天线反射体的空间几何关系精密测量
2019-11-15张新盼任鹏飞吴昕颖刘亮
张新盼 任鹏飞 吴昕颖 刘亮

摘要:采用数字工业摄影测量技术对天线反射体的空间几何关系进行精密测量和调整,并应用公共点坐标转换方法统一测量和调整过程中的坐标系。公共点坐标转换准确度可达±0.1mm。天线主反射面表面准确度优于±0.26mm,副反射面中心位置准确度优于0.7mm,高度位置准确度优于0.5mm时,某13m口径抛物面天线接收和发送频率为f=19.6GHz的Ka频段电磁波信号,天线反射体的电性能测试满足指标需求。与传统的天线反射体测量和调整方式相比,省去通过天线接收卫星信号扫描方向图调整副反射面姿态的大量工作,具有高准确度、高效、高可靠性等特点。
关键词:数字工业摄影测量;天线反射体;空间几何关系;公共点坐标转换;表面准确度
中图分类号:TM934 文献标志码:A 文章编号:1674-5124(2019)05-0054-06
收稿日期:2018-04-16;收到修改稿日期:2018-06-20
作者简介:张新盼(1988-),男,河南开封市人,工程师,研究方向为三维空间几何大尺寸测量、数字工业摄影测量。
0 引言
在国内外抛物面反射天线测量领域,天线主反射面表面准确度的测量研究受到广大利研工作者的关注,而天线反射体的主反射面、馈源、副反射面等空间几何关系统一测量尚未得到广泛关注。表面准确度是表征实际天线反射面偏离理论曲面的程度,通常用各测量点法向偏差的均方根RMS值来表示[1-4]。
数字工业摄影测量系统在天线反射体的空间位置关系测量中具有高准确度(相对测量准确度可达1/12000)[5],非接触式、自动化、便携式测量的特点,并且根据天线反射体的工作角度需求,在天线任意俯仰角度实施测量[6],消除重力变形对天线反射体的空间几何关系影响。目前国内外商业化数字工业摄影测量公司主要有:美国GSI公司V-STARS系统、德国AICON 3D公司DPA-Pro系统、郑州辰维科技股份有限公司MPS系统。
该文进行天线反射体的空间几何关系精密测量和调整,通过电性能测试验证了方法的准确性和可靠性,探索了天线反射体精密测量的新方案。
1 数字工业摄影测量简介
1.1 测量原理
数字工业摄影测量是近景摄影测量在工业测量领域的应用,简称摄影测量,由单台或多台高分辨率的量测型相机对被测物在不同位置拍摄,得到两张以上二维影像,经计算机处理软件图像匹配、光束法平差后得到准确的三维坐标值。
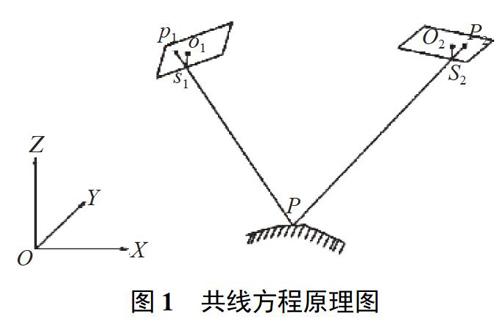
摄影测量原理同经纬仪测量系统一样均是三角形交会法,因为相机在不同的位置拍摄,无法像经纬仪一样精确互瞄,故采用光束法平差定向技术,即通过不同位置的相机对多个目标同时测量产生的多余观测量,来解算相机间的位置和姿态参数[7]。基本的数学模型是共线方程,即摄影时物点P、镜头中心s,像点P这3点位于同一直线上,如图1所示。
(x,y)为像点在像平面坐标系中的坐标,(x0,y0)为像主点在像平面坐标系中的坐标,f为相机主距,(X,Y,Z)为物点在物方空间坐标系中的坐标,(XS,YS,ZS)为镜头中心在物方空间坐标系中的坐标。
从多个摄站对目标进行拍摄,即可获取被测物体的多个立体像对,从而构成多目立体视觉。设物方点Pi由j个摄站(j条光线)相交,如图2所示,则共有j个共线方程。另外,根据文献[7]对像平面坐标不严格为零和物镜畸变等干扰因素的研究,这些因素使得各像点在像平面上相对其理论位置(x,y)也存在偏差(△x,△y)。因此實际像点的共线方程式为:
(xij,yij)为像点在像平面坐标系中的坐标,(x0j,y0j)为像主点在像平面坐标系中的坐标,f为相机主距,(X,Y,Z)为物点在物方空间坐标系中的坐标,(XS,YS,ZS)为镜头中心在物方空间坐标系中的坐标。
