“黑珍珠”波浪滑翔器南海台风观测应用
2019-11-13孙秀军桑宏强
孙秀军, 王 雷, 桑宏强
“黑珍珠”波浪滑翔器南海台风观测应用
孙秀军1, 2, 3, 王 雷1, 桑宏强4
(1. 河北工业大学 机械工程学院, 天津, 300130; 2. 中国海洋大学 物理海洋教育部重点实验室, 山东 青岛, 266100; 3. 青岛海洋科学与技术试点国家实验室 海洋动力过程与气候功能实验室, 山东 青岛, 266237; 4. 天津工业大学 机械工程学院, 天津, 300387)
波浪滑翔器的台风观测技术在国外已经十分成熟并获得广泛应用, 但在国内仍处于技术层面。为拓展波浪滑翔器的应用范围, 国内学者利用“黑珍珠”波浪滑翔器在南海进行了为期17天的海试试验,首次对波浪滑翔器进行了台风观测应用尝试。文中介绍了“黑珍珠”波浪滑翔器的结构组成、工作原理及试验情况, 利用搭载的波浪传感器和声学多普勒流速剖面仪(ADCP)获取了台风经过时的波高、波周期和剖面流速等海洋动力环境数据, 并与浮标数据进行比对分析, 发现两者数据吻合度好、误差低、相关度高, 验证了波浪滑翔器所测数据的准确性, 证明了我国自主研制的“黑珍珠”波浪滑翔器具备极端海况观测的潜能, 填补了我国波浪滑翔器在台风观测应用领域的空白。
波浪滑翔器; 台风观测; 波浪传感器; 声学多普勒流速剖面仪; 相关度
0 引言
波浪滑翔器是一种新型的海洋移动观测平台, 它能够将海洋中无穷无尽的波浪能转化为自身前进的动能, 并具有长航时、智能化及清洁零排放等突出优点。它可长期、自主地执行水文调查、气象预报、通信中继及环境监测等作业任务, 具有巨大的应用前景, 已成为滑翔器领域的研究热点。
美国的Liquid Robotics公司对波浪滑翔器技术的研发已经十分成熟, 其研发的SV2和SV3两种型号波浪滑翔器实现了产品化, 在海洋科学、海洋工程甚至军事领域得到了广泛应用。在2007~2014年间, 美国使用波浪滑翔器对台风进行了多次观测[1-3]。波浪滑翔器不仅在台风“弗洛西”、“桑迪”及“安娜”经过的途中存活了下来, 还将与台风相关的重要数据实时的回传到了陆地, 为科研人员对台风的解析提供了宝贵的数据, 验证了波浪滑翔器在极端海况条件下的应用潜力。
