支持动态编辑的交通路网语义建模方法
2019-11-13何晓宇
王 华,何晓宇
支持动态编辑的交通路网语义建模方法
王 华,何晓宇
(郑州轻工业大学计算机与通信工程学院,河南 郑州 450000)
针对现有交通路网语义建模方法不支持新增道路、道路加宽/变窄、潮汐车道设置、道路连通性设置等路网交通属性动态编辑修改的问题,提出了一种支持动态编辑的交通路网语义建模方法。通过分析路网内正常路段和交叉路口之间的耦合关系,给出了由传统Lane、路口Lane,Link,Connection,Intersection以及Road等组成的具有层次耦合关系的路网语义数据。只需输入道路中轴线数据,上述语义数据即可全部自动生成。路网交通属性动态编辑修改后,只需对相应路段和相连路口语义进行解耦重新计算即可完成路网语义数据的动态更新。实验结果表明,只需要输入道路中轴线矢量数据和道路宽度数据,该方法即可准确、高效地完成交通路网语义建模,并且支持路网交通属性的动态编辑且可以实现交通相位的自动生成。
交通仿真;路网语义建模;动态编辑;层次语义结构
自1908年汽车被大规模生产以来,与之相伴的交通拥堵问题开始在世界范围内不断凸显。许多城市通过道路扩建、设置潮汐车道、开放封闭小区等措施来缓解交通压力。然而,盲目采取措施,非但不能从根本上解决交通问题,反而可能加剧拥堵,并且对环境造成不可挽回的破坏。
构建支持动态编辑的交通路网语义模型,基于该路网模型进行交通模拟和推演,可以在直观展示模拟过程的同时,动态编辑路网交通属性(新增道路、道路加宽/变窄、潮汐车道设置、道路连通性设置等),并对编辑后的交通进行仿真推演,从而有效指导交通设计和规划,具有重要的现实意义。
目前已有许多学者致力于路网语义建模方面的研究。根据用途不同,可将路网语义模型分为2类:①用于场景建模的路网模型[1-4],致力于场景的构建,不关注路网内各种拓扑关系的组织和生成,通常无法直接应用于交通仿真;②用于车辆运动仿真的交通路网模型[5-8],根据粗粒度的路网数据生成细粒度的车道数据,然后进一步生成车道之间的拓扑关系数据。然而,已有用于交通仿真的路网模型存在如下问题:
(1) 路口数据需要作为输入数据输入。
(2) 构建的路网语义模型不支持新增道路、道路加宽/变窄、潮汐车道设置、道路连通性设置等路网属性的动态编辑和修改。
针对上述问题,本文提出了一种支持动态编辑的路网语义建模方法。方法采用Lane表示路网内车辆的运行轨迹,采用Link,Connection,Intersection,Road等刻画路网内的拓扑连接关系和邻接关系。方法需要的输入数据来自开源地图数据平台OpenStreetMap中的道路中轴线数据和道路宽度数据。基于上述数据,本文方法可以自动生成Lane,Link,Connection,Intersection,以及Road等路网语义数据,并可以自动生成路口交通相位信息。将本文方法用于多个实际区域内路网数据的自动生成,结果表明,其可自动准确地生成可该区域内交通路网语义数据,并支持动态编辑和修改。
1 相关工作
现有的路网模型根据用途不同分为场景路网模型和交通路网模型。
从场景建模的目标出发,PARISH和MÜLLER[9]提出了采用L-system分形算法生成道路网络的模型,其思想为采用两次分形算法分别生成路网和建筑。后来许多学者在该思路上提出了改进的或新的道路网络模型[10-12],例如,CHEN等[13]提出了一种允许用户编辑的路网自动生成模型;SUN等[14]提出了基于模板的路网数据生成模型;TAAL和BIDARRA[2]提出的一种基于规则推理的道路信号标识生成模型;SILVA[3]提出了一种基于语法规则和程序化内容的城市路网生成方法;TENG和BIDARRA[4]提出了一种基于快拼接的路网自动生成模型。上述路网建模主要用于构建虚拟场景。模型主要关注线路的矢量数据信息,可以方便地实现对路网形状的编辑(如CityEngine软件),但无法提供车辆运动模拟中需要的拓扑数据信息,如线路与线路之间的连接、邻接、冲突关系等,拓扑信息的构建和编辑需要额外建模。
