基于球面拟合法评定三维激光扫描点云测量精度
2019-11-13张大富赵雪莹刘科利
张大富,赵雪莹,刘科利,王 建
(山东理工大学 建筑工程学院, 山东 淄博 255049)
三维激光扫描技术是一种先进的全自动、高精度、立体扫描技术,其优点是快捷、方便、准确、动态、实时、全数字化,具有高精度、测量方式灵活、不接触等特点。利用三维激光扫描技术可以快速、高效、连续地获取海量点云数据,进而快速得到被测物体三维模型[1],以便对其模型进行数据处理与分析,或者为相应的数字化产品提供基础数据源[2]。三维激光扫描技术越来越被人们所接受,特别是随着电子读盘、强制对中、GPS定位等配置的出现,对激光扫描技术的应用研究越来越多。但对用户来讲,如何针对具体工作,根据地面激光扫描系统的精度来选择合适的扫描仪器,还是有一定的困难,因为对各种激光扫描仪精度的评述,仅限于厂家的标定[3],或者是特定场地、环境下的针对特定仪器的测定,而且目前地面激光扫描仪还没有统一的检核规范[4-5]。球形标靶用于扫描的标准控制点,标靶球心之间的距离用于点云精度的检测[6],也可用标靶球心坐标转换后的坐标与全站仪/GPS坐标比较计算三项误差,从而对点云坐标转换后的精度进行评定[7-9]。可见球形标靶在点云精度评定中有重要作用。
三维激光扫描点位是众多点拟合求的点[10],与全站仪直接测量点位(单点测量)不同,其误差影响因素除了仪器本身误差、观测误差、测量误差外,还与观测目标的几何形状、反射表面的物质、分辨率、及点云的拼接误差有关系[11]。对于三维激光扫描仪扫描数据精度的评定方法,有许多的实验方法和讨论。一种常见方式是建立复杂的实验场地,通过对距离、角度、环境与反射面各个影响要素的变化,对固定目标进行多次扫描,计算点位中误差等统计量,比较标准平面和球面靶标的距离扫描差值(全站仪测定之为真值),分析各个因素对点位精度的影响[12]。另一种常见方式是建立简单扫描实验场地,采用扫尾激光扫描仪和其他测量仪器(如全站仪)对同一目标点通过变化离扫描点的距离进行测量,数据分析比较,此为单点定位外部精度符合评价方案,得出扫描仪同其他高精度仪器之间的精度关系[12-14]。