近年来, 国内学者也陆续对波浪滑翔器技术开展了相关研究, 主要有孙秀军[4]、吴小涛[5]和廖煜雷[6]等, 在波浪滑翔器负载能力、航行速度、航行精度、定点锚泊及海洋环境探测等方面取得了一定的研究成果, 但这些研究仍处于技术层面, 对台风观测的应用领域仍处于空白状态。文中介绍了新近完成的我国自主研制的“黑珍珠”波浪滑翔器台风观测应用试验, 通过对有关试验结果的分析, 证明了该波浪滑翔器具备极端海况观测的潜能, 拟为我国台风观测技术提供一种新的研究方向。
1 “黑珍珠”波浪滑翔器
“黑珍珠”波浪滑翔器是由中国海洋大学联合天津工业大学研发的一种具有自主导航能力的海洋移动观测平台[7-9], 其优点表现在: 前进的动力来自波浪; 测量、控制、导航和通信系统的能源来自太阳能; 可实现远海大洋的长时期大范围观测; 可携带声呐、气象站、水下摄像机、温盐深仪、水听器、生物或化学检测仪器等多种传感设备, 以完成各种观测任务[10-16]; 具有铱星通信、全球定位系统(global positioning system, GPS)定位和自主导航控制功能, 可实现大范围、远距离的海气界面环境数据观测, 具有广泛的应用前景。目前, 该滑翔器已经完成了多项长航程测试试验, 在青岛千里岩海域刷新了运行时间最长(近100天)、航行里程最远(达3 600 km)的自主观测记录, 并在南海海域经历了台风极端海况测试(8.5 m浪高)。“黑珍珠”波浪滑翔器具有时间长、航程大、耐受极端海况等特点, 在海洋观测中具有极大的应用潜能。
1.1 结构组成
“黑珍珠”波浪滑翔器整体结构如图1所示。它由以下3部分组成了特殊的双体结构:
1) 水面母船, 设计有低阻外形轮廓, 用作传感、控制及通信的搭载平台并为整体提供浮力;
2) 水下牵引机, 它是整体的动力推进系统, 采用纯机械传动的工作模式, 使得水下牵引机具有无驱动、零排放的特点;
3) 柔性铠装缆, 它是水下牵引机与水面母船动力和信号的主要传递者。其结构参数如表1所示。

图1 “黑珍珠”波浪滑翔器整体结构
1.2 工作原理
