基于三维激光点云的古建筑建模应用
——以福建省古田会议会址为例
2019-11-14
(1.福建信息职业技术学院建筑工程系,福建,福州 350001;2.福建经纬测绘有限公司,福建,福州350001)
古建筑作为重要文化遗产蕴含了古人的思想和智慧,具有历史、文化、科技等多方面的价值,对其修缮、保护十分重要[1-2]。在历经岁月沧桑的保存过程中,由于人为和自然力的破坏,使得我国古代建筑遭受损害、破坏甚至毁灭[3]。如何在不损伤建筑的前提下,让文物长久保存成为刻不容缓的问题。 三维激光扫描采用非接触式的测量方式,具有快速、精确、多方位、“所见即所得”等特点,将所测量的对象进行1∶1的实景三维建模[4]。目前三维激光扫描技术按照测距原理主要分为相位式和脉冲式两种,相位式扫描仪测程短、测距精度高、速度快,主要用于文物保护、建筑遗产的变形监测、考古测量等,脉冲式扫描仪测程长、精度随着射程增加降低、速度慢,主要用于电力巡检、地形测量等。本文以福建省古田会议会址三维重建为依托,采用德国Z+F公司相位式三维激光扫描仪IMAGER 5010C,结合仪器配套的随机后处理Laser Control软件以及Autocad、Photoshop、3DSMax等软件,建立了精细的三维数字模型,实现了古建筑有效数字化保存,为后续的修复保护提供了详尽的数据支持。
1 三维重建方案
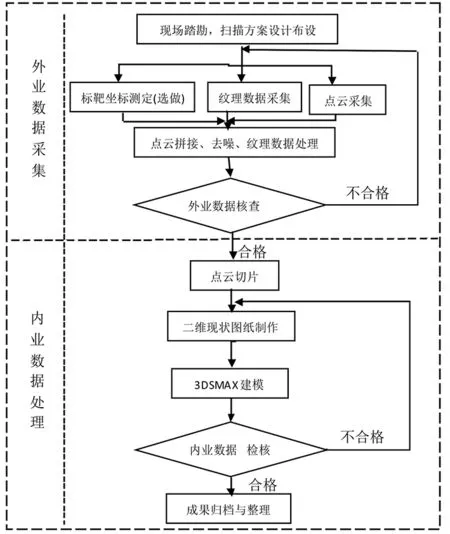
图1 三维重建技术流程 Fig.1 3D reconstruction technology scheme
古田会议会址的三维重建采用地面三维激光扫描技术获取高精度的点云数据以及利用高清数码相机获取纹理数据,通过对点云数据和纹理数据的内业处理,绘制平、立、剖的二维现状图以及构件大样图,并建立高精度、真实感的三维数字化模型。如图1所示三维重建的技术流程主要分为3个部分:1)外业数据采集。主要包括扫描站的布设、标靶的布测、设站的扫描、纹理图像的采集。2)数据的处理。主要包括点云的去噪、冗余数据的剔除、图像数据的处理以及点云拼接。3)三维模型的制作。对处理后的点云数据绘制二维现状图,采用3DSMax等软件进行精细化三维模型的制作。
