履带自走式果园气爆深松施肥机研制
2019-11-11沈从举贾首星张立新代亚猛马文霄
沈从举,贾首星,张立新,周 艳,李 帆,代亚猛,张 景,马文霄
农业装备工程与机械化
履带自走式果园气爆深松施肥机研制
沈从举1,2,3,贾首星2,3,张立新1,3※,周 艳2,3,李 帆2,代亚猛2,张 景2,马文霄1
(1. 石河子大学机械电气工程学院,石河子 832000;2. 新疆农垦科学院机械装备研究所,石河子 832000;3. 农业农村部西北农业装备重点实验室,石河子 832000)
针对现有果园人工施肥作业劳动强度大、效率低,以及机械开沟、挖穴施肥作业翻动土壤破坏土层结构和损伤果树根系的问题,该文结合新疆及中国北方干旱区果园土壤深松和深位施肥的要求,研制了一种履带自走式果园气爆深松施肥机,解决了坚硬土层快速打穴、定量取肥排肥、高压气爆深松施肥等关键技术难题。该机采用全液压驱动履带行走方式,主要由打穴注肥装置、定量加肥装置、气爆发生装置等关键部件组成,可一次完成果树根部土层定点打穴、气爆松土和定量深位施肥等多道工序。为提高作业效率和施肥效果,以单次作业时间和肥料扩散半径为评价指标,以打穴深度、施肥插杆内径、气爆压力为影响因素,进行了二次旋转正交组合试验,通过Design-Expert V8.0.6.1软件,建立了评价指标与各影响因素的数学回归模型,分析了显著因素对评价指标的影响,优化试验参数,确定最优参数组合为:打穴深度600 mm、施肥插杆内径30 mm、气爆压力0.6 MPa。田间验证试验结果表明:在优化参数组合下,单次作业时间为22.1 s,肥料扩散半径为413.6 mm。试验样机经新疆维吾尔自治区农牧业机械产品质量监督管理站检测,各项检测指标均达到了样机设计的技术要求。该研究成果可为果园气爆深松施肥机产品研发与改进提供技术支撑。
机械化;设计;优化;施肥机;气爆深松;定量追肥
0 引 言
果树是多年生木本作物,根系一般分布较深且范围较广,需要土层深厚、通透性好和水肥充足的土壤环境[1]。新疆作为中国主要的特色林果产区[2],地处西北内陆干旱区,大多数果园土层薄、土质贫瘠,而且由于果农长期以来不重视果园土壤管理,以及施肥不当造成的土壤板结硬化问题日益突出,导致土壤通透性较差,施肥利用率偏低,不利于果树根系延伸和生长发育,容易发生病害。因此,亟需通过有效深松和合理施肥措施进行土壤改良。国内现有开沟施肥机的开沟深度较浅、施肥范围相对集中,不利于肥料的充分利用[3];挖穴施肥机仅能完成机械钻穴,施肥过程仍需人工完成,作业效率较低[4];常规的机械式深松机需要配套的动力大,能耗较大[5-6]。上述机型都不可避免地因翻动土壤而破坏土层结构和损伤果树根系。