如图2所示, 波浪滑翔器通过柔性铠装缆将母船随波浪的起伏运动传递到水下牵引机, 使其上升与下降的过程中迫使水翼产生摆角[17], 同时, 海水的振幅在越靠近海面处就越大[1], 利用这一特性可让母船与水下牵引机产生较大的振幅差, 将水翼所受水动力转化为推力, 推动着牵引机向前运动, 并通过铠装缆拉拽母船前进。
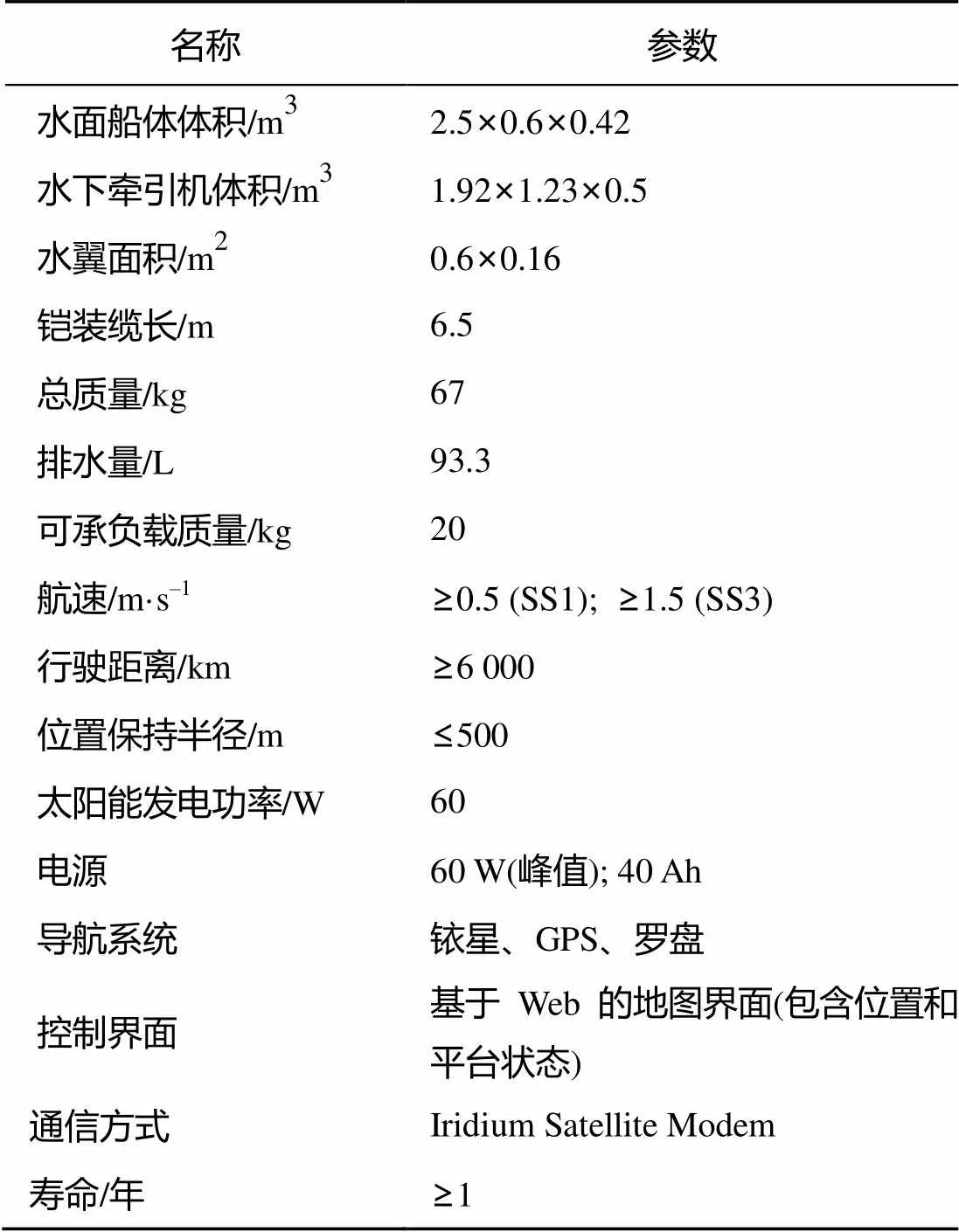
表1 “黑珍珠”波浪滑翔器结构参数
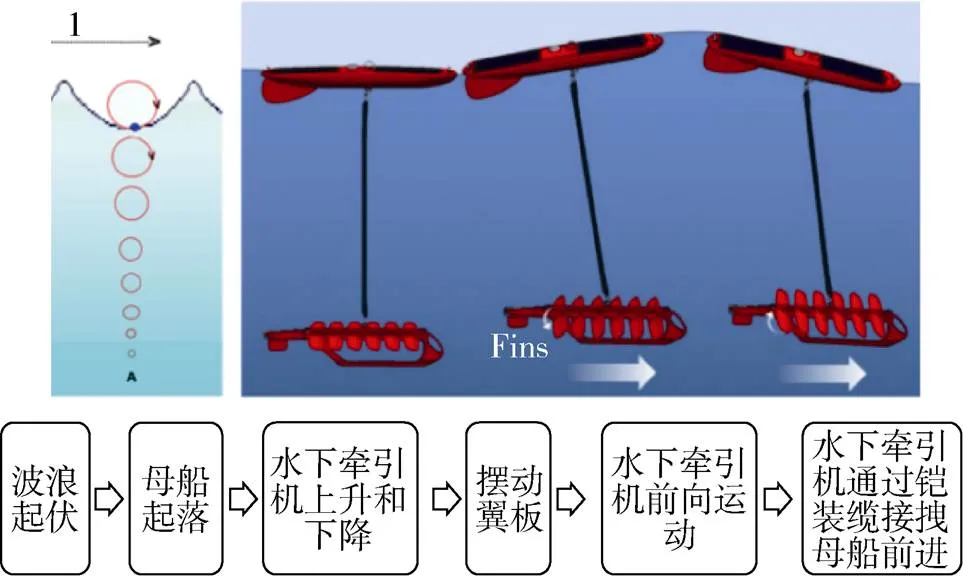
图2 波浪滑翔器工作原理
1.3 搭载传感器
“黑珍珠”波浪滑翔器作为一个海洋移动观测平台, 可根据具体的任务需求搭载不同的高精密传感设备, 通过配置测量和信息传输等功能模块获取海洋环境参数数据。为了探测南海海域的水文数据, “黑珍珠”搭载了声学多普勒流速剖面仪 (acoustic Doppler current profilers, ADCP)、波浪传感器等海洋环境观测传感器, 具体参数指标如表2和表3所示。
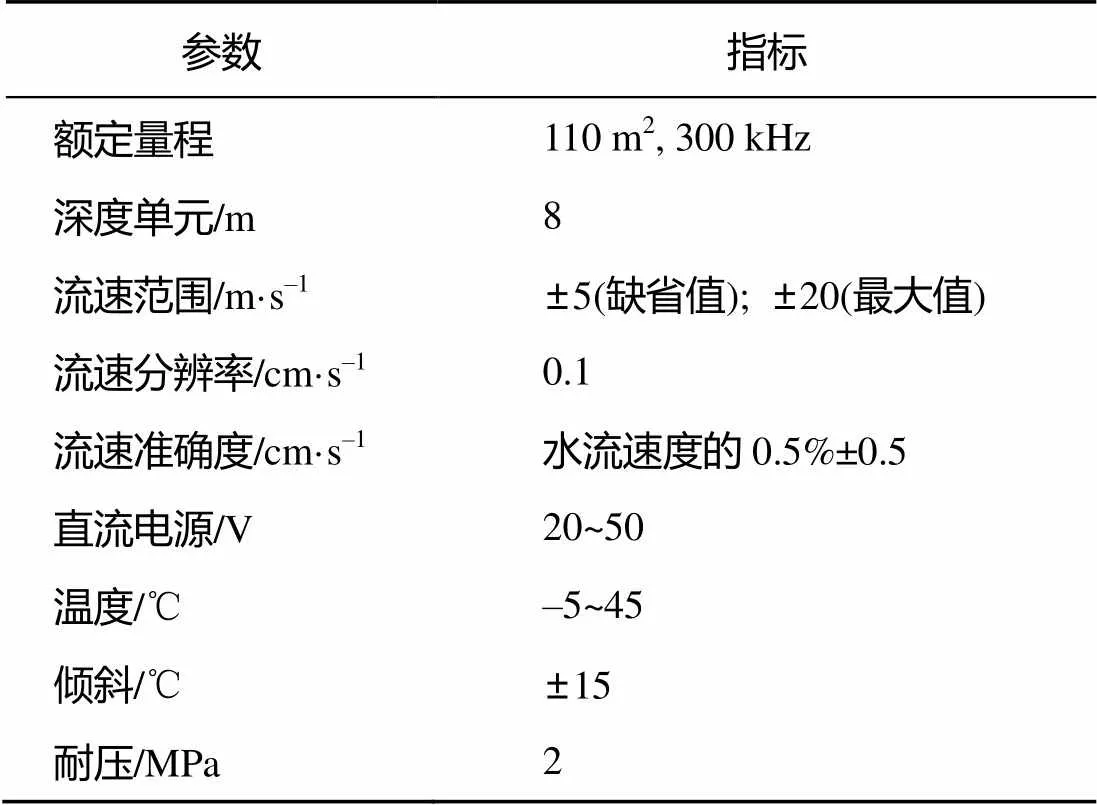
表2 声学多普勒流速剖面仪传感器参数
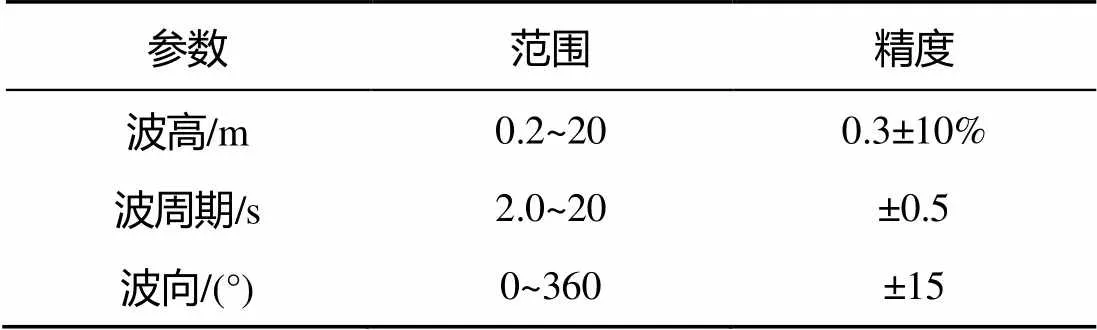
表3 波浪传感器参数
2 南海试验
2.1 试验过程
为保证波浪滑翔器可应用于台风观测中, 需对其生存能力进行验证。由于无法人工模拟出台风时相对应的海况、风速、风向及气压等试验条件, 故直接将波浪滑翔器投入到真实环境, 通过海试得出一个真实、有效的结论。考虑到夏季正值台风多发时段, 决定将海试地点选取在南海东沙群岛附近海域与台风进行“偶遇”, 对“黑珍珠”波浪滑翔器的生存能力进行考验。
2017年8月17日晚7点, 试验船搭载“黑珍珠”波浪滑翔器从汕头经济特区码头出发, 前往180 km东沙群岛海域(经度118.000°、纬度22.000°)布放, 见图3和图4。设定波浪滑翔器航行路径, 并对其进行航行速度、环境参数、波浪数据及可生存浪高等性能指标试验。
2.2 台风观测
2017年8月18日~9月4日海试期间, “黑珍珠”波浪滑翔器先后经历了3次台风(201713“天鸽”(Hato)、201714“帕卡”(Pakhar)及201716“玛娃”(Mawar)), 从图5可知, 3次台风从生成至结束的运动轨迹均掠过东沙群岛海域, 并在该海域风力逐渐上升, 台风等级均达到10~13级, 为“黑珍珠”波浪滑翔器的性能测试提供了天然的试验条件。

