆形膜振动模型[12]。设σ为罐盖单位面积的质量,罐盖受到的张力为T,r为罐盖半径,罐盖振动的自然频率[12-13]为其中,μn是一个常数,可通过贝塞尔函数表得到。
式(1)体现了罐装食品真空度声学检测原理:对于同种罐装食品,对罐盖施加相同的激励,如果罐内真空度不同,则罐盖的振动频率不同,振动产生的声音也不相同,因此,可通过处理罐盖振动产生的声音信号来判断罐内真空度是否合格。此外,从式(1)还可以看出,罐盖声音信号的频率成分比较集中。
2 基于声音频谱峰值法的罐装食品真空度检测
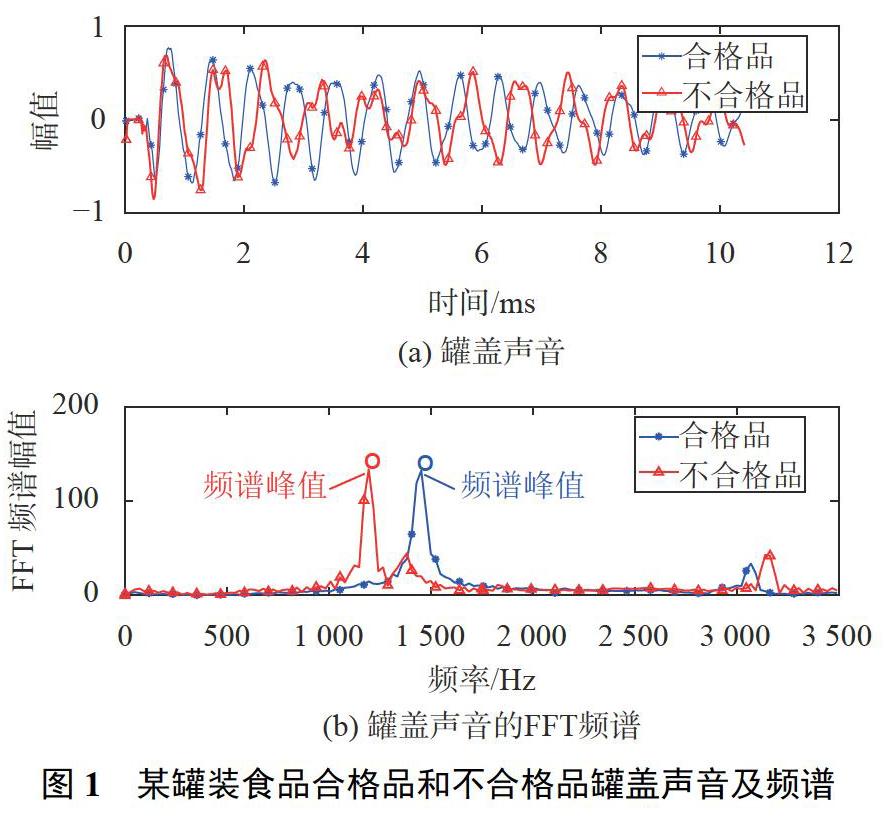
目前一般采用聲音频谱峰值法进行罐装食品真空度检测,具体过程是:采用单路麦克风采集罐盖振动产生的声音,计算该声音信号的傅里叶频谱,根据频谱峰值对应的频率值是否在设定范围来判断被检罐装食品真空度是否合格。图1所示为某种罐装食品的合格品和不合格品(泄露)在无噪声环境下的罐盖声音及傅里叶频谱。
从图1可以看出,合格品和不合格品的罐盖声音的频谱峰值所对应的频率值具有明显差异,声音频谱峰值法即是根据这种差异来判断罐内真空度是否合格。此外,从频谱图还可以看出,无论是合格品还是不合格品,其罐盖声音信号的频率成分均比较集中,主要表现为某一基波及其谐波的频率,符合罐装食品真空度声学检测原理。
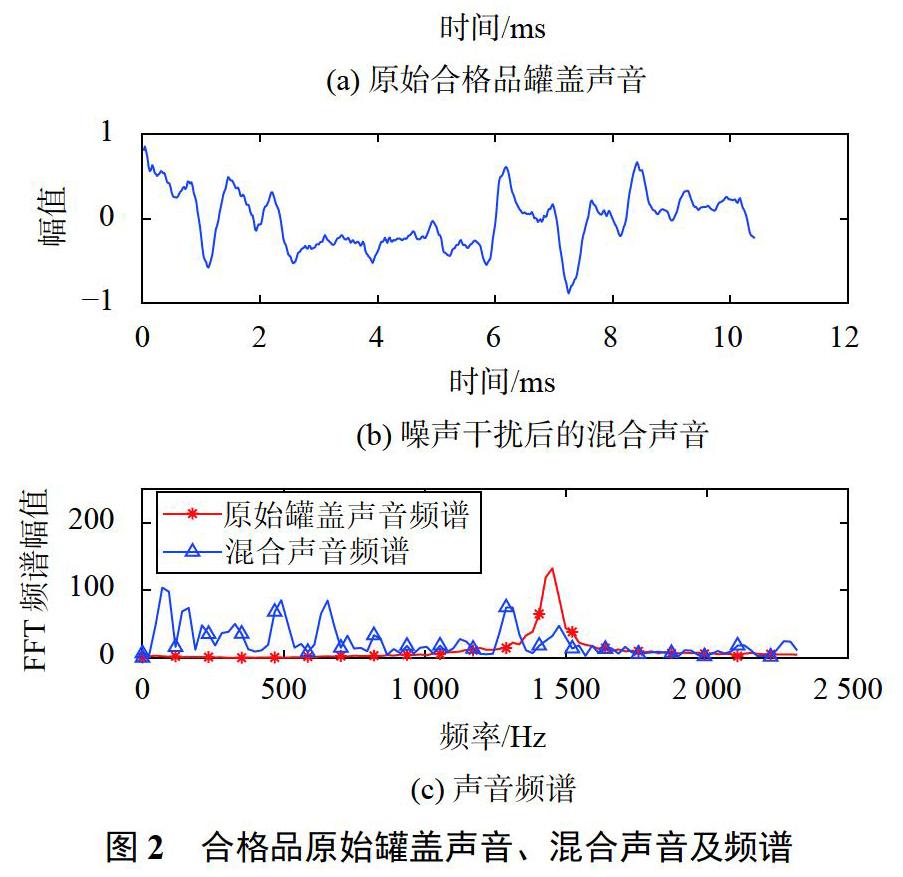
但是,由于罐装食品检测现场的声音环境较为复杂,可能出现声音强度较大且与罐盖声音频段相同的噪声,从而导致声音频谱峰值法出现误判。图2所示为合格品的声音信号受噪声(人声和歌声)污染后的混合声信号及频谱。
可以看出,合格品的罐盖声音被噪声污染后,混合声信号的频谱峰值并不来源于原始罐盖声音。此外,从图1(b)和图2(c)还可以看出,混合声信号的频谱峰值对应的频率与合格品和不合格品的罐盖声音频率均很接近。如果仍然采用声音频谱峰值法进行真空度判断,容易导致误判。
3 基于声学阵列法的罐装食品真空度检测
3.1 基于麦克风阵列的罐装食品真空度在线无损检测系统
图3所示为基于麦克风阵列的罐装食品真空度在线无损检测系统示意图,该系统工作原理为:当光电传感器检测到传送装置上有待检罐装食品后,处理控制模块通过电磁信号发生电路驱动电磁激励探头向罐盖施加电磁激励,使得罐盖振动,从而发出声音;由4路麦克风组成的阵列拾取罐盖声音及环境声音,并通过声音采集电路将声学阵列信号输入处理控制模块,处理控制模块首先采用稀疏半非负矩阵分解对混合声信号进行分离处理,获得干净的罐盖声音,再根据声音频谱峰值法判断待检罐装食品真空度是否合格。
在本文实验中,该系统声音采集频率48kHz,量化位数为32bit,4路麦克风的采集时长均为18.67ms。
3.2 基于稀疏半非负矩阵分解的声源分离算法
罐装食品真空度检测现场的声音混合模型,可表示为