针对车辆运动仿真技术的需求,目前已有许多交通路网模型用来实现车辆运动模拟和路径导航。现有的交通仿真软件[15-17]大都采用Node,Link,Segment和Lane来描述交通仿真路网语义。此类模型主要从路网的拓扑数据关系着手定义路网语义结构。WILKIE等[5]提出了车道线矢量数据的弧线表示方法,实现了将粗糙、低细节GIS路网数据转化为高细节交通路网数据。MAO等[6]提出了采用压缩点列表示车道线的方法,不仅保持了路网的细节,还提高了车辆运动模拟过程中获取车辆位置信息的效率。王华等[8]提出了一种针对车辆群组动画仿真的分层路网语义模型,线路冲突关系可以自动生成,大大减少了数据输入量。在上述模型中,车道与车道之间具有紧耦合关系,改变少数几条车道方向就需要重新计算路网内所有车道之间的拓扑关系,繁琐且计算量庞大。并且,路口数据需要作为输入数据,且很难从现有GIS地图数据中直接得到,通常需要定制获得。
本文针对已有模型存在的缺陷,以开源地图数据平台OpenStreetMap中的道路中轴线和道路宽度数据为输入,构建语义模型,自动生成交通仿真所需要的车辆运动轨迹数据和路网之间的拓扑关系数据。
2 交通路网语义建模
一般意义上的路网指的是纵横交错的道路,而道路是由车道组成的。要想最大程度满足交通仿真的需求,路网内车道之间的表示和组织方式至关重要[8]。
从交通仿真的角度而言:一方面,路网内车道本质上给出了车辆的可运动轨迹;另一方面,实际路网内的车道是由道路中轴线向内外法线方向延拓得到的。如果简单的将道路中轴线延拓,在交叉路口处延拓得到的车道线显然无法准确刻画车辆在该处的运动轨迹(边车道通常是右转而非直行,最内侧车道通常是左转而非直行等)。因此,上述路口处车辆的运行轨迹通常不能直接得到。
基于此,本文给出了一种广义的车道——Lane。Lane用来描述车辆沿线路的运动轨迹,不仅包括实际意义上的车道(非路口处的车道),还包括交叉路口处额外添加用来描述可行驶方向的轨迹曲线。本文将上述2类Lane分别命名为传统Lane和路口Lane。在Lane之上构建Link,Connection,Intersection以及Road等具有耦合关系的层次结构(图1)来描述车道之间的连接、邻接等拓扑关系。

图1 路网层次语义结构
传统Lane描述非交叉路口处车辆的运行轨迹,由非路口处的道路中轴线向内外法线方向延拓得到的,不仅包含自身的矢量数据信息,还包含一些简单的拓扑数据信息,如左右邻居关系、前后连接关系等。
一条非路口处的道路中轴线向单侧延拓,得到的所有传统Lane的集合,构成一个Link。Link中任意2个Lane之间具有直接或间接的邻居关系。两者具有间接的邻居关系指的是一方通过查找邻居的邻居,并持续进行下去,一定能够查找到对方。
路口Lane表示路网内交叉路口处车辆的运动轨迹。任意一条路口Lane需满足如下条件:
(1) 以终结于当前路口的传统Lane的终点为起点,并在该点处与该传统Lane相切;
(2) 以起始于当前路口的传统Lane的起点为终点,并在该点处与该传统Lane相切;
(3) 路口Lane曲线上各点处二阶光滑;
(4) 同一路口内任意一个传统Lane终点与另外一个传统Lane起点之间,最多只能生成一条路口Lane;
(5) 同一路口内同一Link流出的车流在路口三维空间区域内禁止再次交叉(图2);
(6) 任意2条走向相同的路口Lane,除起终点外曲线内部无交叉。走向相同指的是2个路口Lane在起点处以及终点处的切向量都大致相等。

图2 同一Link流出车流在路口内交叉示意图
以上是对路口Lane的矢量数据信息的约束。此外,路口Lane还包含一些拓扑关系信息(前后连接关系)等。
Intersection描述路网内的交叉路口,包含该交叉路口处生成的所有路口Lane,以及与该路口Lane相连接的传统Lane和交叉路口Intersection的关系。
本文采用符号网络的思想定义传统Lane和Intersection的关系。传统Lane和Intersection的关系用“+”和“–”表示,分别表示积极关系和消极关系。积极的关系指该传统Lane的终点为Intersection中某一路口Lane的起点;消极关系指该传统Lane的起点为Intersection中某一路口Lane的终点(图3)。
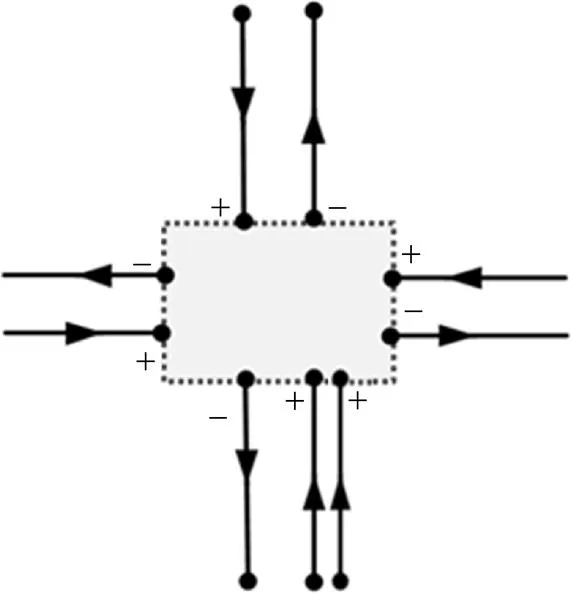
图3 Intersection和传统Lane关系示意图
Connector给出了哪些Link之间相连接。一个Connector定义了如下一组关系:
Connector={< Link1, Link2>, Link2连接于Link1}其中,Link1和Link2为2个独立的Link。Link2连接于Link1指的是,若Link1中存在1条Lane的后继Lane与Link2中1条Lane的前继Lane为同一Lane,并且该Lane为路口Lane,则称Link1连接于Link2。