近年来,基于土体气压劈裂原理[7],孔德刚等提出了气压式土壤深松方法[8];左胜甲等开展气压深松效果试验[9],设计出一种拖拉机牵引式气压深松机,通过对耕地注入高压气体,实现气压深松作业[10]。李霞等设计了一种拖拉机悬挂式气动深松施肥机,在机械深松的同时,通过向深松铲尖及铲柄注入压缩空气辅助破土壤板结[11]。日本马克株式会社增子利一等研制出一种小型手扶式土壤改良机,通过向果树根部注入压缩空气实现快速松土和深层施肥(土壤改良剂),能够有效改善根区土壤环境,促进果树根系延伸和对养分的充分吸收[12-13]。张瑞宏等提出了一种气动深松施肥装置及方法[14],并设计了不同类型的气动深松施肥机[15-16];适用于液肥注施;奚小波等设计了一种与拖拉机后悬挂的果园气爆松土注肥机[17],可完成气爆松土和液肥注射,并对气爆松土参数进行了优化[18]。贾首星等设计了一种锤击装置及该装置构成的气爆深松施肥机[19],适用于固体肥料。成都天本生物科技有限公司吴福成等设计了一种空气喷爆式土壤深松施肥装置,通过高压气流导入土壤使肥料与土壤较为有效的混合。郑传刚等[20]设计了一种果园深层土壤输氧松土施肥机,通过向深层土壤输送高压空气实现土壤输氧和松土,需要人工将肥料灌入松土形成的孔洞。窦传峰[21]设计了一种深层松土施肥机,采用人工手持操作,通过气动方式将松土杆压入土壤深层,利用压缩空气将一定量液态肥、固态肥或农药注入土中。以上日本机型和动力较小,不适用于中国果园种植模式和土壤条件。国内有关机型实现了土壤深松和定量施肥功能,但普遍为与拖拉机配套作业机型和人工辅助作业机型,与拖拉机配套作业机型受果园作业空间和液肥负载限制,田间行走越障及转向操作不便,影响作业效率;人工手持辅助作业机型自动化程度、作业效率低、劳动强度大;在施肥种类上主要以液肥注施为主,一般采取先松土后注肥的分步作业方式。
本文针对现有果园人工施肥作业劳动强度大、效率低[22],以及机械开沟、挖穴施肥作业翻动土壤破坏土层结构和损伤果树根系的问题,在借鉴国内外相关研究成果的基础上,结合新疆及中国北方干旱区果园种植特点和土壤条件,研制一种履带自走式果园气爆深松施肥机,满足土壤深松和固体颗粒肥料定位深施的要求[23],不仅可以单独完成气压深松作业,而且可以实现“气带肥”同步松土注肥作业,提高整机作业效率和自动化水平。
1 整机结构与工作原理
1.1 整机结构
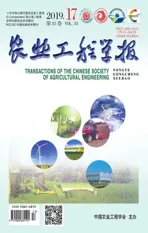
履带自走式果园气爆深松施肥机采用全液压驱动履带行走方式,主要由打穴注肥装置、定量加肥装置、气爆发生装置等关键部件组成。整机结构如图1所示。
1.乘座椅 2.操纵手柄 3.发动机 4.肥箱 5.打穴注肥装置 6. 储气罐 7.定量加肥装置 8.履带行走底盘 9.液压支腿 10.操作面板 11.柴油箱 12.空压机 13.气爆发生装置 14.液压油箱
1.2 工作原理
该机利用高压气爆松土施肥原理,采取对果树施肥部位打穴注施方式,将高压空气和定量肥料同时注入根部土壤,实现气爆松土和定量施肥。工作过程中,通过空压机给气爆发生装置充气加压至所需工作压力,启动定量加肥装置将一定量的颗粒肥料导入排肥管,再启动气爆发生装置,其产生的高速气流经排肥管携带肥料形成气固两相冲击射流,并由施肥插杆注入果树根部深层密闭土壤,利用其瞬间产生的强大爆破冲击力使土壤发生劈裂,形成裂隙[24-25],实现高压气爆松土[26];同时注入的肥料被冲击破碎并沿松土裂隙运移扩散分布于根区土壤,实现深层扩散施肥[13]。
