基于多传感器信息融合的物流机器人导航定位技术研究
2019-11-13吴吉明
吴吉明
(福建船政交通职业学院,福建 福州 350007)
随着互联网技术的不断发展,智能机器人的应用领域更加广泛,很多智能机器人被应用到各种类型的企业中,并且以集群的方式出现,由多个机器人组成,协助工作,共同完成制定的任务。机器人工作中所处的位置是保证机器人能够高效工作、协同工作的基础。保证物流机器人能够准确的完成分配,调度任务的关键是定位准确、实时操作。在日常的工作、生活中,GPS定位系统广泛地应用到导航、定位。GPS信号也会受到环境的影响,室外GPS的信号要比室内好很多,室内由于受到建筑物、空间等环境的影响,阻碍信号,严重的会出现丢失的情况。所以,GPS定位系统并不适用于室内环境。针对物流机器人定位系统有两种定位方法,一种是基础图像处理的定位方法,另一种则是多传感器信息融合的定位方法,这两种方法所需要用到的传感器包括BLE、RFID、WIFI、运动传感器等等。BLE的应用比较广泛,BLE属于低功耗、低成本的蓝牙,应用非常广泛。BLE信号在使用的过程中也会受到材料、设备、技术、结构环境的干扰,这些干扰因素都会导致数据出现不稳定的情况。因此物流机器人在使用的过程中依然存在定位不准确、信号不稳定等方面的问题。本文结合物流机器人在工作中的移动距离与BLE定位技术进行深入研究,不断提高机器人工作定位的准确性。
1 多传感器信息融合的基本概念及特点
多传感器信息融合主要是利用计算机技术对传感器系统进行编程,按照相关的算法进行系统处理与管理,针对系统进行分析、优化系统管理,对系统的自动识别、自动监测、态势描述、危险评估等功能进行处理。多传感器信息融合的技术能够将理论与实际结合在一起解决问题,并且可以从多方面体现多传感器信息融合的优越性,提高系统的应用能力,改变系统结构,扩展空间、解决信息处理速度的问题,提升系统的稳定性,降低获取信息的成本。
2 基于多传感器的信息融合技术的理论方法
2.1 模糊逻辑理论
模糊逻辑理论是不需要建立精确的数学模型,成本较低,比较方便计算,容易操作。但在获取和建立过程中,并不细致。模糊建模存在参数和结构不能按照系统的综合指标来设定。
2.2 Bayes 推理方法
Bayes推理方法应用较多,参数自适应和结构自适应方法。此种推理方法的数据要求必须是独立的,这样的要求对于系统构建存在困难,系统中存在一个增减规则,这种规则的存在必须重新计算概率,以保证系统的相关性与一致性。
2.3 Dempster-Shafer 推理
此种理论的优点在于能够很好处理不确定性的问题,对于条件概率密度可以后验。缺点是框架和证据独立性的问题辨识比较局限,并且存在高冲突证据组合的问题。
3 机器人导航定位研究
物流机器人在工作的过程中需要不断获取当前的工作状态与位置,使物流机器人能够实时躲避障碍物,从而顺利完成工作,达到目标。物流机器人在导航定位时采有两种方法,分别是相对定位和绝对定位,像GPS、信标等属于绝对定位,像深度相机、惯性导航、里程计则属于相对定位。相对定位的方法更适用于物流工作环境定位。本文主要针对多传感器信息融合情况下,对物流机器人的工作原理、定位方法、标定过程及导航算法进行分析和讨论。
3.1 BLE定位
蓝牙定位技术能够解决移动设备与固定设备之间通讯的问题,传统的蓝牙是指蓝牙3.0之前的蓝牙,BLE则是4.0规范下的蓝牙。BLE的通信设备分为两部分,一部分是中心设备,另一部分为外围设备,一般情况下,外围设备会利用中心设备的扫描,扫描通过外围设备广播的内容,在广播包中,包含了外围设备自身的识别标识,利用广播帧的内容,判断设备与中心设备的距离。每一个机器人都有独立的BLE的外围设备,这样能够保证中心设备发现机器人,数据包发送的时间设定为8-15ms之间,通过帧的有效负载来嵌入特定格式的数据包,完成信息传送。机器人定时定向对外部输送数据包,中心系统设备收到数据包,建立蓝牙模式,并将收到的数据包传送到云端服务器,云端服务器在进行统一的处理。通过蓝牙强度的显示,建立RSSI数据,通过RSSI训练样本的建立,分析物流机器人的位置与距离,对其进行下一步的指令。
