高速摄影技术分析射流式鱼泵流量对鱼运动规律影响
2019-11-11徐茂森牟介刚谷云庆周佩剑吴登昊
徐茂森,黄 斌,牟介刚,谷云庆,周佩剑,吴登昊
高速摄影技术分析射流式鱼泵流量对鱼运动规律影响
徐茂森1,黄 斌1,牟介刚2,谷云庆2,周佩剑2,吴登昊2※
(1. 浙江工业大学机械工程学院,杭州 310023;2.中国计量大学计量测试工程学院,杭州 310018)
采用高速摄影技术初步研究了草鱼、团头鲂和鲫鱼等3种鱼类在射流式鱼泵内的运动规律,分析了鱼类逆流游动率、逆流游动过泵时间、姿态变化率及鱼类与泵壁面碰撞所受力与工作流体流量之间的关系。试验研究表明:在5种工作流体流量工况下,随着工作流体流量的增加,鱼类逆流游动率逐渐降低,过泵时间逐渐减少,姿态变化率逐渐升高,所受碰撞力逐渐升高;在工作流体流量较低时,鱼类逆流游动率超过85%,过泵时间均超过300 ms,姿态变化率均小于6%,所受碰撞力在1~3 N的范围内;在工作流体流量较高时,鱼类逆流游动率在50%~85%之间,过泵时间在125~175 ms之间,大多数情况下姿态变化率9%~18%之间,所受碰撞力在5~7 N的范围内;在试验所用3种试验鱼中,草鱼的过泵时间最长,姿态变化率最高,并在大部分工况中所受碰撞力最大。
鱼;高速摄影技术;射流式鱼泵;工作流体流量;鱼类运动规律
0 引 言
中国是水产品生产和消费大国,水产养殖产量常年占据世界产量的60%以上[1]。随着养殖规模的扩大,中国水产养殖行业正朝着以深远海抗风浪网箱为代表的现代渔业技术发展[2]。因此,与其相配套的鱼泵已成为渔业机械的重要发展方向。鱼泵根据工作原理主要分为离心式鱼泵[3]、空气扬升式鱼泵[4]、真空式鱼泵[5]和射流式鱼泵[6]。其中,射流式鱼泵因其结构简单、流道宽阔和内部无运动部件等优点,非常适合输送鱼类,综合效益高。
输送性能和鱼类损伤是射流式鱼泵研究的重点,也是评估与生产实践是否具有应用价值的关键。在输送性能方面,以往的研究主要关注射流式鱼泵的输送能力和能耗[7],并比较了其在输送不同种类鱼时输送性能的差异[8]。在鱼类损伤方面,研究人员统计了不同工况下的鱼类损伤类型及程度,分析了相关血液指标的变化规律[9],并重点讨论了射流式鱼泵内复杂水力因素作用下的鱼类损伤[10]。射流式鱼泵工作状态直接关系到输送性能和鱼类损伤。然而,目前对射流式鱼泵内鱼类运动的研究仅停留在定性描述方面[11],缺乏定量分析与机理方面的讨论。
