嫦娥四号巡视器遥操作地面支持系统设计
2019-11-11金晟毅李海飞彭松温博贾阳申振荣田鹤张天翼
金晟毅 李海飞 彭松 温博 贾阳 申振荣 田鹤 张天翼
(北京空间飞行器总体设计部,北京 100094)
国外从20世纪60年代开始研制能够支持月球或火星巡视探测的地面遥操作控制系统,20世纪70年代苏联的月球车-1(Lunokhod-1)和月球车-2(Lunokhod-2)巡视器地面系统仅支持地面人员根据小画幅图像进行综合的判断和控制,效率较低,缺少局部的自主安全保障[1]。1997年美国“旅居者”(Sojourner)火星巡视器的操作模式采用遥操作加半自主模式,使大延时的地面遥操作成为可能[2]。美国“火星探测巡视器”(MER)和好奇号火星车本身具有较高的自主能力,地面遥操作系统可支持科学家和工程人员开展评估、分析、规划、仿真和决策等处理,使巡视器能够完成较复杂的科学探测任务[3]。欧洲航天局预计2020发射的火星生物学(ExoMars)探测器,建立了巡视器操作控制中心(The Rover Operation Control Center,ROCC)用来对执行巡视器的遥操作任务,使其在火星地形仿真系统的基础上,实现巡视器的操作控制[4-5],目前ROCC还处于建设阶段。我国于2018年12月8日发射的嫦娥四号探测器实现了人类首次的月球背面巡视探测,其地面遥操作控制系统需要考虑环境温度、光照、测控、能源以及中继通信等各方面的约束,在非结构化复杂的月背任务执行环境中,及时安全准确的制定巡视探测目标、运行路线和科学探测策略等,并结合巡视器自有的自主导航能力,安全高效地控制巡视器完成科学探测任务。
本文以嫦娥四号巡视器月面巡视任务为背景,针对嫦娥四号巡视器遥操作地面支持系统自身特点和工作方式进行了研究、设计和系统构建。该系统成功支持并完成了嫦娥四号巡视器设计寿命期内的遥操作支持任务。
1 系统功能和总体设计