X=FG(2)其中:X =[x1,x2,…,xm]∈RN×m是麦克风阵列采集的m路混合声音信号矩阵,xi=[xi(t),t=1,2,…,N]是第i(i=1,2,…,m)路麦克风采集的声音信号,N是声音信号长度;F=[f1,f2,…,fk]∈RN×k是k个未知的声源信号矩阵,fj是第j(j=1,2,…,m)个声源信号;G∈Rk×m是未知声源F(罐盖声音及噪声)的混合矩阵。在本文实验中,m=4,并假设k≤m。
由于混合矩阵G是非负的(G≥0),而时域声音信号F不一定是非负的,因此上述声音混合模型符合半非负矩阵分解(semi-nonnegative matrixfactorization,SNMF)的数学模型[14],从而可以按照求解半非负矩阵分解的方法来分离混合声音信号X,以获得干净的罐盖声音信号。
分析可知,罐盖声音是一种频率成分较集中的信号,具有被稀疏表示的可能性。因此,为了提升信号分离效果,对半非负矩阵分解施加了稀疏约束,称为稀疏半非负矩阵(sparse semi-nonnegativematrix factorization,SSNMF)。SSNMF是在式(2)的基础上,通过添加一个如式(4)所示的对称矩阵S∈Rk×k,实现对SNMF的稀疏约束。参考对非负矩阵分解(nonnegative matrix factorization,NMF)施加稀疏约束的方法[15],SSNMF被定义为
X=FSG(3)
其中,G≥0,矩阵S定义如下式中:I∈Rk×k——单位矩阵;
l∈Rk×1——元素都为1的列向量。
0≤θ≤1,控制着SNMF的稀疏性。当θ=0时,式(3)变为标准的SNMF。
因此,基于最小欧氏距离定义求解SSNMF的代价函数为
min Γ(F,G)=‖X-FSG‖2(5)argG≥0
采用梯度下降的迭代优化方法对SSNMF进行求解,求解推导过程如式(6)~式(14)所示。
对式(5)中的矩阵F和G分别求偏导,可得
令固定G,得到矩阵F的迭代更新公式
设有一个矩阵为V∈Rp×q(p,q),V+和V-分别表示V的非负数部分和负数部分,即有
V+=(|V|+V)/2(8)
V-=(|V|-V)/2(9)
V=V+-V-(10)
参照式(8)~式(10),有
XTF=(XTF)+-(XTF)-(11)
(FS)T(FS)=[(FS)T(FS)]+-[(FS)T(FS)]-(12)
从而,令,则有
因此,固定F,则得到矩阵G迭代更新式
式(14)表明,在矩阵G的迭代更新过程中,能确保G一直是非负的,满足SSNMF模型对矩阵G的非负限制。
按照式(7)和式(14)对矩阵F和G进行迭代更新,直到遇到迭代停止条件,最终得到的矩阵F即是声源信号矩阵。
在本文实验中,式(4)中θ的值为0.5,迭代停止条件是迭代次数到达100次或者Γ(F,G)<10-4。
4 罐装食品真空度检测实验
选择某种罐装食品的若干合格品和不合格品(泄露)作为实验样品。采用图3所示的罐装食品真空度在线无损检测系统,进行真空度检测实验,分别运用声音频谱峰值法和本文提出的声学阵列法进行声音数据处理和真空度是否合格判断。在本文实验中,两种方法检测结果准确的认定方式如表1所示。
