嫦娥四号探测器着陆区精确选择与评价系统设计
2019-11-11赵洋李飞吴波杨眉
赵洋 李飞 吴波 杨眉
(1 北京空间飞行器总体设计部,北京 100094)(2 香港理工大学地理信息学院,中国香港)
月球背面南极艾特肯盆地(South-Pole Aitken Basin,SPA)是太阳系中最古老、规模第二大的撞击盆地,具有极高的科学研究价值。由于艾特肯盆地位于月球背面,其特殊的空间位置,使其在地月系形成与演化研究、宇宙低频射电观测等方面具有月球正面所不可比拟的独特优势,是月球科学家梦寐以求的理想探测目标[1]。
而艾特肯盆地地形崎岖,遍布着大量的撞击坑和山峰,平均地势高差最大可达到15 km左右,月球探测器着陆安全面临着艰巨挑战。同时由于地势高差较大,导致着陆后可能存在对光照及于月球中继星的测控链路遮挡的风险,对月球探测器的月面可靠生存也产生了较大影响,因此选择能够保证着陆安全和可靠生存的着陆区至关重要。
本文根据当前有限的月球遥感探测数据,综合考虑地形坡度、撞击坑、石块分布以及地势遮挡等因素,结合模糊算法,建立了着陆区评价及筛选模糊模型(Landing Site Evaluation and Selection Based on Fuzzy Model, LESFM),在月球背面南极艾特肯盆地中筛选出了能够保障探测器着陆安全和可靠月面生存的着陆区。最后结合嫦娥四号探测器实际着陆区的环境比较分析结果,评价了着陆区精确选择方法的可行性。
1 嫦娥四号着陆区选择约束条件
1.1 科学探测需求约束
嫦娥四号任务的科学目标为:①低频射电天文观测与研究;②着陆区地质特征探测与研究;③月球背面月表环境探测与研究。SPA的范围是从月球的南极延伸到直径135 km的Aitken月坑,是太阳系中已经识别的规模第二大的撞击盆地,探测SPA盆地具有较高的科学价值和意义[2-5]。
深部月壳和月幔成分是当今月球科学研究的关键问题之一,对于了解月球形成初期的分异作用,探究月球的二分性(即月球正面和背面的地形地貌、结构、物质成分、月壳厚度的分布等具有的明显差异)的成因具有重要意义。但是,目前尚无法通过遥感手段直接获得准确的深部月壳和月幔的成分,也未采集到月球深部的岩石样品。SPA盆地是最有可能挖掘出月幔物质的盆地,其峰环、盆地内以及溅射毯的撞击熔融层及撞击熔融角砾岩都是很好的月幔物质取样区。虽然挖掘出的月幔物质可能被月壤及玄武岩覆盖,但后期形成的撞击坑又可重新将较新鲜的月幔物质暴露出来。因此,SPA盆地是探测和研究深部月壳及月幔物质的理想区域[6],如图1所示。
经过分析比较,SPA中的智海(Ingenii Basin)、阿波罗盆地(Apollo Basin)、冯·卡门撞击坑(Von Kármán)和克里蒂安(Christian)撞击坑存在较高的科学探测价值,可作为着陆区的候选区域。
1.2 工程约束分析
在满足科学探测需求,即位于SPA内的前提下,从工程可实现性角度选择着陆区,应遵循以下原则。
1)确保着陆、巡视移动过程安全
(1)目标着陆区地形平坦,大基线的坡度(水平方向距离1 km以上)。主要影响飞行过程安全性,如动力下降过程的控制、推进剂的消耗以及微波测距测速敏感器的回波强度。小基线的坡度(水平方向距离2~10 m)主要影响着陆器接触月球表面时的稳定性、着陆缓冲机构的缓冲能力、巡视器的越障能力等。因此,综合考虑到着陆及巡视、移动过程的安全性,要求着陆区的地形平均坡度不能大于5°。