为了在非结构化复杂环境中确保月面巡视探测任务的可靠安全执行,巡视器操作控制系统采用“巡视器-地面系统”功能一体化设计。月面巡视器和地面支持系统间通过前、返向通信链路相互进行信息传递。巡视器具有一定的自主能力,能够完成自主导航行走等动作。如图1所示,巡视器、中继卫星、地面测控网以及地面支持系统共同组成一体化系统,共同协同配合完成月面巡视探测任务。下文重点针对图1中地面支持系统部分的设计进行说明。
通过借鉴美国“火星探测巡视器”地面控制系统和欧洲航天局“巡视器操作控制中心”系统的设计经验,嫦娥四号巡视器地面支持系统的设计,一方面能够实现对巡视器运行状态的多维可视化监视,另一方面兼顾对巡视器任务环境的数字和物理模型构建,在构建的模型上开展对月面巡视器规划控制策略的数字或物理仿真验证,提高了巡视器在轨运行的控制安全性和可靠性。
地面支持系统采用模块化设计和实现,系统构成示意如图2所示,地面支持系统包括接口与信息管理模块、数字环境构建模块、规划策略数字仿真模块、任务决策及策略规划模块、可视化呈现模块以及物理仿真模块。其中物理仿真模块还需要包括验证器供电及控制模块、月面环境构建平台、巡视器验证器、月面环境测量模组等。
2 系统设计和实现
巡视器执行月面任务期间,地面支持系统中的接口与信息管理模块从地面测控中心处接收巡视器下行的工程遥测和图像文件数据,完成数据解析和处理后分发给数字环境构建模块生成数字环境模型(见图2)。
任务决策及策略规划模块基于数字环境模型,选择和确认下一步的任务目标,并对目标所需要巡视器完成的动作控制策略进行规划。控制策略规划完成后将控制策略提交规划策略数字仿真模块进行数字仿真,同时决策是否启动物理仿真模块进行物理仿真。
规划策略数字仿真模块和物理仿真模块,根据需要按照数字环境模型构建仿真环境,并开展控制策略的仿真验证,将仿真过程数据连同接口与信息管理模块处理后的遥测和图像,数字环境构建模块生成的数字环境模型,送至可视化呈现模块进行多维状态呈现。任务决策及策略规划模块根据呈现的状态,决策巡视器的任务执行状态与控制策略是否正确和匹配,并将决策后的控制策略文件通过接口与信息管理模块回送给地面测控中心进行月面巡视器的遥控操作。
