基于水下滑翔机的海洋声学背景场观测技术
2019-11-13尹云龙杨绍琼刘玉红牛文栋
尹云龙 , 杨 明 , 杨绍琼,3, 刘玉红,3, 牛文栋,4*
基于水下滑翔机的海洋声学背景场观测技术
尹云龙1,2, 杨 明1, 杨绍琼1,2,3, 刘玉红1,2,3, 牛文栋1,4*
(1. 天津大学 机械工程学院, 天津, 300350; 2. 天津大学 青岛海洋技术研究院, 山东 青岛, 266237; 3. 青岛海洋科学与技术试点国家实验室 海洋观测与探测联合实验室, 山东 青岛, 266237; 4. 清华大学 机械工程学院, 北京, 100084)
水下滑翔机作为新型水下无人平台,具有对海洋环境噪声进行长时序,大范围稳定观测能力。文中通过开展水听器与水下滑翔机集成应用研究,设计完成了具备海洋环境噪声测量能力的声学观测型水下滑翔机。基于水听器工作原理与水下滑翔机运动约束, 并根据商用计算流体力学软件对流体水动力参数的计算结果, 优化了水听器在水下滑翔机本体的安装位置。通过建立声学观测型水下滑翔机动力学模型,进行了运动仿真并确定最优运动参数, 并于2019年5月在我国南海某海域进行了海上试验应用,获取了大量的水下滑翔机自噪声与海洋环境噪声数据。海上试验数据分析结果验证了声学观测型水下滑翔机的运动稳定性及其海洋声学背景场的观测能力。
水下滑翔机; 声学观测; 海洋环境噪声; 自噪声; 动力学模型
0 引言
海洋声学背景场既存在海洋环境噪声, 又受到声信号的干扰, 从而限制了相关设备的声通信能力。通过海洋声学背景场的观测可反演相关海洋现象, 具有重要的科学意义。海洋环境噪声随着时间、位置和海况的变化而变化, 对海洋环境噪声进行长时间、大范围的观测是非常必要的[1]。常用的海洋声学背景场的观测方式主要有: 基于测量船的测量方法; 基于浮标、潜标的测量方法; 基于岸基声呐的测量方法[2]。但是以上方法都无法满足对海洋环境噪声进行长时间、大范围的连续观测, 这就要求寻求新的观测途径。
水下滑翔机是一种新型水下无人平台, 可集成搭载新型传感器, 它依靠调节自身浮力, 可完成上浮与下潜运动, 具有长时序、大范围、低功耗和高隐蔽性等特点[3]。与传统观测方式相比, 在海洋声学背景场的观测应用中, 集成搭载水听器的水下滑翔机具有明显的优势[4]。同时, 通过路径规划, 可让其按照预设路径进行观测应用。因此, 声学观测型水下滑翔机已成为海洋声学背景场观测的研究热点。