本文采用高速摄影技术研究了草鱼、团头鲂和鲫鱼在射流式鱼泵不同工况下的运动状态,统计并分析了泵内鱼类运动规律,分析了射流式鱼泵对输送性能及鱼类损伤的影响。研究结果将有助于射流式鱼泵的深入研究及结构优化设计,也为鱼类受迫运动研究提供参考。
1 材料与方法
1.1 试验材料
试验研究选取3种在身体形状上具有代表性的鱼类作为试验对象,分别为圆柱形的草鱼、侧扁形的团头鲂(又名“武昌鱼”)和纺锤形的鲫鱼作为试验对象。试验鱼购自湖北省团风县百容水产良种场,各尾试验鱼尺寸均匀,每种试验鱼各250尾,试验鱼身体参数如表1所示。
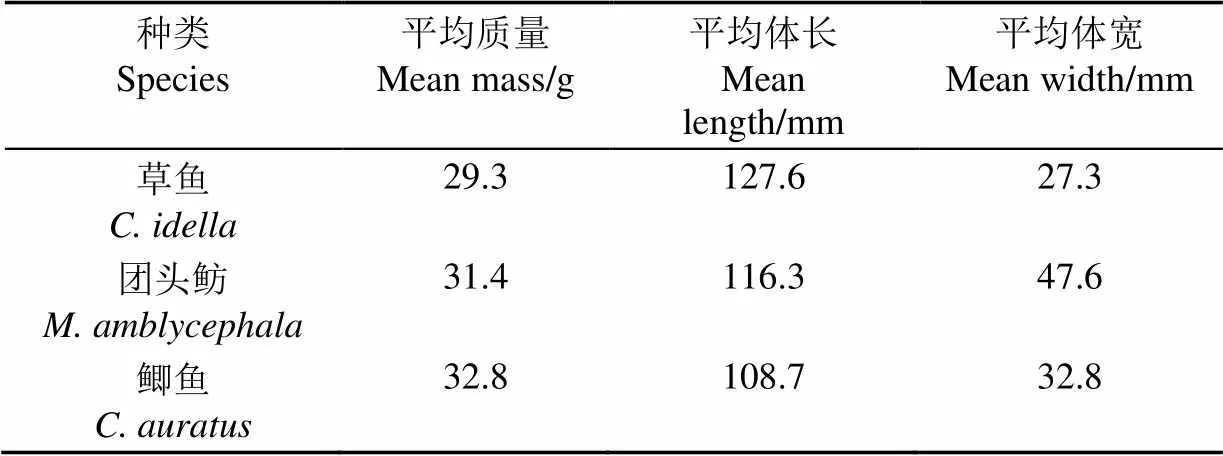
表1 试验鱼身体参数
1.2 试验装置
根据前期研究成果[12-13],本文设计了如图1所示的射流式鱼泵试验台。射流式鱼泵主要由被吸管、工作管、环形喷嘴、收缩室、喉管及扩散管等6个部分组成[14-18]。射流式鱼泵喉管与喷嘴截面积比为1.75,喉管直径为60 mm。工作原理:高压工作流体通过工作管后经环形喷嘴射出,在收缩室内形成高速射流,并对低压被吸流体(鱼水混合物)产生强烈的卷吸作用;鱼水混合物经被吸管与工作流体在收缩室和喉管内剧烈混流;之后,鱼水混合物经扩散管增压后排出。
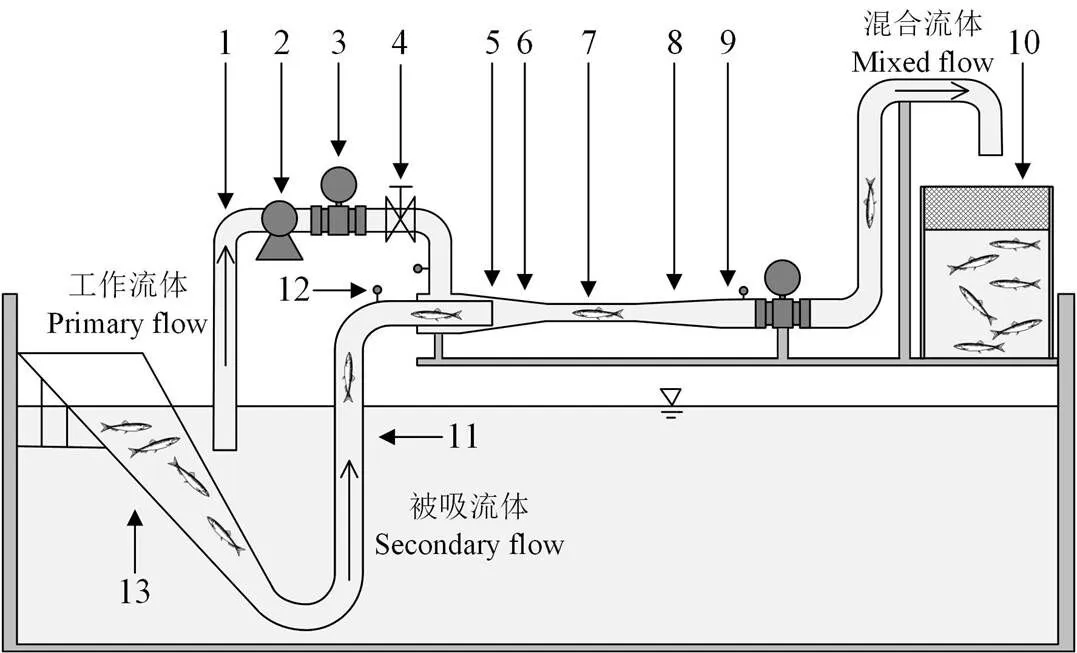
1.工作管 2.离心泵 3.电磁流量计 4.阀门 5.环形喷嘴 6.收缩室 7.喉管 8.扩散管 9.出口管 10.回收箱 11.被吸管 12.压力传感器 13.入口溜槽
为了观察泵内鱼类运动,该泵的收缩室、喉管和扩散管均由有机玻璃通过整体数控精加工而成,且上述部件外壁面均为方形以消除曲率的影响。泵出口直管段不安装阀门,试验鱼被输送至回收网箱。试验采用科隆(Krone)分体式电磁流量计测量流量,测量精度介于0.20%~0.30%。试验采用活图隆(Photron)一体式高速摄像机记录泵内鱼类运动状态,拍摄帧率10 000 fps,分辨率1 024×232像素。
1.3 试验方案