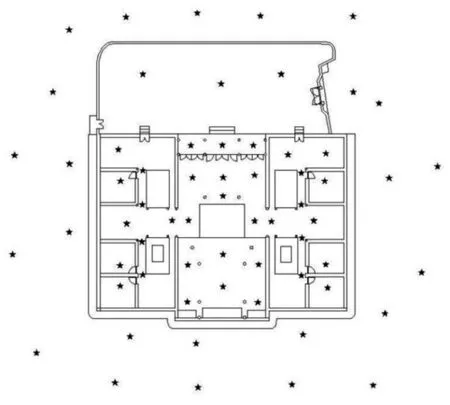
图2 外业扫描测站分布示意图Fig.2 Distribution schematic diagram of field scanning stations
2 三维重建的实施过程
2.1 外业数据的采集
2.1.1 踏勘及扫描方案设计
在三维激光点云数据采集之前,需进行现场的踏勘,制定外业数据采集方案。根据会址的空间结构特点、地理位置及周边环境,确定作业范围,制定扫描计划。会址整体结构对称分布,由前后厅和左右厢房组成。会址庭院空阔,依次为前院、中门、下厅、正厅。左右两侧为厢房,步入中门,正厅是古田会议会场,古建筑内部外业设计扫描站预计39站,建筑外部测站根据实地情况均匀分布,会址每天大量的游客参观,选在夜晚进行外业扫描,最终扫描完共设置64站点。
2.1.2 点云数据的获取
三维激光点云采集方法大致可分为标靶法、后视定向法和基于点云自动拼接的数据采集法[5],3种不同的扫描方法各具优缺点。古田会议会址四周具备良好的通视条件,因此采用标靶法进行数据采集,简单的数据处理,即可得到较高的配准精度。仪器检定精度要求如下:单点点位精度≤±2 mm(25 m范围内);形成模型表面精度≤±2 mm (50 m范围内)。数据采集的工作流程分为标靶的布设以及设站扫描两个步骤。

图3 一测站外业原始点云Fig.3 Primitive point cloud of one survey station
标靶按类型可分为磁质标靶、球形标靶和纸质标靶。本项目外业点云采集采用球形标靶与纸质标靶相结合。标靶布设时应符合以下要求:1)各测站之间必须满足3个以上公共标靶,每一扫描站的标靶个数不少于4个。2)标靶与扫描仪之间的水平距离不宜超过20 m。3)每个测站的标靶摆放要均匀分布,连续3个标靶之间连线构成的最大角度不宜大于150°。扫描站布设主要技术要求如下:1)测站间距不大于50 m,当扫描墙面或者扫描对象单一时可适当增加测站间距。2)点云必须采集完全,不能漏采,扫描站扫描范围应覆盖整个扫描对象,通视困难或线路有拐角时应适当增加扫描站。本项目共获取了33.3 G的原始点云。图3为一测站的原始点云。