近年来, 国外已经开展了将声学载荷与水下滑翔机进行集成的应用研究。声学观测型水下滑翔机搭载有水听器和声学数据采集处理系统, 具有独特的驱动方式, 以及低功耗、低噪声的优点, 在海洋声场观测方面优势明显。例如, Ferguson 等[5]将单路水听器与水下滑翔机进行集成, 并于2009年5月对水下滑翔机本体噪声和海洋环境噪声进行了海试测量, 通过数据分析发现: 当水下滑翔机滑翔速度低于0.5 m/s时, 水动力产生的噪声可以忽略。2010年5月, 美国Slocum水下滑翔机通过搭载水听器,在West Mata进行海底火山检测, 数据分析结果验证了其观测效果[6]。法国ACSA公司将水下声学定位系统与Sea Explorer水下滑翔机进行集成[7], 实现了水下滑翔机的水下定位。2017年, 英国国家海洋学中心(national oc- eanography centre, NOC)利用集成搭载有水听器的多台水下滑翔机在苏格兰北部深海组成声学观测网, 成功观测到海洋哺乳动物的声音信号。
我国在水下滑翔机理论研究与技术开发方面虽然起步较晚, 但发展迅速。目前, 天津大学、中船重工第710研究所、中国科学院沈阳自动化研究所、浙江大学及上海交通大学等单位已陆续开展相关研究[3], 但是对面向海洋背景噪声测量的声学观测型水下滑翔机的研究还较少。2016年, Liu等[1]将自噪声采集系统与天津大学“海燕”水下滑翔机进行集成并进行了相关海试。文中以天津大学自主研发的Petrel-II水下滑翔机为主体, 开发设计出了面向海洋声学背景场噪声测量的声学观测型水下滑翔机, 并在我国南海进行了相关海上试验研究, 获得了水下滑翔机本体噪声数据和重要的海洋环境背景噪声数据。
1 水听器与水下滑翔机集成布局优化设计