试验研究不同工作流体流量Q下射流式鱼泵内鱼类运动规律,设置了如表2所示的5个工况。每个工况分别采用50尾3种试验鱼进行试验(试验鱼不重复使用,每个工况共150尾)。试验首先开启电磁流量计和压力传感器等数据采集设备;然后,启动离心泵并调节至设定工况;待流动稳定后,布置好灯光,并完成高速摄像机对焦;之后,依次将试验鱼放入溜槽,并使用高速摄像机拍摄鱼类过泵过程;最后,从回收箱中回收试验鱼。
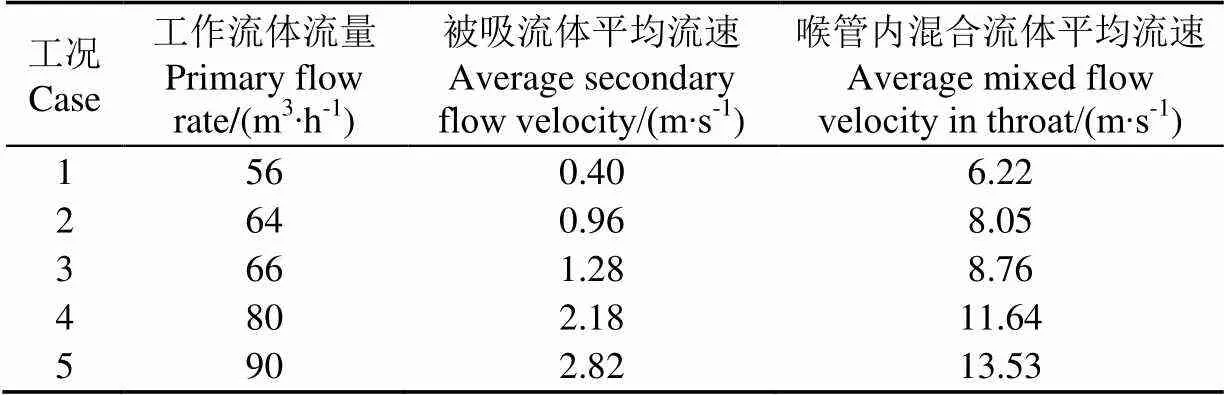
表2 试验工况
2 结果与分析
2.1 工作流体流量对鱼类运动规律的影响
根据射流式鱼泵内水流方向与鱼体相对位置,将泵内鱼类运动姿态分为顺流游动和逆流游动[11]。图2所示为不同工况下收缩室内鱼类逆流游动率(相同工况下,逆流游动鱼类占同种试验鱼总数的比例),由图可知所有工况中鱼类逆流游动率均超过50%,即逆流游动鱼类多于顺流游动的鱼类。在工作流体流量较低时、鱼类逆流游动率超过85%;在工作流体流量较高时,鱼类逆流游动率在50%~85%之间。这是由鱼类本能决定的,鱼类通过感应水流流速,能够主动对抗水流而逆流游动,并调整自身游动状态以保持逆流游动或悬停。随着Q的增加,鱼类逆流游动率逐渐下降。当Q较低时,被吸流体流速较低(如表1所示),与3种试验鱼的游动适应流速(约0.3~0.6 m/s)相当[19],在进入被吸管之前及在被吸管中时,鱼类有能力通过自身运动调整游泳姿态,转变为本能的逆流游动;当Q较高时,被吸流体流速较高,鱼类尚未及时调整姿态便被吸入射流式鱼泵。不同种的鱼类表现出不同的逆流游动率,在Q较低时团头鲂的逆流游动率较高,而在Q较高时草鱼的逆流游动率较高。团头鲂呈侧扁形,身体柔软,其在被吸管中更容易转变游动姿态,在Q较低时逆流游动率较高;而与其相比,草鱼游动极限流速较高,其在Q较高时具有更强的游泳能力,因此在Q较高时逆流游动率较高。
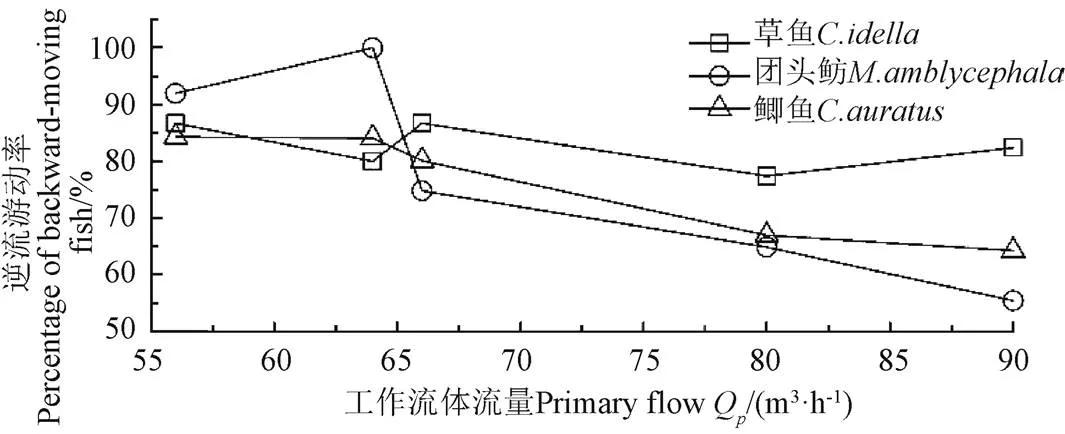
图2 不同工况下收缩室内鱼类逆流游动率
在相同工况下,与输送顺流游动的鱼类相比,射流式鱼泵输送逆流游动的鱼类往往需要更长时间。将鱼类进入收缩室至其离开扩散管的时间定义为鱼类过泵时间。经统计,不同工况下鱼类逆流游动平均过泵时间如图3所示。在工作流体流量较低时,时间均超过300 ms;在工作流体流量较高时,在125~175 ms。随着Q的增加,鱼类逆流游动平均过泵时间不断降低。