基于卡尔曼滤波的SAR图像边缘检测方法
2019-11-13李占利刘宇琦李洪安
李占利,刘宇琦,孙 瑜,李洪安,张 蕴
基于卡尔曼滤波的SAR图像边缘检测方法
李占利,刘宇琦,孙 瑜,李洪安,张 蕴
(西安科技大学计算机科学与技术学院,陕西 西安 710054)
针对传统Canny边缘检测算法对合成孔径雷达(SAR)图像的相干斑噪声抑制程度太高,导致大量边缘的真实信息丢失问题,提出一种新型Canny算子边缘检测算法。首先建立合适的非对称半平面区域(NSHP)图像模型,将空间模型转换成卡尔曼滤波可适用的系统状态方程;然后用“预测+反馈”的方式对图像去噪;最后通过双阈值算法提取图像的边缘。仿真实验表明,该方法可以有效地抑制SAR图像中的相干斑噪声,同时能较好地保留图像的边缘信息,相对于传统的Canny算法有较好的检测效果。
Canny算子;边缘检测;NSHP;卡尔曼滤波;SAR图像
合成孔径雷达(synthetic aperture radar, SAR)图像是通过雷达的波束对地面目标物信息的向后散射而形成的图像,其色调变化主要根据地面目标的后向散射截面决定。一般像元内表面越粗糙,向后散射就越强,图像亮度也越强。SAR图像具有高分辨、全天候、全天时等工作特点[1],适应于各种条件恶劣的环境下完成侦查任务。先前国外就开始了“运动与静止目标获取与识别”(mixed signal technology, always reliable,MSTAR)项目,对于SAR图像的目标检测与识别受到了国内外研究人员的重视。因此针对SAR图像的边缘进行检测有很重要的研究意义。
图像的边缘就是图像在局部区域有显著变化的部分,该区域的灰度剖面作为一个阶跃,是从一个很小的较为平滑的灰度值区域急剧变化到另外一个灰度差距较大的灰度值。图像的边缘保存了整个图像的重要信息,其对于图像的目标检测、场景识别与理解是特别重要的。经典的边缘检测算子有Prewitt,Sobel,Robert等[2],其实现方法相对简单,对于噪声的抗干扰能力较差,在边缘检测中会产生一些虚假边缘[3],多用于处理灰度渐变和噪声较多的图像。LOG算子作为二阶微分算子,经常出现双边缘像素边界,该方法对噪声比较敏感,主要用来判断图像边缘的明暗区。Canny边缘检测算法主要用于梯度计算边缘的检测,该算法通过高斯滤波的标准差,结合一阶微分导数零交叉的特点对边缘进行定位,在对SAR图像边缘检测中体现出其优势[4]。但Canny算子对高斯噪声处理较好,对于雷达图像非高斯噪声抗干扰性较差。许多学者对该问题进行了研究,文献[4]提出用小波去噪替换Canny算子的高斯滤波,利用广度搜索代替深度搜索进行了改进;文献[5]提出对SAR图像先进行FROST滤波去除相干斑噪声,再融合Canny算子与ROA算子来提取边缘点;文献[6]提出在SAR图像中心构建任意方向对称窗口,然后定义各像素到中心像素距离的核函数,通过计算窗口内像素光谱测度的加权平均值,来选取图像边缘最强值,从而克服噪声影响,提取SAR图像边缘;文献[7]提出用二维分数阶微分的方法采用较小的微分阶数来增强图像中信号频率,减少边缘信息的损失。
边缘检测除了传统一阶、二阶微分算子的方案,近年来出现了SUSAN算法、数学形态算法、模拟退火算法、神经网络及改进算法等。其中神经网络算法需要大量样本训练,易陷入局部最小值,实现成本较高,仍处于实验阶段;模拟退火算法全局搜索能力较差,边缘像素点多数出现不完整线段;数学形态算法需要人工选取单结构元,去燥能力较差。
传统方法相比较实现简单,成本较低且有较好的检测效果,可以快速应用。因此针对传统的Canny算子中的高斯滤波不能很好地解决SAR图像中相干斑噪声,本文提出一种基于卡尔曼滤波的新型Canny算子检测方法。通过建立合适的非对称半平面(non-symmetric half plane, NSHP)区域图像模型[8],构建卡尔曼滤波的系统状态方程,并且经过不断地“预测+反馈”更新参数,从而有效地降噪[9],最后使用保留非极大抑制与双边阈值的方法对SAR图像的边缘信息进行提取。实验表明,本文算法较传统Canny边缘检测算法对SAR图像有更好的检测效果。
1 传统Canny算法原理
Canny算法是一种根据图像梯度值的计算从而进行边缘检测的算法[10]。该算法从高斯滤波开始到最后双边阈值连接完成,主要步骤如下:
(1) 用高斯滤波对图像进行平滑处理,并消除图像噪声;
(2) 通过一阶偏导差分计算滤波处理后图像的梯度幅值及方向;
(3) 对得到的梯度图像进行非极大值抑制;
(4) 通过双阈值算法对图像的边缘进行连接与检测。
1.1 对图像高斯滤波平滑处理
Canny算法中图像的高斯滤波可以用二维高斯核通过一次卷积进行实现,即