图3 波浪滑翔器布放海域及设定路径点

图4 布放现场

图5 台风路径
试验中, 在“黑珍珠”波浪滑翔器行进轨迹 80 km处布置有台湾东沙群岛浮标, 其位置也在台风的影响范围之内, 在台风经过的途中记录下了准确的波浪数据, 为搭载的波浪传感器所测数据的准确性验证提供了依据。图6给出了浮标、波浪滑翔器行进路线及台风路径轨迹的相对位置, 可看出台风“天鸽”、“玛娃”与波浪滑翔器和浮标位置靠得最近, 对其造成的影响也最大。
2.3 设备回收
2017年9月4日, 途经东沙群岛的“科学号”科考船回收了“黑珍珠”波浪滑翔器(见图7), 经检查, 滑翔器结构保持完好, 通信及数据采集运行正常。
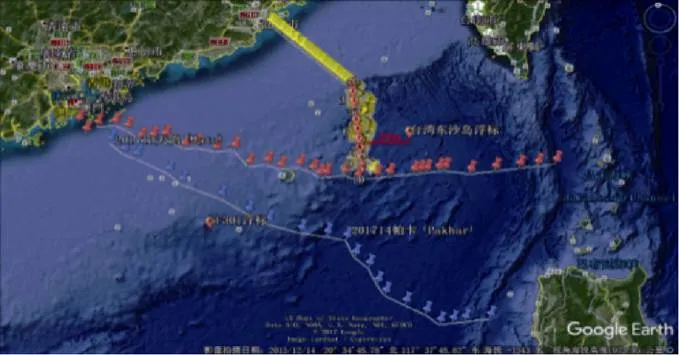
图6 浮标、波浪滑翔器与台风的相对位置

图7 波浪滑翔器回收
3 试验结果及分析
“黑珍珠”波浪滑翔器在试验期间稳定运行了17天, 累计航程约722.5 km, 并在台风极端恶劣海况中成功将数据实时回传到陆地, 为科研工作提供了数据支撑。
3.1 平台状态
图8给出了“黑珍珠”波浪滑翔器各项机能在海试中的运行状态。从图3中可知设定的路径点为直线型, 但由于台风和海流的干扰, 使得波浪滑翔器的航行轨迹与目标点之间产生偏移, 出现如图8(a)所示的曲线轨迹;为保证波浪滑翔器能准确到达设定位置, 导航控制系统会根据GPS实时回传的坐标数据进行航位推算, 得出朝目标点运动的期望航向, 通过与罗盘反馈的当前航向进行对比, 其拟合程度可作为波浪滑翔器的航行是否精准的依据, 从图8(b)中可看出两者拟合程度大体上相同, 在图8(d)中的相关度达到了0.976 5, 误差标准差为16.2°, 说明牵引机的响应速度很快, 可及时调整到正确航向; 另外, 图8(c)的相对误差大多在小范围内波动, 在某个时间段内发生较大的突变, 通过对比牵引机的工作状态(见图8(e)~(f))可知, 当遇到较大海流干扰时, 牵引机会产生较大的运动幅度, 使得航向调节及位姿保持能力变弱, 其航向精度也会受到较大影响, 导致误差突增; 波浪滑翔器通过携带太阳能电池板及可充电锂电池包来满足其导航、控制、通信和有效载荷的电源需求, 其规格如表4所示。