2.1 接口与信息管理模块
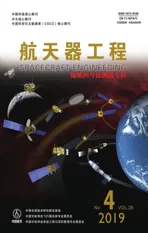
接口与信息管理模块主要负责处理对内和对外两个层面数据,对内负责处理、分发、存储和管理地面支持系统内部数据、信息和文件,对外则与地面测控中心之间进行数据和文件交换,接口与信息管理模块设计如图3所示。
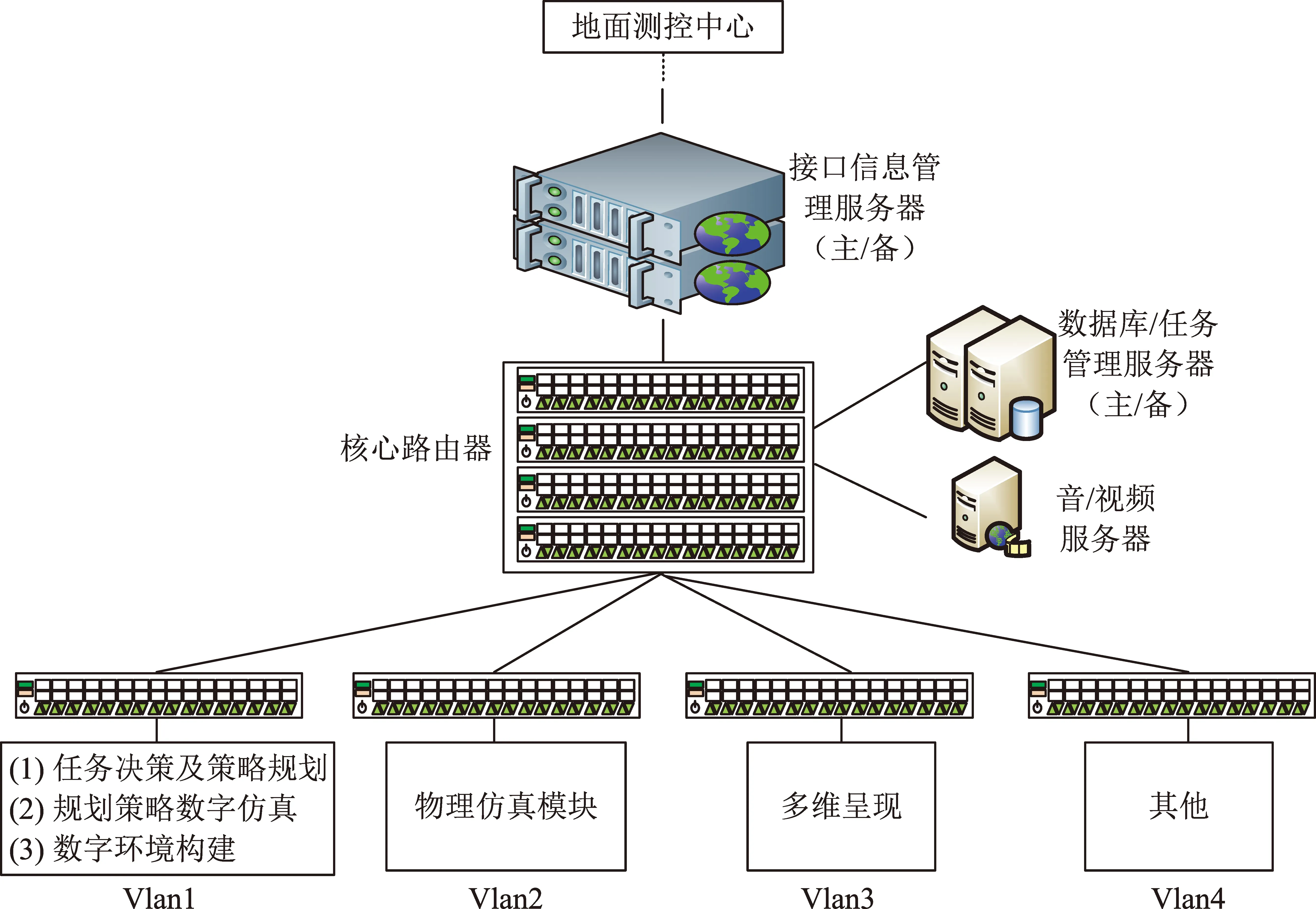
图3 接口与信息模块设计示意图
接口与信息管理模块负责任务支持系统整体信息交换的构架设计,主要设置有接口信息管理服务器、数据库/任务管理服务器和音/视频服务器,以及辅助网络设施和计算机。设计有不同的Vlan实现系统模块化功能划分和组装,同时实现数据共享及管理。
接口信息管理服务软件运行在主备两个P910工作站上,软件使用Qt跨平台编译器实现C++语言编制,代码运行于Redhat Linuix 5.5平台。数据库和任务管理服务器使用基于MongoDB的分布式文件存储数据库,实现对任务和数据的存储和管理。
2.2 数字环境构建模块
巡视器上的双目相机将会对所处的月面环境进行环拍。数据下传至地面支持系统进行图像解码、融合拼接、三维地形重构和数字微分纠正和填充,形成正摄影像图(Digital Orthophoto Map,DOM)和数字高程模型(Digital Elevation Model,DEM)。图4是巡视器完成环拍后扇形拼接图,图5是经过三维地形重构和处理生成的DEM图和DOM图。
将生成的地形产品与巡视器或着陆器三维模型、历史地形产品进行特征点和位置拼接融合,完成数字环境构建。图6是完成的数字环境构建示意图。
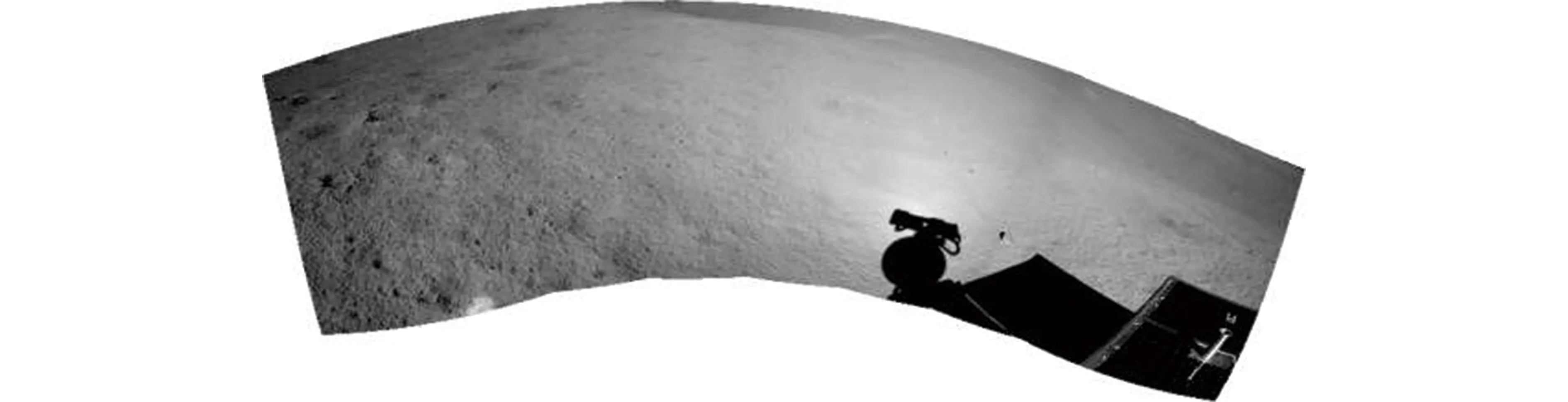
图4 全景拼接图
图5 DEM和DOM图
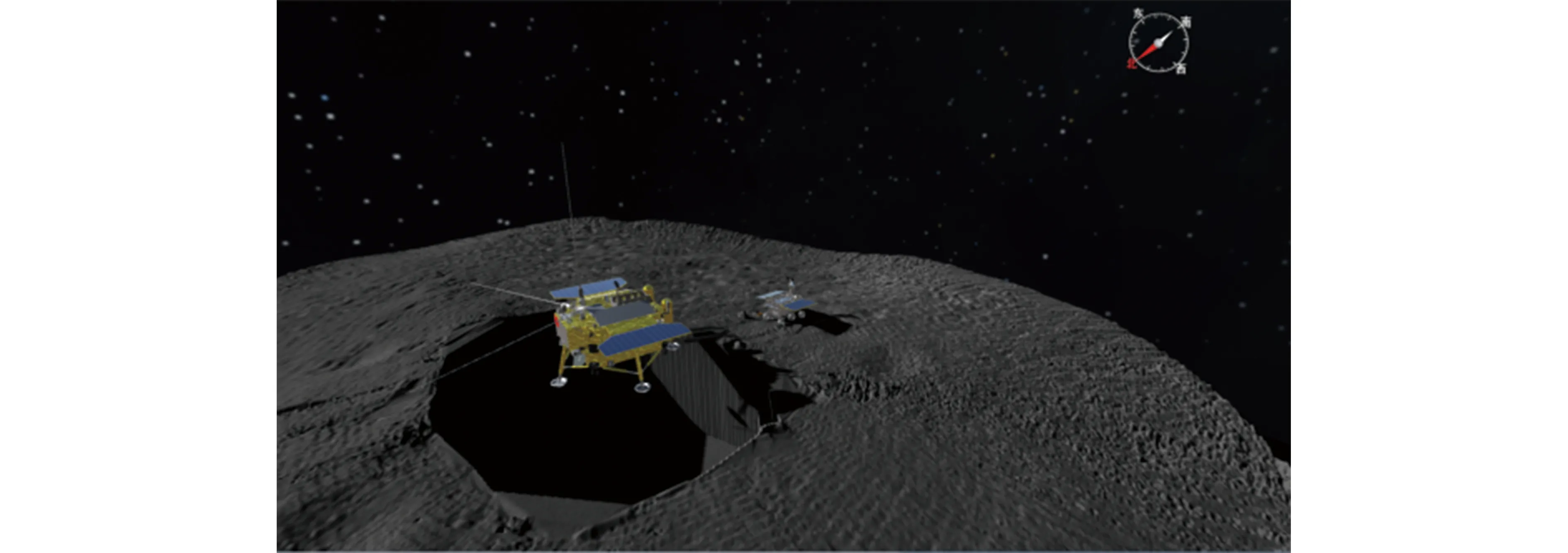
