机器人零位参数辨识及标定在实际中的运用
2019-11-16叶俊
文/叶俊
在机器人整机定位误差中,零位误差占据很大的比重,相关研究表明可达九成。机器人零位误差减轻或消除的前提是首先要对其进行参数辨识。零位误差的辨识基本可以分为两类,一类是算法辨识,一类是通过机器人处于零位位置时的集合关系辨识。两类方法在中,第一种方法辨识准确度高,但是其操作频繁,复杂程度高,辨识过程所需设备价格昂贵,因此经常用于科研工作中;第二中方法因其简单实用,常备机器人生产厂商所实用。但是此种方式也存在多次安装、加工定位孔和定位面,制造工装夹具等方法,例如辨识6自由度机器人至少需经过6次安装才可完成辨识工装。
基于以上两种方式,综合其优点,本文提出了一种基于双轴倾角传感器的零位表示方式,仅通过2次安装工作和人工辅助操作即可实现其零位参数辨识和标定。
1 机器人零位标定方法简述
1.1 标定对象基本情况
如图1所示,本文采用图1 机器人本体作为零位参数辨识和标定的对象,其上每个组件的基本信息如下:1代表底座,2-7代表轴,8和9代表倾角传感器,10和11分别代表参考面a和b,12代表和重力平行的虚线。根据几何知识,以参考面a和b作为投影面,将机器人的本体在其上进行投影,可得机器人水平面和底面之间的夹角。此模型的建立为后续机器人的零位标定打下了理论模型基础。
1.2 机器人的零位标定方法
根据文献[5]可知,机器人的零位值是由其处于初始运动状态时刻,各个关节角度值构成的一组参数。如果机器人的零位置存在偏差其运动精度必然会低,因此对其进行零位标定是必须的。另外,在对机器人进行运动建模时,根据约定俗称的理论,其初始位置是在其各轴正处在相对垂直或者水平时刻的位置。同时,倾角传感器是否安装正确是保证零位标定正确性的关键所在,其坐标系及倾角传感器的坐标系如图2所示。
图2中描述了倾角传感器的坐标系和本体机器人各轴的空间坐标关系。本方法与其他方法不同,传统的标定方法时先将轴1调整至0位,随后将传感器安装至1轴,使得传感器的坐标系和机器人的底部坐标系平行,由此,通过传感器的示数便可得到被检测传感器坐标系和工作台坐标系之间的相对倾角,记做X相对偏角和Y相对偏角,借助机床零点位置调整的思路,将此偏角设置为参考零点。同理,再降传感器用相同方式安装至其他各个轴。因此一共需要1/2/4/6这4次安装和调整便可实现机器人的零位标定,比传统方式的6次安装降低了2次,提升了标定效率。此法虽好,但是需要解决参考零位点和3-6轴的零位辨识。
2 机器人参考零点和2轴零位点获得
2.1 参考零点
参考零点其本质是参考零位角度,参考零位角的定义是指机器人的基础坐标系O和工作台坐标系之间的夹角,本文假设坐标系与X方向和Y方向夹角分别为α和β。其简图如图3所示。
自图3可知,当零点位置处于1轴位于零位时,机器人进行正投影,此时,大臂调整至垂直位置。当固定2-6轴位置不变时,机器人本体绕轴1旋转半轴,大臂位于新位置,并且与竖直方向夹角为λ,且转动前后满足式(1)。

因此,当轴1位于零点位置,2轴位于-λ/2时,轴2位于零点位置,此点便是双轴倾角传感器的零点参考位置。
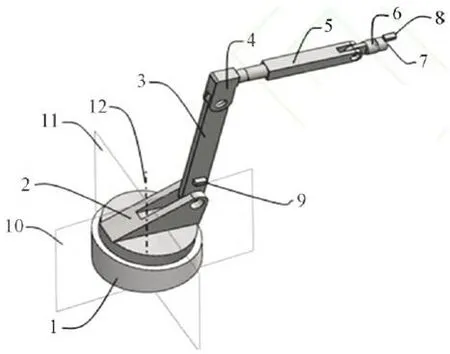
图1:标定对象及标定方法
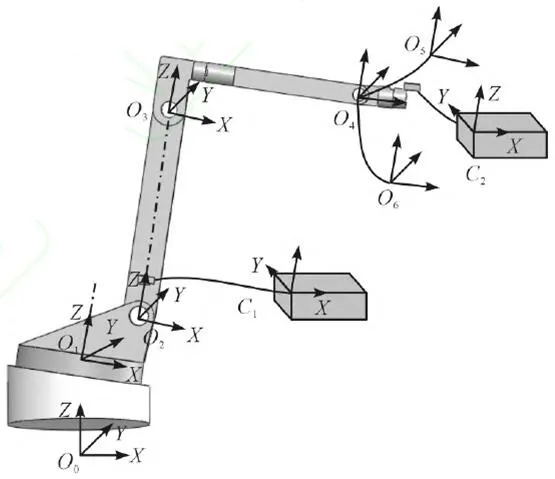
图2:机器人及倾角传感器的坐标系图
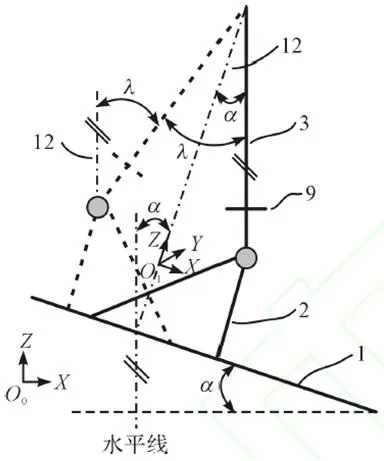
图3:机器人参考零位简图
2.2 其他轴的零点位置辨识
根据前文,获得传感器的参考零点位置以后,将传感器放置与6轴,由转动关系可得到矩阵,此矩阵可通过3-6轴径旋转得到,具体计算公式如式(2)。
同时,传感器相对机器人基座的变换关系可通过RPY角的旋转变换实现,具体计算公式如式(3)。


假设两个角度分别存在误差,记为△β和△γ。其中△β和△γ分别如式(4)所示。

3 结论
由于机器人在零位标定问题严重影响其运动精度,并且现如今各类标定和零位参数辨识方法操作繁琐且标定设备费用昂贵,基于以上原因,本文建立了机器人零位参数模型,提出了一种可以快速实现零位标定的方法,并介绍了其基本原理,对采用此方法后需要解决的零位参数辨识等问题进行了研究。经过实际运用可知,此方法可有效提升机器人的零点位置对准精度,提升了零点位置标定所耗费的时间,值得借鉴和推广应用。
