单系统伪距单点定位在不同地区的精度分析
2019-11-12徐宁辉陆杰梁月吉
徐宁辉,陆杰,梁月吉
(1.南宁勘察测绘地理信息院,广西 南宁 530001;2.桂林理工大学 测绘地理信息学院,广西 桂林 541004)
0 引 言
从GPS投入使用到如今,各国也相继研发同类型系统,现在主要有GPS、GLONASS、北斗卫星导航系统(BDS)和Galileo四大卫星导航定位系统[1].为了探讨单系统在全球不同地区的定位精度,许多学者对此进行了研究.如曾琪等根据MGEX站及亚太地区若干测站的观测数据,比较了GPS和BDS在全球范围内的定位精度,得出BDS在亚太中低纬度地区定位精度优于GPS的结论[2];杜玉军等根据实测数据,对比GPS和BDS在不同纬度的定位精度,得出BDS定位总体质量与GPS相当的结论[3];赵存洁等根据泰国实测数据,分析比较了GPS、GLONASS和BDS及三者间的组合系统在亚太低纬度地区的定位精度,得出了GPS和BDS优于GLONASS、组合系统一定程度上可以提高定位精度的结论[4];罗小敏等利用MGEX站的数据进行了Galileo伪距单点定位解算,结果表明Galileo单点定位性能总体上低于GPS[5];崔立鲁等利用实测数据分别对BDS、GPS和BDS+GPS三种定位模式下单点定位性能进行分析研究.结果表明,BDS+GPS双系统定位模式相对于BDS或GPS单系统定位精度更高,稳定性更好[6].可见,对Galileo在全球范围内定位精度的研究较少涉及,对各单系统在全球范围内定位精度的对比分析还需进一步探讨.基于上述研究,本文利用Matlab建立各单系统的伪距单点定位模型,根据MGEX提供的不同地区的实测数据,分析比较了GPS、GLONASS、BDS和Galileo在全球不同地区的定位结果.
1 定位模型
伪距单点定位的观测方程为[7]
ρ=p+c·dt-cdT+Vtrop+Vion+ε,
(1)
式中:ρ为单系统的伪距观测值;p为卫星到接收机之间的几何距离;c为光的传播速度;dt为接收机钟差;dT为卫星钟差;Vtrop为对流层延迟误差;Vion为电离层延迟误差;ε为伪距多路径误差及观测噪声.
合理选取随机模型是GNSS高精度定位的关键,常用的方法包括:等权方法、信噪比确权方法、卫星截止高度角确权方法和验后方差估计确权方法等[8-10].然而,等权模型数据处理较为简单,不考虑各观测值对解算的影响,将各观测值同等精度解算,往往易将复杂的数据误差简单化,不符合实际;信噪比模型计算较为复杂,模型参数较多,由于部分接收机无法输出信噪比参数数据,使得模型的推广具有一定的局限性;基于验后方差估计的方法虽然可以根据不同观测精度的数据合理分配权值,通过循环迭代的方法对观测值方差进行调整,但是模型运行需要时间较长,且该方法需要有足够的观测历元数,对于Galileo不太适合使用.由于信号在传播过程受到的误差影响与卫星高度角存在一定的关系,卫星高度角过低,往往受电离层、对流层和多路径效应的影响较大;反之,卫星信号受到大气层延迟和多路径效应的影响减小.因此,本文采用更符合实际情况的卫星截止高度角模型进行计算[10]:
σ2=a2+b2/(sinE)2.
(2)
一般而言,a、b根据文献[9-10]确定,可取a=0.4 m,b=0.3 m.
伪距单点定位就是通过广播星历计算卫星的三维位置,采用迭代方法计算接收机的位置坐标以及接收机钟差,解算流程如图1所示.
GPS、GLONASS、BDS或Galileo伪距单点定位的详细解算过程可参考文献[7],本文不再重述.
2 实验分析
为探讨分析不同单系统伪距单点定位的效果,选取来自于全球MGEX(http://mgex.igs.org/index.php)[11]的6个测站在2013年第148天的监测数据进行实验,使用Matlab编程的定位模型进行定位解算.本文所采用的MGEX各测站信息如表1所示,地理位置如图2所示.