Road用来描述直观意义上的路,是Link和Intersection的集合,集合大小由每个Link的名称决定。
3 交通路网语义数据生成
本文路网语义模型数据的输入是道路中轴线数据以及双向路段宽度信息(用来获得当前路段的车道数目,不提供则默认生成双向双车道)。接下来给出如何基于上述输入数据生成本文路网语义数据。
3.1 传统Lane及Link的生成
传统Lane的数据包含有矢量数据和拓扑数据。本文分别给出矢量数据的生成方式及拓扑数据中左右邻居关系数据的生成方式。
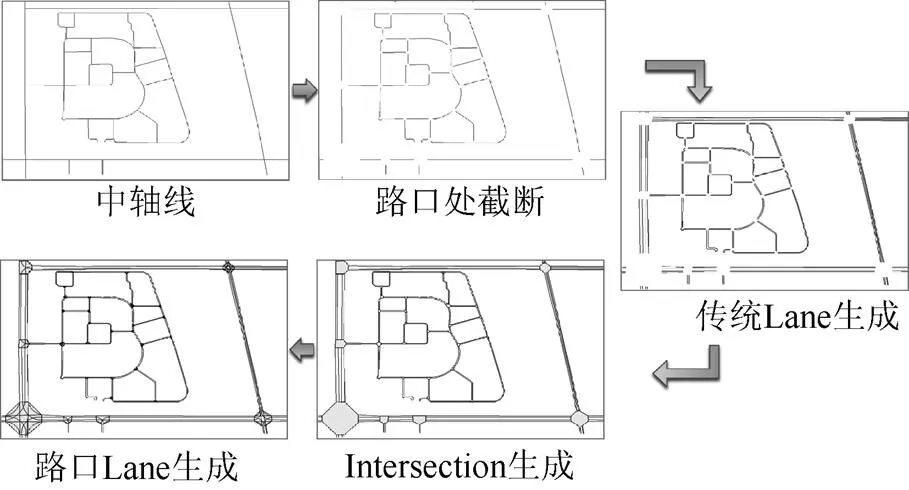
(1) 传统Lane矢量数据。除路口外正常路段车道中轴线的矢量数据。本文的输入数据是道路中轴线数据,道路中轴线通常不区分正常路段和路口。
为了将路口信息过滤掉,仅获得传统Lane,本文首先以空间相交道路中轴线的交点为中心,以为半径,对相交道路中轴线进行截断,同时生成相应Intersection。为

执行上述截断操作后,保留不相交道路中轴线,舍弃相交部分道路中轴线。并将不相交中轴线ID聚合生成一个Intersection,以方便接下来计算Intersection和传统Lane的关系。
采用文献[9]方法,基于上述打断的道路中轴线向两侧延拓生成该道路中轴线两侧的传统Lane矢量数据。
(2) 传统Lane邻居关系数据。道路中轴线向单侧延拓时,相邻2次延拓生成的2个传统Lane互为左右邻居,且矢量方向一致。延拓步长由车道宽度决定,若当前车道轴线中无车道宽度信息,默认为3.8 m。单侧延拓生成的传统Lane个数由路段宽度决定。
Link:单条道路中轴线向单侧延拓生成的所有传统Lane的集合组成1个Link,1条道路中轴线可以生成2个Link。
3.2 Intersection及路口Lane的生成
Intersection包含与其相交传统Lane的关系以及路口Lane。
获得Intersection与其相交传统Lane的关系,首先需要计算与当前Intersection相交的传统Lane集合。遍历第3.1节得到的Intersection中所有道路中轴线,基于上述道路中轴线延拓得到的传统Lane均与当前Intersection相交。然后根据传统Lane矢量数据信息获得与Intersection的关系:记当前Intersection生成时的截断道路中轴线前交点为,若当前传统Lane终点与的距离小于其终点与的距离,则该传统Lane与当前Intersection的关系为“+”,否则关系为“–”。
路口Lane矢量数据根据当前Intersection与传统Lane的关系自动生成。
根据路口Lane的定义并结合实际不难发现如下规律:
(1) 路口Lane总是以和Intersection关系为“+”的传统Lane的终点为起点,以和Intersection关系为“–”的传统Lane的起点为终点;
(2) 令与当前Intersection相交传统Lane分别属于个Link,则为偶数,并且任1个Link内的传统Lane和Intersection关系要么全为“+”,要么全为“–”;
(3) 上述个Link中,有/2个Link内的传统Lane和Intersection关系为“+”,/2个Link内的传统Lane和Intersection关系为“–”;
(4) 相邻2个Link内的传统Lane与当前Intersection关系相反;
(5) 和Intersection关系为“+”的传统Lane与其沿顺时针方向的下1个关系为“–”的传统Lane为同一道路中轴线延拓生成的2条Lane,也即2条传统Lane为同1条道路上相反方向的2条车道;
(6) 若1个Link内的传统Lane与当前Intersection关系为“+”,则以该Link内传统Lane为起点的生成的路口Lane满足:①Link内传统Lane以逆时针为顺序,第1个传统Lane与其顺时针方向的下1个传统Lane可以生成路口Lane,对应实际中的车辆掉头轨迹。②Link内传统Lane以逆时针为顺序,与其他与Intersection关系为“–”的M/2个Link内的传统Lane以顺时针为顺序,依次连接生成路口Lane,对应实际中的车辆通过路口轨迹(图4)。

图4 Link内传统Lane为起点生成路口Lane示意图