图6 数字环境模型的可视化示意图
2.3 任务决策和策略规划
任务决策和策略规划是在基于构建的数字环境模型上,对下一步任务目标进行确定,并对确认后的目标所需要巡视器完成的动作控制策略进行规划。常规情况下,该部分需要完成行走规划、定向天线对中继卫星指向规划及太阳翼对日定向规划计算等功能。
1)行走规划
由于在月面表面上行走,规划空间可以仅考虑二维情况[6]为
{(x,y)||x|≤δx,|y|≤δy}
(1)
式中:(x,y)表示以巡视器当前位置为坐标系原点O,X、Y方向的偏移量分别为x、y的平面空间上的点,δx和δy分别为X、Y方向位置约束。
将当前地形产品DEM图,分割为(2M+1)×(2N+1)个网格单元(其中M和N为正整数)形成二维地图矩阵MA,对空间的网格点C(i,j)的定义为
{C(i,j)∈MA|x=i,y=j,(|i|≤M,|j|≤N)}
(2)
定义起点所在网格单元标识为S(0,0)∈MA,将给定目标点所在的网格标识为G(x,y)∈MA。
为确保安全,一般要求巡视器行走在较为开阔并且地形较为平坦的路径之上,路径还应保证与大石块、深坑和急陡坡有一定的安全距离。为此需对二维地图矩阵MA上的每个单元的地理信息进行评价,并转换为风险代价矩阵MC。
根据本文所述数字环境模型的特点,风险代价矩阵的算法是以S(0,0)为起点使p=S(0,0),取其邻域Lp(定义如式(3))的高程值,如图7、图8所示,计算p的梯度向量ΔHp以及二阶梯度向量Δ2Hp。
{C(i,j)⊂Lp|C(i,j)∈MA,
(3)
每个网格p点向量表示为{i,j,Hp,ΔHp,Δ2Hp|i|≤M,|j|≤N},反应了相应的位置和地形纹理特征。其中ΔHp通过式(4)计算得出,Δ2Hp通过式(5)计算得出。
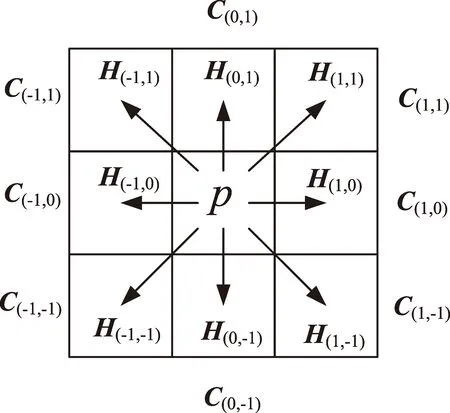
图7 梯度向量计算示意
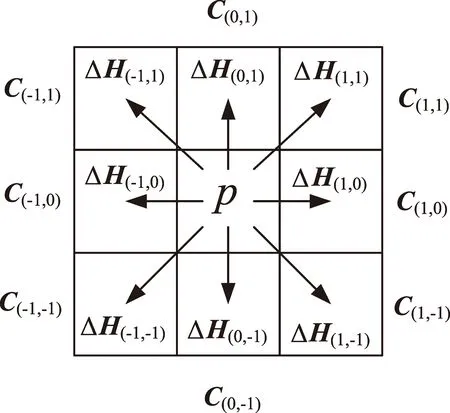