其中,在Q较低工况中,该时间降幅明显;而在Q较高工况中,该时间变化幅度较小。在Q=56 m3/h工况中,草鱼、团头鲂和鲫鱼的逆流游动平均过泵时间分别达到了379.9、314.3和315.6 ms,均分别超过其在Q较高工况(Q=80和90 m3/h)的时间2倍以上。在Q较低的工况中,泵内水流流速也较低,泵内鱼类逆流游动效果明显,延长了其在泵内的停留时间,鱼类逆流游动平均过泵时间较长。而在Q较高的工况中,泵内水流流速较高,泵内鱼类逆流游动效果并不明显,故鱼类逆流游动平均过泵时间明显较短。对于试验中3种试验鱼,草鱼的逆流游动平均过泵时间均长于另外两种鱼的时间,尤其在Q=56 m3/h工况中。草鱼游动极限流速较高,故可以在射流式鱼泵内停留较长的时间。
从鱼类输送的角度,鱼类在泵内的停留时间与射流式鱼泵的鱼类输送性能密切相关。鱼类逆流游动比例越低,则射流式鱼泵的鱼类输送性能越强。鱼类在泵内的停留时间越短,则射流式鱼泵的鱼类输送性能越强。因此,在实际生产中,提高射流式鱼泵工作流体流量可以降低鱼类逆流游动率并显著地减少鱼类在射流式鱼泵内的停留时间,从而提高射流式鱼泵的鱼类输送性能。
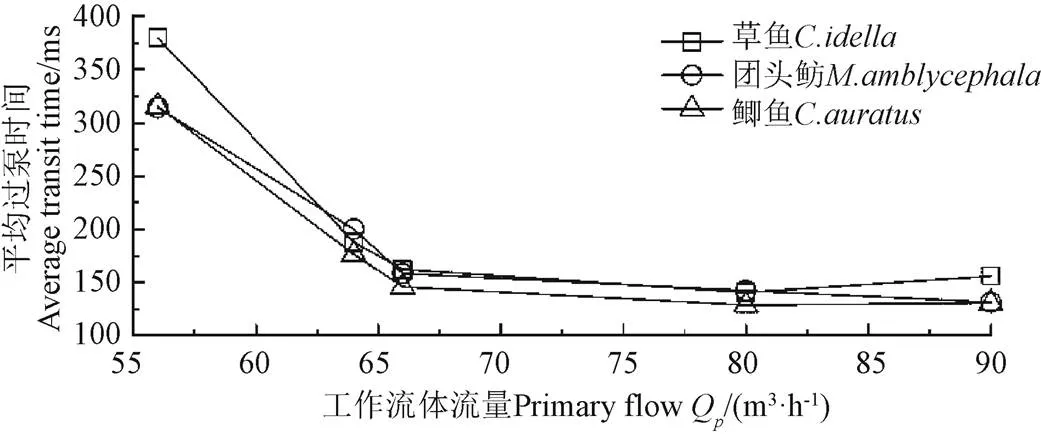
图3 不同工况下鱼类逆流游动平均过泵时间
鱼类在射流式鱼泵内并不都是一直保持着某种运动姿态而不发生变化的。鱼类在泵内受胁迫后产生应激响应,并出现自主游动现象,其与泵内复杂流动共同作用下在泵内出现2种姿态转变方式,即翻转和旋转,如图4。翻转最明显的特征为鱼体与水流方向的相对位置发生改变,其身体常呈现出C形运动;而旋转则不发生上述改变,仅以自身为轴旋转。试验发现鱼类姿态变化多发生于扩散管中前部,这是因为扩散管相较于喉管更宽阔,而扩散管中前部内流体的掺混过程相较于后部更为剧烈,有利于鱼类姿态变化。
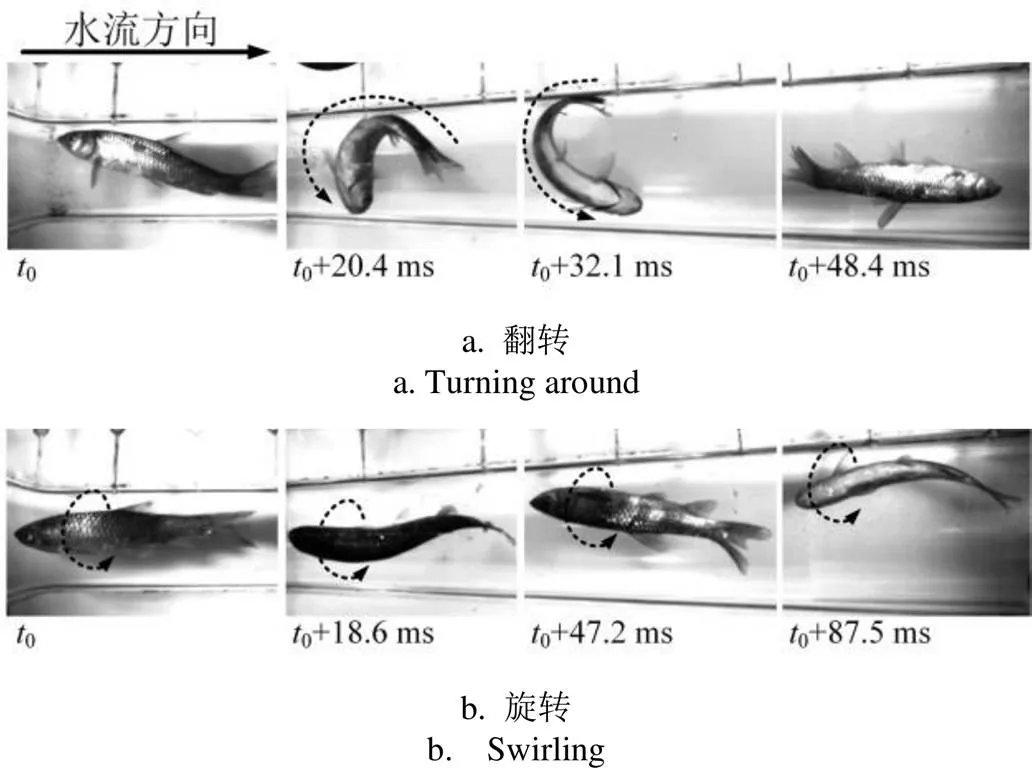
图4 射流式鱼泵内鱼类姿态转变方式