根据上述规律,为了生成合理的路口Lane,本文首先将当前Intersection相交传统Lane所属Link按照顺时针进行排序(图5)。同一Link内的传统Lane逆时针进行排序。
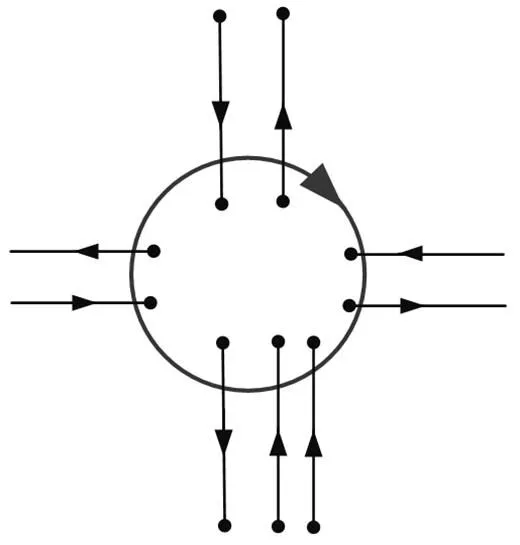
图5 Intersection相交传统Lane顺时针排序示意图
基于上述排序后的Link,采用Bézier曲线拟合生成当前Intersection内的所有路口Lane。其伪代码如下:
int fromN;// 关系为“+”Lane在其Link内的位置
int toN;// 关系为“–”Lane在其Link内的位置
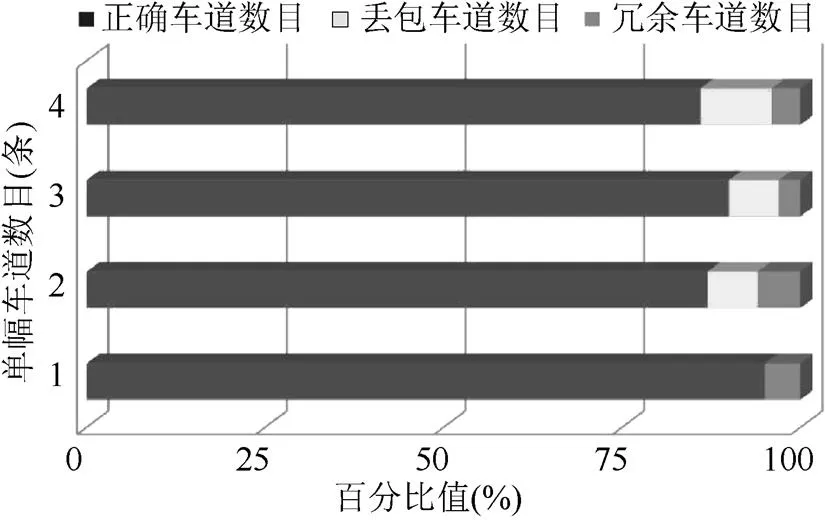
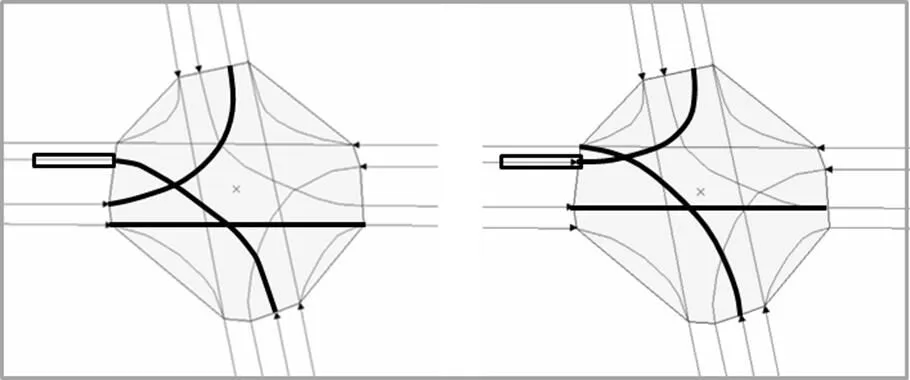
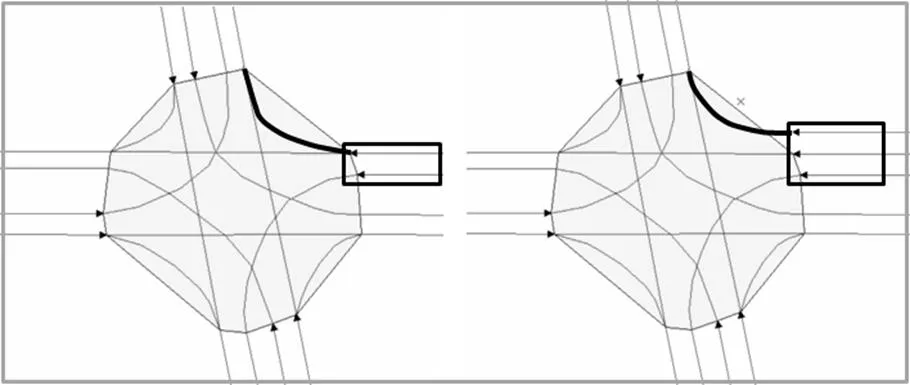
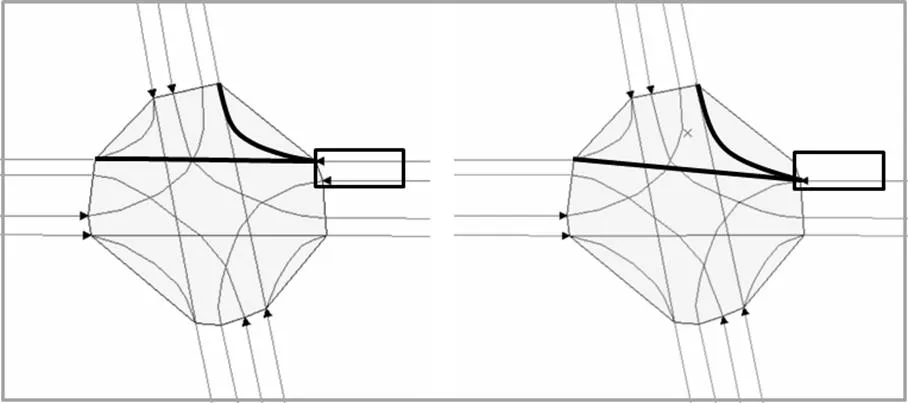
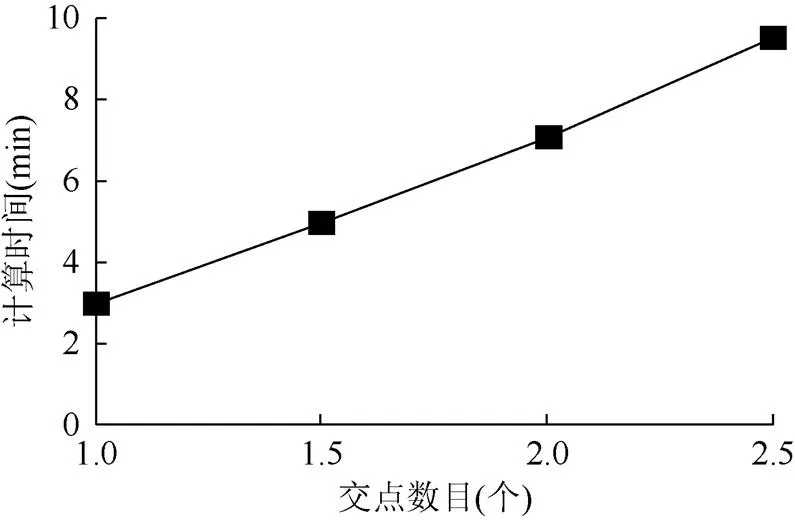
for (i=1; i k=i+1; num=1; while(num<=M/2) if(k>M) k=k–M; fromN=num; ToN=num; if(fromN>其Link内Lane总数目N1) fromN=N1; if(ToN>其Link内Lane总数目N2) ToN=N2; 一条路口Lane ß Bezier (第i个Link内第fromN个传统Lane终点坐标及切向量,第k个Link内第ToN个传统Lane起坐标及切向量); if(k!=i+1) num++; k++; end while end for Connector表示Link与Link之间的连接关系。本文Link与Link之间通过路口Lane相连接。由3.2节知,与同一Intersection相交的传统Lane所属Link之间都具有连接关系。因此,本文通过遍历Intersection即可生成Connector。 Road基于道路中轴线直接生成,一条道路中轴线对应一个Road,基于该道路中轴线产生的Link和Intersection都属于当前Road。 只需要输入道路中轴线矢量数据和路段宽度数据,本文路网语义数据即可全部自动生成。本部分从模型功能对比、路网语义数据生成质量、路网动态编辑能力、路口交通相位信息生成、路网语义数据生成效率等方面分别对本文模型的应用结果进行分析。 本文提出的路网语义模型中,只需要输入道路中轴线数据和道路宽度信息,即可自动生成车道线数据、路口数据以及路口交通相位数据等用于交通仿真。表1为本文模型和已用于交通仿真的路网模型对比结果。可以看出,本文模型不需要提供道路车道线数据和路口数据信息,同样可以自动生成路口交通相位信息。此外,本文模型支持动态编辑修改路网内车道方向、道路宽度,新建道路等,为交通研判提供了非常便捷的底层数据支撑。 表1 模型功能对比示意图 基于本文语义数据中路口Lane的空间相交信息以及交通相位一般规则,可以根据文献[8]提出交通相位生成算法自动生成。 将本文模型用于多个实际区域内路网数据的自动生成。图6和图7分别为某社区和某城区内路网数据生成效果图。上述区域内包含有丁字路口、十字路口、环形路口、以及立交桥等多种道路类型。实验结果表明,只需输入道路中轴线矢量数据和路段宽度数据,本文路网语义数据中Lane,Link,Connection,Intersection以及Road等元素以及路口交通相位信息都可以全部自动生成。部分生成过程及效果如图6和图7所示。和实际中Lane相比,本文方法可以自动生成所有传统Lane,生成路口Lane过程中有不同程度的丢包和冗余。图8为图7的路网区域内,不同宽度路段(单幅车道数目)生成Lane数目和实际车道数目对比示意图。图中正确车道数目、丢包车道数目和冗余车道数目分别为生成的车道和实际中当前位置车辆运行轨迹基本相当、没有生成与实际中当前位置车辆运行轨迹相当的Lane、实际中当前位置没有与当前生成Lane相对应的运行轨迹数据。 图6 某社区路网数据自动生成过程及效果图 图7 某城区路网数据自动生成过程及效果图 图8 不同宽度路段生成Lane数目和实际Lane数目对比关系示意图 从图8可以看出,当单幅车道数目为1时,路网内所有的车辆运行轨迹皆可生成(丢包车道数目为0),仅有少数冗余的车道。原因是本文方法只能采用一些普适性的规则。