图8(g)显示了电池包在充放电状态下的电压变化, 从图中电压周期性的变化可看出, 充电系统状态稳定, 其各种参数如表4所示。另外, 从图中可看出, 电压的最低值为16.5 V左右, 距离欠压恢复电压14.4 V仍有一定的利用空间, 因此可以根据传感器的耗能情况在船体上进行搭载。
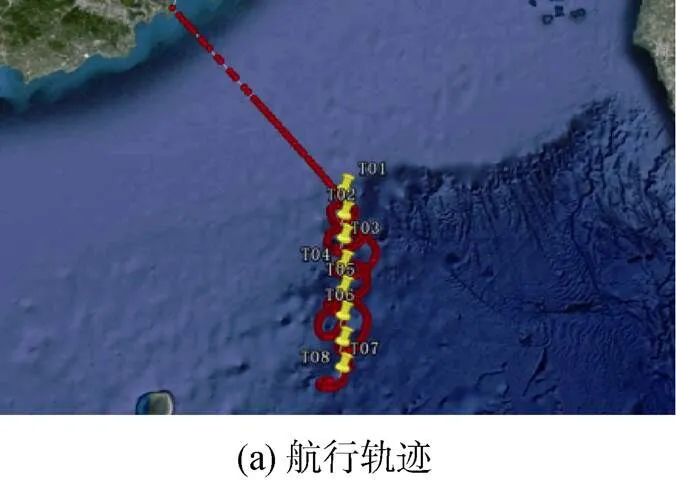
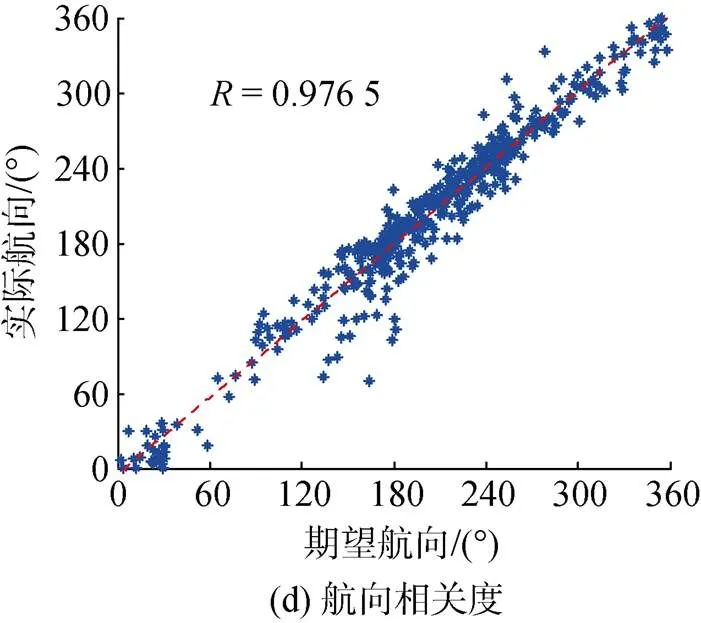
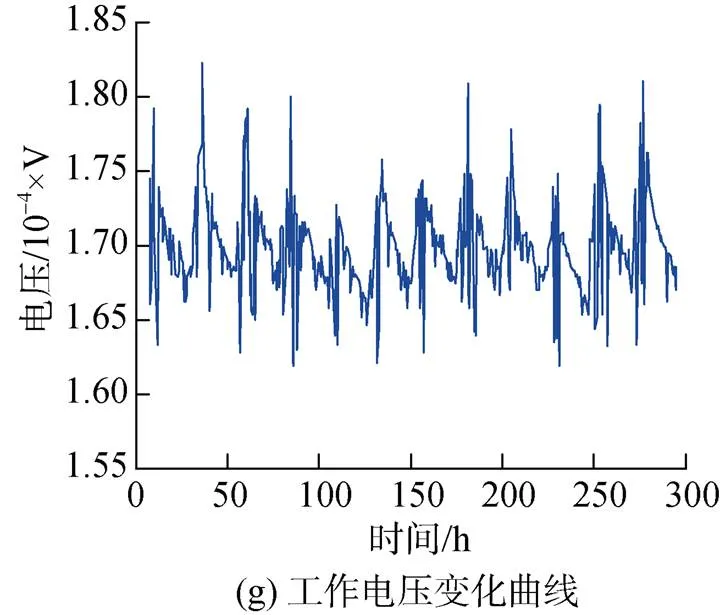
图8 “黑珍珠”波浪滑翔器运行状态

表4 波浪滑翔器充放电系统参数
3.2 浪高分析
图9给出了台风从开始到结束浪高变化的全过程, 其中3次凸起对应的时刻与台风登陆时间(“天鸽”于2017年8月23日登陆南海东北部海面、“帕卡”于8月27日进入南海东部海面、“玛娃”于9月3日进入南海海面)刚好吻合, 并在此时达到最大波高。另外, 从图中可知, “黑珍珠”波浪滑翔器在近9 m的浪高下仍能正常工作, 证明了我国研制的波浪滑翔器应用于台风观测的可行性。
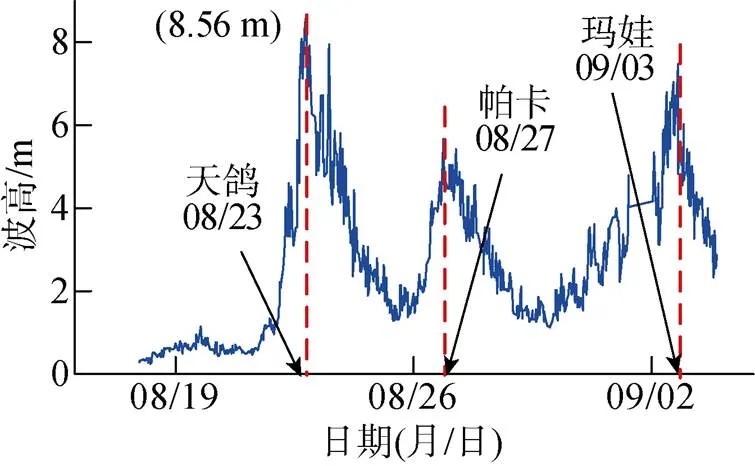
图9 波浪滑翔器载波浪传感器测量的最大波高曲线图
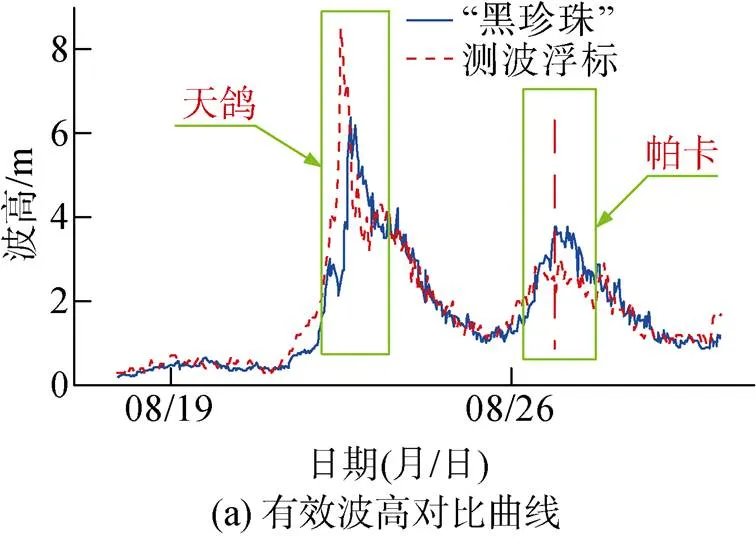
有效波高是按一定规律统计的实际波高值, 具有较好的海面波高代表性。图10为波浪传感器与浮标有效波高的数据对比。如图10(a)所示, 两者的曲线拟合程度较好, 从图10(c)中可看出相关度达到了0.930 2, 数据标准差在0.5 m附近, 说明波浪传感器所测数据具有较高的准确性。同时, 从图10(b)中的有效波高误差曲线中得知, 当浪高较小时对应的浪高误差也很小, 标准差在0.5 m左右, 当浪高变大时浪高误差也会随之增大, 最大误差达到了3.7 m。这是因为浮标可一直处于波峰位置, 而波浪滑翔器的母船与波峰之间会因海况的不同而拉开一段距离。