2.1.3 纹理数据的获取
纹理数据采集是十分重要的工作,影像质量的好坏直接关系到三维模型表面贴图的质量。本项目采用尼康D7000高清数码单反相机进行纹理数据的获取。采集时要选择保持光线较为柔和,均匀的天气,正射的方式进行拍摄;逆光,光线过暗、能见度低的不宜拍摄。纹理颜色有特殊要求要使用色卡配合拍摄。相邻图像之间保证不小于30%的重叠区域,影像覆盖全面,有重复单元的表面拍摄局部,无重复单元的表面应拍摄完整表面。结构复杂或无法正视拍摄的表面,应进行多角度拍摄,避免影像数据的丢失,利用图像处理软件进行拼接。采集的同时做好影像采集分布图,影像信息较多时,可进行编号的处理。
2.2 内业数据的处理
2.2.1 点云数据的处理

图4 配准后的点云数据Fig.4 Point cloud data after stitching
点云的数据处理主要包括点云拼接、点云去噪等处理,以得到建筑物的完整点云数据。
1)点云拼接。每一个测站扫描的点云数据是测站独立的坐标系,需要将各测站的点云数据拼接到统一的坐标系下。点云配准通常利用Besl和Mcaky提出的ICP算法实现相邻站的自动拼接[6]。采用随机后处理Laser Control软件数据拼接模块,导入点云数据,并对标靶球编号,利用相邻测站的公共标靶进行各站点云拼接,将多站数据拼接成统一坐标系的点云数据(图4)。最终点云配准的平均误差为1.5 mm。
2)点云的去噪。在数据采集时,由于周围环境、人为等因素影响,不可避免的会扫描到建筑物以外的物体,造成多余的点云数据称为噪声[7]。对这些无效点云数据需删除,如脱离扫描对象的异常点、孤立点等通常采用滤波或者人机交互的方式进行降噪处理,保证数据的有效性。
2.2.2 纹理数据的处理