1.2 系统组成
摄影测量系统洗用德国AICON 3D公司的DPA-Pro测量系统,标称测量准确度为5μm+D·5μm/m(D为摄影距离,单位m)。
测量相机:高准确度、高分辨率的量测型数字化相机;软件系统:摄影测量系统的核心,经过图像输入、图像识别、图像拼接光束法平差提取测量点坐标值;编码标志:带有特定数字序列的回光反射材料,图像识别后,实现图像间的自动拼接;单点标志:单个的回光反射材料,测量目标点上的测量标志;基准尺:具有高准确度的固定长度标尺,为摄影测量提供长度基准;定向尺:实现摄影测量的概略定向,为测量系统提供物方坐标系。
2 测量实施
2.1 测量方案
天线主反射面由4圈140块面板拼接组成,共560个调整点,在主反射面调整螺杆对应的单块面板法向位置粘贴单点标志作为测量点。
主反射面每间隔一块面板粘贴编码标志,为了保证独立拍摄副反射面的图像和整个测量工程的图像成功拼接,在副反射面上粘贴8张编码标志,如图3所示。
副反射面是旋转成型的抛物曲面,和其背面铸造而成的加强环固定连接成一体。副反射面和加强环的几何尺寸由机械加工保证,整体通过螺杆和副反射面调整机构连接。因此,副反射面姿态的测量、调整以其背部加强环为测量对象,在加强环上端面粘贴单点标志作为副反射面高度位置测量点,加强环内侧圆周粘贴单点标志作为副反射面中心O2位置测量点,如图4所示。
以馈源喇叭法兰为基准建立天线系统坐标系O-XYZ,如图5所示,法兰上端面为基准平面,法兰圆周中心在基准面投影点O为坐标系原点,Z轴垂直基准面竖直向上,X轴指向天线主反射面正上方,Y轴由右手坐标系准则确定。
馈源支套上分布若干公共点,如图6所示,通过公共点坐标转换的方法,将每次的测量数据转换至同一坐标系O-XYZ下,保证测量基准一致。
公共点要求均匀分布,以确保转换参数解算稳定和解算准确度高[8-9],根据文献[10]、文献[11]可知公共点数目达到6个以后,增加公共点数量对转换参数解算稳定和解算准确度提高无显著影响。
2.2 数据处理
在第1次测量时中建立天线系统坐标系口-XYZ,后期每次测量数据,均通过公共点坐标转换的方法,转换至同一坐标系下。
坐标转换准确度的评价方式通常是利用转站前后公共点坐标差值的均方根来进行评价12-13]。公共点转换参数和点偏差统计,如表1所示,公共点转换准确度δGG=0.1mm,公共点转换偏差统计,如表2所示。
经典的天线主反射面表面准确度计算方法有曲面自由拟合法、公共点转换法、CAD面型转换法[1-3]。曲面自由拟合是按照所采集天线各测量点进行最小二乘拟合得到曲面,准确度最高,但是没有顾及天线设计的理论位置,天线实际曲面已经偏离了理论曲面,结果是不可信的;公共点转换法是主反射面上有已知理论坐标的公共点,通过公共点转换方法获取测量点在理论曲面坐标系坐标值,由于公共点加工误差影响,其计算结果最差;CAD面型转换法以天线理论CAD模型为基准,将所采集天线各测量点拟合到天线理论曲面,所得结果能够反映天线实际曲面与天线理论曲面的关系[1-3]。
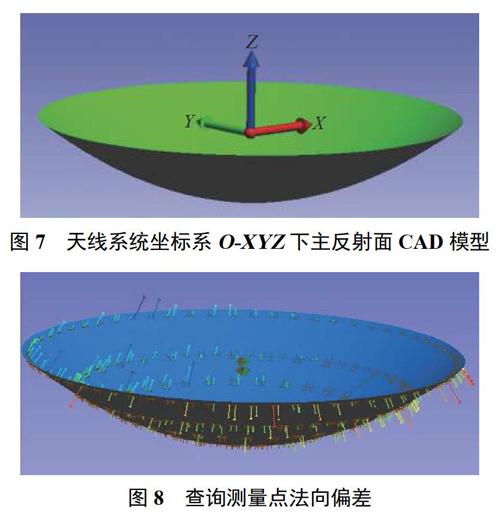
上述经典计算方法,仅考虑天线主反射面的表面准确度计算,未顾及天线反射体的空间几何关系。以馈源为基准建立天线系统坐标系口劣路{并创建在此坐标系下的天线理论曲面CAD模型,如图7所示。采集实际天线测量点在此坐标系下的坐标值,直接查询测量点至模型的法向偏差,其均方根RMS值是主反射面的调整准确度δ1,各点法向偏差即为调整量,如图8所示。
确保表面准确度达到最优的同时,保证天线主反射面的机械轴和天线系统的电轴一致。经过5次测量、4次调整,主反射面调整准确度δ1=0.18mm,在摄影距离6~9m的位置拍摄,故测量准确度占2簇±0.05mm。由Leica AT401激光跟踪仪测量系统测量单块面板表面准确度为δ3≤0.15mm,测量距离为5m,故测量准确度为δ4=±0.05mm。则天线主反射面表面准确度殊由线性误差传递公式得:
根据结构设计,副反射面加强环上端面至馈源法兰基准面高度为2252.15mm,因此在天线系统坐标系O-XYZ下,加强环中心坐标值为(0,0,2252.15)。副反射面调整结果如表3所示。
综上可知,主反射面表面准确度优于0.26mm,副反射面中心位置准确度优于0.7mm,高度位置准确度优于±0.5mm。
3 电性能测试
完成天线主反射面、副反射面姿态调整后,在天线系统工作角度接收卫星信号初始方向如图9所示:方位方向图显示主瓣电平值M1=-33.92dB,左旁瓣电平值D1=-19.07dB,右旁瓣电平值D2=-19.32dB,左右旁瓣电平值相差0.25dB,说明方位方向图测试满足指标需求,副反射面相对于主反射面左右对称;俯仰方向图显示主瓣电平值M1=-33.94dB,左旁瓣电平值D2=-16.81dB,右旁瓣电平值D2=-22.88dB,左右旁瓣电平值相差6.07dB,说明俯仰方向图测试满足指标需求,副反射面相对于主反射面上下不对称,并且副反射面偏向主反射面下方。
副反射面向天线上方平移1.5mm后,方向图如图10所示。
方位方向图显示主瓣电平值M1=-35.14dB,左旁瓣电平值D1=-18.90dB,右旁瓣电平值D2=-19.20dB,左右旁瓣电平值相差0.30dB;俯仰方向图显示主瓣电平值M1=-35.00dB,左旁瓣电平值D1=-17.77dB,右旁瓣電平值D2=-20.62dB,左右旁瓣电平值相差2.85dB。说明:副反射面经过微调后方位、俯仰方向图测试均满足指标需求,而且方位、俯仰左右旁瓣电平差值反应副反射面空间位置满足需求。
4 结束语
探索数字工业摄影测量技术在天线反射体的空间几何关系精密测量和调整中的应用,在13m口径天线系统测试f=19.6GHz的电磁波信号时得到验证,为大口径、高频段的天线反射体精密测量提供一种高效、高准确度、可靠性高的测量方案。
参考文献
[1]李宗春.天线测量理论、方法及应用研究[D].郑州:解放军信息工程大学,2003.
[2]李宗春,李广云,金超.面天线检测数据处理方法的探讨[J].宇航计测技术,2003,23(2):12-19.
[3]李广云,李宗春.天线几何量测量理论及其应用[M].北京:测绘出版社,2009.
[4]张新盼.应用数字工业摄影测量实现天线反射体姿态恢复[J].宇航计测技术,2017,37(6):16-21.
[5]冯其强,李广云,李宗春.工业数字摄影测量系统及应用[C]//《测绘通报》测绘科学前沿技术论坛摘要集.北京:测绘出版社,2008.
[6]王保丰,李广云,李宗春,等.应用摄影测量技术检测大型天线工作状态的研究[J].中国电子科学研究院学报,2006,1(5):435-439.
[7]黄桂平.数字近景工业摄影测量关键技术研究与应用[D].天津:天津大学,2005.
[8]赵宝锋,张雪,蒋廷臣.坐标转换模型及公共点选取对转换成果精度的影响[J].淮海工学院学报,2009,18(4):54-56.
[9]王玉成,胡伍生.坐标转换中公共点选取对于转换精度的影响[J].现代测绘,2008,31(5):13-15.
[10]周跃寅,潘国荣.公共点分布对坐标转换精度的影响[J].大地测量与地球动力学,2013,33(2):104-109.
[11]张皓琳,林嘉睿,邾继贵.三维坐标转换精度及其影响因素的研究[J].光电工程,2012,39(10):26-31.
[12]郭英起,唐彬,张秋江,等.基于空间直角坐标系的高精度坐标转换方法研究[J].大地测量与地球动力学,2012,32(3):125-128.
[13]杨凡,李广云,王力.三维坐标转换方法研究[J].测绘通报,2010(6):5-7.
(编辑:刘杨)