1.3 主要技术参数
结合新疆果园主栽模式、土壤质地和深松施肥要求,要满足2.5~4.0 m不同行距果园的通过性要求,并且深松施肥深度不少于500 mm,确定履带自走式果园气爆深松施肥机的主要技术参数,如表1所示。
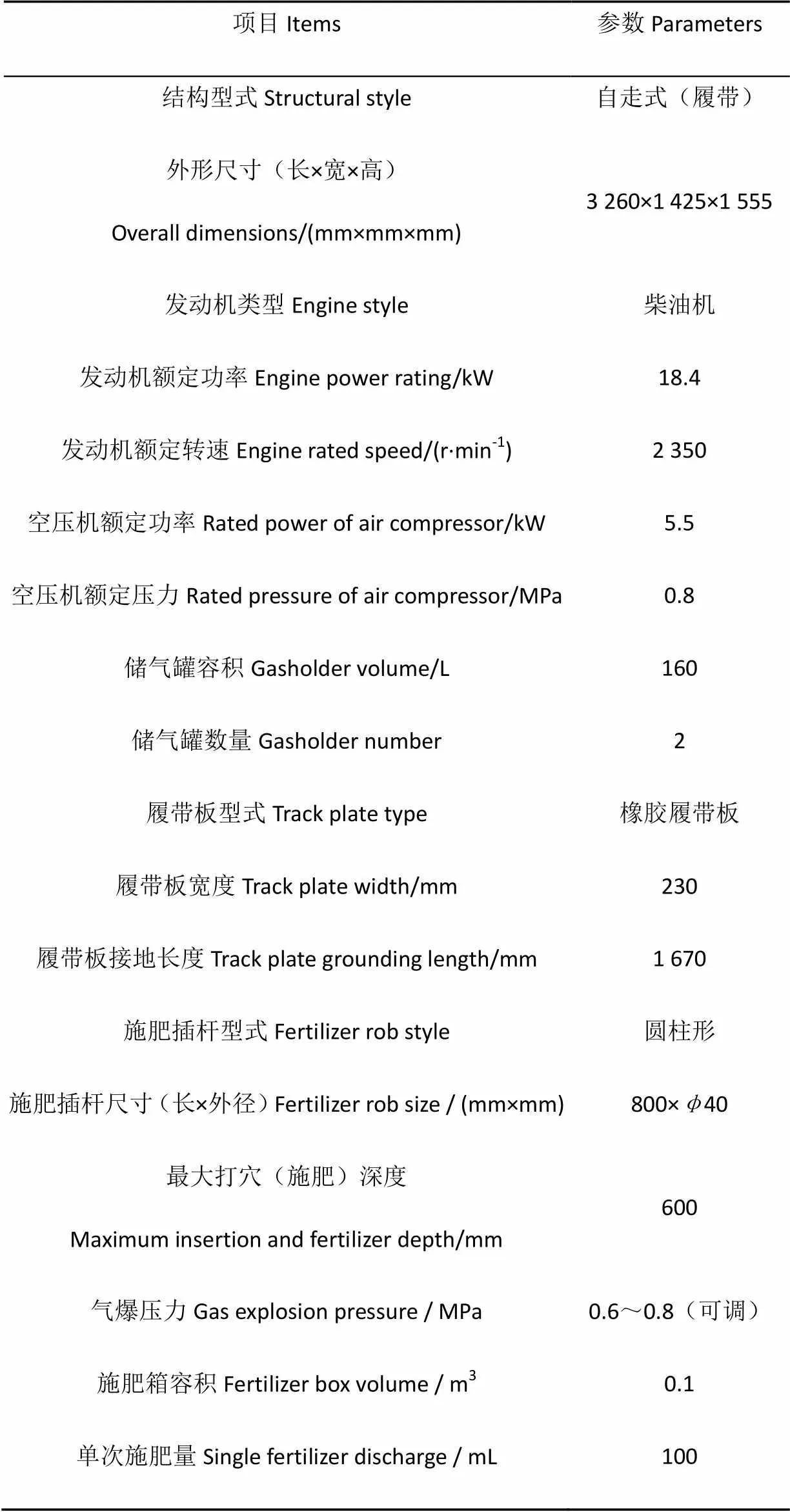
表1 整机主要技术参数
2 关键部件设计
2.1 打穴注肥装置
打穴注肥装置如图2所示,其中导向总成由连接轴、连接板和导向滚轮组成,分别与打入提升机构、锤击装置和滑轨机构连接,组合形成液压打穴联动系统。注气注肥联通器上端与锤击装置内置的活塞连接,下端与施肥插杆连接,组合形成气力锤击系统。当施肥插杆在打入提升机构的油缸强压作用下遇到犁底层或板结层等坚硬土层而无法克服其阻力完成指定打入深度时,启动锤击装置可以保证施肥插杆在油缸强压和气力锤击的联合作用下,打破犁底层或板结层,实现快速打穴作业。打穴注肥结束后,只有打入提升机构提升到设定位置并被电感式接近开关检测到后,方可移动机车,否则操作无效,从而保护施肥插杆不被折弯和机车行驶安全。
1.打入提升机构 2.标尺机构 3.电感式接近开关 4.锤击装置 5.导向总成 6.注气注肥联通器 7.施肥插杆 8.喷气肥口 9.滑轨机构
打穴注肥装置工作状态如图3所示,状态a为打入提升机构的初始状态,即最大提升位置,此时油缸()活塞杆行程为0,摇臂()与水平方向的夹角为98°,标尺杆位于刻度30处,表示地面以上喷肥口中心距离地面30 cm;状态b为施肥插杆下端与地面接触时的状态,此时摇臂()与水平方向的夹角为115°,标尺杆位于刻度0处;状态c为施肥插杆打入土壤最深处的状态,喷气肥口中心距离地面600 mm,即最大施肥深度可以达到600 mm,此时油缸()活塞杆达到最大行程190 mm,摇臂()与水平方向的夹角为68°,标尺杆位于刻度-60处,表示地面以下喷肥口中心距离地面60 cm。
2.1.1 打入提升机构
打入提升机构安装在底盘机架上,由左右对称布置的2个升降臂()、2个摇臂()和2个液压油缸()组成(如图3),双油缸驱动升降臂带动导向总成沿滑轨机构的滑道上下滚动,实现施肥插杆的垂直打入土壤和提升拔出运动。
打入提升机构工作过程中,图3中点作抛物线运动,状态b时的点位置为抛物线的顶点;点作圆周摆动,状态b和状态c的点位置为摇臂的2个极限位置,摇臂2个极限位置的角度差为47°;点作直线往复运动,状态a和状态c的点位置为升降臂的两个极限位置,最大行程为1 012 mm。
2.1.2 锤击装置
锤击装置结构与工作状态如图4所示。工作原理:以压缩空气为动力,利用缸锤与锤芯相对运动而形成的气路循环变化,通过缸体工作腔的充气和排气循环,实现缸锤和锤芯上下往复运动,从而反复锤击活塞,将锤击力传递给施肥插杆,辅助打入提升机构快速打穴。
1.缸体 2.工作腔 3.缸锤 4.进气腔 5.缸锤排气口 6.上端盖 7.上端盖排气口 8.锤芯排气口 9.限位钢珠 10.锤芯 11.缸体进气口 12.缸锤进气口 13.锤芯进气口 14.活塞 15.下端盖