射流式鱼泵内鱼类姿态变化率(相同工况下,姿态变化鱼类占同种试验鱼总数的比例)如图5所示。在工作流体流量较低时,姿态变化率均小于6%;在工作流体流量较高时,大多数情况下姿态变化率9%~18%之间。从整体趋势上看,随着Q的增加,泵内鱼类姿态变化率也随之增加。在Q较低工况中,泵内流体流速较低,工作流体和被吸流体掺混程度较弱,鱼类可通过自身运动保持其在泵内的运动姿态,姿态变化率较低;而在Q较高工况中,泵内流体流速较高,工作流体和被吸流体掺混强烈,鱼类运动姿态在泵内复杂流动胁迫下被迫改变,姿态变化率较高。对于试验中的3种鱼类,其在泵内出现翻转的比例高于旋转的比例,则表明泵内轴向流动对鱼类姿态变化的作用要强于周向流动对其的作用。从图中亦可看出,泵内草鱼的姿态变化率明显高于另外两种鱼类,其圆柱形的体形在泵内更容易出现C形翻转和旋转。
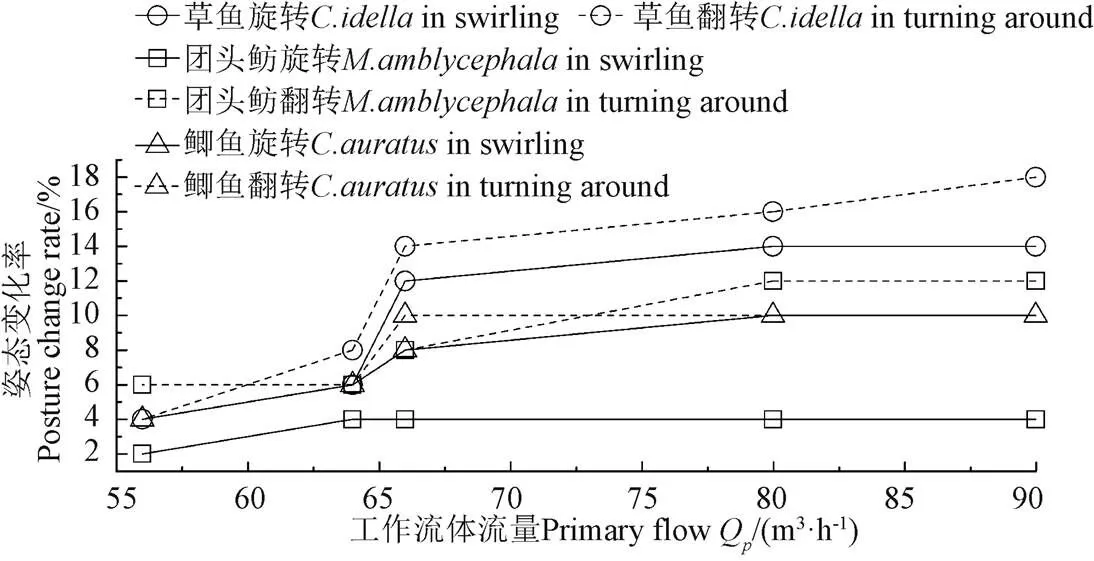
图5 射流式鱼泵内鱼类姿态变化率
在射流式鱼泵中,翻转常表现为鱼类由逆流游动转变为顺流游动。产生该现象的原因可能是大多数鱼类在进入收缩室之前已经保持了逆流游动的状态,如图2所示。与旋转相比,鱼类翻转可以有效地减少其在泵内的停留时间,如图4所示。
从鱼类输送的角度,鱼类逆流游动比例越低,则射流式鱼泵的鱼类输送性能越强。因此,在实际生产中,提高射流式鱼泵工作流体流量可以提高鱼类翻转率,从而降低鱼类逆流游动率,继而提高射流式鱼泵的鱼类输送性能。同时,根据射流式鱼泵内鱼类翻转的特征和位置,其结构设计与优化可以考虑强化泵内两股流体的掺混程度,促使泵内鱼类出现由逆流游动转变为顺流游动的翻转现象。
2.2 鱼类与泵壁面的相互作用
鱼类在射流式鱼泵内的主要表观损伤类型有鳞片脱落、鳃盖损伤和组织挫伤(碰撞伤)等[20]。鳞片脱落和鳃盖损伤可能由射流式鱼泵内多种复杂水力因素造成,但是这些水力因素并不会造成鱼体组织挫伤。通过高速摄影技术发现,射流式鱼泵内出现鱼类与泵内壁面碰撞的现象,是造成鱼体表面组织挫伤的重要原因。
根据高速摄影技术拍摄的图像,得到了鱼类与壁面碰撞时两者的接触时间,并计算出了鱼类在发生碰撞之前及之后的平均径向速度。因此,根据动量定理,可以得到鱼类与壁面碰撞时所受碰撞力的大小
式中为鱼体质量,kg;`0为鱼类在发生碰撞之前的平均径向速度,m/s;`1为鱼类在发生碰撞之后的平均径向速度,m/s;为鱼类与壁面碰撞时两者的接触时间,s。