表1 各测站接收机基本信息
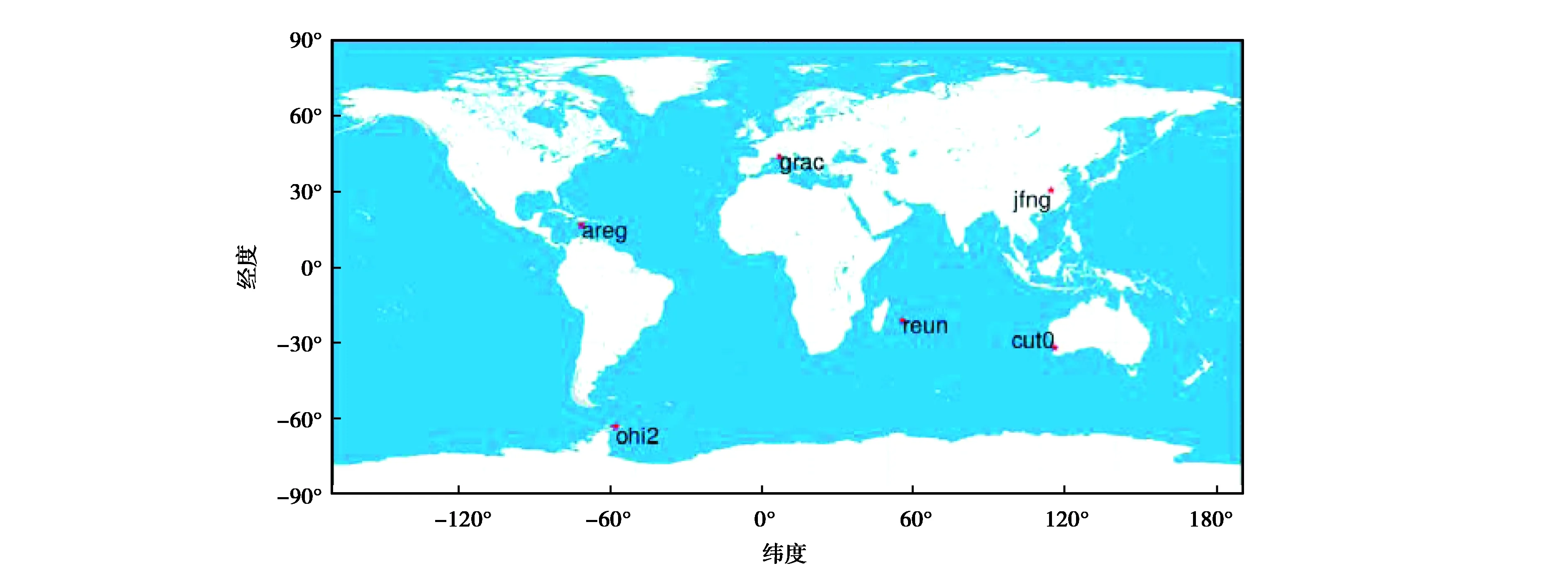
图2 各测站地理位置分布
伪距单点定位数据主要采用MGEX跟踪站提供的GNSS观测数据,MGEX提供的码伪距观测值有多种: GPS有C1C、C2W和C2X、C5X三种伪距观测值,GLONASS主要有C1C和C1P、C2C和C2P两种伪距观测值,BDS有C1I、C7I和C6I三种伪距观测值,Galileo有C1X、C5X、C7X和C8X四种伪距观测值.本文实验方案设计如表2所示.