声学观测型水下滑翔机是由双路水听器与水下滑翔机集成而成。由于水听器具有指向性, 同时考虑水下滑翔机的整体水动力, 水听器布局在水下滑翔机轴向前端与后端。当水听器距离水下滑翔机本体越远时, 水下滑翔机本体产生的流噪声与本体机械噪声对其的影响越小。但同时也对水下滑翔机的稳定性影响越大, 所以需要采用商用计算流体力学(computational fluid dynamics, CFD)软件计算出水听器在水下滑翔机上不同安装距离时的流场信息, 得出水听器距离水下滑翔机本体的最优距离。
为了方便计算, 将声学观测型水下滑翔机进行简化, 整体分为水下滑翔机主体、前水听器、后水听器、机翼和天线等5个部分, 其三维模型如图1所示。
声学观测型水下滑翔机简化模型所用的流体计算区域选择为圆柱体, 水域入口距离水下滑翔机头部为滑翔机总长的3倍; 流体区域出口距离水下滑翔机尾部为滑翔机总长的5倍; 水域直径为水下滑翔机翼展展长的10倍。流体区域的入口设定为速度入口(inlet), 出口设定为自由流(out- flow), 边界设定为对称(symmetry), 声学观测型水下滑翔机主体表面设定为静止的壁面(wall), 如图2所示。
图2 声学观测型水下滑翔机网格划分示意图
假设水听器长度为, 前水听器安装位置由水下滑翔机本体前端与水听器后端距离决定, 后水听器安装位置由水下滑翔机本体后端与水听器前端距离决定。在设定滑翔速度=1 kn, 攻角= 5°时, 采用商用CFD软件分析不同安装位置下, 声学观测型水下滑翔机速度流场云图, 结果如图3所示。
图3 不同安装位置下声学观测型水下滑翔机局部速度场分布
图3结果表明, 在水下滑翔机本体前端、后端与前水听器和后水听器的位置都出现了流速变化, 流动出现分离。当后水听器与水下滑翔机后端距离变小(图3(a)~(c)), 和前水听器与水下滑翔机前端距离变大时(图3(d)~(g)), 水听器与水下滑翔机的流速变化区都呈现出分离加快的趋势, 水下滑翔机对水听器的影响降低。水听器通过感知压力的变化进行声学信号采集, 因此, 为了降低水下滑翔机本体对水听器信号采集的影响, 应将水听器的流速变化区尽量与水下滑翔机分离, 所以, 水听器的最佳集成位置是前水听器距离水下滑翔机本体前端距离为3的位置, 后水听器以在距离水下滑翔机本体后端距离为0.5的位置为宜(图3(h))。
2 声学观测型水下滑翔机动力学建模
由于声学观测型水下滑翔机对其滑翔速度有一定的要求, 当其速度低于0.5 m/s时, 水动力产生的噪声可以忽略。所以需通过建立动力学模型, 优化控制参数, 使其滑翔速度小于0.5 m/s。
