基于滑移预测的月球车路径规划研究
2019-11-12周兰凤杨丽娜
周兰凤 杨丽娜 方 华
(上海应用技术大学 上海 201418)
0 引 言
月球车作为探测月球的主要工具之一,它最重要的任务就是月球路径规划[1]。月球环境复杂多样使月球车路径规划十分困难,有效地避免陷入危险地形、缩短最优路径长度和节约路径规划时间是月球路径规划研究的重点。月球地形的湿度和坡度的不同,产生的滑移率不同,一定程度使路径规划产生偏移,有效的预测滑移有利于找到最短最优路径。既包含传统的算法(A*算法[2],遗传算法[3]),也带有一些新型的智能算法(蚁群算法[4],神经网络算法[5],粒子群算法[6]),经典遗传算法存在搜索时间长、易陷入僵局、算法复杂度高的不足,无法求得最优化路径。
本文针对现有的遗传算法容易陷入局部最优解的问题,综合考虑月球地形环境信息,通过加入地形因素的滑移预测综合通过性代价函数。使用MATLAB仿真实验,保持地形参数不变,调整滑移通过性函数参数,对比100次实验仿真结果,综合遗传算法进化代数少于传统遗传算法。改进后的遗传算法提高了月球车路径规划的平滑性,缩短了路径的长度,节省了路径规划的时间和进化次数。
1 综合遗传算法
1.1 遗传算法路径规划模型建立
本文遗传编码采用实数编码,遗传算法中每1个染色体对应1个解决方案,在路径规划过程中,基因是由起点、终点和路径规划经过的若干中间点组成。如图1所示,起点(X1,Y1,Z1)、终点(Xn,Yn,Zn)和n-2个中间点构成1条携带从起点到目标点的路径规划信息的染色体。

图1 路径规划中有n个基因的1条染色体
因此,一条完整的机器人路径(P)就可以表示为若干条线段的有序组合,如下式所示:
P=∑Pi
(1)
式中:Pi表示第i段直线段的矢量表示。
1.2 初始种群的生成
本文中一条染色体由n个坐标点组成,即一条可通过性的路径,也称这个路径为一条染色体。从起点出发,随机选择可通过性的邻节点,取其坐标加入染色体中,依次循环,直到找到终点结束。重复上面操作,达到初始目标种群数量,终止循环。