两种方法对某种扫描仪在特定条件下的精度评价都是有益的,可以为三维激光扫描仪的进一步应用提供经验和借鉴,其实验过程,需要设计特定场地,设定全站仪测量值做为真值来对扫描数据进行误差计算,没有考虑扫描目标点的设置与全站仪测定目标的安置差异和球面标靶的中心点位拟合的过程误差,并且只是针对平面精度进行分析,对于纵向测量误差没有讨论。
本文提出一种球面拟合法,对三维激光扫描点定位精度进行评定。该方法通过扫描不同距离的球面,根据其上扫描点的分布,利用拟合曲面的拟合误差,评定扫描数据的精度。此方法不需要专门场地,在实际激光扫描工作中可一并进行,直接反映了实际扫描精度。同时,此方法的评定过程,包含了环境、测量、仪器本身的误差,也包含了拟合过程中的纵向误差,是一种平面和高程测量的综合误差的实际评定,对激光三维扫描仪在工程实际应用中精度的评定、分析具有重要实践意义。
1 球面拟合精度评定模型的建立
在实际扫描作业中,对作为定向标靶的球体进行球面扫描,理论上扫描点云必然分布在球体表面。
设Pi(x,y,z)为球面Rd空间点云SC的一个点,表达为SC={pi}⊂Rd,d表示空间点的维数。如当d=3时,点云SC属三维空间,表达为SC={Pi}⊂R3,用于表达在几何空间上的点云操作原子。在三维激光扫描中,维数d=7,Pi(xi,yi,zi,ri,gi,bi,ρi)∈R7,其中,(xi,yi,zi)表示Pi的三维点坐标,(ri,gi,bi,ρi)表示Pi色彩的红绿蓝三原色和反射率。SC由特征参数X=[u,v,w,r]T确定,(u,v,w,r)为球心坐标和球半径,如图1所示。
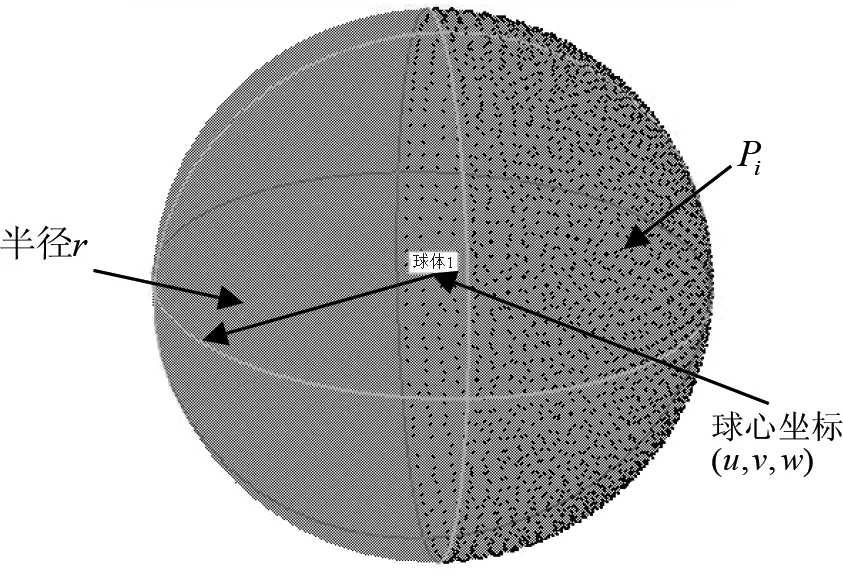
图1 球体扫描点云示意图Fig.1 Schematic diagram of sphere scanning point clouds
球面点云坐标满足球体公式
(x-u)2+(y-v)2+(z-w)2=r2
(1)
式中:(x,y,z)为球面点坐标;(u,v,w)为球心坐标;r为球半径。将式(1)变换形式推导可得
2xu+2yv+2zw-(u2+v2+w2-r2)=
x2+y2+z2
(2)