根据上式,计算出了不同工况下平均鱼类-壁面碰撞力,如图6所示。从整体趋势上看,随着Q的增加,碰撞力也随之增加,在Q较低时碰撞力增加幅度较为剧烈,而Q较高时其变化较为平缓。在Q较低(Q=56 m3/h)时,试验鱼所受力在1~3 N的范围内,而Q较高(Q=80和90 m3/h)时,试验鱼所受力在5~7 N的范围内。在3种试验鱼中,草鱼在大部分工况中所受碰撞力最大,可能与其游动时较大的身体摆动幅度由关,加剧了其碰撞时所受力。因此,随着Q的增加,射流式鱼泵造成鱼类碰撞伤的风险越大。
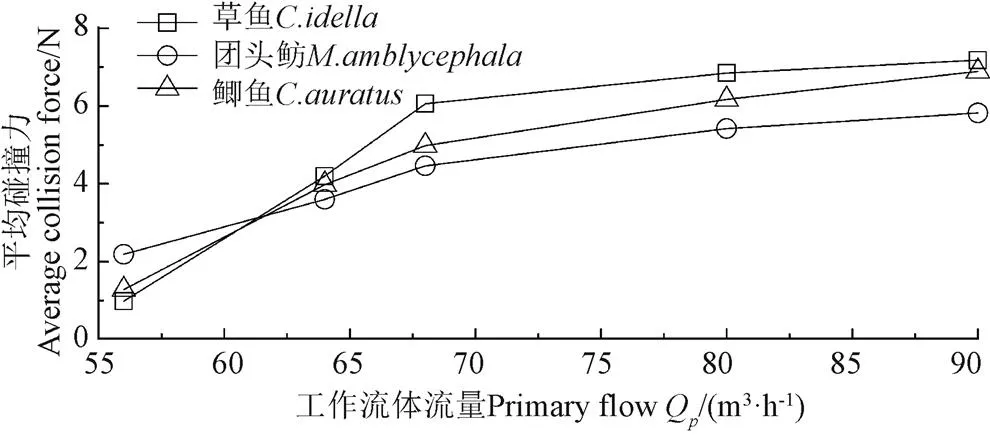
图6 不同工况下平均鱼类-壁面碰撞力
3 结 论
采用高速摄影技术研究了射流式鱼泵工作流体流量对泵内鱼类运动的状态、机理,分析了泵内鱼类组织挫伤的产生原因及与泵工作流体流量之间的关系。根据泵内鱼类运动规律,阐明了其自主游动行为与射流式鱼泵输送性能之间的关系,主要结论如下:
1)射流式鱼泵中逆流游动的鱼类多于顺流游动的鱼类。在工作流体流量较低时,鱼类逆流游动率超过85%,随着工作流体流量的增加,逆流游动率逐渐降低。
2)在工作流体流量较低时,射流式鱼泵中鱼类过泵时间均超过300 ms。随着工作流体流量的增加,该时间逐渐降低。在试验所用3种试验鱼中,草鱼的过泵时间最长。
3)鱼类在射流式鱼泵中存在2种姿态转变方式,即翻转和旋转。在工作流体流量较低时,泵内鱼类姿态变化率较低,均小于6%。随着工作流体流量的增加,该姿态变化率逐渐升高。在试验所用3种试验鱼中,草鱼的姿态变化率最高。
4)射流式鱼泵中鱼类与泵内壁面碰撞是造成鱼类组织挫伤的原因。在工作流体流量较低时,试验鱼所受碰撞力在1~3 N的范围内,而随着工作流体流量的增加,试验鱼所受碰撞力逐渐升高,试验中鱼类所受碰撞力达到5~7 N。在3种试验鱼中,草鱼在大部分工况中所受碰撞力最大。
基于上述研究成果,在后续射流式鱼泵优化设计中,可以考虑改进喉管及扩散管结构,加剧工作流体和被吸流体的掺混程度和范围,促进射流式鱼泵内鱼类翻转率的提升,增加逆流游动鱼类比例,从而降低鱼类过泵时间,实现提升射流式鱼泵的鱼类输送能力。
[1] Summerfelt S T, Davidson J, Wilson G, et al. Advances in fish harvest technologies for circular tanks[J]. Aquacultural Engineering, 2009, 40(2): 62-71.