由于波浪滑翔器会因牵引机的重力及所受水动力而潜入水中, 当海况很小时, 母船与波峰距离很小, 两者所测数据误差也相对较小; 但当海况较大时, 母船与波峰之间的距离会随之加大, 使得两者所测数据误差变大, 同时, 波浪滑翔器与浮标之间的距离相距较远, 波浪的起伏情况也会有所不同, 加大了两者的数据误差。
通过图11(a)给出的浮标与波浪滑翔器所测波周期的数据对比可知, 波浪滑翔器与浮标所测波周期曲线拟合情况较好, 起伏一致, 图11(c)中的数据相关度有0.879 4, 数据误差标准差在0.5 s, 可看出波浪传感器所测波周期数值具有一定的参考价值。另外, 从图11(b)误差曲线上来看, 台风经过的前后时间段内两者的误差范围大多保持在±1 s的区间内, 标准差为0.5 s; 在最大浪高附近的波周期误差较大, 有2.6 s, 说明台风的出现会局部导致误差突增, 虽然传感器波周期测量较为稳定, 但测量精度仍需进一步提高。
3.3 海流分析
海流在剧烈台风的强迫力场作用下, 流速发生异常变化, 绕着台风中心呈环状流动。图12给出了海流不同流层流速、方向及密集程度的ADCP实测数据, 可作为台风强度、尺度分析研究基础数据。
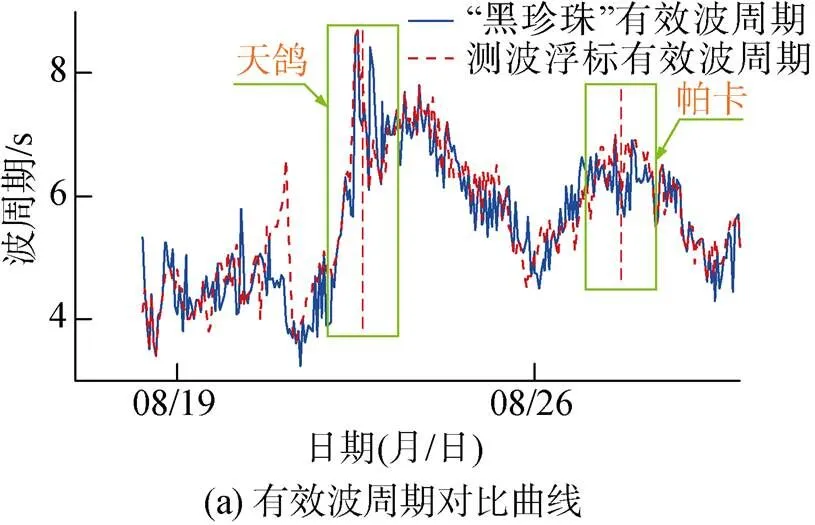

图12 声学多普勒流速剖面仪剖面测流
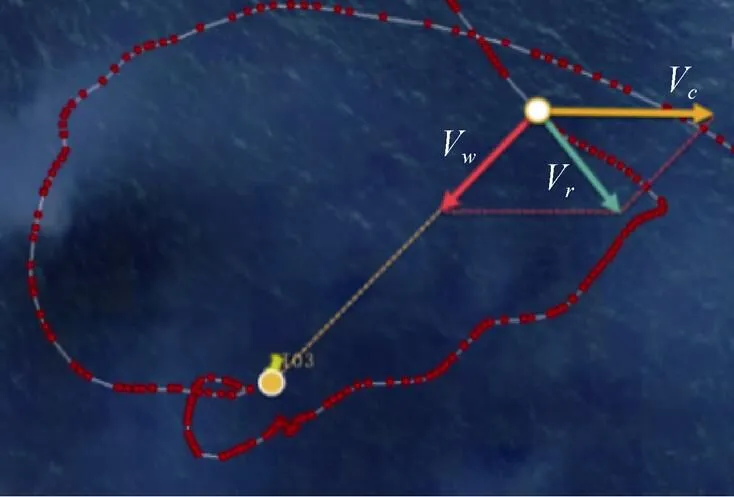
图13 船速矢量分解

图14 航行轨迹上的流向变化
4 结束语
“黑珍珠”波浪滑翔器在我国南海历经为期17天的海试试验, 是我国波浪滑翔器近距离台风观测的首次尝试, 填补了台风观测应用领域的空白。该试验经历了3 次台风海况, 创下了8.5 m的浪高记录, 并成功获取了海洋动力环境数据, 环境测量数据可信, 验证了“黑珍珠”波浪滑翔器在极端海况下的生存能力及台风观测的可行性, 标志着我国自主研制的波浪滑翔器已具备了一定的极端海况观测能力。由于该试验过程中未搭载气象站及水面温盐等传感器, 无法全方位描述台风特征。后续研究中, 将根据台风观测需要, 针对“黑珍珠”波浪滑翔器做进一步改进。