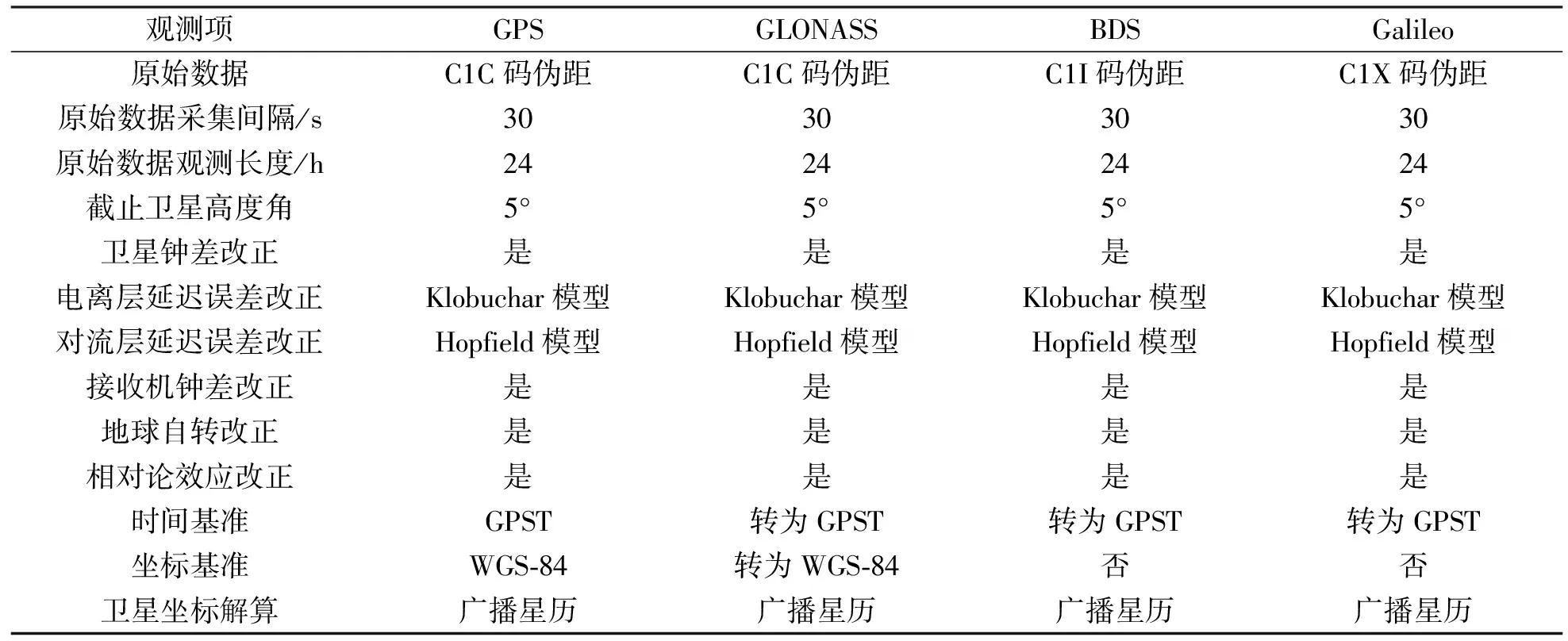
表2 实验方案设计
2.1 卫星可见性和PDOP分析
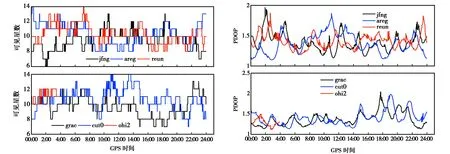
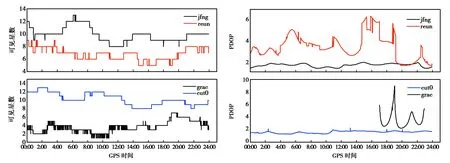
图3示出了四个单系统GPS、GLONASS、BDS和Galileo在不同测站的可见卫星数和PDOP值.
(a)GPS的可见卫星数和PDOP

(b)GLONASS的可见卫星数和PDOP
(c)BDS的可见卫星数和PDOP

(d)Galileo的可见卫星数和PDOP
由图3可知,对于不同区域的测站,GPS卫星可见数均在6~14颗之间,PDOP变化范围为1~2之间,多数小于1.5;GLONASS卫星可见数在6~12颗之间变化,PDOP变化范围为1~4,部分测站变化不平稳,如jfng和reun测站.而BDS具有一定的区域性,来自于中国的jfng测站和澳大利亚的cut0测站最少达到8颗,PDOP小于2,远优于来自于欧洲等区域的测站.对于Galileo,由于目前可运行的伽利略卫星只有四颗,从图3(d)可看出卫星可见数不多,能达到定位解算的时间段也较短,PDOP均比较大.结合表3可知,来自不同区域的6个测站,GPS平均可见卫星均大于9颗,GLONASS大于7颗,BDS在亚洲地区也达到10颗,而Galileo体现出了局限性的卫星分布.综上,GPS和GLONASS的定位可全球性,可见星和PDOP均比较稳定; BDS和Galileo卫星分布, 受区域性影响,PDOP不稳定.对于来自南极洲的ohi2测站,由于受极地气候等因素影响,GPS和GLONASS的可见星出现的时间为00:00~4:00,而BDS和Galileo基本没有可见星.