[2] 郭根喜. 我国深水网箱养殖产业化发展存在的问题与基本对策[J]. 南方水产科学,2006,2(1):66-70. Guo Genxi. The existing problem and basic countermeasure in the industrialization development of deep-water net cage culture in China[J]. South China Fisheries Science, 2006, 2(1): 66-70. (in Chinese with English abstract)
[3] 刘平,徐志强,徐中伟. 离心式吸鱼泵叶轮的设计[J]. 流体机械,2016,44(3):50-54. Liu Ping, Xu Zhiqiang, Xu Zhongwei. Design of Centrifugal Fish Pump Impeller[J]. Fluid Machinery, 2016, 44(3): 50-54. (in Chinese with English abstract)
[4] Roach S W, Claggett F G, Harrison J S M. An air-lift pump for elevating salmon, herring, and other fish of similar size[J]. Journal of the Fisheries Research Board of Canada, 2011, 21(4): 845-849.
[5] 黄滨,关长涛,林德芳. 网箱真空吸鱼泵试验中的技术问题研究[J]. 渔业现代化,2004(6):39-41. Huang Bin, Guan Changtao, Lin Defang. Study on technical problems of fish pump used in offshore aquaculture[J]. Fishery Modernization, 2004(6): 39-41. (in Chinese with English abstract)
[6] 吴宁,李莉,侯杰,等. 射流式鱼泵胁迫下草鱼的应激响应[J]. 华中农业大学学报,2016,35(5):75-83. Wu Ning, Li Li, Hou Jie, et al. Stress reponse of grass carp after passing the jet fish pump[J]. Journal of Huazhong Agricultural University, 2016, 35(5): 75-83. (in Chinese with English abstract)
[7] 徐茂森,龙新平,牟介刚,等. 喉管与喷嘴截面积比对射流式鱼泵输送性能及鱼损的影响[J]. 农业工程学报,2019,35(9):285-290. Xu Maosen, Long Xinping, Mou Jiegang, et al. Experimental research on the influence of sectional area ratio of throat to nozzle on the performance and fish injury in jet fish pumps[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(9): 285-290. (in Chinese with English abstract)
[8] Xu Maosen, Ji Bin, Zou Jialin, et al. Experimental investigation on the transport of different fish species in a jet fish pump[J]. Aquacultural Engineering, 2017, 79: 42-48.
[9] 徐茂森,龙新平,祝叶,等. 射流式鱼泵输送草鱼的性能研究[J]. 南方水产科学,2017,13(1):117-123. Xu Maosen, Long Xinping, Zhu Ye, et al. Research on grass carp conveyance performance of jet fish pump[J]. South China Fisheries Science, 2017, 13(1): 117-123. (in Chinese with English abstract)
[10] Long Xinping, Xu Maosen, Lyu Qiao, et al. Impact of the internal flow in a jet fish pump on the fish[J]. Ocean Engineering, 2016, 126: 313-320.
[11] Xiao Longzhou, Long Xinping, Li Li, et al. Movement characteristics of fish in a jet fish pump[J]. Ocean Engineering, 2015, 108: 480-492.
[12] 徐茂森,龙新平,祝叶,等. 射流式马铃薯输送泵性能试验[J]. 农业工程学报,2016,32(11):48-53. Xu Maosen, Long Xinping, Zhu Ye, et al. Performance experiment of jet potato pump[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(11): 48-53. (in Chinese with English abstract)
[13] 龙新平,邹佳林,徐茂森,等. 改进型环形射流泵输送不同果蔬试验[J]. 农业工程学报,2017,33(7):36-42. Long Xinping, Zou Jialin, Xu Maosen, et al. Experiment on using modified annular jet pump to deliver different fruits and vegetables[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(7): 36-42. (in Chinese with English abstract)
[14] Xiao Longzhou, Long Xinping, Yang Xuelong. Numerical investigation on the influence of nozzle lip thickness on the flow field and performance of an annular jet pump[J]. Journal of Harbin Institute of Technology, 2014, 21(3): 59-67.