一些路口处设置了禁止左转/右转等,这些无法通过普适性规则避免掉,所以产生了冗余车道数目。随着车道数目的增多,相应生成的冗余车道以及丢包车道也随之增加,这是因为车道数目增加时,路口Lane的设置更加随机,例如右转车道可以直行、边车道可以直行等。不过,整体来看,本文方法还是能够自动生成绝大多数Lane。 本文分别从路网内车道反向、道路加宽、道路变窄等路网矢量数据方面分析本文模型的动态编辑能力。 (1) 车道反向,即将车道线的方向置反。车道线的方向即为车流的可运行方向。本文的车道仅指传统Lane,且仅支持最内侧车道线方向置反。 单条Lane方向置反,一方面,与邻居Lane关系会发生改变,另一方面,前后关联Intersection内的路口Lane的连接关系也会发生改变。 对于前者,若其存在左右邻居,则直接取消其左右邻居关系,同时更新相应的Link即可。对于后者,由于车道反向仅限于传统Lane,根据本文模型容易得出,和传统Lane连接的Lane必定为路口Lane。于是,对于反向的传统Lane,只需根据4.2节所述,更新与其相交的Intersection内的路口Lane及Connector即可。 图9为反向前后路网传统Lane及路口Lane连接关系示意图。反向前传统的Lane和Intersection关系为“–”,即其起点为Intersection中路口Lane的终点。反向后传统Lane和Intersection的关系为“+”,即其终点为Intersection中路口Lane的起点。图9左图为反向前连接关系示意图;右图为反向后连接关系示意图,箭头表示车道的方向,矩形框表示被反向的车道,黑色加粗路口Lane表示反向前后有变动的路口Lane。需要指出的是,图9左右图的路口Lane皆为自动生成。 图9 反向前后路网传统Lane与路口Lane连接关系示意图 (2) 道路加宽,即增加Link内的传统Lane数目。增加传统Lane后,当前Link内包含的传统Lane数目相应增加,一方面,当前Link内的传统Lane邻居关系会发生变化,另一方面,其前后关联Intersection内的路口Lane的连接关系也会发生改变。 对于前者,增加的传统Lane与其相邻传统Lane互为邻居关系。对于后者,根据4.2节更新传统Lane前后关联Intersection内的路口Lane及Connector。 图10为增加1条传统Lane前后路网传统Lane及单侧路口Lane连接关系示意图。矩形框表示增加车道路段。增加的传统Lane和该侧Intersection的关系为“+,即其终点为Intersection中路口Lane的起点。图10左图为增加车道前连接关系示意图;右图为增加车道后连接关系示意图,箭头表示车道方向,黑色加粗路口Lane表示增加车道前后有变动的路口Lane。需要指出的是,图中左右图的路口Lane皆为自动生成。 图10 增加一条车道前后其所属于Link及其关联路口Lane连接关系示意图 (3) 道路变窄,即删除Link内传统Lane数目。删除传统Lane后,当前Link内包含的传统Lane数目相应减少,一方面,当前Link内的传统Lane邻居关系会发生变化,另一方面,其前后关联Intersection内的路口Lane的连接关系也会发生改变。对于前者,若删除的传统Lane存在左右邻居,则取消其邻居关系。对于后者,根据4.2节更新删除传统Lane前后关联Intersection内的路口Lane及Connector。 图11为删除一条传统Lane前后路网传统Lane及单侧路口Lane连接关系示意图。矩形框表示删除车道路段。删除的传统Lane和该侧Intersection的关系为“+,即其终点为Intersection中路口Lane的起点。图11左图表示删除车道前连接关系示意图;右图为删除车道后连接关系示意图,箭头表示车道方向,黑色加粗路口Lane表示删除车道前后有变动的路口Lane。需要指出的是,图11左右图的路口Lane皆为自动生成。 图11 删除一条车道前后其所属于Link及其关联路口Lane连接关系示意图 本文方法通过计算效率来验证其方法的有效性。测试环境是:Intel(R) Core 8 Xeon(TM)i7-4790 CPU @3.40 GHz and 8.0 GB RAM。 本文基于OpenStreetMap导出的道路中轴线数据生成支持动态编辑的路网语义数据。路网语义数据中Intersection,Connector,Link以及Lane等的规模主要由道路中轴线交点的数目决定。