物流机器人送货的目的地是分拣的每个区域,从许多货中挑选出每个机器人负责的货物类型,送到指定的区域,机器人的目的地是按照区域划分的,每一个区域中都安装了BLE的接收器,货物区域记作Aj,其中j是{1,2,3,……N},货物总部是B0,物流机器人记为Ci,其中i={1,2,3,4,5……N},在物流仓储环境下,遍布着WIFI信号以及每个区域的BLE无线信号,仓库内的环境,人员等因素都会干扰BLE的信号,会影响到定位的准确性,因此干扰信号的问题需要解决。可以将接收器安装在收货区域的上方,缩短感应距离,实现机器人能够点对点的定位,明确机器人向外部发送数据包的时间与速度。机器人向云端服务器发送数据包的主要内容包括,机器人的标识和RSSI数据值。云端服务器会根据收到的数据内容来判断机器人与收货、发货区域的距离,分析机器人哪个工位更适合工作。
3.2 移动定位技术系统分析
GPS应用在物流定位系统中,受到多重因素的影响,会影响信号的稳定性,还有丢失的可能。相比之下,BLE在物流机器人系统中的应用更可靠、更稳定。物流机器人主要选取的是轮式机器人,机器人移动的距离可以通过轮的转速与半径获得。在机器人的左右两边装有传感器,车轮在运行的过程中会通过传感器收集到数据,通过对收集数据的计算可以得出车轮的转速,然后将转速转到云端服务器。物流机器人系统的研发是基于STM32完成的,主要是将光电传感器与电子罗盘数据结合在一起,通过对移动距离与角度的计算,测算出机器人的坐标、距离、位置。另外,对RSSI数据的解析,建立BLE定位的分类模型,实时收集RSSI的数据,并对该数据进行分类输入,从而获取机器人的位置。在云端服务器中,将两种定位方法结合在一起,对环境传感器中的信息进行决策,进一步得到物流机器人的具体位置。
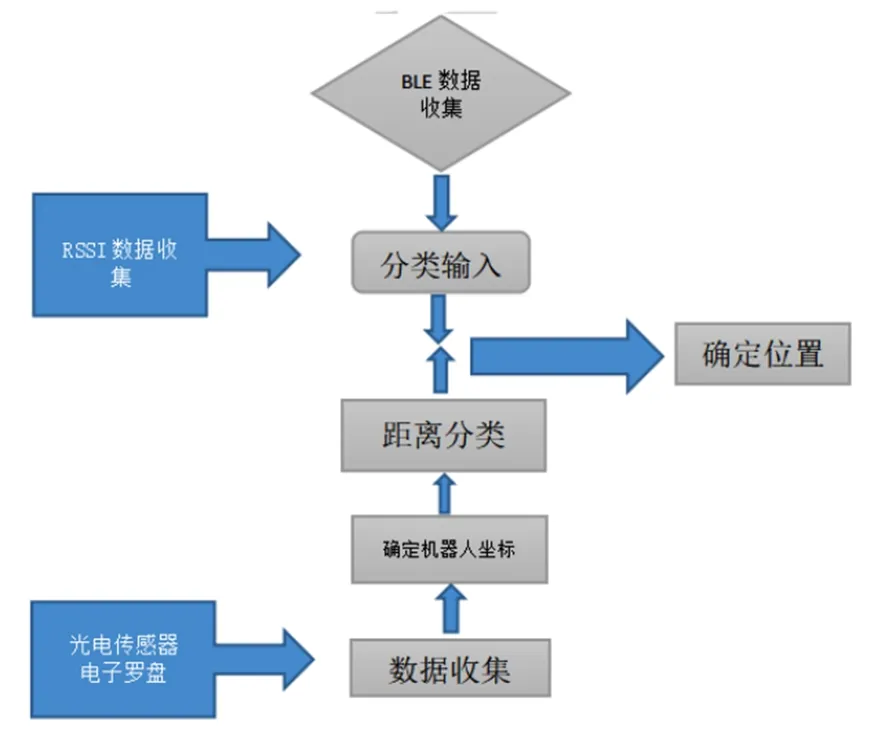
物流机器人的运动结构主要采用轮式运动,通过两个动力轮和一个支撑轮,动力轮的运动时通过电机驱动来完成,在电动机启动的过程中,传感器收集机器人左右轮子的转速和旋转角度,测量单位是0.1°,所以电子罗盘测量出的机器人角度区间是{0°-360°}。物流机器人系统的传感器包括光电传感器、灰度传感器、超声传感器,传感器主要的功能是确保机器人稳定运行,自主避障。一般机器人会分三个方向进行运动,直行、左转、右转,如图1所示。左、右光电传感器信号分别被标记为Fl、Fr,物流机器人的运动状态对于传感信号而言也是分为三种关系:Fl=Fr、Fl>Fr、Fl 图1 机器人的转向 基于BLE定位技术的算法与距离定位的算法,能够精准对机器人进行定位。假设时间为P、Q的时间间隔为Δt,物流机器人的移动距离为Cpq,X、Y相对位移增量为XΔt、YΔt,Q时刻的机器人与起点坐标的相对标记为XP、Yq,具体的计算方式如下,如公式(1)到公式(5): Cpq=2πR·Ps (1) XΔt=Cpq·cosθ (2) YΔt=Cpq·sinθ (3) Xp=XAj+XΔt(p-1)+XΔtp (4) Yq=YAj+……+YΔt(q-1)+YΔtq (5) 当物流机器人完成一次分拣、运输的任务时,就完成了一次位置的轮转,可定义为[仓库-道路-分拣区域],从物流仓库出发,将需要运送的货物送到指定的分拣区域,再回到仓库执行下一次任务。