图8 二阶梯度向量计算示意
(4)
(5)
每个p网格点的位置和纹理属性均是以起始点S为基准进行计算,这样计算的好处是能够较为方便的理解相对于当前巡视器的位姿,展现出地形上的相对坡起和下凹。对二维地图矩阵MA上的每个网格点p进行分类,识别出巡视器不可放置或通过区域,并以2个单元的约束进行膨胀外扩,确保行走路径规划的安全,同时将纹理特征不明显的点赋予较小的代价值,形成风险代价矩阵MC。图9是渲染后的风险代价矩阵MC,绿色区域是纹理特征适合于巡视器通过的网格点,橙色是具有较大代价值的网格点,红色区域为不可放置或通过区域。基于该MC采用A*算法[7]进行最优行走路径规划,形成的规划路径结果如图10所示。
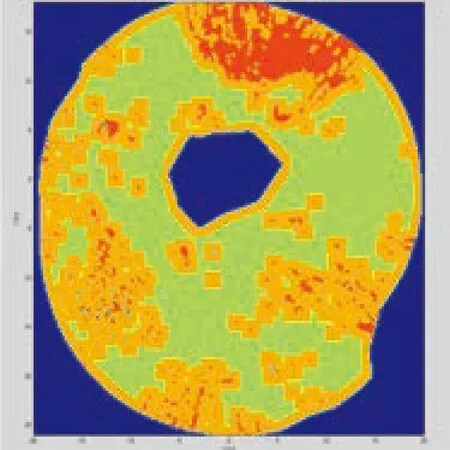
图9 渲染后的MC示意
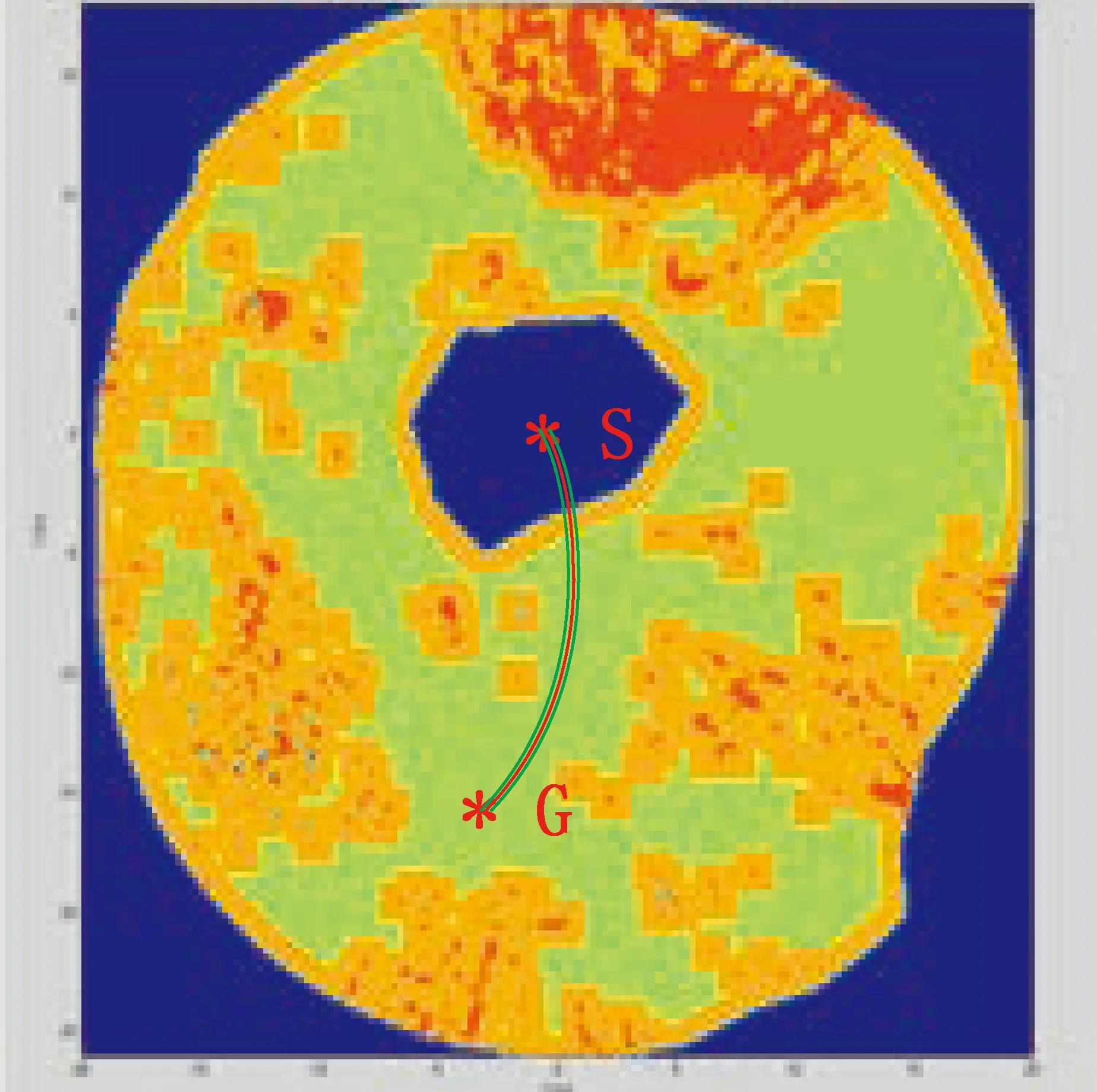
图10 S点至G点路径规划结果
2)定向天线对中继卫星指向规划
根据中继卫星轨道根数,以及巡视器在月面的位置(经度、纬度)、姿态(偏航、俯仰、滚动)和指向时刻,计算定向天线的两个转角,然后控制定向天线在指向时刻运动到位(计算过程要提前,以保证定向天线恰好在指向时刻运动到位),实现定向天线对准中继卫星。
定向天线对中继卫星指向规划算法在文献[8]中已有详细介绍,与文献中介绍的定向天线对地指向规划方法类似,对中继卫星的指向规划算法流程如图11所示。
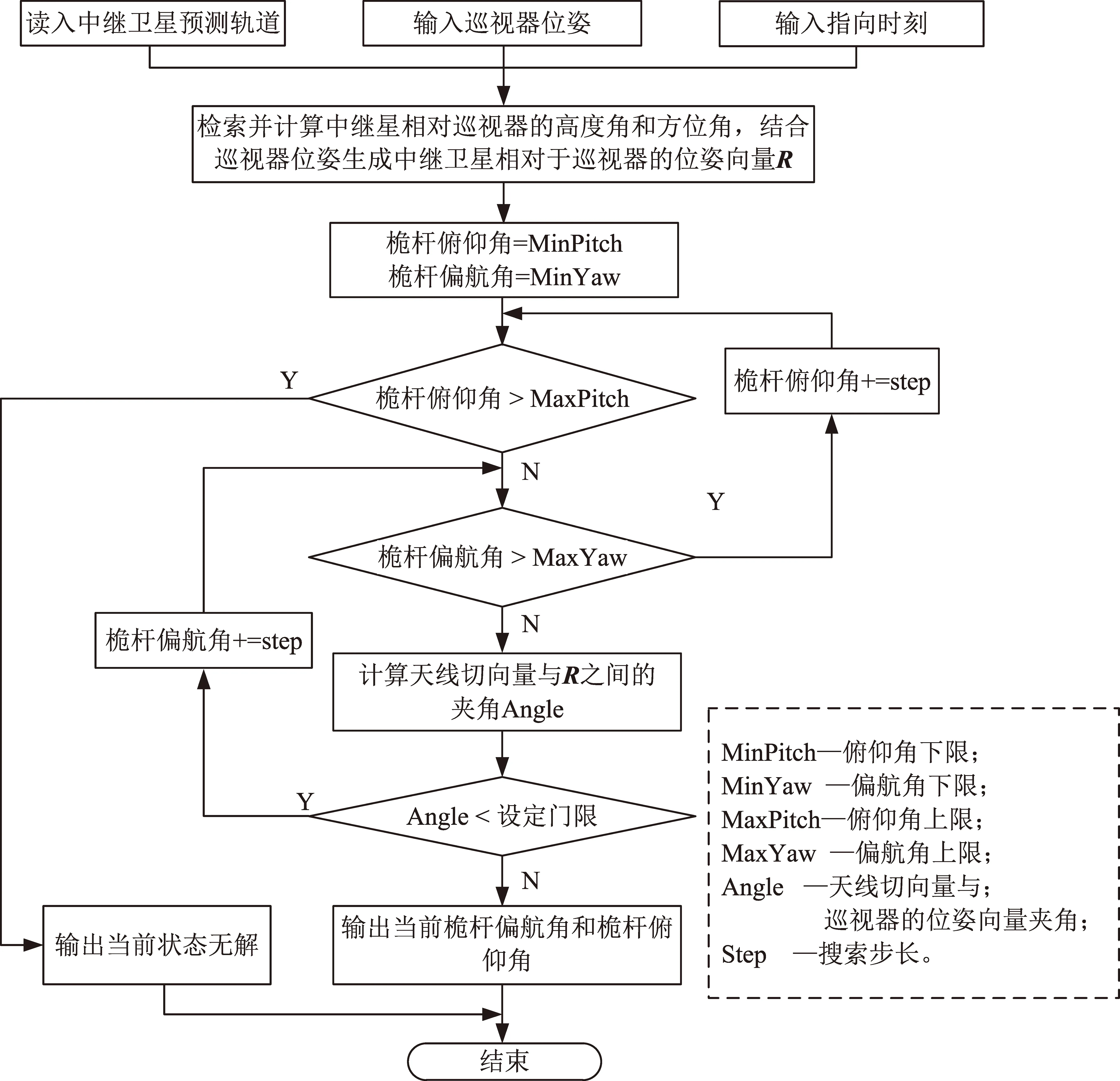
图11 定向天线中继指向规划算法流程
针对当前巡视器与中继卫星的位姿状态下无解的情况,可通过巡视器原地转弯改变巡视器姿态操作,使定向天线能够指向中继卫星。