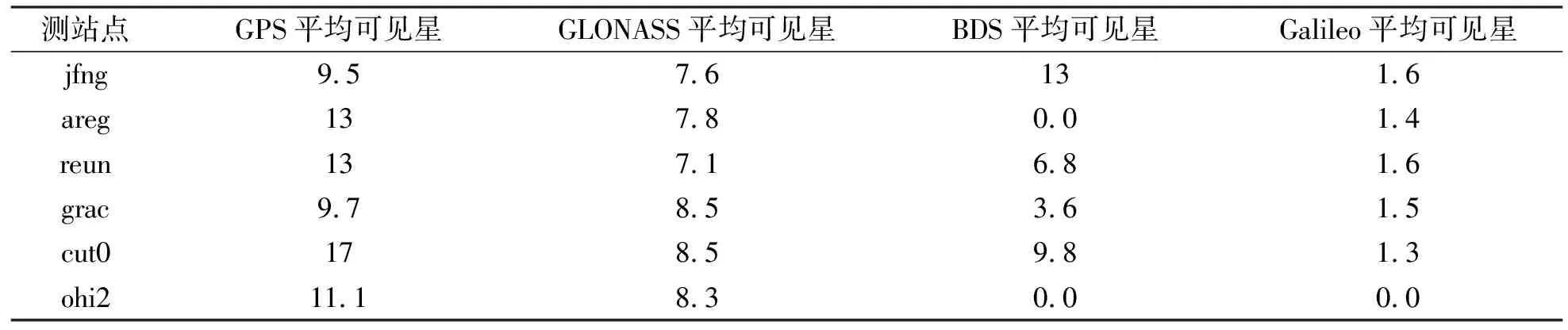
表3 各测站平均可见卫星数
2.2 定位精度分析
图4~7分别示出了GPS、GLONASS、BDS和Galileo四种单系统伪距单点定位的外符合残差变化值.

(a)GPS不同测站定位结果 (b)GLONASS不同测站定位结果
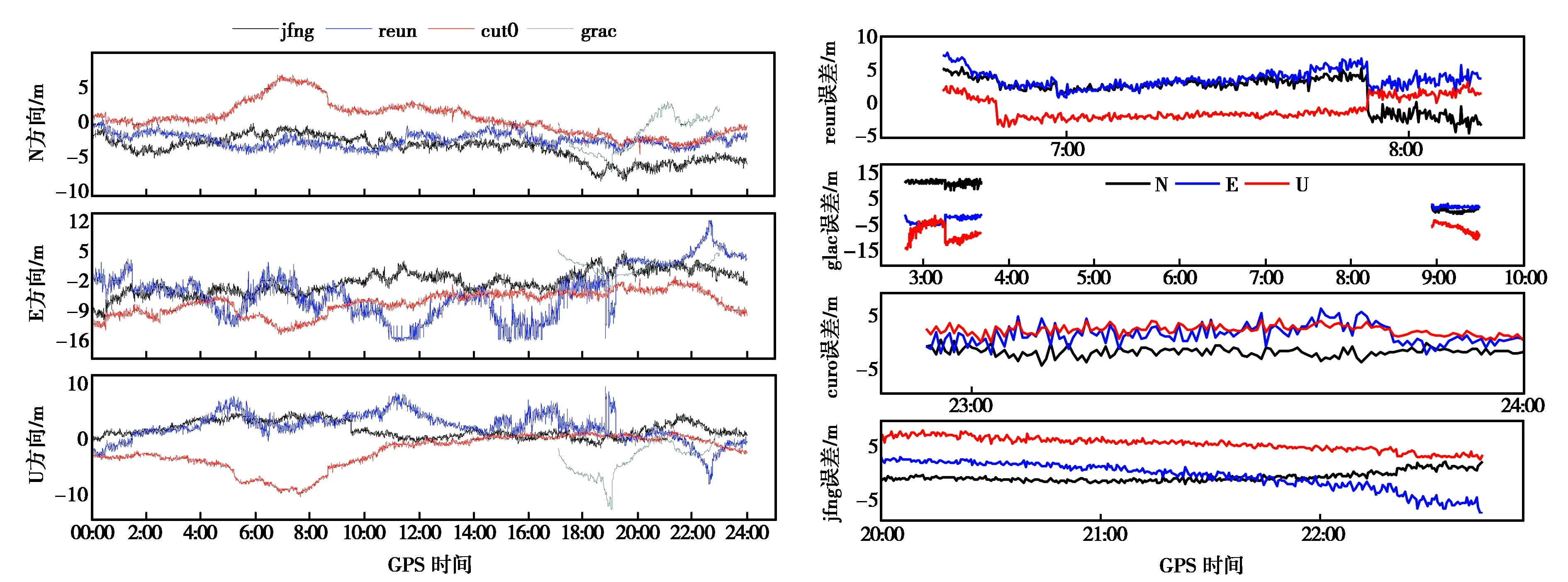
(c)BDS不同测站定位结果 (d)Galileo不同测站定位结果
由图4(a)~(d)可见,GPS的定位结果较为稳定,GPS在N、E和U方向上的残差多数在-5~5 m之间变化,GLONASS的 N、E和U的残差均在-15~15 m之间变化.从BDS的定位残差图不难发现,BDS在亚洲区域的定位结果远优于其他区域的定位结果,残差变化也比较平缓,而在来自于欧洲测站grac的有效定位时间段较短,定位结果极不稳定.由于Galileo可见星不多,定位结果具有一定的局限性.然而,对于出现可解历元较长的时段,Galileo在三个方向上的定位结果都比较稳定,伪距单点定位精度也可达到5 m,部分时段的定位精度优于GLONASS和BDS.从表4~7进一步分析各测站定位结果可知,GPS伪距单点定位内符合和外符合精度均优于GLONASS,GPS在N、E和U方向的内符合精度最大分别为2.382 m、3.572 m和4.643 m,外符合精度最大仅为2.418 m、3.580 m和5.722 m.而GLONASS定位结果在三方向的内外符合精度均超过4 m.对于BDS和Galileo,由于受到可见星的局限性影响,部分测站无法定位解算.