为了获取真实感的三维模型,需要对采集的纹理原图影像通过Photoshop软件进行处理,主要包括纹理图像的裁剪、纠正、比例变换、平色调、去杂点、拼接等,经过处理后纹理照片应色调均匀,自然美观,真实反映实际材质的图案、质感、颜色及透明度和年代特征。在采集过程中要尽量减少视角或镜头畸变引起的变形,使纹理数据不含有建模影像以外的其他影像[8]。同一细节层次模型的纹理具有相近的分辨率。作照片拼接时,应保证图像细节表现清晰,无拼接镶嵌缝隙。
2.3 成果制作
2.3.1 二维现状图的制作
按照古建筑物绘图规则与精度要求,依据拼接后三维激光点云数据,进行古建筑物平面图、剖面图、立面图、大样图等二维图纸的制作。在Z+F Laser Control软件中利用拼接好的点云数据视图切出不同厚度的点云并导出CAD的绘图交换格式Dxf文件。点云切片应满足两点要求:1)参考平面必须平行或垂直于建筑中轴线或者建筑正厅的地面。2)切片厚度不宜过厚,应根据实际需要分层切片。CAD中根据点云切片制作二维现状图,对已切片的点云根据扫描对象的结构特征绘制特征线,根据点云数据切片制作的特征线生成二维现状图及构件大样图(图5-图7)。
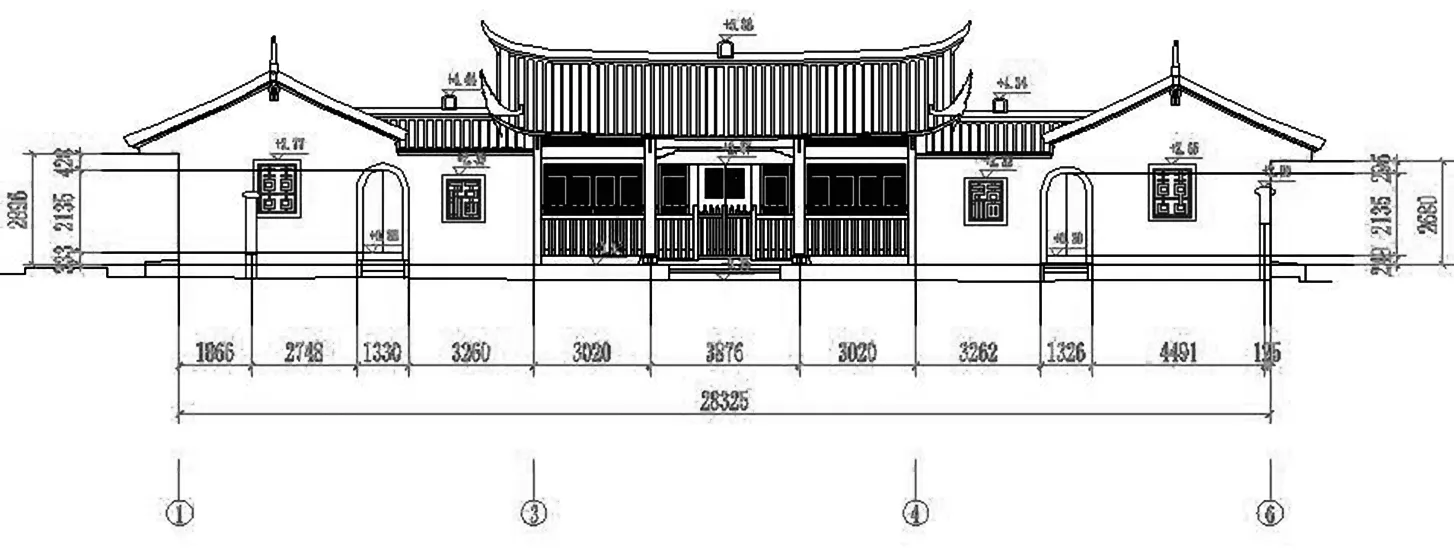
图5 正立面图(单位:mm)Fig.5 Front elevational drawing(unit: mm)
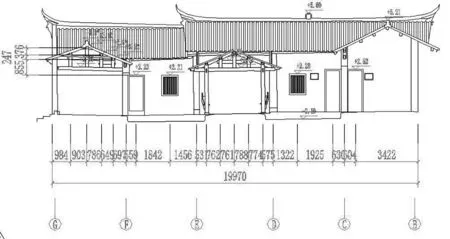
图6 剖面图(单位:mm)Fig.6 Sectional drawing(unit: mm)
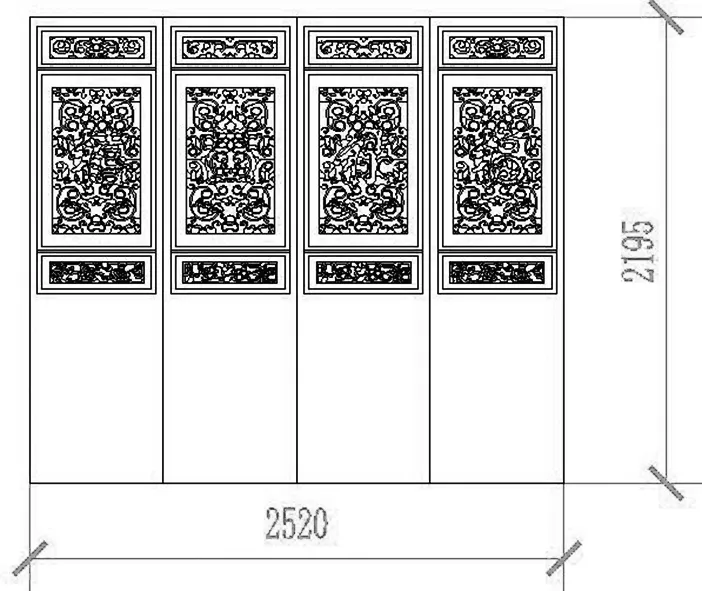
图7 构件大样图(单位:mm)Fig.7 Component details drawing(unit: mm)
2.3.2 三维模型的制作
三维模型制作是利用3DSMax软件以及生成的平面图、立面图、剖面图、点云数据等进行交互式建模。三维模型制作分为几何模型的制作和纹理贴片两个步骤。三维建模后添加树木、灯光等场景信息,利用软件的视频制作功能,制作三维展示视频。

图8 桌子的三维重建模型Fig.8 3D reconstruction model of table