(4)稳健性检验。通过上文的实证分析,发现根据实证检验验证得到上文的三个假设都是合理的,为了提高本文研究结果的可信度,本文又利用应计—现金流关系模型对BASU模型进行进一步检验。利用应计—现金流模型,需要选取上文所研究公司的相关财务数据,在此基础上加上上文所研究的三个变量(内部控制评价主体、内部控制缺陷、内部控制评价报告),不改变7个自变量的数据处理方法,进行多元线性回归分析,进而得到三个变量对会计稳健性影响结论,对比发现这两个模型所得到的研究结论具有一致性。
3)太阳翼对日指向规划
同定向天线指向中继卫星算法类似,在当前巡视器位姿状态下,通过时间检索当前太阳相对巡视器的相对位置,并形成位姿向量Rsun,通过遍历巡视器+Y太阳翼所有可能的展开角度,计算寻找太阳翼法向量相对与位姿向量Rsun的夹角最小的展开角度,并进一步计算太阳光在太阳翼面上的正射投影面积,可估计太阳翼的发电功率等信息。
2.4 策略规划的数字化仿真
策略规划的数字化仿真是将任务决策和策略规划所生成的规划成果,结合构建的数字环境,模拟驱动巡视器执行规划成果中要求的动作,并实时输出巡视器状态信息和风险警告。
地面支持系统设计所支持的巡视器原地转弯规划、曲线行走规划仿真,如图12和图13所示,能够对巡视器行进过程的路径、姿态和车辙进行3D呈现,辅助操作人员决策行进策略是否合理可行。

图13 曲线行走仿真规划
此外系统还能够对定向天线指向中继卫星规划、太阳翼指向太阳规划进行仿真,如图14和图15所示,仿真结果能够帮助操作人员决策规划的正确与否。相机视场仿真,能够模拟巡视器上的相机传感器视场,进行相机视场呈现。仿真结果如图16所示。
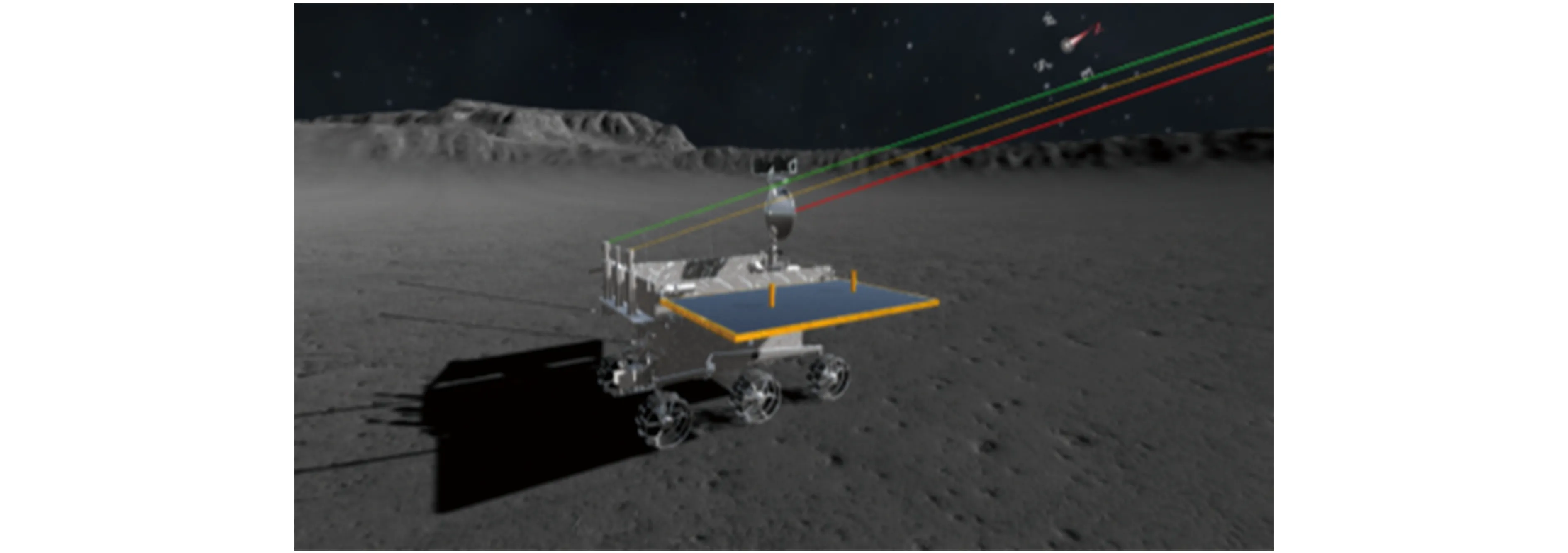
图14 定向天线指向中继卫星规划仿真

图15 太阳翼指向太阳规划仿真
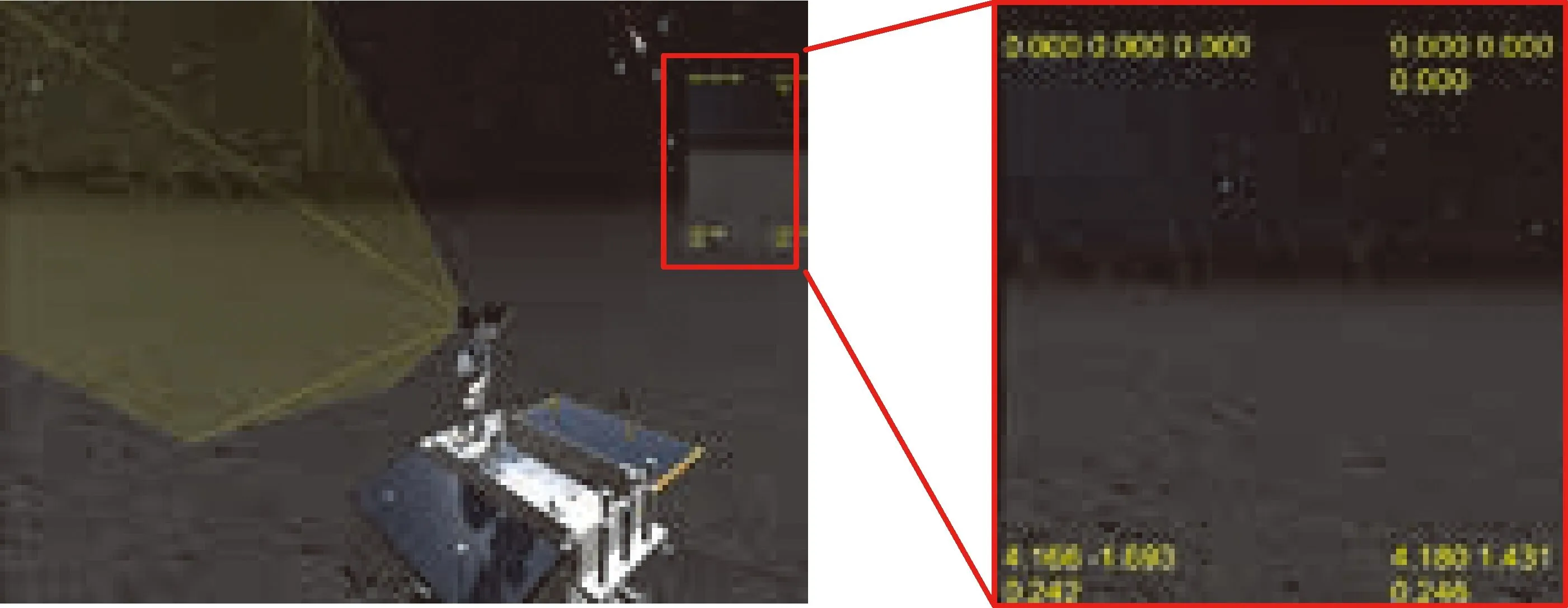
图16 相机视场仿真
策略规划的数字化仿真,能够快速的计算出规划策略是否正确可行的评价,在常规情况下,给予操作人员一定的决策支持。
2.5 物理仿真模块