[15] Yang Xuelong, Long Xinping, Kang Yong, et al. Application of constant rate of velocity or pressure change method to improve annular jet pump performance[J]. International Journal of Fluid Machinery and Systems, 2013, 6(3): 137-143.
[16] Xu Maosen, Yang Xuelong, Long Xinping, et al. Large eddy simulation of turbulent flow structure and characteristics in an annular jet pump[J]. Journal of Hydrodynamics, Ser B, 2017, 29(4): 702-715.
[17] Xu Maosen, Yang Xuelong, Long Xinping, et al. Numerical investigation of turbulent flow coherent structures in annular jet pumps using the LES method[J]. Science China Technological Sciences, 2018, 61(1): 86-97.
[18] El Gazzar M A A, Meakhail T, Mikhail S. Numerical study of flow inside an annular jet pump[J]. Journal of Thermophysics and Heat Transfer, 2006, 20(4): 930-932.
[19] 赵希坤,韩桢锷. 鱼类克服流速能力的试验[J]. 水产学报,1980,4(1):31-37. Zhao Xikun, Han Zhen’e. Experiments on the current overcoming ability on freshwater fishes[J]. Journal of Fisheries of China, 1980, 4(1): 31-37. (in Chinese with English abstract)
[20] Long Xinping, Xu Maosen, Wang Jiong, et al. An experimental study of cavitation damage on tissue of Carassius auratus in a jet fish pump[J]. Ocean Engineering, 2019, 174: 43-50.
Impact of primary flow rate on fish locomotion law in jet fish pump based on high speed photography
Xu Maosen1, Huang Bin1, Mou Jiegang2, Gu Yunqing2, Zhou Peijian2, Wu Denghao2※
(1.310023,;2.310018,)
Sea cages have been widely used in fish industry in the recent years. Traditional method to transportfish is to lift the fish container, which is energy-intensive and could lead to fish losses. Energy-efficient fish pumps have been developed as a replacement in aquaculture to transport fish aimed to alleviate fish losses. Based on its operating principle, traditional fish pump can be classified into three types: Impeller fish pump, pressure/vacuum (P/V) fish pump, and jet fish pump. The impeller fish pump has specially designed high-speed rotating blades, which are efficient to transport fish but could hit the fish and result in casualties. The P/V fish pump is more friendly to the fish, but its discontinuous operation in suction and discharge is inefficient in energy. In contrast, the annular jet pumpworks by transferring momentum from a high-velocity primary stream to a secondary stream, improving its overall performance compared to other two fish pumps due to its non-rotation and continuous operation. Based on high speed photography, this paper presentsan experimental study on impact of the primary flow rate on locomotion of,andin a jet fish pump under five operating conditions. The experimental results showed that with primary flow rate increasing, both percentage of backward-moving fish and the average transit time of the fish decreased,while the posture change rate and the average collision force betweenthe fish and the wall increased. At low primary flow rate, the percentage of backward-moving fish was above 85%, the average transit time of the fish was more than 300 ms, the posture change rate was less than 6% and the average collision force between the fish and the wall was between 1 and 3 N. At the high primary flow rate, the percentage of backward-moving fish was between 50% and 85%, the average transit time of the fish was between 125 and 175 ms, the posture change rate was between 9% and 18% and the average collision force of the fish was between 5 and 7 N. Among the three types of fishes,had the longest transit time and highest posture change rate in the pump; they also suffered the biggest collision force with the cage wall in most operating conditions. Our results alluded that the jet fish pump can be optimized by intensifying the mixture of the primary flow and the secondary flow in the suction chamber and the throat to increase the posture change rate of the fish. This can reduce the transit time of the fish and increase the transport performance of the pump. In summary,the main contribution of our work is elucidation of the influence of the primary flow rate on locomotion of fish injet fish pump. It provides guidelines tooptimization of jet fish pump with locomotion of fish in consideration.
fish; high speed photography; jet fish pump; primary flow rate; fish locomotion
2019-06-27
2019-08-29
国家自然科学基金(51909235,51779226,51609212)和中国博士后科学基金(2018M642477)联合资助
徐茂森,助理研究员,博士,主要从事环境友好型水力机械方面的研究。Email:msxu@zjut.edu.cn
吴登昊,副教授,博士,主要从事流体机械优化设计及两相流等方面的研究。Email:wudenghao@aliyun.com
10.11975/j.issn.1002-6819.2019.17.010
S951
A
1002-6819(2019)-17-0074-05
徐茂森,黄 斌,牟介刚,谷云庆,周佩剑,吴登昊. 高速摄影技术分析射流式鱼泵流量对鱼运动规律影响[J]. 农业工程学报,2019,35(17):74-78. doi:10.11975/j.issn.1002-6819.2019.17.010 http://www.tcsae.org
Xu Maosen, Huang Bin, Mou Jiegang, Gu Yunqing, Zhou Peijian, Wu Denghao. Impact of primary flow rate on fish locomotion law in jet fish pump based on high-speed photography[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(17): 74-78. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.17.010 http://www.tcsae.org