因此,交点的数目对本文语义数据生成时间有很大的影响。图12为双侧两车道情况下,路网语义数据生成时间和道路中轴线交点数目关系示意图。可以看出,随着道路中轴线交点数目的增多,路网语义数据生成时间也随之变长。 图12 路网语义数据生成时间和道路中轴线交点数目关系示意图 此外,Lane的规模还受道路宽度(车道数目)的影响。图13为路网语义数据生成时间对比关系示意图。不难看出:①车道数目对路网语义数据生成时间的影响不大,是因为车道数目仅影响传统Lane的规模,车道数目增大,生成传统Lane的时间增长;②由于本文方法需要对道路中轴线数据进行截取,自动生成路口Lane等,需要较大的工作量。与文献[8]方法相比,本文方法需要更长的时间。不过,作为预处理过程,这一时间长度是可以接受的。 图13 路网语义数据生成时间对比关系图 路网语义数据生成后,可以进行加宽、变窄、逆行等路网语义数据的动态编辑。经编辑后,本文方法仅需计算更新当前相关联Intersection等数据即可,而文献[8]方法需要重新对路网数据进行计算,极其耗时。图14为编辑操作后,本文方法和文献[8]方法更新路网语义所需时长与路网规模之间关系示意图。可以看出,本文方法更新计算的效率远远高于已有方法,且与车道数目无关。事实上,本文方法更新计算时长非常短,甚至可以忽略不计。 图14 路网语义数据动态编辑效率对比示意图 本文给出了一种支持动态编辑的交通路网语义模型。只需输入道路中轴线矢量数据,路网内所有语义数据即可自动生成。本节对该模型进行一些补充说明。 (1) 本文模型中生成Intersection时,是在三维空间中判断道路中轴线是否相交。因此,本文模型输入的道路中轴线矢量数据需要为三维数据。若为二维数据,将会导致立交桥被截断生成平面交叉路口的情形发生。 (2) 本文将道路中轴线向两侧延拓生成的Lane是基于靠右通行的规则。路口处也是基于此计算的连接关系。若想生成基于靠左通行规则的路网,只需将本文中传统Lane生成过程稍作调整,路口Lane生成改为逆时针生成即可,其方法论本质是一致的。 (3) 本文模型只允许对最内侧车道进行方向置反(即设置潮汐车道)才能正确生成。并且,最内侧车道方向置反后,会直接并入对向传统Lane组成的Link,和对向内侧传统Lane互为邻居车道。若实际中存在中央隔离带导致其无法相邻,需要手工强制修改邻居关系。 本文通过分析交通路网内路口和传统路段之间的关联关系,构建了一种支持动态编辑的交通路网语义模型。仅需输入道路中轴线数据,路网语义数据即可全部自动生成。对路网内道路属性进行局部编辑后,仅需少量的计算量即可完成路网语义数据的更新。后续计划将该模型用于交通仿真中,实现可交互的交通管控可视仿真推演。 [1] NISHIDA G, GARCIADORADO I, ALIAGA D G. Example-driven procedural urban roads [J]. Computer Graphics Forum, 2016, 35(6): 5-17. [2] TAAL F C, BIDARRA R. Procedural generation of traffic signs [C]//Eurographics Workshop on Urban Data Modelling and Visualisation. Goslar: Eurographics Association Press, 2016: 17-23. [3] SILVA P B, EISEMANN E, BIDARRA A R, et al. Procedural content graphs for urban modeling [EB/OL]. [2019-08-15].http://dx.doi.org/10.1155/2015/808904. [4] TENG E, BIDARRA R. A semantic approach to patch-based procedural generation of urban road networks [C]//Proceedings of the 12th International Conference on the Foundations of Digital Games. New York: ACM Press, 2017: 71. [5] WILKIE D, SEWALL J, LIN