1.2 用一阶偏导的差分计算滤波后图像的梯度幅值和方向
传统的Canny算法中采用2×2邻域的灰度梯度值与方向进行一阶有限差分计算,平滑后图像点 (,)处的一阶偏导为


此时(,)处的梯度幅值与方向为

1.3 对梯度幅值图像非极大值抑制
图像的梯度幅值越大,图像增强的越厉害,但不代表是图像的边缘点,因此用非极大值抑制,保留像素点局部变化最大的值,将非极大值点的灰度设置为0,从而剔除不是边缘的点。但是这样的二值图像可能包含许多噪声从而产生假边缘。如图1所示,会有大量虚假的边缘产生,图像边缘线条较模糊。

图1 非极大值抑制图像
1.4 双阈值算法提取边缘
为了减少假边缘,通过双阈值的方法来进一步确定边缘点。首先选择2个阈值分别为高阈值H与低阈值L,若图像的边缘(,)的梯度值大于H,则该点为边缘点,否则不是边缘点。将检测到的边缘点进行连接,对于无法连接的断点通过该点的8邻域点来查找满足的低阈值点,从而不断地查找直到图像的边缘连接闭合。
2 改进的Canny边缘检测算法
2.1 卡尔曼滤波原理
卡尔曼滤波(Kalman filtering)是描述系统状态的动力学方程[11-14],在雷达与计算机视觉领域中应用颇为广泛,通过已有状态的数据来寻找最佳估计值,引入系统方程和观测方程,这是卡尔曼最重要的创新之一。在雷达扫描的SAR图像中,雷达回波信号中使相邻的像素点的灰度值因为相干性产生了随机变化,该变化围绕某一均值进行波动,从而形成了相干斑噪声。在雷达与检测目标相对运动时,大量的散射体会产生不同的路程与径向速度,会使雷达接受信号产生一定的随机起伏,让SAR图像对目标散射测量产生很大的偏差,因此用卡尔曼滤波可以通过“预测+测量反馈”的方法可以很好地解决SAR图像中相干斑噪声干扰。
2.2 模型建立
本文将SAR图像进行存储转换为数字矩阵形式,然后用卡尔曼滤波对其进行处理。在预测与修正的进行中,产生新的观测数据,在更新其数据的同时,可随时计算出新的参数滤波值,从而实时观测结果,处理图像噪声,更新最优图像矩阵即完成了对图像的滤波。
利用卡尔曼滤波去噪,首先需选取合适的图像模型,本实验采用NSHP模型[15],如图2所示。空心圈表示当前像素,其强度值根据周围黑色像素的强度值进行预测,忽略了远距离像素的影响,可以获取图像准确且有用的信息。而卡尔曼滤波是一种递推方式,需要不断地通过已知信息以及预测值来估计当前状态,从而逼近真实值,该模型用信息之间的相关性来传递图像信息的变化,可以满足卡尔曼滤波去构建状态方程与观测方程。

