利用图像识别进行机械零件质量检测的方法研究
2019-11-13庞博
庞 博
(商丘职业技术学院,河南 商丘 476100)
随着计算机技术的不断发展,机器视觉在机械行业越来越广泛地被应用于产品识别、检测、装配等领域[1-2].应用于零件识别的机器视觉系统的核心是零件图像识别技术[3].当机械设备处于运行状态时,在各种不同的压力作用下,其内部的零部件的损坏往往会使机械设备产生故障.因此,为了避免可能造成的经济损失和事故,在机械设备运行过程中进行状态分析和故障诊断就显得尤为重要.
近年来,机器视觉在机械行业的零件识别、质量检测、参数测量等领域得到迅速发展[4].机械零件只是图像识别的一个对象,解决零件识别的核心是图像识别的理论与技术研究.虽然,国内外均对基于视觉的机械零件识别进行了研究,但是,大多数都还是基于特征的图像识别系统研究,其不同之处只是采用不同的识别特征.而本文研究的用于零件识别的机器视觉系统,其核心则是零件图像识别系统,这也是本文的研究目的.
1 图像预处理与边缘检测
图像识别技术使产品质量监控和故障诊断不再困难,图像识别的基本模式如图1所示. 其中,对收集的图像进行预处理是在进行图像识别之前的关键一步.可以将计算机的识别过程分为3阶段.第1阶段是将各零件的图像从背景图中分离出来,主要是图像分割或物体分离阶段.第2阶段是对物体进行度量,即特征抽取阶段.第3阶段是输出阶段,它是一种决策,即把每个物体确定为应归属的类别.
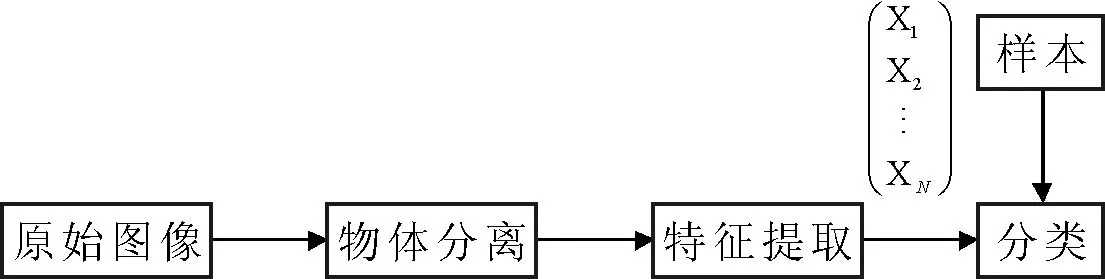
图1 计算机识别过程
在整个执行过程中,第1步要做的就是获取图像.然而,在图像的获取过程中,图像往往会产生噪声和畸变,无论是由于成像系统的限制,或者是外界环境的干扰,都会降低所采集到的图像的质量.图像中产生的这种噪声将加大图像分析的难度,这就需要利用图像滤波来有效地改善图像质量.
1.1 图像获取与平滑处理
采用均值滤波对零件图像进行平滑处理,即将图像中的每一个像素的灰度值用这一像素及其周围一定范围邻域内所有像素的平均值来代替[5-6].假设图像中位置为[i,j]的像素,它的灰度值为f[i,j],则经过均值滤波后的输出值h[i,j],则可以表示为以下形式:
(1)
上式中,M表示邻域N内的像素总数,而N表示以[i,j]为中心的邻域的集合.在进行数字图像处理的过程中,均值滤波用一个模板与原图像进行卷积计算得到平滑后的图像.
模板的大小通常为3×3、5×5、7×7模板分别为:
作为一种线性滤波器,均值滤波在去除噪声的同时会使边界信息减弱[7],使图像变得模糊.这是由于它是以图像模糊为代价来换取噪声的减小,且面积(即模板大小)越大,噪声减少越显著,同时图像模糊程度也越大.图2为飞轮原图像与平滑后图像的对比结果.
1.2 图像二值化处理
二值图像指的是只有黑白两色的图像.二值化图像处理技术应用已十分广泛,并且其在处理黑白两色图像时占有十分重要的地位.数学形态学处理的对象主要是二值图像,可根据下式的阈值处理来进行图像的二值化处理.
(2)
一般情况下,值为0和1的部分,分别表示背景和对象图形.
1.3 图像分割
(3)
图像总的灰度均值为:
(4)
由此,得到A、B两区域的类间方差为:
σ2=pA(ωA-ω0)2+pB(ωB-ω0)2
(5)
(5)式中,pA、pb、ωA、ωB、ω0、σ2均是关于灰度级的函数.判别准则通常是两类的类间方差,最佳阈值即使得σ2值最大为t*:
(6)
通过这种方法得到最优分割阈值.类间方差最大,表示错误分割的概率最小,即方差是灰度分布均匀性的一种度量.
1.4 基于梯度的边缘检测
边缘检测是图像预处理的一个必要过程.由于图像的边缘具有勾画区域形状、能被局部定义及传递大部分图像信息等诸多优点.因此,边缘检测效果是解决问题的关键.边缘检测作为一种应用广泛的技术手段,在处理数字图像时,常以一阶差分替代一阶微分[8]:
(7)
根据定义,可以将梯度的幅度表示为以下形式:
G[f(x,y)]={[Δxf(x,y)]2+[Δyf(x,y)]2}1/2
(8)
Sobel边缘检测算子的计算范围有两个步骤:第1步是进行加权平均;第2步是微分运算.其算子的形式可以表示为:
(9)
在检测边缘时,Sobel边缘检测算子可以得到至少两个像素的边缘宽度,具有一定的噪声抑制能力.Sobel算子水平方向的模板对水平边缘响应最大,而其垂直方向模板对垂直边缘响应最大(垂直方向和水平方向的模板见图3).该像素点的输出值为两个卷积的最大值.图像中的每个像素均用这两个模板进行卷积.