M C. Transforming gis data into functional road models for large-scale traffic simulation [J]. IEEE Transactions on Visualization and Computer Graphics, 2012, 18(6): 890-901. [6] MAO T, WANG H, DENG Z Z, et al. An efficient lane model for complex traffic simulation [J]. Computer Animation and Virtual Worlds, 2015, 26(3-4): 397-403. [7] CURA R, PERRET J, PAPARODITIS N. Streetgen: In-base procedural-based road generation [EB/OL]. [2019-08-15]. https://arxiv.org/pdf/1801.05741.pdf. [8] 王华, 康星辰, 毛天露, 等. 针对车辆群组动画仿真的路网语义模型[J]. 计算机辅助设计与图形学学报, 2014, 26(10): 1818-1826. [9] PARISH Y I H, MÜLLER P. Procedural modeling of cities [C]//Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques-SIGGRAPH. New York: ACM Press, 2001: 301-308. [10] CHEN G, ESCH G, WONKA P, et al. Interactive procedural street modeling [J]. ACM Transactions on Graphics, 2008, 27(3): 103. [11] GALIN E, PEYTAVIE A, GUÉRIN E, et al. Authoring hierarchical road networks [J]. Computer Graphics Forum, 2011, 30(7): 2021-2030. [12] VANEGAS C A, GARCIA-DORADO I, ALIAGA D G, et al. Inverse design of urban procedural models [J]. ACM Transactions on Graphics, 2012, 31(6): 168. [13] CHEN G, ESCH G, WONKA P, et al. Interactive procedural street modeling [J]. ACM Transactions on Graphics, 2008, 27(3): 103. [14] SUN J, YU X, BACIU G, et al. Template-based generation of road networks for virtual city modeling [C]//Proceedings of the ACM Symposium on Virtual Reality Software and Technology. New York: ACM Press, 2002: 33-40. [15] YANG Q, KOUTSOPOULOS H N. A microscopic traffic simulator for evaluation of dynamic traffic management systems [J]. Transportation Research Part C: Emerging Technologies, 1996, 4(3): 113-129. [16] PARAMICS Q. The paramics manuals [EB/OL]. [2019-08-15]. http://www.paramics-online.com/. [17] PTV. VISSIM user manual [EB/OL]. [2019-08-15]. https://www.ptvgroup.com/en/solutions/products/ptv-visum. A