图2 NSHP模型图
用NSHP模型建立的卡尔曼信号模型为

(1) 状态方程,即

(2) 观测方程,即

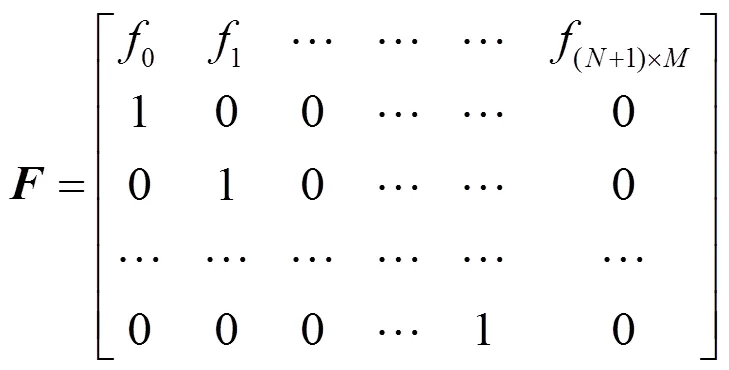
通过NSHP模型系数可以求出的第一行元素值,即
由状态方程和观测方程得到图像的状态空间模型,并结合协方差来估算系统最优化输出,本文使用卡尔曼滤波就可以把原始图像从噪声图像中恢复出来,该模型下卡尔曼滤波的整个过程可以用5个公式进行描述[16]:
(1) 状态一步预测,即

(2) 状态一步预测均方误差阵方程,即

(3) 更新后的方程(滤波状态增益方程),即

计算的增益作为权重,通过权重来决定人为预测值和实际测量值的比例。
(4) 最优化估计,即

在已知预测方差值的情况下,计算最终估计值。
(5) 滤波均方差阵方程,即

计算估计值更新方差,方便下一次的迭代使用。其中,为过程噪声的协方差矩阵;为观测噪声协方差矩阵;为卡尔曼滤波增益;=[0,0,1,0]T,通过自回归运算,可以得到最优图像矩阵。
在迭代过程中,卡尔曼滤波计算负荷相当大,为了提高计算速度,采用NSHP模型简化更新,在更新阶段,只更新当前像素一定距离内的如图2所示的黑色像素,而不需要大面积去更新所有像素造成的影响,该策略明显节省了计算时间,而且不会降低精度。
2.3 改进的Canny边缘检测算法
本文提出的改进算法中卡尔曼滤波去噪的算法流程如下:
步骤1.选择NSHP图像模型,通过图像相关性提取SAR图像主要特征;
步骤2.通过阶模型公式求出图像信息的相关系数,然后求转移矩阵;
步骤3.对矩阵参数初始化;
步骤4.通过状态一步预测方程和状态一步预测均方误差阵方程做进一步预测;
步骤5.通过增益方程和最优化估计进行更新;
步骤6.重复进行预测与更新,最终求出最优结果。
3 实验结果分析
本文实验基于MATLAB平台对SAR图像进行处理和边缘检测(图3),并与传统的Canny边缘检测算法进行对比。