将B0设置为仓库,也就是机器人出发的起点,坐标设置为(XB0,YB0),XB0=0,YB0=0,将光电传感器与电子罗盘融合在一起,计算物流机器人在P时刻的坐标为Xp,Yp,然后将当前的坐标作为分类模型进行输入,应用近邻算法获取物流机器人当前所在的位置。 物流机器人定位算法主要包括两个部分,离线机器学习部分和在线测试部分。首先需要通过对机器人的设置与学习,建立整个系统的分类模式,分类模式需要融合BLE室内定位与距离定位两个模型。首先与BLE传感器、光电传感器、电子罗盘数据建立RSSI数据集,根据数据集来建立模型和算法,建立位置与数据库的映射关系,位置是由{B0-BN},有几个区域可以分为几类;对于位置坐标数据的采集,可以采用近邻算法,得到相对的坐标与位置,建立二者之间的映射关系。在线测试需要从两方面入手,一方面,收集BLE传输的蓝牙数据作为建模的数据输入,并且得出q时刻机器人具体的位置Wbq;另一方面,基于距离分类的模型和当前机器人相对的坐标为{Xq,Yq},得到物流机器人的位置为Wgq,最后将两个数据结果进行分类,并将q时刻的环境信息融合在一起,由综合控制单元进行决策分析,并输出服务器机器人在q时刻的位置,具体的流程可以按照图2来操作。 图2 数据收集流程 定位信息是物流机器人信息共享的一个参数,根据采集到的相关数据与参数对位置进行分析,也是对下一步工作部署、决策的重要依据。当物流机器人检测到自身要接近目的地时,可以对控制单元进行控制,对机器人进行语音操作与提示,提醒系统已完成分拣工作,送达任务,控制系统操作。另外当机器人完成工作回到仓库原点,系统会对上一次任务的环境和信息进行清除,进入等待下一次任务的状态。 对于单传感器来讲,加权平均法更适用,对于系统来讲,有较强的优越性,而Kalman、Unscented滤波能够解决图像融合的问题,模糊逻辑算法可以提高Kalman滤波的鲁棒性。对于提高融合精度可以使用小波变换,而解决Bayes的各种弊端可以使用Dempster- Shafer ,它能够改进Bayes存在一些问题,对其根本问题采用改进和延伸的方法。将各种方法解决在一起,能够很好地改善物流机器人系统的性能,解决存在的问题,促使物流机器人定位技术取得更好的效果。 多传感器信息融合技术是今后的发展方向之一,而并行体结构是传感器结构的发展方向,而并行计算能力也是计算机软硬件技术的合理体现。多传感器信息融合技术是一个平稳随机的过程,主要是线性结构分布,因此想要更快速的发展,需要提高系统性能,改进其算法,实现非平稳、非线性的信息融合算法。多传感器信息融合技术能够实现在室内环境中的定位与导航。关于传感器的布置,可以根据系统的需要来设立,根据系统的建立与管理来规划传感器的布置。 计算机发展速度非常快,传感器技术被应用到各个领域,人工智能理论也是飞速发展。传感器被应用到各个领域中,包括工业、农业、金融业、服务行业等多个领域。智能化机器人的应用能够提高工作效率,省时省力。机器人的开发与研究更加的深入,未来将会被商业化。物流机器人应用系统为传统物流仓储环节提供了便捷的工作流程,超高的工作效率。 本文对物流机器人导航定位系统的设计进行研究,将理论与实际结合在一起,对系统中核心的技术-定位导航进行研究。定位导航对于机器人来讲是关键性的问题,实现系统定位,精准定位,提高自身定位的准确性,输入可靠信号等,使机器人能够更高智能、更高效率的完成工作,提高物流机器人在特定模式下的稳定性与实用性,将是今后研究的重点。
4 物流机器人多信息融合的定位算法研究
5 传感器信息融合技术的发展趋势
5.1 传感器信息融合技术的研究结果
5.2 多传感器信息融合技术未来发展方向
6 结束语