根据动量定理和动量矩定理, 对声学观测型水下滑翔机进行六自由度动力学建模, 利用动力学模型分析其在纵平面内的运动行为。声学观测型水下滑翔机纵平面运动是指以其浮心为坐标原点的体坐标系-内围绕轴转动和平移运动的合运动[8]。忽略海流的干扰作用, 水下滑翔机的横滚角为0, 潜航模式下的剖面运动即为纵平面运动。
建模时作如下假设: 1) 忽略地球的自转及曲率, 视其为静止的平面; 2) 假设海水是静止的, 忽略海流等的作用。根据以上假设, 建立声学观测型水下滑翔机坐标系如图4所示。

图4 声学观测型水下滑翔机坐标系
图4中共有2个坐标系: 与大地连在一起的地坐标系和与水下滑翔机本体连接在一起的体坐标系。水下滑翔机位置由体坐标原点在地坐标系中位置(,,)和体坐标系坐标轴相对地坐标系坐标轴的空间角(,,)共同决定。为了简化分析, 可以将声学观测型水下滑翔机简化成由可移动质量块、浮力模块内油囊、浮力模块外油囊与其余质量4个部分组成[9], 简化模型如图5所示, 各参数含义见表1。
图5 声学观测型水下滑翔机动力学简化模型

表1 声学观测型水下滑翔机各参数含义
因此, 根据动量矩定理与动量定理, 推导出声学观测型水下滑翔机动力学方程[10](纵平面内)如下
声学观测型水下滑翔机的运动学方程如下

通过CFD计算和相关测量, 可得出声学观测型水下滑翔机的相关参数值, 如表2所示。


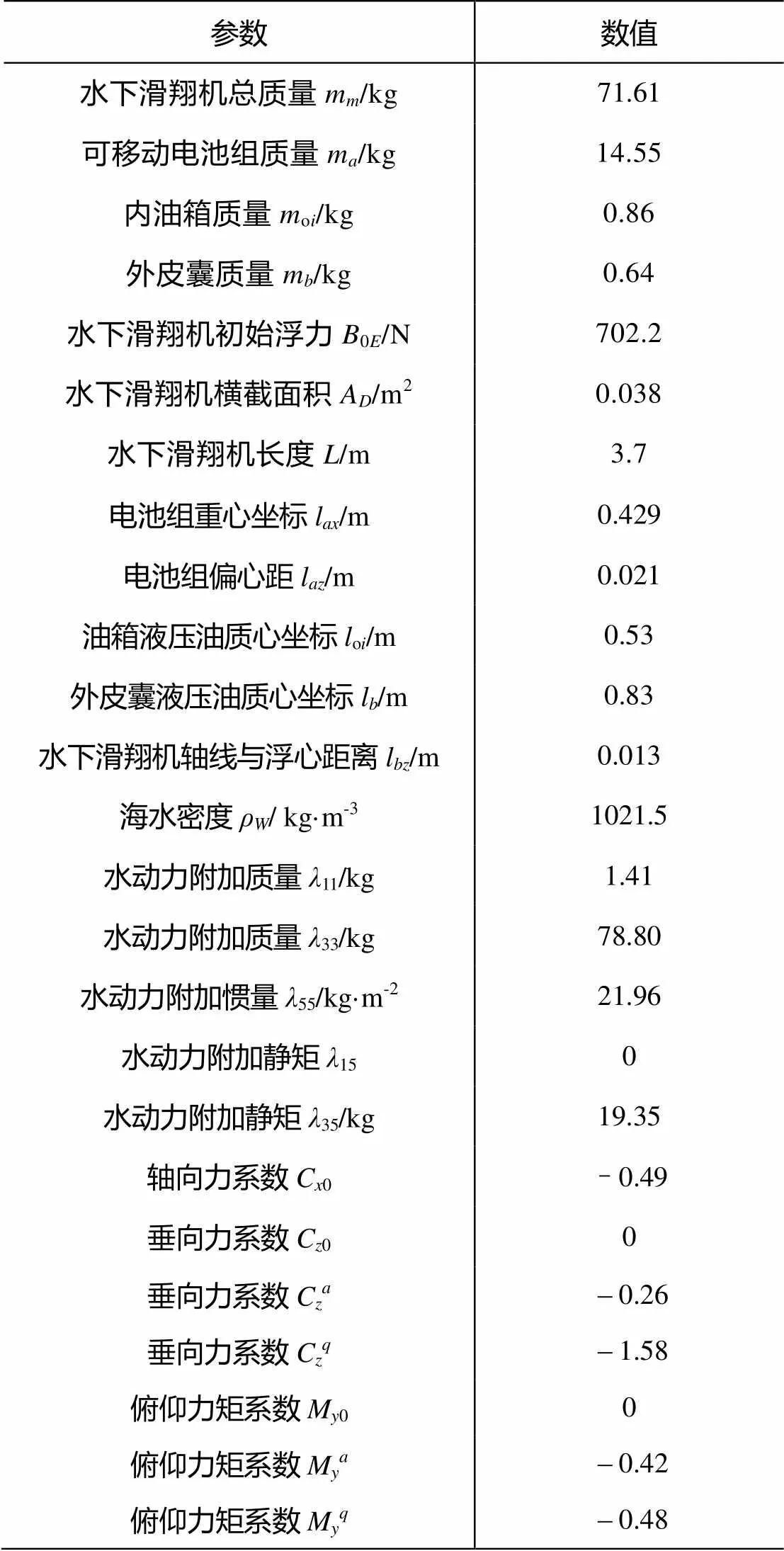
表2 声学观测型水下滑翔机物理与水动力学参数值
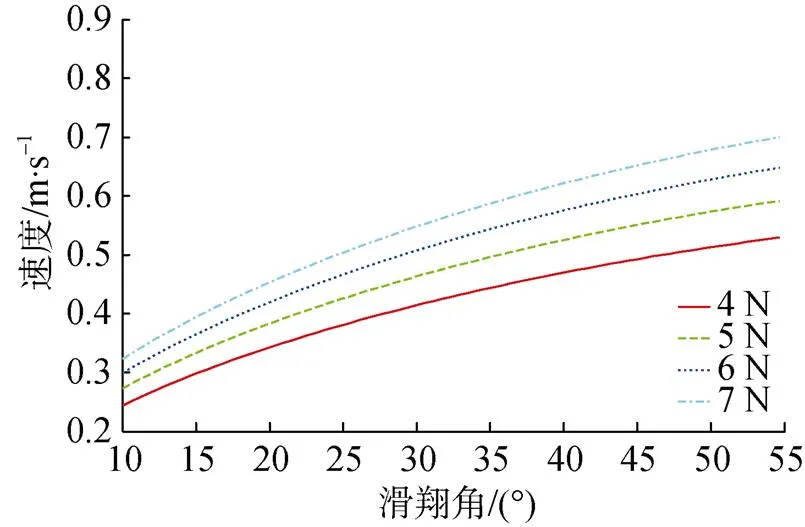
图6 在不同净浮力下声学观测型水下滑翔机滑翔速度与滑翔角的关系图
3 海试试验及数据分析
为了验证声学观测型水下滑翔机的运动性能及其对海洋声学背景场的观测能力, 2019年5月, 天津大学在我国南海某海域进行了海上试验, 如图7所示。在海试过程中, 声学观测型水下滑翔机按预设轨迹进行锯齿状滑翔运动, 利用集成搭载在滑翔机本体上的水听器, 可以采集到滑翔机下潜与上浮各个动作时的自噪声和海洋环境背景噪声。声学观测型水下滑翔机共无故障连续稳定运行13天, 采集到93个剖面的声学数据。文中选取其中第46~50共5个剖面, 对滑翔机的运动性能进行分析, 结果如图8与图9所示。