1.Cylinder block 2.Working chamber 3.Cylinder hammer 4.Air inlet chamber 5.Cylinder hammer exhaust port 6.Upper end cover 7.Upper end cover exhaust port 8.Hammer core exhaust port 9.Limit steel ball 10.Hammer core 11.Cylinder body inlet 12.Cylinder hammer inlet 13.Hammer core air inlet 14.Piston 15.Lower end cover
注:缸体进气口11、缸锤进气口12与进气腔4常通。为缸锤和锤芯有效行程,mm;为缸锤上端面直径,mm;为缸锤下端面直径,mm。
Note: Cylinder body air inlet 11, cylinder hammer air inlet 12 and air inlet cavity 4 are normally connected.is the effective stroke of cylinder hammer and hammer core, mm;is the diameter of the upper end face of the cylinder hammer, mm;is the diameter of the bottom end face of the cylinder hammer, mm.
图4 锤击装置结构与工作状态示意图
Fig.4 Structure and working state of hammer device
工作过程:开始工作时,缸锤3和锤芯10处于缸体1内的下部并与活塞14接触(活塞14位于活塞腔的上部),此时缸锤进气口12与锤芯进气口13连通(二者排气口5和8不连通),当操作锤击手柄时,压缩空气由缸体进气口11进入进气腔4和工作腔2,由于缸锤3上下端面的面积不同而产生的压力差及作用力(抬升力)1,克服缸锤3和锤芯10的自身重力推动二者向上抬升,锤芯10先与上端盖6接触后停止运动,而缸锤3则继续向上运动,限位钢珠9安装在缸锤3和锤芯10之间,随缸锤3抬升至上限位置时,缸锤3也停止运动,此时达到最大抬升位置(图4a),缸锤排气口5与锤芯排气口8连通(二者进气口12和13不连通),压缩空气由上端盖排气口7排出,工作腔2泄压,缸锤3和锤芯10在自身重力和进气腔压力0的共同作用下产生锤击力2,快速下落(匀加速直线运动)接触活塞14时开始锤击(图4b),在锤击力作用下活塞14向下产生位移,完成一次锤击过程。
锤击过程中,缸锤3和锤芯10的气路发生改变,缸锤进气口12与锤芯进气口13再次连通(二者排气口5和8不连通),回到初始位置,压缩空气再次注入工作腔,开始下一次锤击过程并依次循环工作。
工作过程中缸锤和锤芯的抬升力、锤击力、冲击频率、瞬间冲击动能等工作参数设计计算如下
缸锤和锤芯的抬升力
缸锤和锤芯的抬升应满足的条件