令d=u2+v2+w2-r2,可得
2xu+2yv+2zw-d=x2+y2+z2
(3)
将所有球面点坐标代入式(3),可得矩阵方程,计算球心坐标(u,v,w)
X=(BTB)-1Bl
(4)
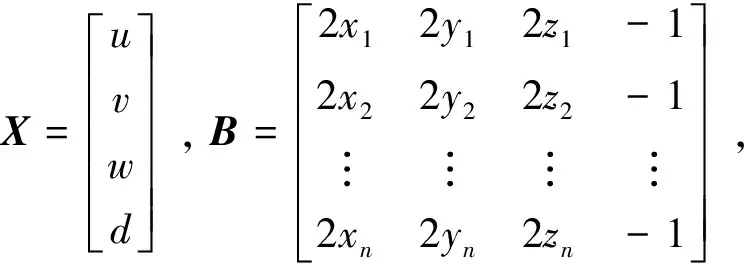
因此,可计算得球半径r为
(5)
(6)

(7)
2 实验与数据分析
2.1 三维激光扫描仪
本实验是某石材矿山三维模型建立的数据采集,使用的激光扫描仪型号为LMS-Z620,是Riegl公司在2008年推出的超长测距、高精度的三维激光扫描成像仪,采用对人眼和动物眼安全的一级激光器,可以用于电力、铁路、公路工程,矿山开发、滑坡监测等。扫描仪的基本性能参数见表1。
表1 LMS-Z620基本性能参数
Tab.1 The basic parameters of LMS-Z620
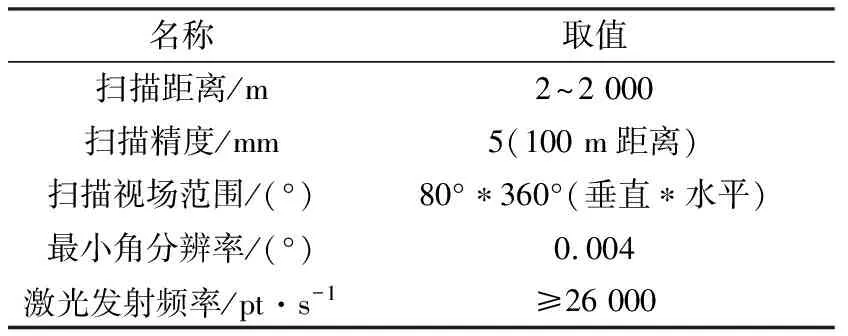
名称取值扫描距离/m2~2 000扫描精度/mm5(100 m距离)扫描视场范围/(°)80°∗360°(垂直∗水平)最小角分辨率/(°)0.004激光发射频率/pt·s-1≥26 000
2.2 数据获取过程
在实际数据处理过程中进行点云数据三维坐标的转换和点云拼接,在设站扫描过程中需要进行定向,每个扫描站需要在3个以上具有工程坐标的已知点上安置球形标靶进行定向,通过扫描获取球形标靶的扫描点云数据。
根据标靶距离基准站的不同,选取4组球形标靶点云数据,其视图如图2所示。
2.3 精度分析
统计上述4个标靶球面的拟合数据,各标靶球上的部分球面点坐标(x,y,z)、球面点拟合误差ΔX、ΔY、ΔZ、ΔP及标靶球拟合精度见表2—表5。
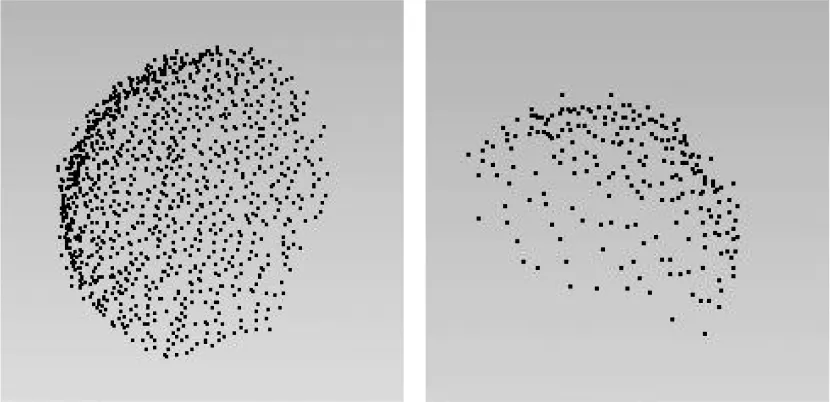
(a) 11 m (b) 23 m
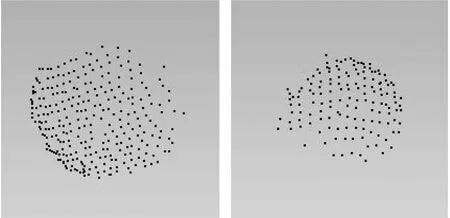
(c)50 m (d) 71 m图2 与基准站不同距离的球面点云视图Fig.2 Spherical point clouds view of different distance from the reference station