图3 Sobel算子模板
2 特征提取与识别
图像的特征是指图像显著的基本特征或特性.要选取图像的特征参数,需要采用特定的预处理方法以得到图像形状特征,即根据图像的不同情况以及零件的图像特征制定不同方案.文中选取伸长度(E)这一参数作为模式样本的特征:
(10)
上式中,当E=1时,图形区域就成了圆形;E越小,伸长度图形区域越呈细长形.设方向码ai在以x0,y0为起始坐标的x轴,y轴上的分量分别是aix,aiy,则有:

(11)

(12)
(13)

数学形态学常用它来处理与形状和结构有关的问题,这是一种应用于图像处理和模式识别领域的新方法. 数学形态学获取图像形状信息的3种方法分别是链码法标记图像、标号法标记图像、轮廓跟踪法标记图像,这3种方法是在对图像的形态特征参数进行提取时经常采用的方法.
轮廓跟踪的计算有两个步骤:第一是对图像点进行检测运算;第二是对图像点作跟踪运算,这是一种基于点相关的图像分割法.因此,只需要对某些点重复简单的检测运算即可,而不用再对每个点进行相同的、复杂的检测运算.如果图像是二值图像,就需要找出对象的边缘轮廓.可以按照以下规律进行跟踪:
A:每次只前进一步,步距为一个像素;
B: 由黑区进入白区时,之后每一步向右转,至穿出白区停下;
C:由白区进入黑区时,之后每一步向左转,至穿出黑区停止.
由于无需对每一像素进行处理,这种方法相对于区域生长法和图像细化法,更为实用.如此循环一周后,所经过的轨迹便是对象的轮廓.但在要求实时处理的情况下,这种方法仍需要进一步完善.
3 识别实验
为了验证本文方法对各种缺陷类型零件检测的有效性,选取了大、小两种尺寸的齿轮进行试验.每种缺陷类型的数目都为48个,每个零件只有一种缺陷,实验结果如表1所示.总体而言,在气孔、划痕、破损、砂眼和裂纹几种不同类型的缺陷之中,本文方法的识别率还是相当高的.其中,对裂纹的识别准确性最高,达到了100%.而气孔和砂眼这两类缺陷由于易混淆,识别性能略低.

表1 本文方法识别结果
4 结语
机械零件质量检测图像识别技术,是指通过采集机械零件缺陷部位的数字成像进行识别.对零件图像识别系统来说,其中的关键技术是对零件图像进行边缘检测、特征提取.本文提出了一种利用图像识别的机械零件质量检测方法,即运用计算机识别技术对图像进行预处理,分析图像特征并加以提取,从而判断机械零件是否存在质量缺陷的一种技术方法.本文选取了大、小两种尺寸的齿轮进行实验,结果显示,提出的方法在识别上具有较高的准确率,验证了提出方法的有效性.