对比jfng测站,BDS和Galileo的定位精度优于GPS和GLONASS,而Galileo内符合精度略优于BDS,BDS在N、E和U方向的内符合精度均小于3 m,外符合精度均小于4 m.对于grac测站,由于Galileo有效星数出现的时段较短,使得定位结果误差比较大.综上,GPS由于实现了全球覆盖能力,不同区域的定位结果均较为稳定;GLONASS的定位结果较差,这主要还是受到码伪距观测精度的影响;BDS在亚太地区可实现持续性的定位,在中国区域的定位精度较为稳定;Galileo在有效卫星持续较长的时段,也能达到比较好的定位精度.
表4 GPS定位精度m
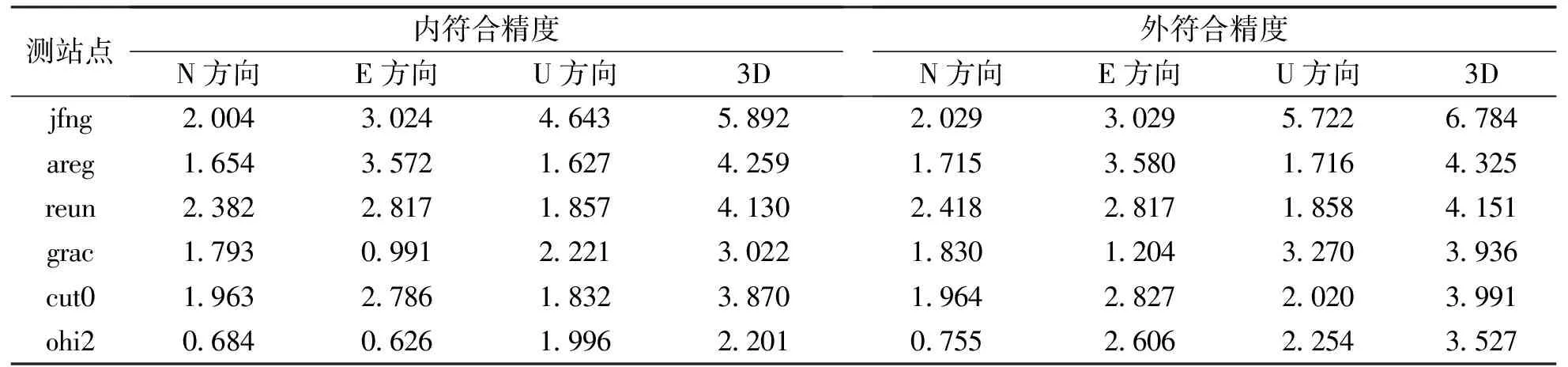
测站点内符合精度N方向E方向U方向3D外符合精度N方向E方向U方向3D jfng2.0043.0244.6435.8922.0293.0295.7226.784 areg1.6543.5721.6274.2591.7153.5801.7164.325 reun2.3822.8171.8574.1302.4182.8171.8584.151 grac1.7930.9912.2213.0221.8301.2043.2703.936 cut01.9632.7861.8323.8701.9642.8272.0203.991 ohi20.6840.6261.9962.2010.7552.6062.2543.527
表5 GLONASS定位精度m
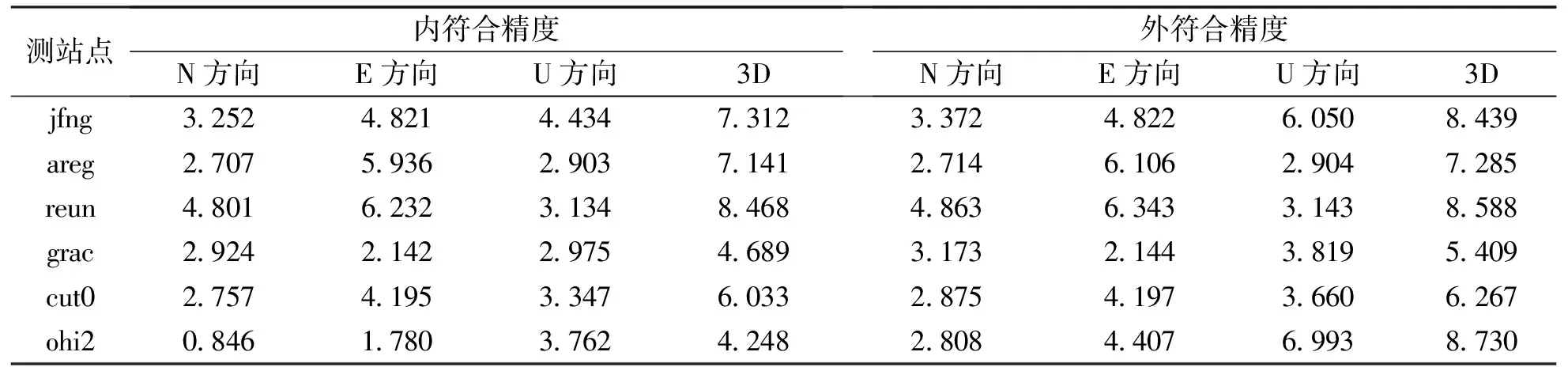