Semantic Model of Traffic Networks Supporting Dynamic Editing WANG Hua, HE Xiao-yu (School of Computer and Communication Engineering, Zhengzhou University of Light Industry, Zhengzhou Henan 450000, China) Existing road network modeling methods do not allow users to edit and modify the semantic dataset, such as building a new road, widening and narrowing a road, changing direction of one lane, changing connectivity between lanes, creating reversible lanes and so on. To address the above problems, in this paper, we present a semantic model of traffic networks allowing dynamic editing. We first analyzed the coupling relationship between normal roads and intersections and then presented a hierarchical semantic dataset, which comprises traditional Lane, intersection Lane, Link, Connection, Intersection and Road. After users provide the data of road axis lines, all of the above semantic data can be generated automatically. After dynamic editing and modification of road network traffic attributes, the dynamic updating of semantic data can be completed by decoupling and recalculating the semantics of corresponding road sections and connected intersections. Experimental results show that our model can generate semantic data of road networks efficiently and accurately. It also allows dynamic editing of the semantic data and can generate traffic phase automatically. traffic simulation; road networks’ modeling; dynamic editing; hierarchical semantic TP 751.1 10.11996/JG.j.2095-302X.2019050858 A 2095-302X(2019)05-0858-08 2019-07-25; 2019-08-10 国家自然科学基金项目(61602425,61472370,61502433,61602421,61672469,61402269,61472351);郑州轻工业大学博士科研项目(2015BSJJ007);河南省科技攻关项目(182102311071) 王 华(1982-),女,河南新乡人,讲师,博士,硕士生导师。主要研究方向为虚拟现实、群组动画等。E-mail:wanghua@zzuli.edu.cn3.3 Connector及Road的生成
4 应用及结果分析
4.1 模型功能对比

4.2 路口交通相位信息生成
4.3 路网语义数据生成质量

4.4 路网数据动态编辑能力
4.5 路网语义数据生成效率


5 讨 论
6 结束语