4.1 无噪声环境下的检测实验
在无噪声环境下,随机选择样品进行真空度检测,声音频谱峰值法和声学阵列法的检测结果均准确。某次麦克风阵列采集到的合格品的声音信号及其频谱如图4所示。
通过无噪声环境下的样品真空度检测实验,测得合格品的罐盖声音的频谱峰值对应的频段为1450~1700Hz。由于罐装食品真空度是否合格是一個二分类问题,因此在实际检测中,如果被检罐装食品的罐盖声音的频谱峰值的频率不在合格范围,则就判定该被检罐装食品的真空度不合格。
4.2 噪声环境下的检测实验
在对样品进行真空度检测时,采用立体声音箱循环播放歌曲以模拟噪声,声音频谱峰值法会出现误判,而声学阵列法的检测结果均准确。某次当声音频谱峰值法出现合格品误判为不合格品时,麦克风阵列采集到的声音信号及其频谱如图5所示,经SSNMF分离处理后的声音信号及其频谱如图6所示。
从图5可以看出,噪声干扰后的4路混合声信号(图5(e)~图5(h))的频谱峰值的频率值均不在合格品的罐盖声音频段,因此,声音频谱峰值法出现误判。如图6(g)和图6(h)所示,频谱峰值的频率值与合格品的罐盖声音频率一致,说明采用本文提出的SSNMF对混合声信号进行分离,能分离出可用的罐盖声音。
表2所示为4路原始混合声信号(图5(a)~(d))及SSNMF分离后的4个声音信号(图6(a)~(d)),与无噪声环境下采集的某路罐盖声音信号(图4(b))的相关系数。从表中可以看出,分离信号与干净罐盖声音信号的相关性,比混合信号与干净罐盖声音信号的相关性更高,说明SSNMF有助于从噪声干扰的混合信号中分离出可用的罐盖声音信号[16]。
5 结束语
由于当前基于声音频谱峰值法的罐装食品真空度检测技术应对噪声的效果不佳,本文提出了声学阵列法:由麦克风阵列采集混合声信号,先采用SSNMF从混合声信号中分离出干净的罐盖声音信号,再用声音频谱峰值法进行真空度判断。给出了稀疏半非负矩阵分解的数学模型,并对其求解方法进行了推导。设计了一个基于麦克风阵列的罐装食品真空度在线无损检测系统进行实验,结果表明,当出现声音强度较大且与罐盖声音频段相同的噪声干扰时,声音频谱峰值法可能会出现误判,而本文提出的声学阵列法仍能从混合声信号中分离出可用的罐盖声音信号,对真空度是否合格做出准确判断。
参考文献
[1]张振祥,张立俊,陈连才,等.罐头真空度检测仪器的研究[J].现代商检科技,1996,6(4):5-7.
[2]刘南平,崔雁松,李佳,等.双控头电涡流法食品罐头真空度测量仪[J].传感技术学报,2005,18(1):129-131.
[3]刘南平,李文英,崔雁松,等.食品罐头真空度无损检测仪的研制[J].传感器与微系统,2004,23(12):40-42.
[4]干蜀毅,朱武,陈长琦,等.电涡流法检测罐头真空度的探头研制和仪器智能化[J].真空科学与技术,2002,22(5):326-328.