测站点内符合精度N方向E方向U方向3D外符合精度N方向E方向U方向3D jfng3.2524.8214.4347.3123.3724.8226.0508.439 areg2.7075.9362.9037.1412.7146.1062.9047.285 reun4.8016.2323.1348.4684.8636.3433.1438.588 grac2.9242.1422.9754.6893.1732.1443.8195.409 cut02.7574.1953.3476.0332.8754.1973.6606.267 ohi20.8461.7803.7624.2482.8084.4076.9938.730
表6 BDS定位精度m
表7 Galileo定位精度m
3 结 论
本文针对各系统特点,建立了相应的伪距单点定位模型,经理论分析和6个不同区域的测站数据表明:可见星数和PDOP方面:GPS均在1~2区间变化,多数小于1.5;GLONASS的PDOP变化区间为1~4,部分测站变化不平稳,如jfng和reun测站;BDS体现出一定的区域性,来自于亚太地区的PDOP均小于2,其他区域不稳定;由于Galileo可用星较少,且有效卫星数出现的时间较短,PDOP值均较大.GPS和GLONASS平均可见卫星均大于7颗;BDS集中分布于亚太地区,平均卫星达到9颗以上.从ohi2南极测站一天的数据显示,GPS和GLONASS的可见星也出现时段性,BDS和Galileo没有可用星.定位结果方面:GPS在N、E和U方向上的残差基本在-5~5 m之间变化;GLONASS的 N、E和U方向上的残差变化为-15~15 m;BDS在亚洲区域的定位结果远优于其他区域,残差变化较平缓.Galileo受时段长度的限制,对于较长的有效时段,Galileo在三个方向上的定位结果稳定,单点定位精度也可达到5 m.