图3 SAR图像的边缘检测
从图3(b)中可以看到传统的Canny算子对SAR图像的相干斑噪声有一定的抑制作用,但是有大量的真实边缘丢失,这是因为Canny算子对图像进行滤波时,没有合理的预测,直接将边缘的高频噪声平滑掉,使得大量细节信息无法检测到。图3(c)是本文算法针对SAR图像做的边缘检测,有大量真实的边缘被检测出来,而且对图中的噪声合理地抑制,使得图像信息保留较为完整。
对SAR图像经过处理继续做对比实验,如图4所示,首先对原始图像加入高斯白噪声,在其干扰下,图像变得特别复杂,传统的Canny算法检测结果中仍存在着大量的噪声;本文算法中,大量的噪声已经被过滤掉,并且减少了虚假边缘。当去掉高斯白噪声,图4(g)是在没有高斯白噪声的干扰下,用传统的Canny算法检测,发现大量未被检测到的边缘信息,而本文算法对应的图4(h)可以清楚地看到漏检的一些船只,码头等信息的轮廓如图4红框所示。
用信噪比对上述图片质量进行量化评价[17-18],具体值见表1。
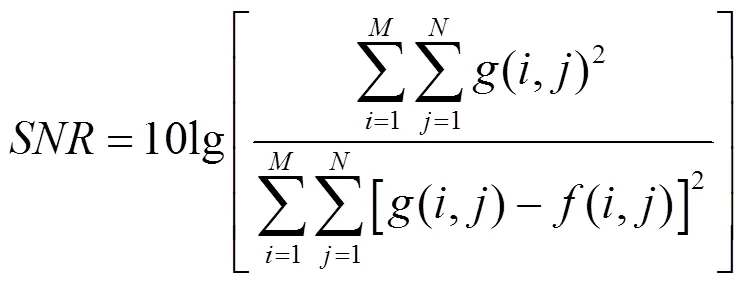
图4(c)的信噪比明显高于图4(b),说明卡尔曼滤波对噪声图像有明显的抑制作用;图4(f)的SNR高于图4(e),由于Canny算子对高斯噪声处理效果较好,而对相干斑噪声的效果不明显,因此本文算法的处理实验效果较为平滑;图4(h)的SNR高于图4(g),高斯滤波不能很好的对相干斑噪声抑制,导致许多边缘细节无法检测到,本文算法的检测结果中,边缘细节更加完整且线条平滑,SAR图像中的主要细节都可以检测出来,因此本文算法最终得到的图片的信噪比较传统算法的高,图像质量较好。
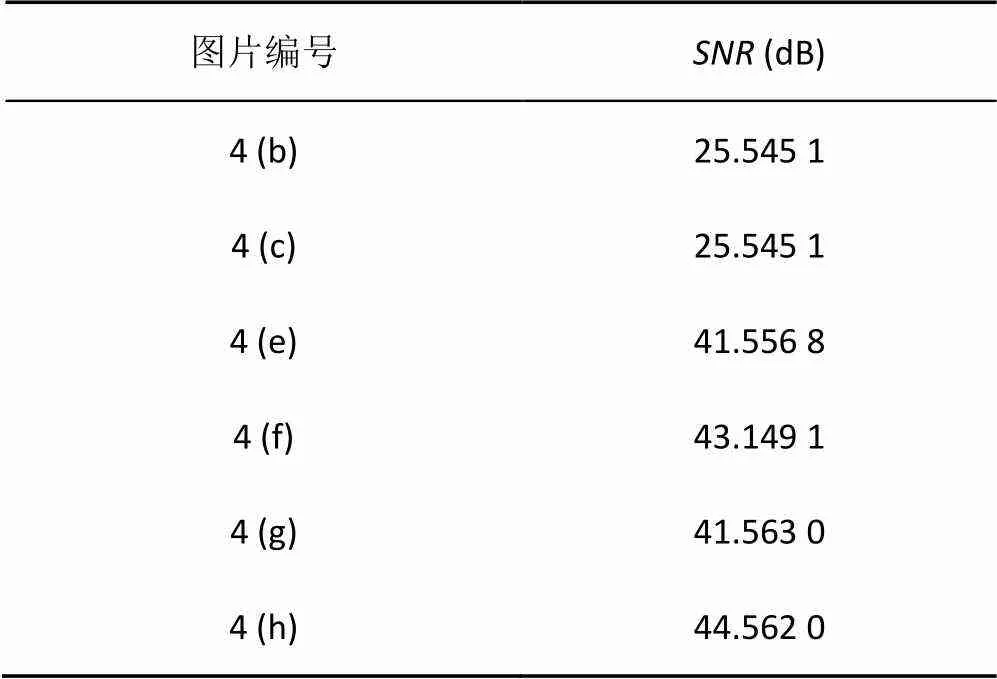
表1 图像的信噪比
本文算法与文献[7]算法进行对比,二者均采用了卡尔曼滤波方法,对Canny算子改进,文献[7]提出二维分数阶微分的方法采用较小的微分阶数来增强图像中信号频率,同时优化信号噪声状态空间模型,该方法对图像中的噪声有一定的抑制,但是雷达扫描的SAR图像中,相邻的像素点因为相干性产生随机变化,需要不断进行调整,固定的分数阶数不适应于SAR图像边缘检测。
本文对SAR图像重新建立模型与卡尔曼滤波实现了动态检测过程,有效地降低了相干斑噪声干扰。常见的定量评估方法有ROC曲线和Pratt系数,为了更好地做对比,本文引用文献[7]中的Abdou-Pratt品质因数对本文算法进行量化评价,即
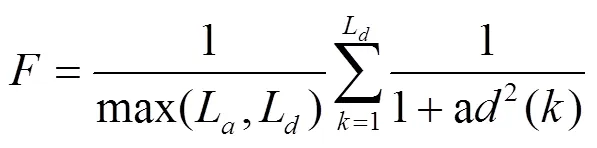
其中,L为实际边缘像素个数;L为检测到的边缘像素个数;()为第个检测到的边缘像素到离其最近的真实边缘像素的距离;a为常量系数,本文取值为1。本文采取局部船只、码头、油桶等容易获取到的轮廓信息进行计算,结果如图5所示。
(a) 高斯噪声下变化趋势
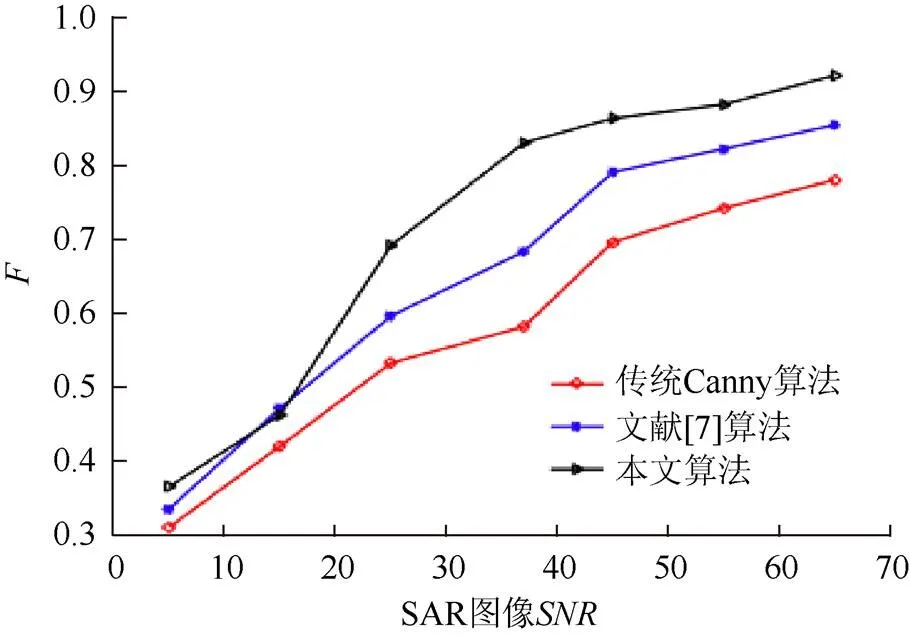
(b) SAR图像F变化趋势