1.3 遗传操作
遗传算法是一种仿生的全局优化概率搜索的自适应算法[7]。其算法结构设计需要预设的参数有:初始种群数量、最大进化迭代数、交叉概率和变异概率等。 算法过程包括选择、交叉、变异三个阶段。将遗传算法应用到路径规划规程的问题中,固定参数的交叉概率和变异概率适应算法可以更好地找到最优路径[8],通过不断的迭代,最终得到问题最优解。
本算法采用优胜劣汰选择策略,即用部分优秀个体,根据一定策略实时替换部分低劣个体[9],保持个体的最优化。
(1) 交叉操作是遗传学中基因重组的重要过程,也是遗传算法产生新个体的重要途径[10]。本文采用部分映射方式进行染色体的交叉操作,生成两个随机数m、n,将x、y染色体位于m和n之间的基因片段互换。交叉概率公式为:
(2)
式中:Pc表示动态路径规划中交叉概率;Pcmax表示交叉概率的最大值;Pcmin表示交叉概率的最小值;Fmax表示最大适应度值;Fmin表示最小适应度值;Fc表示两个要交叉个体中较大的适应度值。
(2) 变异操作类似遗传学中的基因突变,更新过程中一条染色体上的点坐标发生随机变化,即产生变异个体。变异概率公式为:
(3)
式中:Pm表示动态路径规划中变异概率;Pmmax表示变异率的最大值;Pmmin表示变异概率的最小值;Fmax表示最大适应度值;Fmin表示最小适应度值;Fm表示要变异个体的适应度值。
2 适应度函数设计
适应度函数作为评判种群中个体的存活率的标准之一,依据目标函数而确定,路径规划过程中,适应度函数的值越大越好。在本文路径规划中路径最短和进化代数最小是首要目标。除此之外,本文还加入了地形评估综合通过性代价函数。地形评估综合通过性代价函数是综合了地形的一些主要因素,如阶梯障碍、地形粗糙程度、坡度等,同时还加入了最主要的滑移因素,从而在滑移预测的基础上形成了地形评估综合通过性代价函数。该函数可以准确描述地形上两点之间的综合通过能力。这里将上述地形评估综合通过性代价函数f(p,n),并入遗传算法的适应度函数,采用综合遗传算法进行路径规划。