[1] Hine R, Willcox S, Hine G, et al. The Wave Glider: A Wave-Powered Autonomous Marine Vehicle[C]//Institute of Electrical and Electronics Engineers, Marine Technology for Our Future: Global and Local Challenges(OCEANS 2009), Biloxi, MS, USA: IEEE, 2009.
[2] Wiggins S, Manley J, Brager E, et al. Monitoring Marine Mammal Acoustics Using Wave Glider[C]//Oceans. Seattle. WA, USA: IEEE, 2010:1-4.
[3] Manley J, Willcox S. The Wave Glider: A Persistent Platform for Ocean Science[C]//Oceans. Sydney, NSW, Austr- alia: IEEE, 2010: 1-5.
[4] 桑宏强, 李灿, 孙秀军. 波浪滑翔器纵向速度与波浪参数定量分析[J]. 水下无人系统学报, 2018, 26(1): 16-22.Sang Hong-qiang, Li Can, Sun Xiu-jun. Quantitative Ana- lysis on Longitudinal Velocity and Wave Parameter of Wave Glider[J]. Journal of Unmanned Undersea Systems, 2018, 26(1): 16-22.
[5] 吴小涛. 由海洋环境要素预估波浪滑翔器速度[J]. 水雷战与舰船防护, 2015, 23(1):70-76.Wu Xiao-tao. Predicting Wave Glider Speed from Environmental Measurements[J]. Mine Warfare & Ship Self-Defence, 2015, 23(1):70-76.