月面环境构建平台配置用于模拟月面光照的平行光灯阵,用于模拟月面重力的恒拉力随动天车系统以及能够构建月面地形地貌的地形地貌构建平台。当决策需要开展物理仿真验证后,按照月面数字构建的DEM图在地形地貌构建平台上构建模拟地形,之后月面环境测量模组中的激光扫描仪对模拟地形进行扫描生成新的DEM,与月面地形DEM进行误差比对,并进行地形构建完善。地形构建完成后将巡视器验证器吊放置要求的地形位置之上,启动恒拉力随动天车系统模拟月面重力环境。调整平行光灯阵的照射角度和亮度,启动灯阵模拟当前月面光照状态。按照规划的策略控制巡视器验证器完成规定的动作,形成验证报告,交由物理仿真验证决策确认规划策略是否可应用于月面巡视器的操作控制。
图19、图20分别是模拟地形构建的效果以及扫描后生成的DEM图。图21展示了巡视器验证器开展上坡运动策略的物理验证的情况。
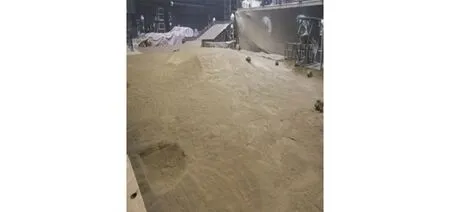
图19 模拟地形构建
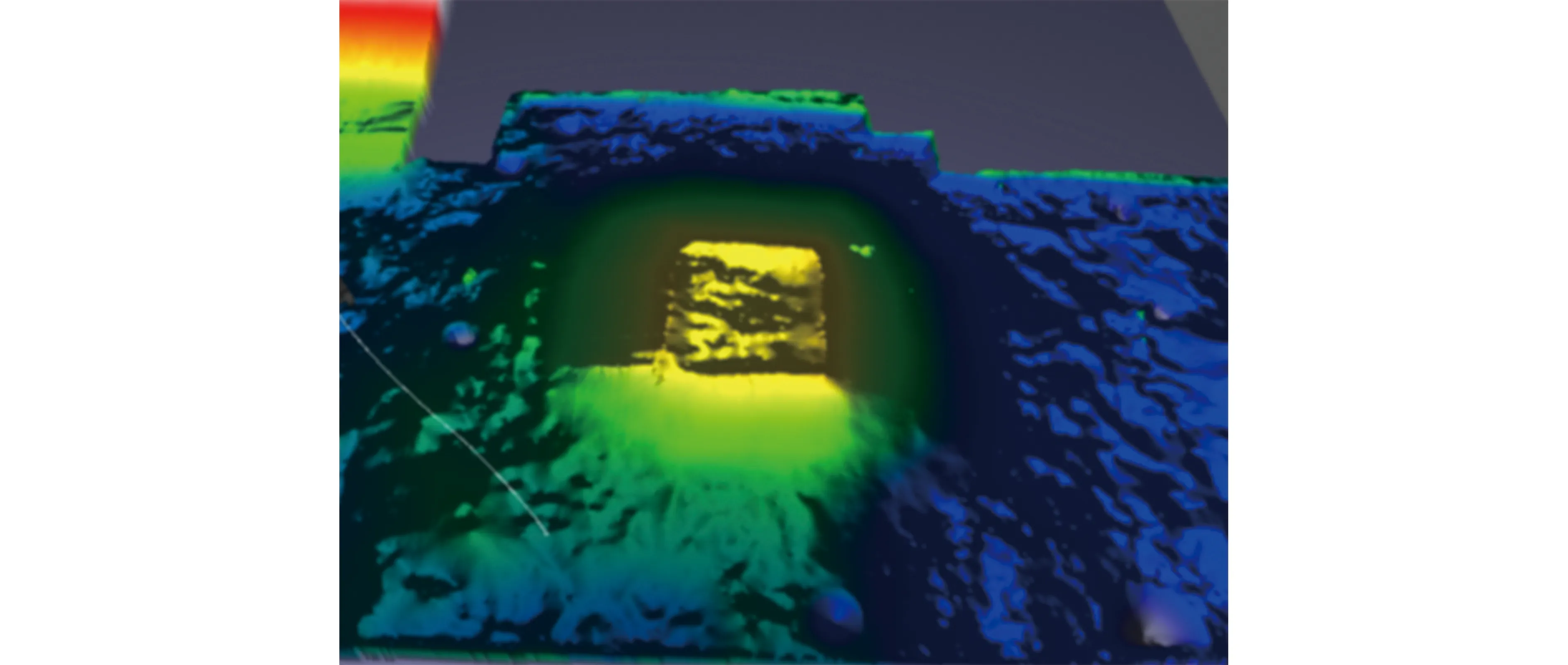
图20 构建模拟地形的DEM图

图21 巡视器验证器进行物理仿真验证
2.6 多维可视化呈现
多维可视化呈现模块将基于构建的数字环境,监收巡视器/验证器下行的工程数据,根据工程数据内容,驱动巡视器/验证器模型中的关节、运动机构和设备模块,将巡视器/验证器状态直观的进行三维呈现。同时结合时间、地形地貌、巡视器机构运行状态等参数,将光照产生的反射和阴影,地形地貌导致的巡视器轮地交互状态以及巡视器机构运行后产生的车辙等进行呈现。辅助地面操作和决策人员准确及时地了解巡视器/验证器工作状态,执行流程示意如图22所示。该模块在执行任务前启动,循环并持续监收加载最新构建的数字环境模型及各类工程数据,进行多维可视化呈现。
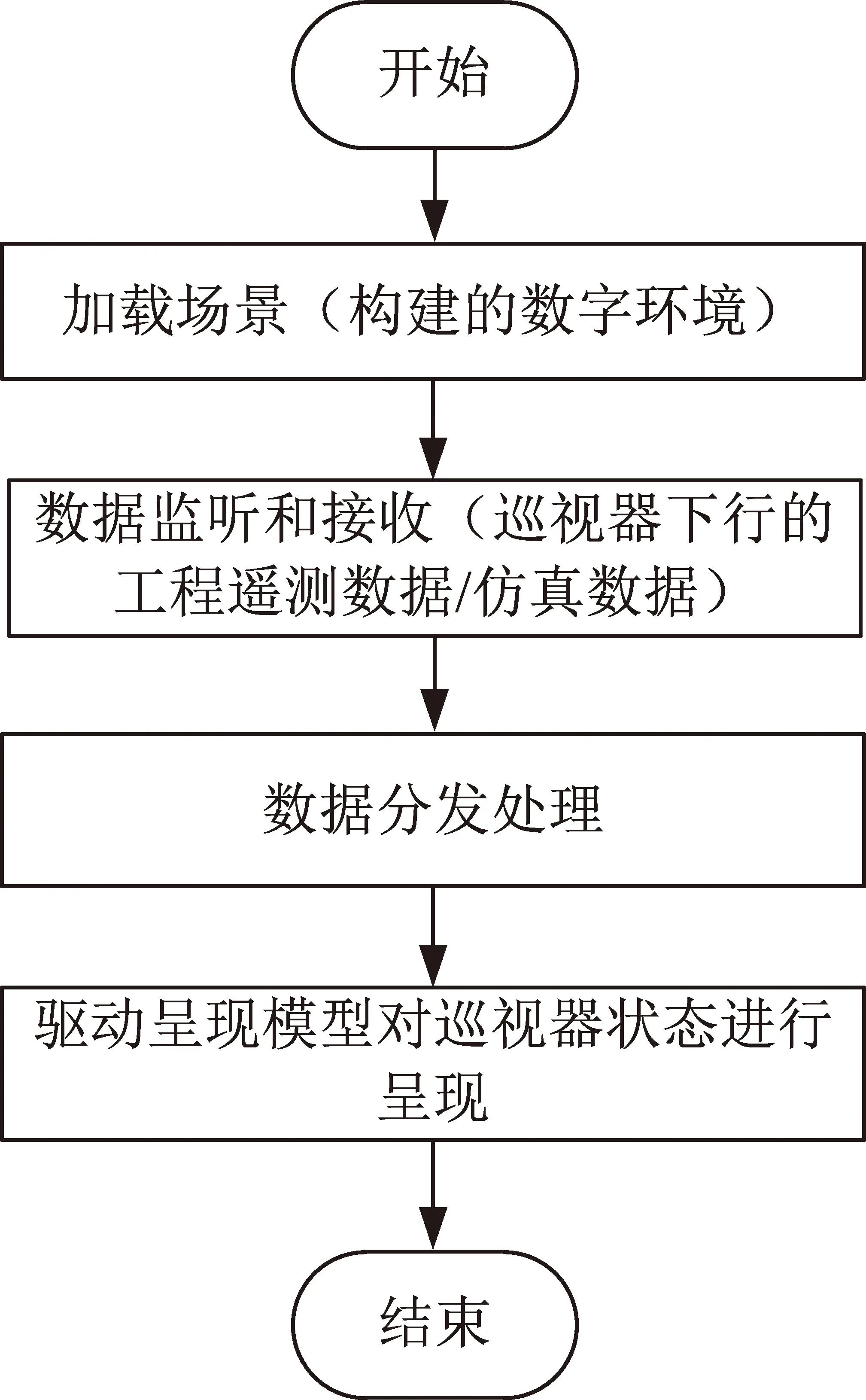
图22 多维可视化流程
图23是巡视器月面从LE00204点运行至LE00205点的呈现情况,由图23可见,巡视器运动起始点编号、当前目标点编号、当前巡视器位姿等数据被实时进行呈现,同时着陆器相对于巡视器的位姿关系,当前时刻的光照阴影,以及巡视器运行的车辙均能够被有效地呈现。