设置节点p到节点n的基因片段的地形综合代价函数如下:
f(p,n)=f1×ftrav(p,n)+f2×frisky(p,n)+
f3×fguide(p,n)+f4×fsmooth(p,n)
(4)
式中:ftrav(p,n)为从节点p到节点n的可通过性代价函数(一般取值为0或1);frisky(p,n)为潜在危险性代价函数;fguide(p,n)为综合考虑了地形的角度和坡度等因素的指导性路径代价函数,它与地形的坡度角度有关;fsmooth(p,n)是描述路径平滑程度的代价函数,取值为固定常数值f1、f2、f3、f4分别为ftrav(p,n)、frisky(p,n)、fguide(p,n)和fsmooth(p,n)的权值,一般将它们取为同一固定的常数值。
综上,在滑移预测的基础上形成了地形评估综合通过性代价函数f(p,n),将它与遗传算法融合,改变其适应度函数,构造成一个具有滑移预测地形评估综合通过性代价的适应度函数f′(p,n),本文称为综合适应度函数,公式如下:
f′(p,n)=f(p,n)+f0(p,n)
(5)
式中:f′(p,n)为综合遗传算法的函数的适应度函数;f(p,n)地形综合代价函数;f0(p,n)基于遗传算法适应度函数。
3 仿真实验
基于MATLAB 2014环境下建立虚拟三维地形环境,虚拟三维空间抽象为网格或栅格,然后设置参数,如路径中的起点、终点、高度以及初始种群的数量。本次实验设置种群个数30,最大进化迭代次数200。从图2可以看出,该三维遗传算法路径规划,比二维的栅格模型更直观有效。
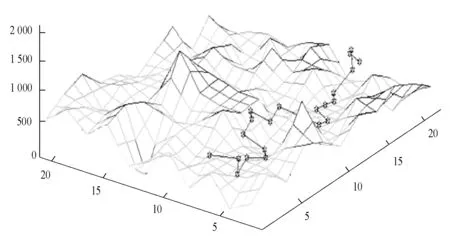
图2 基于遗传算法的三维模型路径规划图
3.1 遗传算法与综合遗传算法实验对比
本文遗传算法和综合遗传算法(简称IGA)一次进化代数及综合适应度变化图如图3、图4所示。从图3可以看出,基本遗传算法进化到10代左右就进入了局部最优解,50代之后更新最优解,140代得到1次实验最优解,综合适应度值为130。从图4可以看出,进化代数20次时得到1次试验最优解,综合适应度值为125,一定程度上缩短了路径规划时间,提高了工作效率。