1)几何模型。在3DSMax软件中,导入古建筑二维现状图纸数据的Dxf数据,根据建筑各面所包含的尺寸数据利用软件的挤出功能,拉伸出建筑实体模型,将模型转换成可编辑多边形并进行表面的拉伸制作,构建出实体模型。对于重要的部分细小部件或建筑附属设施,如图8所示桌子、椅子等现场量取尺寸,内业结合点云数据的方式建立。对于不重要但是需要在模型中表达的可从点云中量取尺寸建立模型,建模的过程中面数应尽量少。
2)纹理映射。纹理映射的主要目的是建立三维几何模型与影像之间的纹理关系,即建立几何模型上各三角形顶点与影像像素之间的对应关系[9]。利用3DSMax软件中“多边形编辑”功能下图层进行贴图,每个模型根据处理后的正射化的纹理数据映射到三维实体,生成具有真实感的三维实体模型,确保纹理数据与几何模型的匹配。图9-图11为古田会议会址的三维重建模型的效果图。
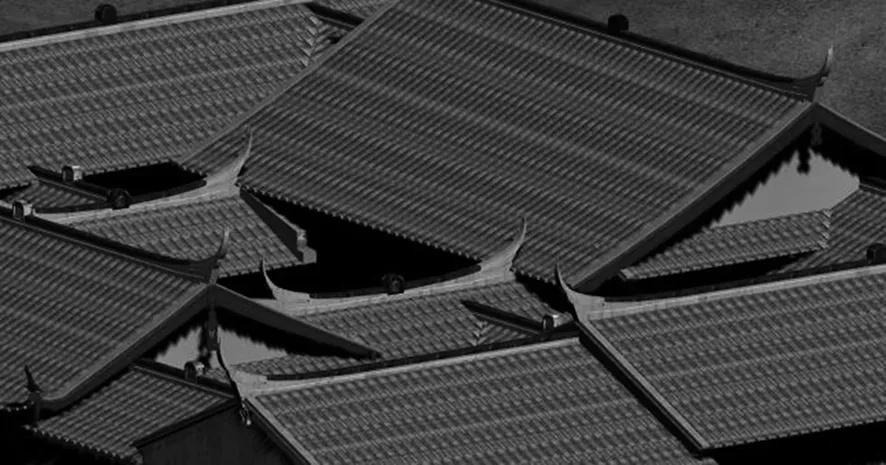
图9 屋顶结构图Fig.9 Roof struction drawing

图10 内部结构图Fig.10 Internal struction drawing
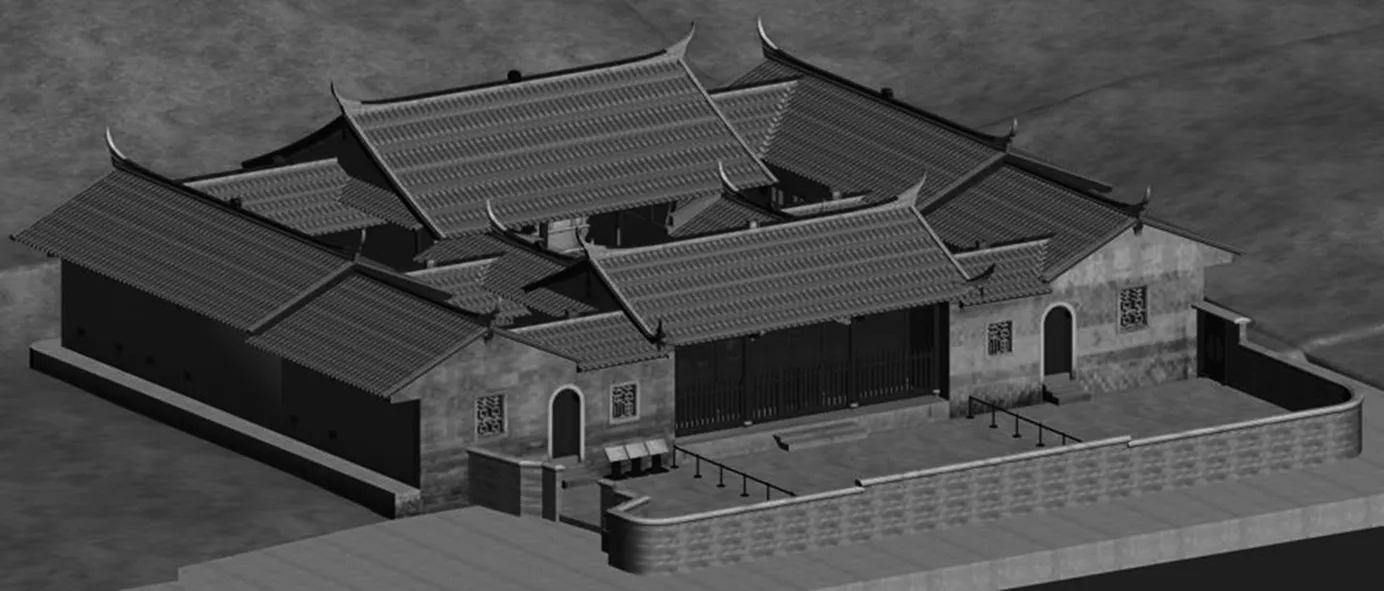
图11 古田会议会址三维重建模型Fig.11 3D reconstruction model of Gutian Meeting Site
3 结语
本文以福建省古田会议会址为例,详细阐述基于三维激光点云的古建筑精细化的三维重建过程,充分发挥了三维激光扫描技术的优势,全面准确的获取该建筑物精细三维空间数据,为古建筑的三维建模提出了新的思路。本项目所建立的数字档案已被福建省文保中心留档,永久性的保存古建筑的数字信息,若日后会址发生自燃或者人为的破坏,可利用建立的数字资料,精确的恢复其原貌。古文化遗产的三维建模工作,对于保护文物资源、展示悠久的历史文化具有极其重要的现实意义。本次三维重建的技术流程采用基于激光点云的手工建模的方式,今后将重点结合摄影测量技术、GIS技术探索全自动交互式的建模方式,以提高建模的速度和质量更好的推动古建筑高精度的数字化发展。