[5]GARCIAMARTIN J,GOMEZGIL J,VAZQUEZSANCHEZE.Non-destructive techniques based on eddy currenttesting[J].Sensors,2011,11(3):2525-2565.
[6]付江云,刘怡俊,陈靖宇,等.基于声学原理的啤酒瓶在线内压力检测系统设计[J].计算机测量与控制,2013,21(9):2362-2368.
[7]张业伟,徐全金,侯鹏飞.基于DSP的啤酒瓶封盖密封性在线检测系统的设计[J].智慧工厂,2011(7):121-122.
[8]陈靖宇,付江云,谢振南,等.基于实时滤波的瓶盖密封性测试系统设计[J].计算机测量与控制,2012,20(4):951-954.
[9]SUGIMOTO K,SUGIMOTO T,UTAGAWA N,et al.Thedefect detection algorithm that combined spectrum entropywith vibrational energy ratio for acoustic inspectionmethod[J].Acoustical Society of America Journal,2017,141(5):3831.
[10]金龙,朱振池,刘千令,等.基于激振声学的物体内部缺陷检测装置[J].电子技术应用,2015,41(2):45-47.
[11]ELFORJANI M,SHANBR S.Prognosis of bearing acousticemission signals using supervised machine learning[J].IEEETransactions on Industrial Electronics,2018,65(7):5864-5871.
[12]张海澜.理论声学[M].北京:高等教育出版社,2012:168-171.
[13]黄光周,蔡德全.食品罐头内真空度的无损检测[J].华南工学院学报(自然科学版),1987,15(4):13-17.
[14]CHRIS D,TAO L,MICHAEL I J.Convex and semi-nonnegative matrix factorizations[J].IEEE Transactions onPattern Analysis and Machine Intelligence,2010,32(1):45-55.
[15]ALBERTO P,CARAZO J M,KIEKO K,et al.NonsmoothNonnegative Matrix Factorization(nsNMF)[J].IEEE Transa-ctions on Pattern Analysis and Machine Intelligence,2006,28(3):403-414.
[16]周治宇,陳豪.盲信号分离技术研究与算法综述[J].计算机科学,2009,36(10):16-20.
(编辑:刘杨)