表2 距离为11 m的球面拟合数据
Tab.2 Spherical fitting data of 11m from the reference station
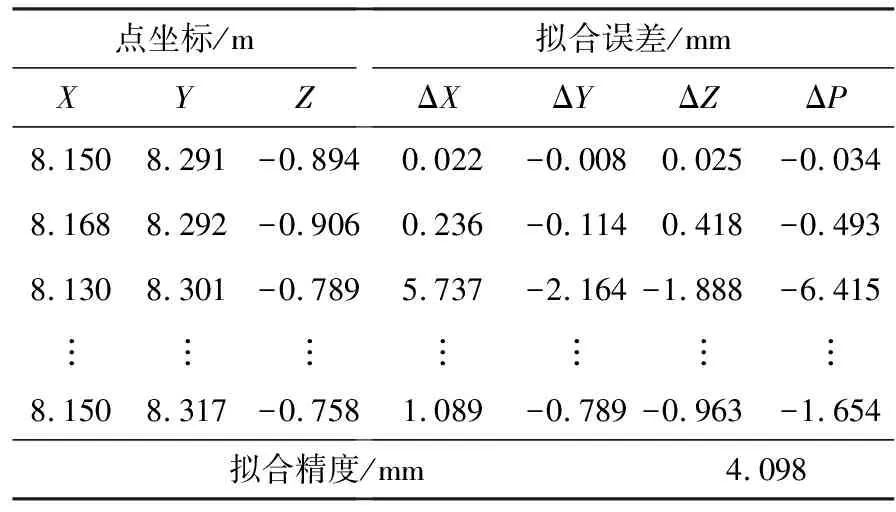
点坐标/m拟合误差/mmXYZΔXΔYΔZΔP8.1508.291-0.8940.022-0.0080.025-0.0348.1688.292-0.9060.236-0.1140.418-0.4938.1308.301-0.7895.737-2.164-1.888-6.415︙︙︙︙︙︙︙8.1508.317-0.7581.089-0.789-0.963-1.654拟合精度/mm4.098
表3 距离为23 m的球面拟合数据
Tab.3 Spherical fitting data of 23m from the reference station
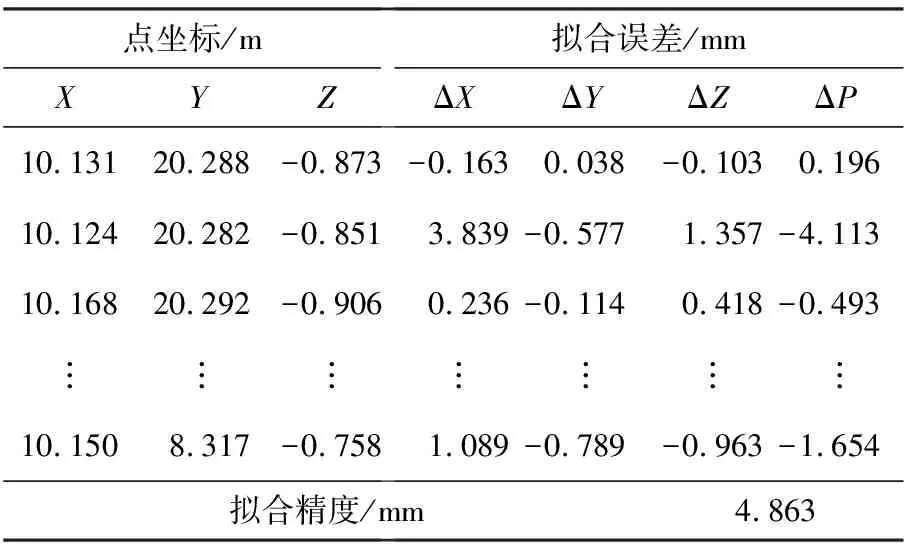
点坐标/m拟合误差/mmXYZΔXΔYΔZΔP10.13120.288-0.873-0.1630.038-0.1030.19610.12420.282-0.8513.839-0.5771.357-4.11310.16820.292-0.9060.236-0.1140.418-0.493︙︙︙︙︙︙︙10.1508.317-0.7581.089-0.789-0.963-1.654拟合精度/mm4.863
表4 距离为50 m的球面拟合数据
Tab.4 Spherical fitting data of 50m from the reference station
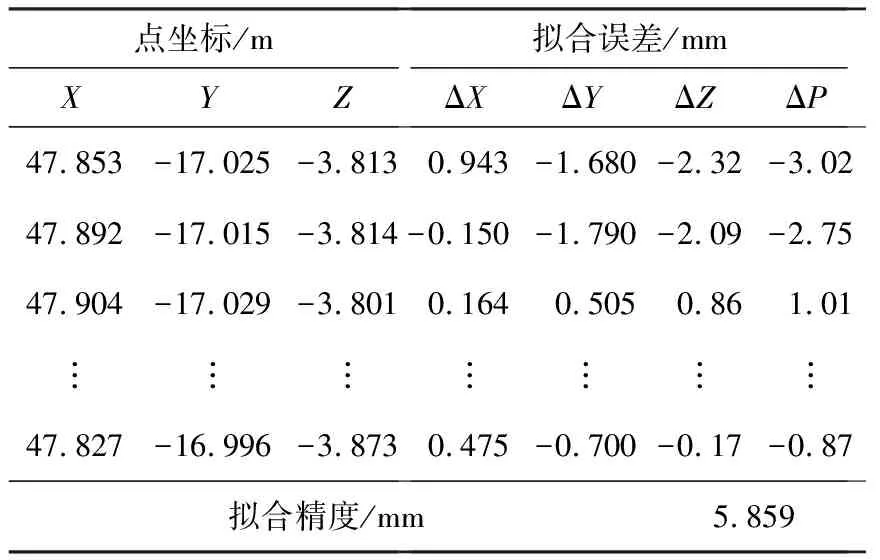
点坐标/m拟合误差/mmXYZΔXΔYΔZΔP47.853-17.025-3.8130.943-1.680-2.32-3.0247.892-17.015-3.814-0.150-1.790-2.09-2.7547.904-17.029-3.8010.1640.5050.861.01︙︙︙︙︙︙︙47.827-16.996-3.8730.475-0.700-0.17-0.87拟合精度/mm5.859