同时本文取20 dB噪声密度下对SAR图像边缘性能进行了有效测试(表2)。
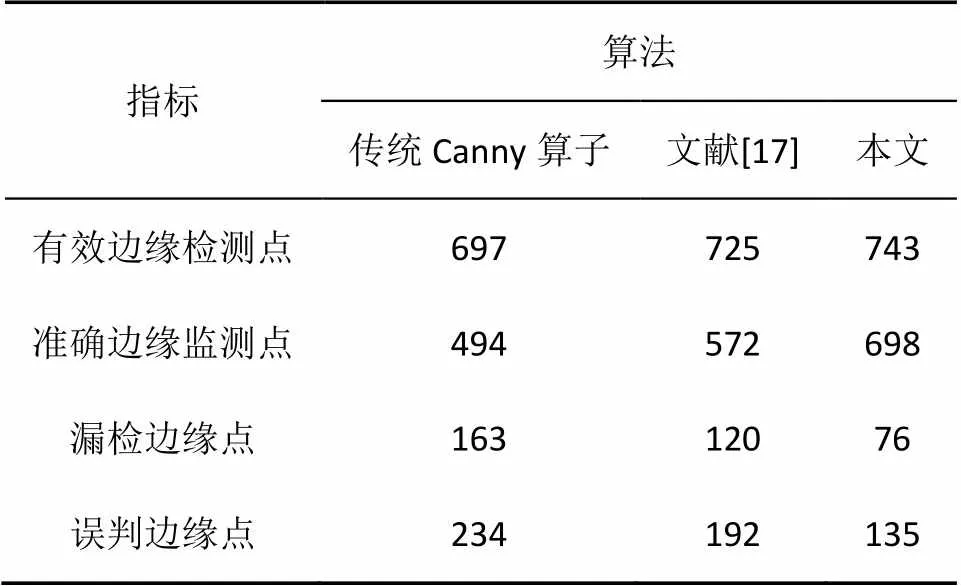
表2 不同算法边缘检测量化测试
表2中本文算法中的漏检边缘点与误判边缘点明显较其他算法低。
本文实验用卡尔曼滤波的方法对SAR图像进行处理,恢复出无噪声图像,然后对该图像进行双阈值检测,从而提取出图像边缘。在实验中可以清楚看到卡尔曼滤波替换了高斯滤波,很好地保留了SAR图像中重要的边缘信息,其中卡尔曼滤波器的原理就是通过当前状态来预测下一个状态,如果对SAR图像进行处理仅通过估计和直接测量的方式,显然效果不会理想。为此本文使用卡尔曼滤波的增益系数来分配2种方式的权重从而得到新的估计值,并且以新的估计值为基础来更新卡尔曼增益系数,从而重新分配权重,通过递推,循环迭代的方式,来逼近真实值。实验结果表明,用卡尔曼滤波“预测+反馈”的方式来去噪,可以对SAR图像中的相干斑噪声合理地抑制,对边缘信息进行了有效的保留,相对于传统方法有明显的提高。因此本文基于卡尔曼滤波的Canny算子边缘检测算法能更好地适用于对SAR图像的边缘检测。
4 结束语
针对传统Canny边缘检测算法在SAR图像中的使用,对相干斑噪声抑制太强导致大量真实边缘信息丢失,从而无法保留SAR图像中关键物体的边缘信息的问题。本文对传统的Canny边缘检测算法进行了改进,结合卡尔曼滤波的特性,有效地抑制了SAR图像中的相干斑噪声,图像信息保留完整且边缘细节处理更加光滑。本文算法简单明了,实用性广,尤其可以将图像进行卡尔曼滤波的操作方法推广到其他应用领域,具备更好地推广应用价值。
[1] 史洪印, 丁郁霏, 赵欣悦, 等. 基于相位恢复原理的SAR振动目标成像方法[J]. 仪器仪表学报, 2017, 38(6): 1531-1539.
[2] 李洪安, 张飞, 杜卓明, 等. 针对合成孔径雷达图像的新型LOG边缘检测算法[J]. 图学学报, 2015, 36(3): 413-417.
[3] 刘剑飞, 左小清, 吴俐民, 等. 结合LOG算子和大津法的遥感影像边缘检测方法[J]. 测绘学报, 2015, 40(1): 107-109, 97.
[4] 柯余仙, 毕思文. 基于量子衍生的遥感图像边缘检测方法[J]. 无线电工程, 2018, 48(11): 966-971.
[5] 付凯城, 张竹馨, 曲毅. 基于Canny-ROA算子和Hough变换的SAR图像道路检测[J]. 现代电子技术, 2016, 39(23): 1-4.
[6] 王岱良, 李玉, 林文杰, 等. 任意方向对称差值核的SAR图像边缘提取算法[J]. 测绘学报, 2017, 46(9): 1165-1173.
[7] 廖强, 董玉廷. 基于改进卡尔曼滤波在Canny边缘检测中的应用[J]. 世界科技研究与发展, 2013, 35(2): 216-219.
[8] 于晓晗, 袁保宗. 对称NSHP模型拟合非因果模型及其一致性估值算法[J]. 电子学报, 1991, 19(5): 114-117.