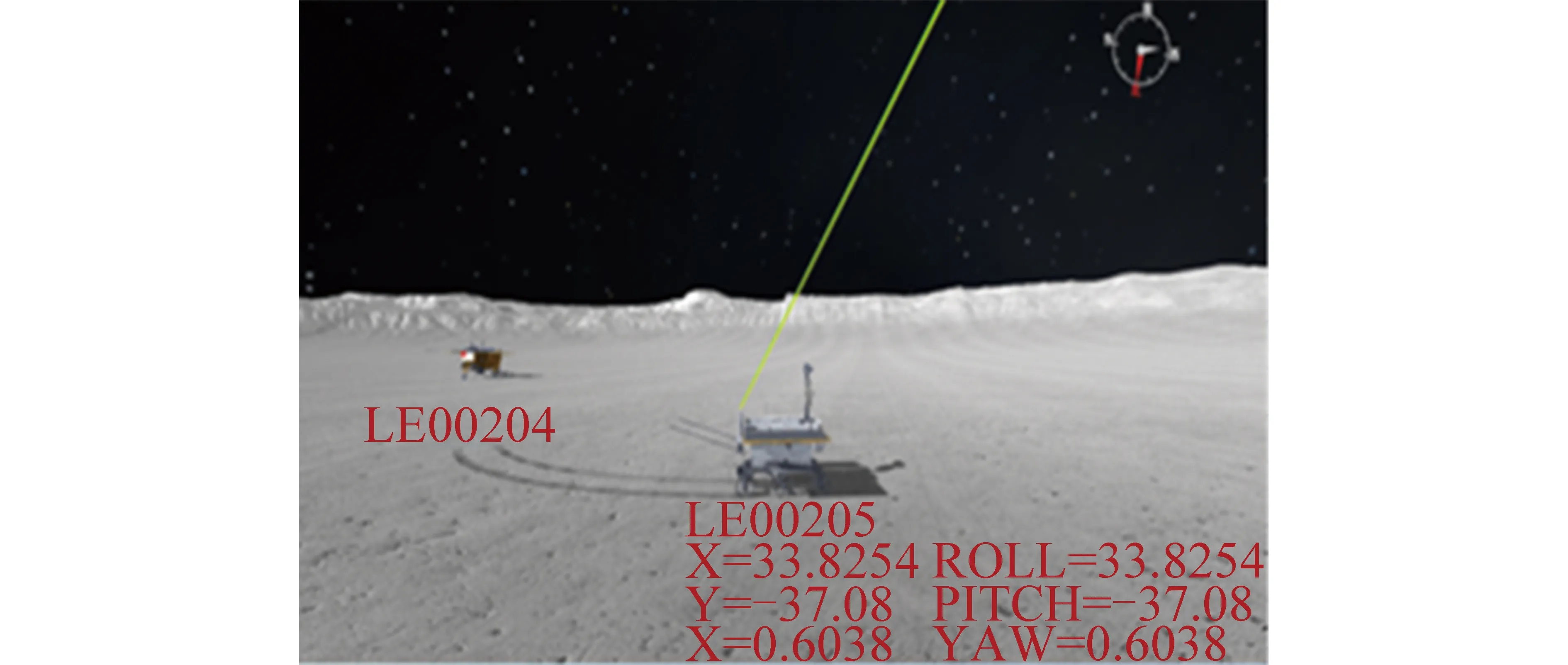
图23 多维呈现实例
3 在轨应用
2019年01月10日巡视器与着陆器分离后行驶到达A′点,对巡视器在A′的定位信息见表1。
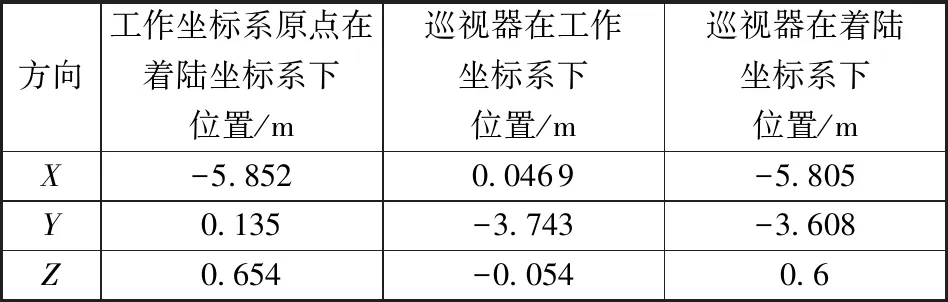
表1 A′点定位信息
在该位置下巡视器姿态为:滚动角-1.165°,俯仰角1.348°,偏航角-10.723°。巡视器在A′点进行了感知成像,进行全景拼接后如图24所示。
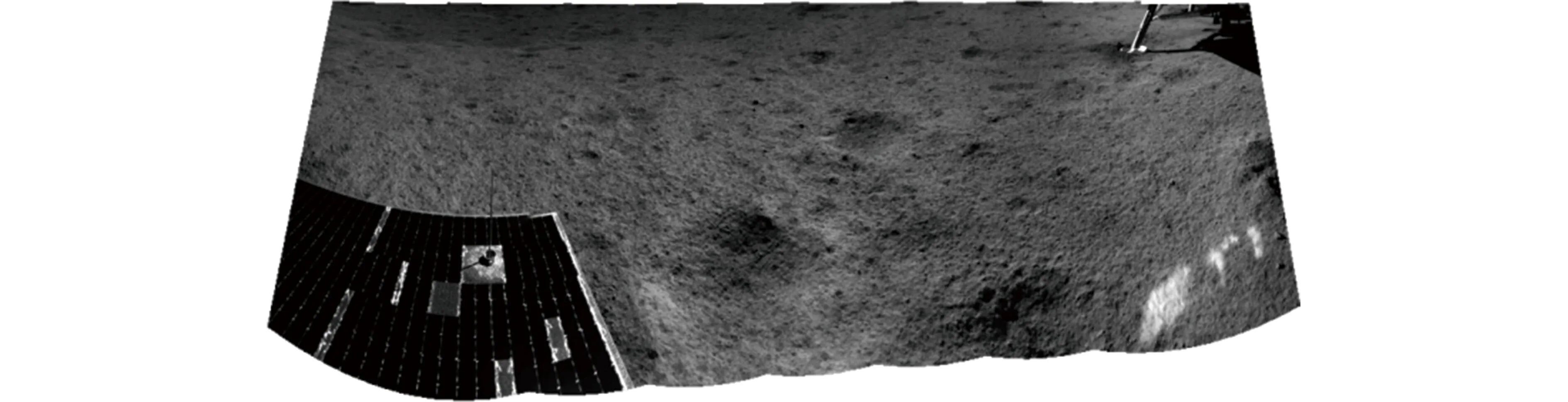
图24 A′点全景成像
进行数字环境构建,明确B′点目标位置相对着陆器坐标为(1.288,-6.635),巡视器目标偏航要求为2°(北东地坐标系)。开展了行走规划,行走策略见表2。
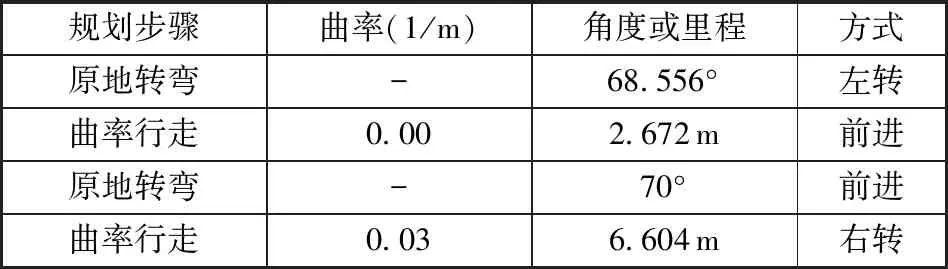
表2 A′行走至B′点规划
对行进规划进行仿真如图25所示,发现规划路径存在巡视器与着陆器距离过近容易产生碰撞风险。重新对规划结果进行调整后,再次进行数字仿真并通过了仿真。最终巡视器的行走路线如图26红线所示(仿真路线如图26绿线所示),巡视器安全到达目标B′点。
图25 行走仿真示意图
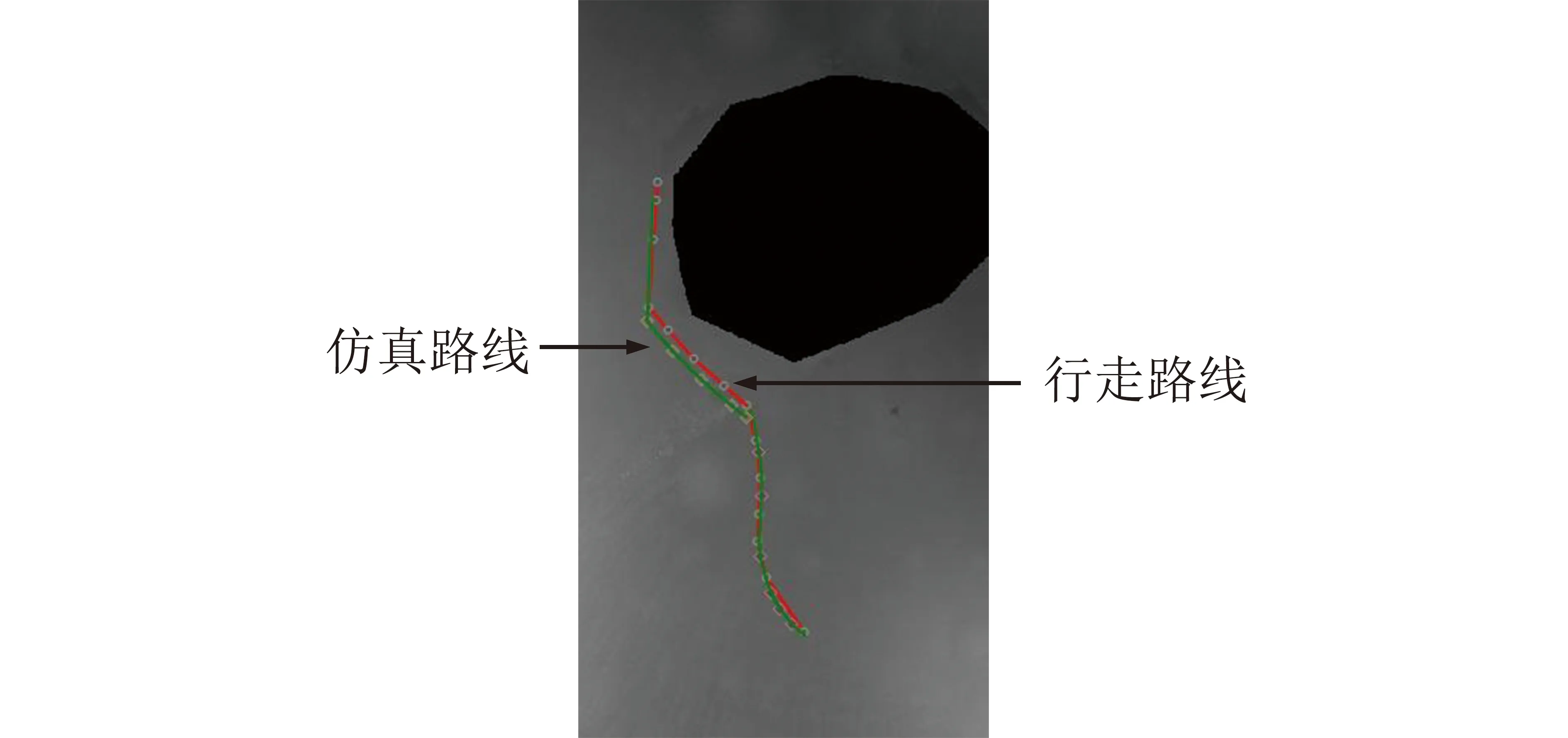
图26 实际行走路径
4 结束语
本文针对嫦娥四号巡视器月面工作特点,对地面支持系统进行了研究和设计,对各个模块的设计进行了介绍和说明,通过一个真实在轨应用,验证了设计的地面支持系统能够很好地支持巡视器月面巡视探测任务执行。目前,地面支持系统已完成既定的在轨支持任务,后续还将继续对巡视器的状态进行监视。系统中包含的物理仿真模块未在本次嫦娥四号巡视器月面工作任务中得到应用和检验,后续将持续对物理仿真模块进行维护和升级改造。