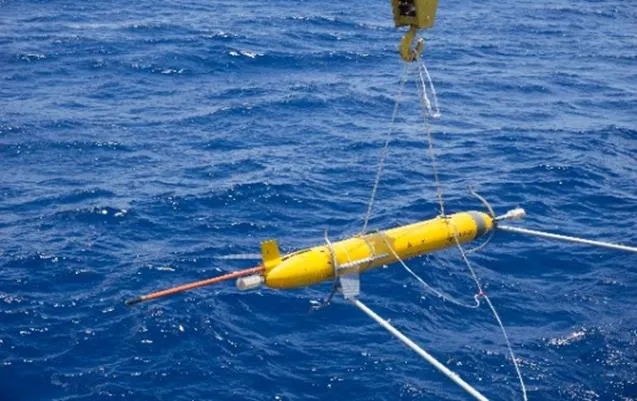
图7 声学观测型水下滑翔机海试现场

图8 选取第46~50剖面深度与时间关系的海上试验与运动仿真结果对比曲线
图8给出了声学观测型水下滑翔机深度与工作时间关系的海上试验与仿真结果对比图。通过对比可知, 文中建立的动力学模型可以很好反应水下滑翔机的运动状态。从图8中试验数据的分析结果可知, 水下滑翔机滑翔过程平稳, 未出现深度方向上的震荡现象, 下潜深度都在900 m以下, 最大下潜深度为955 m(第50剖面)。声学观测型水下滑翔机俯仰角与时间的关系图(图9(a))表明, 当把俯仰角设置为20°时, 水下滑翔机在稳定滑翔过程中可以很好地将其俯仰角控制在20°左右。航向与时间的关系图(图9(b))表明, 声学观测型水下滑翔机可以很好地将航向保持在目标航向附近。进一步分析发现, 声学观测型水下滑翔机在下潜阶段航向调节比较频繁, 航向总是朝大于目标航向的方向偏移, 该偏移可能是因为在航行过程中横滚方向没有平衡, 存在偏向力导致。因此, 可以通过内部的可移动质量块在横滚方向给一定的偏转量补偿, 使其在横滚方向到达动平衡。图9(c)是指垂直方向的速度与时间的关系图, 可以发现: 声学观测型水下滑翔机在稳定滑翔阶段, 垂直速度可以很好地保持在0.2 m/s左右, 滑翔速度较稳定, 可以很好地进行海洋声学背景场观测。
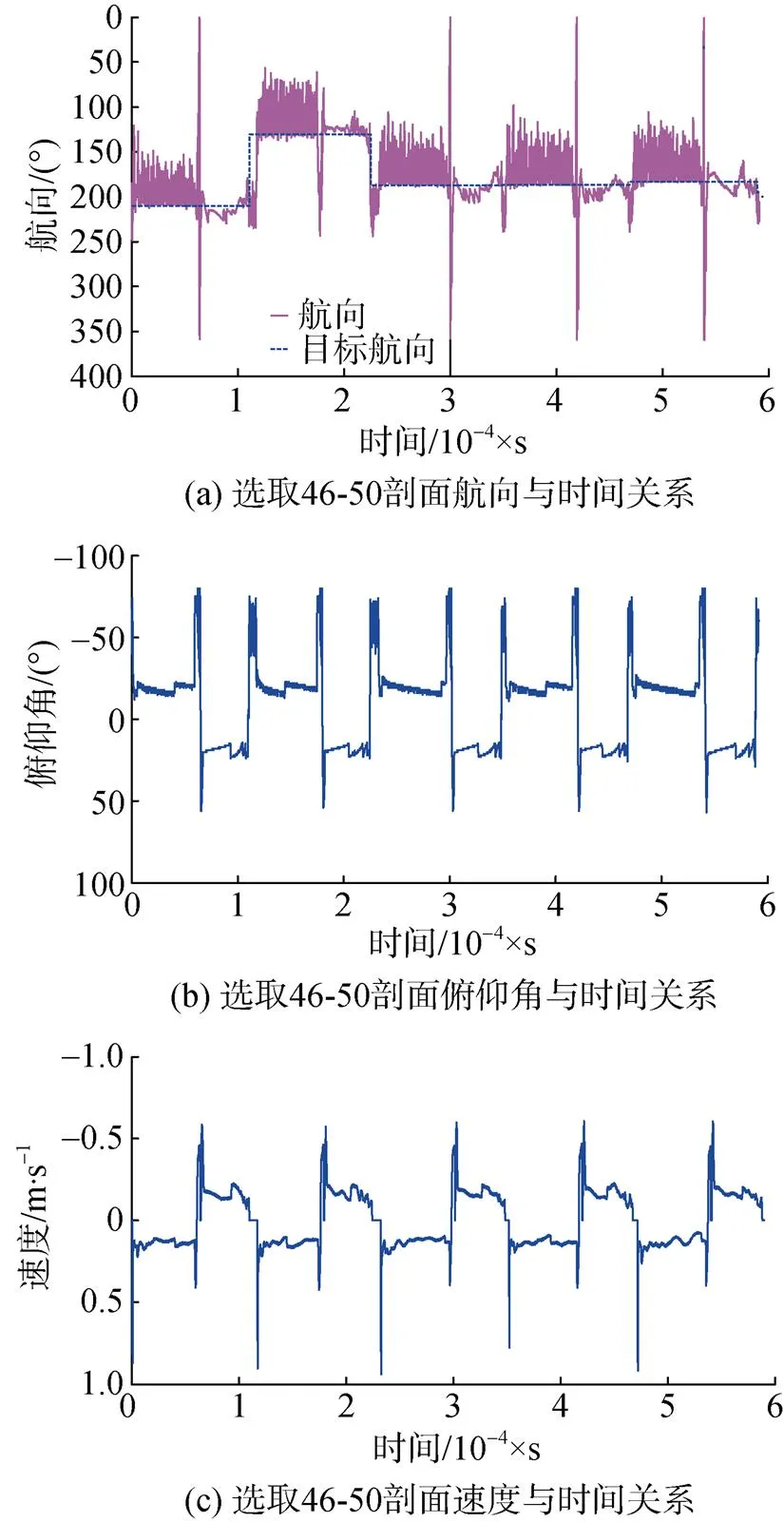
图9 声学观测型水下滑翔机第46~50剖面稳定性分析结果
该次海上试验通过机载的水听器采集到了声学观测型水下滑翔机的自噪声和海洋背景噪声。水下滑翔机自噪声的采集是通过水下滑翔机在滑翔过程中某一模块单独开启时, 提取对应时段的声学数据作为该模块产生的自噪声。声学观测型水下滑翔机的自噪声来源主要包括: 用于航向调节的航向电机动作、用于俯仰调节的俯仰电机动作、用于排油的初级泵和高级泵动作4个部分。通过选取第50个剖面中各个动作对应的声学数据分析各动作的频谱图, 同时选取该剖面对应深度无以上4部分动作时海洋背景场噪声作对比, 水听器采样频率为81 kHz, 如图10所示。