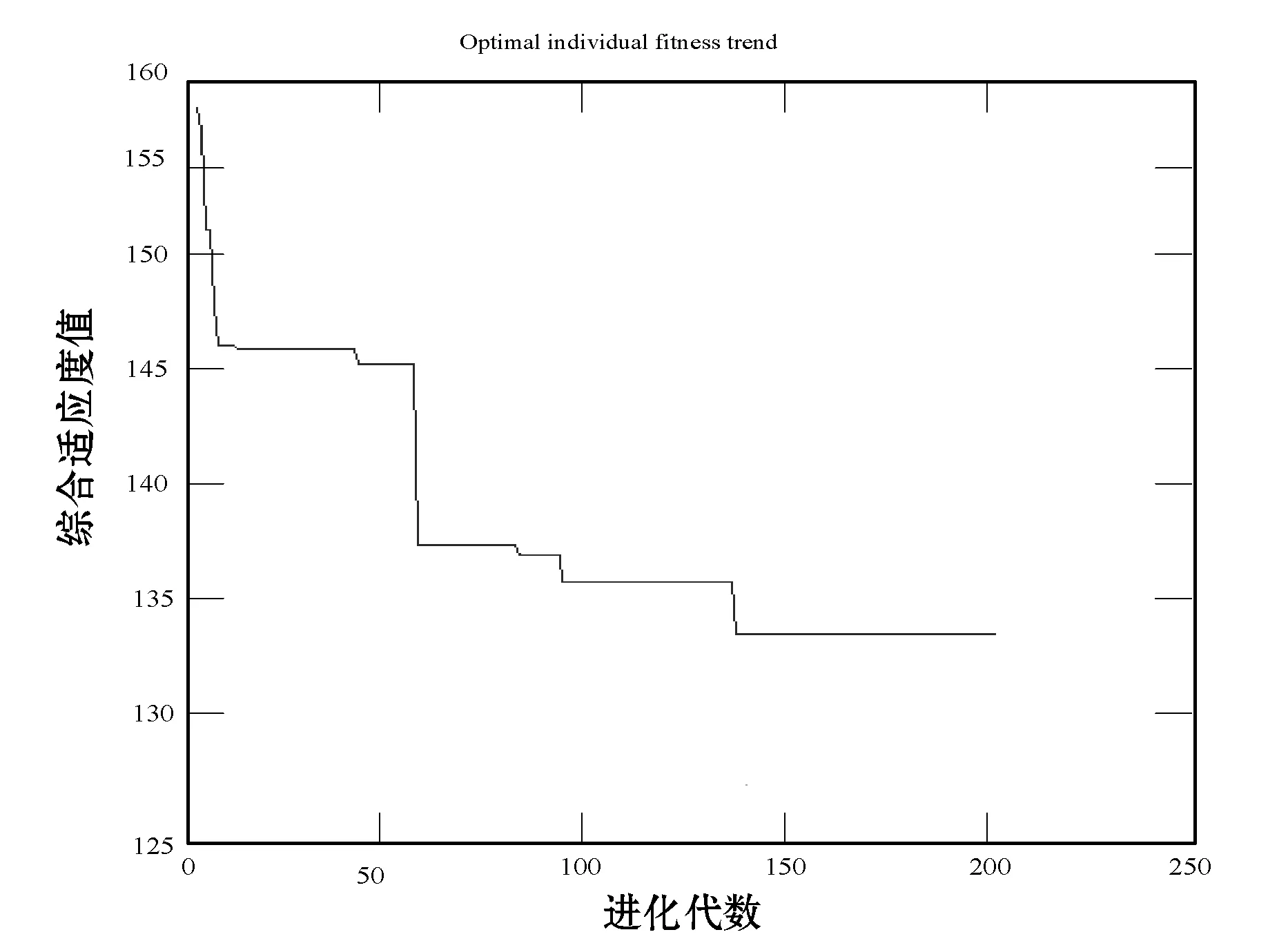
图3 遗传算法
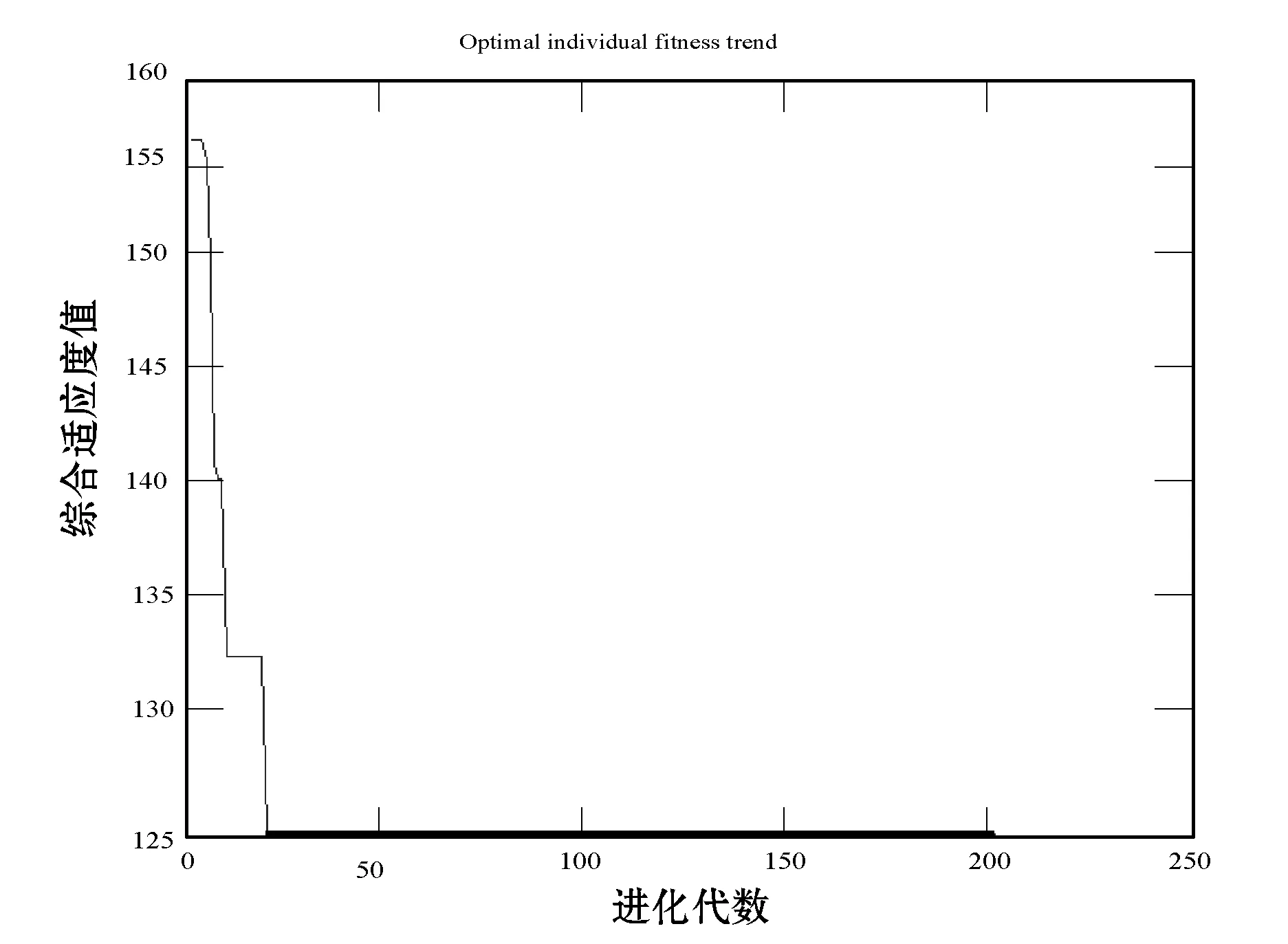
图4 综合遗传算法
为了进一步证明算法的合理性,规避偶然因素对算法的影响,对两种路径规划算法分别实验100次,统计实验结果如表1所示。可以看出,综合遗传算法的平均最大路径比遗传算法最大路径缩短了34.7%、平均适应度值提高了12.4%、平均进化代数缩小了49.2%。
3.2 改进蚁群算法与综合遗传算法对比
通过设置相同参数的滑移预测函数和地形通过性代价函数,使用改进蚁群算法和综合遗传算法各实验n次,各随机抽取两种算法的6次试验进行对比,结果如表2所示。
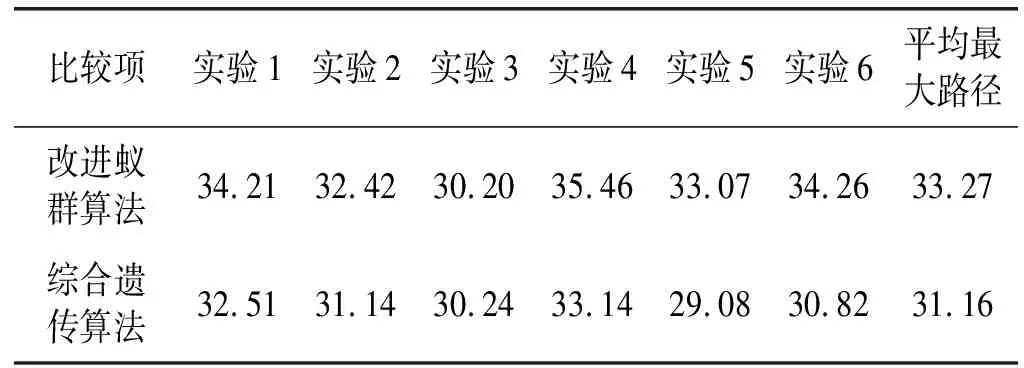
表2 两种算法的最大路径长度比较 km
可以看出,综合遗传算法比改进蚁群算法在最大路径长度性能更加优化。
综合两个实验得知,通过引入带有滑移预测函数可通过性的代价函数,使得算法在寻找路径的过程中,更加注重路径的曲折性且避免机器人搜索产生无效的移动距离。由表1可以看出,综合遗传算法在找到最优的路径的时间效率上也得到了一定的改善。因为在考虑了滑移预测的地形可通过性函数的基础上,综合遗传算法路径规划的搜索能力更加优化,不会在一些不合理的路径上继续进行后续的搜索。
4 结 语
由于遗传算法应用在路径规划问题上,存在诸多问题,如收敛效率低、陷入局部最优解、复杂度高等,引入了地形综合代价函数进行适应度函数设计,根据综合适应度值动态获得交叉算子和变异算子值,提出了一种综合遗传算法路径规划算法。通过实验仿真得知, 改进的综合遗传算法在搜索最优路径、时间复杂度上比传统遗传算法都有了更好的优化。这也说明本文在算法上的创新应用,在某种程度上弥补了传统遗传算法的缺点。加入可通过性滑移预测算法的遗传算法,为月球车避障提供有效方法,一定程度上提高了路径搜索的效率、节约了时间成本、规避了地形风险。