表5 距离为71 m的球面拟合数据
Tab.5 Spherical fitting data of 71m from the reference station
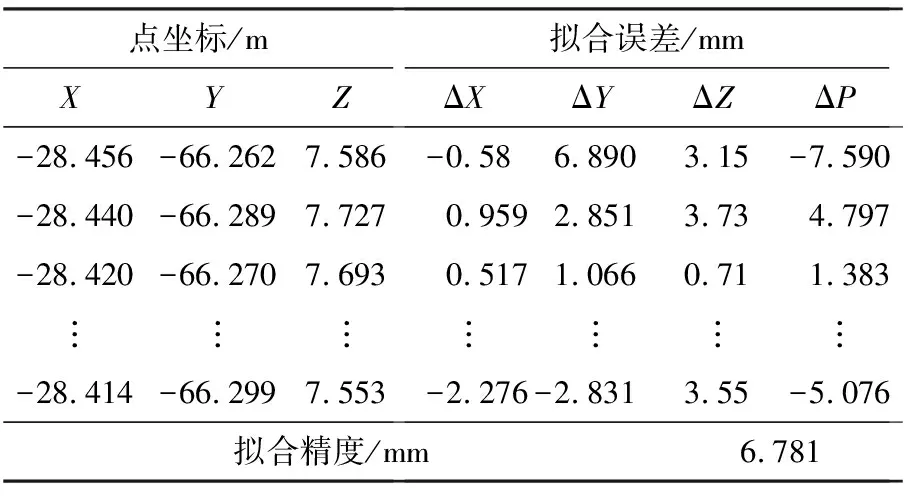
点坐标/m拟合误差/mmXYZΔXΔYΔZΔP-28.456-66.2627.586-0.586.8903.15-7.590-28.440-66.2897.7270.9592.8513.734.797-28.420-66.2707.6930.5171.0660.711.383︙︙︙︙︙︙︙-28.414-66.2997.553-2.276-2.8313.55-5.076拟合精度/mm6.781
绘制拟合精度与扫描距离关系曲线图,如图3所示。
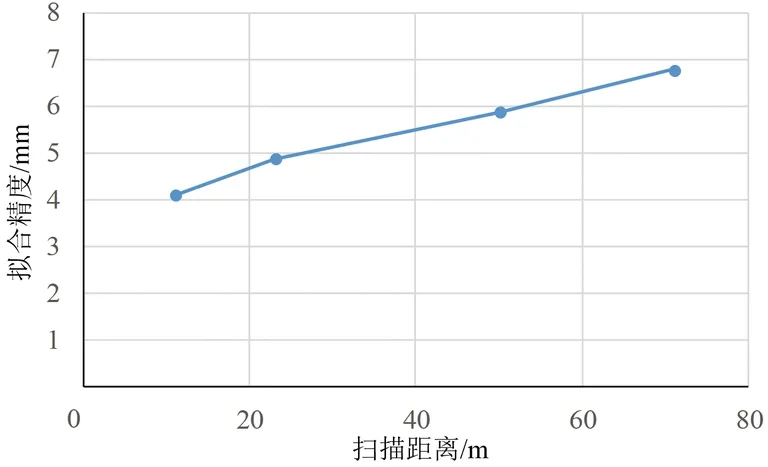
图3 拟合精度与扫描距离关系曲线Fig.3 Curve of relationship between fitting accuracy and scanning distance
通过对各个标靶球面拟合数据的分析可以得到:(1)三维激光扫描仪球面拟合精度与标靶距离基本符合一元一次线性函数关系; (2)当扫描距离超过一定数值(50 m)后,实测精度明显低于仪器标称精度。因此选择扫描仪测量时可根据本方法进行精度检验,确定仪器实际测量精度。
3 结束语
三维激光扫描仪的工作精度受多方面因素的影响,仪器精度的检验还没有一个固定的标准,本文提出了对三维激光扫描实际工作测量精度的检验方法,该方法在实际工作中不需要单独建立实验场地和采集数据,直接依据工作过程中球形标靶扫描点云数据,实时评定其测量精度。对获取扫描仪工作时的测量精度,探索和制定扫描仪在实践应用中的使用标准提供依据。
在利用球面拟合评定精度的过程中,注意球面数据的获取过程要进行去噪处理,在巨大点云数据中准确识别出球形标靶点云数据,以保证拟合精度的准确性。