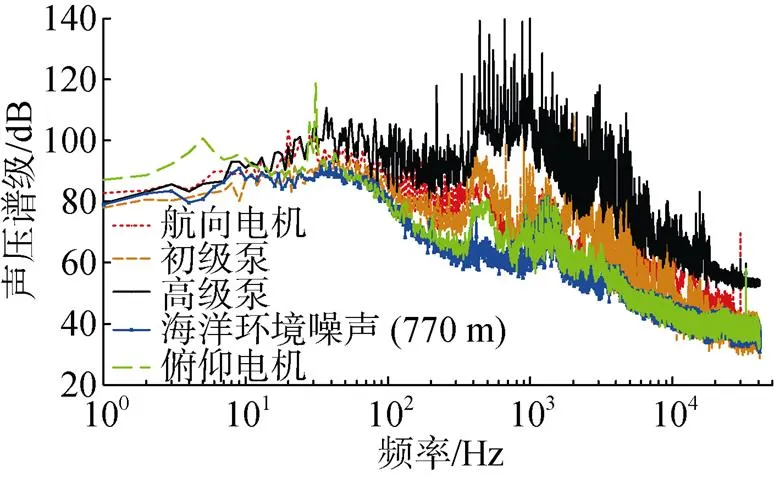
图10 声学观测型水下滑翔机自噪声分析结果
图10表明, 排油动作对声学观测型水下滑翔机的自噪声贡献最大, 尤其是高级泵开启时; 同时也可看出, 高级泵噪声是1个宽频信号与线谱的组合, 该部分噪声较大, 对背景声场的采集具有较大影响, 所以在水下滑翔机开启排油时, 建议关闭水听器采集海洋环境噪声。而当航向电机动作产生的噪声大于100 Hz频率时, 自噪声大于背景噪声, 但相对排油动作较小, 可以通过减少航向电机的动作频率来降低该自噪声的影响。此外, 当俯仰电机动作产生的噪声在400~500 Hz时, 水下滑翔机自噪声高于背景噪声, 其他频段与背景噪声相当, 所以俯仰电机调节动作对自噪声贡献最小。
图11为水下滑翔机第50个剖面下潜阶段不同深度的海洋环境噪声。在对应的深度, 水下滑翔机没有任何动作时提取对应时间的声学信号作为对应深度的海洋环境噪声, 从图中可知: 在500 Hz左右和1 050 Hz存在异常, 该异常值有可能是流噪声或者是水下滑翔机上搭载的水下滑翔机专用温盐深测量仪(glider payload con- ductivity temperature-deph, GPCTD)传感器在采集过程中产生。其他频段都和海洋背景声场能量级相同。通过不同深度的海洋环境噪声对比可以发现: 随着深度的增加, 噪声能量总体降低, 符合海洋环境噪声规律, 因此, 该声学观测型水下滑翔机具备海洋背景声场的观测能力。
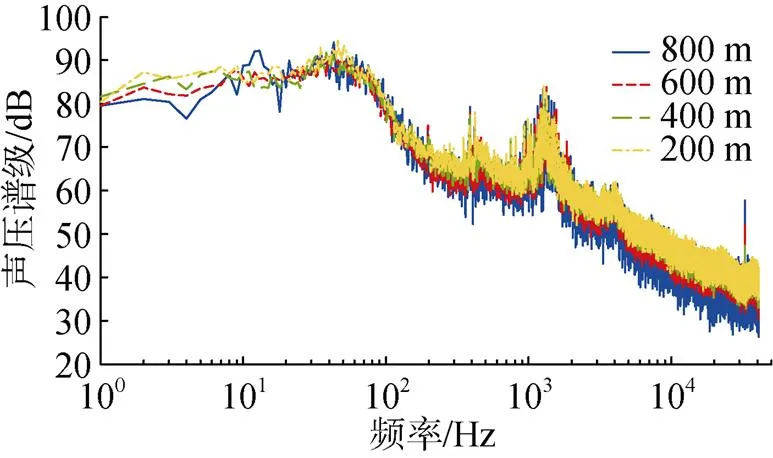
图11 不同深度海洋环境噪声
4 结束语
文中面向对海洋声学背景场进行长时序、大范围连续观测的需求, 设计了一款声学观测型水下滑翔机。基于水听器声学测量与水下滑翔机运动性能相互约束的关系, 利用商用CFD计算水动力的方法, 给出了水听器集成于水下滑翔机的最优布局。同时, 通过建立声学观测型水下滑翔机的动力学模型, 并基于该模型进行了运动仿真分析, 得到了水下滑翔机最优的滑翔控制参数。海试结果验证了该水下滑翔机运动性能的稳定性, 及其海洋背景声场测量的有效性, 并获取了大量的水下滑翔机平台自噪声和海洋背景声场声学数据, 为未来对声学观测型水下滑翔机进一步的减振降噪提供了原始数据。
[1] Liu L, Xiao L, Lan S Q, et al. Using Petrel II Glider to Analyze Underwater Noise Spectrogram in the South China Sea[J]. Acoustics Australia, 2018, 46(1): 151-158.
[2] 魏永星, 于金花, 常哲, 等.海洋环境噪声数据处理及时空特性研究[J]. 电子设计工程, 2014, 22(14): 28-30.
Wei Yong-xing, Yu Jin-hua, Chang Zhe, et al. Signal Processing and Temporal-spatial Characteristic Analysis of Ocean Ambient Noise Data[J]. Electronic Design Engineering, 2014, 22(14): 28-30.
[3] 沈新蕊, 王延辉, 杨绍琼, 等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报, 2018, 26(2): 89-106. Shen Xin-rui, Wang Yan-hui, Yang Shao-qiong, et al. Development of Underwater Gliders: An Overview and Prospect[J]. Journal of Unmanned Undersea Systems, 2018, 26 (2): 89-106.
[4] Alvarez A, Caffaz A, Caiti A, et al. Fòlaga: A Low-cost Autonomous Underwater Vehicle Combining Glider and AUV Capabilities[J]. Ocean Engineering, 2009, 36(1): 24- 38.