[9] 陆志毅, 李相平, 陈麒, 等. 基于粒子群优化的卡尔曼滤波去耦算法[J]. 系统工程与电子技术, 2018, 40(4): 751-755.
[10] 李鹏, 蔡玉雷, 陈金立. 采用椭圆算法和Canny算子的超声TOF估计方法[J]. 仪器仪表学报, 2014, 35(10): 2385-2391.
[11] SIMONČIČ S, KLOBČAR D, PODRŽAJ P. Kalman filter based initial guess estimation for digital image correlation [J]. Optics and Lasers in Engineering, 2015, 73: 80-88.
[12] LU Z H, ZHU M Y, YE Q W.Performance analysis of two EM-based measurement bias estimation processes for tracking systems [J]. Frontiers of Information Technology and Electronic Engineering, 2018, 19(9): 1151-1166.
[13] 王好谦, 刘翠, 张颖. 基于块卡尔曼滤波的图像边缘提取方法: 中国, CN103310461A [P]. 2013-09-18.
[14] 邸凯昌, 万文辉, 赵红颖, 等. 视觉SLAM技术的进展与应用[J]. 测绘学报, 2018, 47(6): 770-779.
[15] LEE J H, YANG Y H. Two-dimensional non-symmetric half-plane recursive doubly complementary digital filters [J]. Signal Processing, 2009, 89(10): 2027-2035.
[16] 吴昊, 陈树新, 杨宾峰, 等. 鲁棒的高斯和容积卡尔曼滤波红外目标跟踪算法[J]. 红外与毫米波学报, 2016, 35(1): 123-128.
[17] 闫钧华, 朱可, 张婉怡, 等. 基于显著性图像边缘的全参考图像质量评价[J]. 仪器仪表学报, 2016, 37(9): 2140-2148.
[18] 邵宇, 孙富春, 李洪波. 基于视觉特性的无参考型遥感图像质量评价方法[J]. 清华大学学报: 自然科学版, 2013, 53(4): 550-555.
Edge Detection for SAR Images Based on Kalman Filter
LI Zhan-li, LIU Yu-qi, SUN Yu, LI Hong-an, ZHANG Yun