[6] 廖煜雷, 李晔, 刘涛, 等. 波浪滑翔器技术的回顾与展望[J]. 哈尔滨工程大学学报, 2016, 37(9): 1227-1236.Liao Yu-lei, Li Ye, Liu Tao. Unmanned Wave Glider Technology: State of the Art and Perspective[J]. Journal of Harbin Engineering University, 2016, 37(9): 1227-1236.
[7] Manley J, Willcox S. The Wave Glider: A New Concept for Deploying Ocean Instrumentation[J]. IEEE Instrumenta- tion & Measurement Magazine, 2010, 13(6): 8-13.
[8] Daniel T, Manley J, Trenaman N. The Wave Glider: Enabling a New Approach to Persistent Ocean Observation and Research[J]. Ocean Dynamics, 2011, 61(10): 1509-1520.
[9] Li C, Sang H, Sun X, et al. Hydrographic and Meteorological Observation Demonstration with Wave Glider “Black Pearl”[C]//National Natural Science Foundation of China, Robotics and Applications: 10th International Conference. Wuhan, China: ICIRA, 2017.
[10] Willcox S, Meinig C, Sabine C L, et al. An Autonomous Mobile Platform for Underway Surface Carbon Measurements in Open-ocean and Coastal Waters[C]//Institute of Electrical and Electronics Engineers, Marine Technology for Our Future: Global and Local Challenges(OCEANS 2009). Biloxi, MS, USA: IEEE, 2009.
[11] Niiler P P, Sybrandy A S, Bi K, et al. Measurements of the Water-following Capability of Holey-sock and TRISTAR Drifters[J]. Deep Sea Research Part I Oceanographic Research, 1995, 42(11-12): 1951-1964.
[12] Ralph E A, Niiler P P. Wind-Driven Currents in the Tropical Pacific[J]. Journal of Physical Oceanography, 1999, 29(9): 2121-2129.
[13] Wiggins S, Manley J, Brager E, et al. Monitoring Marine Mammal Acoustics Using Wave Glider[C]//Oceans. Seattle, WA, USA: IEEE, 2010: 1-4.
[14] Frolov S, Bellingham J, Anderson W, et al. Wave Glider—A Platform for Persistent Monitoring of Algal Blooms[C]// Oceans. Waikoloa, HI, USA: IEEE, 2011: 1-5.
[15] Van L V, Baeye M. Wave Glider Monitoring of Sediment Transport and Dredge Plumes in a Shallow Marine Sandbank Environment[J]. Plos One, 2015, 10(6): e0128948.
[16] Bingham B, Kraus N, Howe B, et al. Passive and Active Acoustics Using an Autonomous Wave Glider[J]. Journal of Field Robotics, 2012, 29(6): 911-923.
[17] 李小涛, 王理, 吴小涛, 等. 波浪滑翔器原理和总体设计[J]. 兵器装备工程学报, 2013, 34(12): 128-131.Li Xiao-tao, Wang Li, Wu Xiao-tao, et al. Principle and System Design of a Wave Glider[J]. Journal of Sichuan Ordnance, 2013, 34(12): 128-131.
Application of Wave Glider “Black Pearl” to Typhoon Observation in South China Sea
SUN Xiu-jun, WANG Lei, SANG Hong-qiang
(1.School of Mechanical Engineering, Hebei University of Technology, Tianjin 300130, China; 2. Physical Oceanography Laboratory, Ocean University of China, Qingdao 266100, China; 3. Laboratory of Marine Dynamics and Climate Function,Pilot National Laboratory for Marine Science and Technology(Qingdao), Qingdao 266237, China; 4. School of Mechanical Engineering, Tianjin Polytechnic University, Tianjin 300387, China)
Typhoon observation technology of wave glider has been widely used abroad, however this technology is still at technical level in China. In order to expand the application scope of wave glider, the Chinese scholars carried out a 17-day sea trial of the wave glider “Black Pearl” in the South China Sea for typhoon observation. In this paper, the structure, working principle and test of the wave glider are introduced. The oceanic dynamic environment data such as wave height, wave period and cross-section velocity are acquired through the wave sensor and acoustic Doppler current profilers(ADCP). By comparing and analyzing the measured data with the buoy data, it is found that they agree well with low error and high correlation degree, verifying the measurement accuracy of the wave glider. This study proves that the wave glider “Black Pearl” developed independently by Chinese has potential application in extreme sea condition observation, and fills the gap of applying wave glider to typhoon observation in China.
wave glider; typhoon observation; wave sensor; acoustic Doppler current profilers(ADCP); correlation degree
TJ630; U674.941; O353.2
A
2096-3920(2019)05-0562-08
10.11993/j.issn.2096-3920.2019.05.012
孙秀军, 王雷, 桑宏强. “黑珍珠”波浪滑翔器南海台风观测应用[J]. 水下无人系统学报, 2019, 27(5): 562-569.
2018-10-25;
2018-12-18.
国家重点研发计划重点专项(2017YFC0305902); 青岛海洋科学与技术国家实验室“问海计划”项目(2017WHZZB 0101); 天津市自然科学基金重点基金(18JCZDJC40100).
孙秀军(1981-), 男, 教授, 主要研究方向为海洋移动观测平台技术.
(责任编辑: 杨力军)