[5] Ferguson B G , Lo K W , Rodgers J D. Sensing the Unde- rwater Acoustic Environment with a Single Hydrophone Onboard an Undersea Glider[C]//IEEE Oceans 2010.Syd- neyAustralian:IEEE, 2010.
[6] Matsumoto H, Haxel J H, Dziak R P, et al. Mapping the Sound Field of an Erupting Submarine Volcano Using an Acoustic Glider[J]. Journal of the Acoustical Society of America, 2011, 129(3): 94-99.
[7] Pla P, Tricarico R. Towards a Low Cost Observing System Based on Low Logistic Sea Explorer Glider[C]//2015 IEEE Underwater Technology(UT). Chennai, India: IEEE, 2015: 1-3.
[8] 李天森. 鱼雷操纵性[M]. 第2版. 北京: 国防工业出版社, 2007.
[9] 刘方. 混合驱动水下滑翔机系统设计与运动行为研究 [D]. 天津: 天津大学, 2014.
[10] Graver J G, Leonard N E.Underwater Glider Dynamics and Control[C]//12th International Symposium on Unmanned Untethered Submersible Technology. Durham, NH: Autonomous Undersea Systems Institute, 2001: 1742-1710.
[11] 马伟, 王延辉, 徐田雨. 微结构湍流测量水下滑翔机设计与试验研究[J]. 机械工程学报, 2017, 53(9): 22-29. Ma Wei, Wang Yan-hui, Xu Tian-yu. Design and Sea Trials of the Underwater Glider for Micro-structure Turbulence Measurement[J]. Journal of Mechanical Engineering, 2017, 53(9): 22-29.
Research on Observation Technology of Oceanic Acoustic Background Field Based on Underwater Glider
YIN Yun-long,YANG Ming,YANG Shao-qiong,LIU Yu-hong, NIU Wen-dong
(1. School of Mechanical Engineering, Tianjin University, Tianjin 300350, China; 2. Qingdao Institute for Ocean Engineering, Tianjin University, Qingdao 266237, China; 3. The Joint Laboratory of Ocean Observing and Detection, Pilot National Laboratory for Marine Science and Technology(Qingdao), Qingdao 266237, China; 4. School of Mechanical Engineering, Tsinghua University, Beijing 100084, China)
Underwater glider can realize long-time and large-scale stable observation of oceanic ambient noise. This paper developed an acoustic observation underwater glider with the ability of oceanic ambient noise measurement through researching integrated application of hydrophone and underwater glider. Based on the working principle of hydrophone and the motion constraint of underwater glider, the computational fluid dynamics(CFD) software was used to calculate the hydrodynamic force for optimizing the installation position of hydrophone in underwater glider body. A dynamic model was further established for motion simulation and determination of the optimal motion parameters of the developed underwater glider. A large number of underwater glider self-noise and oceanic ambient noise data were obtained in the sea trial in the South China Sea in May 2019, and the motion stability of this underwater glider and its observation ability of oceanic acoustic background field were verified.
underwater glider; acoustic observation; oceanic ambient noise; self-noise; dynamic model
TJ630; U674.941; O427.5
A
2096-3920(2019)05-0555-07
10.11993/j.issn.2096-3920.2019.05.011
尹云龙, 杨明, 杨绍琼, 等. 基于水下滑翔机的海洋声学背景场观测技术[J]. 水下无人系统学报, 2019, 27(5): 555-561.
2019-08-01;
2019-08-21.
国家重点研发计划(2016YFC0301100, 2017YFC0305902)和深圳市投资控股有限公司资金; 国家自然科学基金(51722508, 11902219); 天津市自然科学基金(18JCQNJC05100, 18JCJQJC46400); 青岛海洋科学与技术国家实验室主任基金(QNLM201705)和“鳌山人才”培养计划(2017ASTCP-OS05, 2017ASTCP-OE01); 山东省支持青岛海洋科学与技术试点国家实验室重大科技专项(2018SDKJ0205).
*牛文栋(1988-), 男, 博士, 助理教授, 主要研究方向为水下航行器研制及其海上试验应用.
(责任编辑: 杨力军)