(College of Computer Application Technology, Xi’an University of Science and Technology, Xi’an Shaanxi 710054, China)
Traditional Canny edge detection algorithm suppresses the speckle noise of synthetic aperture radar (SAR) images too much, causing much loss of real edge information loss. To tackle this problem, this paper proposed a new Canny operator edge detection algorithm. Firstly, the method established a suitable non-symmetric half plane (NSHP) image model, then converted the spatial model into a system state equation applicable to Kalman filter; after that, then we adopted the method of prediction and feedback to denoise the image. Finally, the edge of the image was extracted by dual threshold algorithm. Experimental results show that the proposed method can effectively suppress the speckle noise of the SAR image and preserve the edge information well, and provide better detection effects than traditional Canny algorithm.
Canny operator; edge detection; NSHP; Kalman filter; SAR image
TP 391
10.11996/JG.j.2095-302X.2019050823
A
2095-302X(2019)05-0823-06
2019-06-10;
2019-08-05
陕西省教育厅科研计划项目(17JK0513);陕西省自然科学基础研究计划项目(2019JM-162);西安科技大学博士启动金项目(2019QDJ007)
李占利(1964-),男,陕西周至人,教授,博士,博士生导师。主要研究方向为数字图像处理、计算机视觉。E-mail:lizl@xust.edu.cn
李洪安(1978-),男,山东武城人,副教授,博士,硕士生导师。主要研究方向为图形图像处理与计算机视觉等。E-mail:an6860@126.com