(2)目标着陆区在轨道可达范围内。着陆器的动力下降采用的是98°倾角的轨道,在月球近月点附近,距月面15 km左右的位置上进行降轨着陆,因此需要考虑下降航迹覆盖的范围确定着陆区。同时考虑具备推迟一天着陆的故障应急处理能力,每推迟一天着陆,器下点向西变化约13°。
2)确保测控链路全时段可见
在SPA着陆区内,着陆器、巡视器的全向天线对月球中继星的前返向链路全时段可见,是保证着陆器、巡视器安全工作的前提。嫦娥四号中继卫星运行在位于地月L2平动点的Halo轨道,中继卫星轨道幅值:X向约±1.25×104km,Y向约±3.7×104km,Z向约±1.3×104km,星下点轨迹在月面覆盖范围为140°W~140°E,20°S~20°N。因此,根据中继星轨道设计的结果,为确保着陆器、巡视器对中继卫星全向的前、返向链路全时段可见,应选择着陆区尽量靠近经度180°E±19°范围内。
3)保证月面长期安全工作
充分考虑热控、电源的适应能力,确保可以长期工作,着陆区纬度应在40°S~55°S范围内。
根据上述筛选原则,在SPA中选择以纬度范围±0.5°,经度范围±1.2°的矩形区域为目标着陆区,考虑具备推迟一天着陆的在轨故障预案,选择经度方向间隔约13°的主备两个着陆区(分别位于冯·卡门撞击坑和克里蒂安撞击坑内),如图2所示,下面对遴选的着陆区进一步开展基于数字地形的数据进行详细建模分析,采用评价模型筛选出最终的目标着陆区。
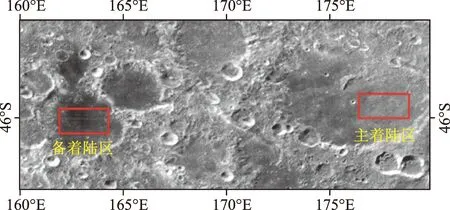
图2 主备着陆区选择示意图
2 月面数字模型
数字地形模型又称为数字高程模型(Digital Elevation Model, DEM),其主要原理是对通过摄影测量技术获得的大量的三维点,利用空间内插的方法得到DEM。
数字正射影像(Digital Orthophoto Map, DOM) 是对遥感影像进行数字微分纠正和镶嵌后的数字影像,它是同时具有地图几何精度和影像特征的图像。
NASA于2009年6月成功发射了月球勘测轨道器(Lunar Reconnaissance Orbiter, LRO)。LRO上载有一个激光测高仪(Lunar Orbiter Laser Altimeter, LOLA)、一台广角(Wide-Angle Camera, WAC)和一台窄角(Narrow-Angle Camera, NAC)两台数字相机,用来收集月球表面地形数据与影像数据[3]。LOLA数据是目前世界各国月球探测任务所获取的地形数据中精度最高,覆盖最密集的激光测高数据。LRO在月球正面的定轨精度达到了厘米级,因此相应地通过轨间交叉点平差处理后,LOLA数据的精度可以达到:在高程方向约为0.5 m,平面约为25 m的高精度。LRO的广角相机(WAC)和窄角相机(NAC)分别获取了空间分辨率为100 m和0.5 m的月球影像。LRO的LOLA激光测高数据和日本月亮女神影像测绘数据联合生成了目前精度最高的DEM模型,即SLDEM2015(SELENE-LRO Digital Elevation Model, release in 2015)。根据这一数据进行分析,月球背面南极艾特肯盆地内的DEM精度可达到50 m,DOM精度最高可以达到1 m[6]。
中国的嫦娥二号探测器于2010年完成了全月球详细测绘,主要采用2条线阵CCD的推扫式相机,根据所获取的图像,生成了月球背面南极艾特肯盆地内的DEM精度可达到50 m,DOM精度最高可以达到7 m[7]。
嫦娥四号任务所选的着陆区DEM模型如图3所示。
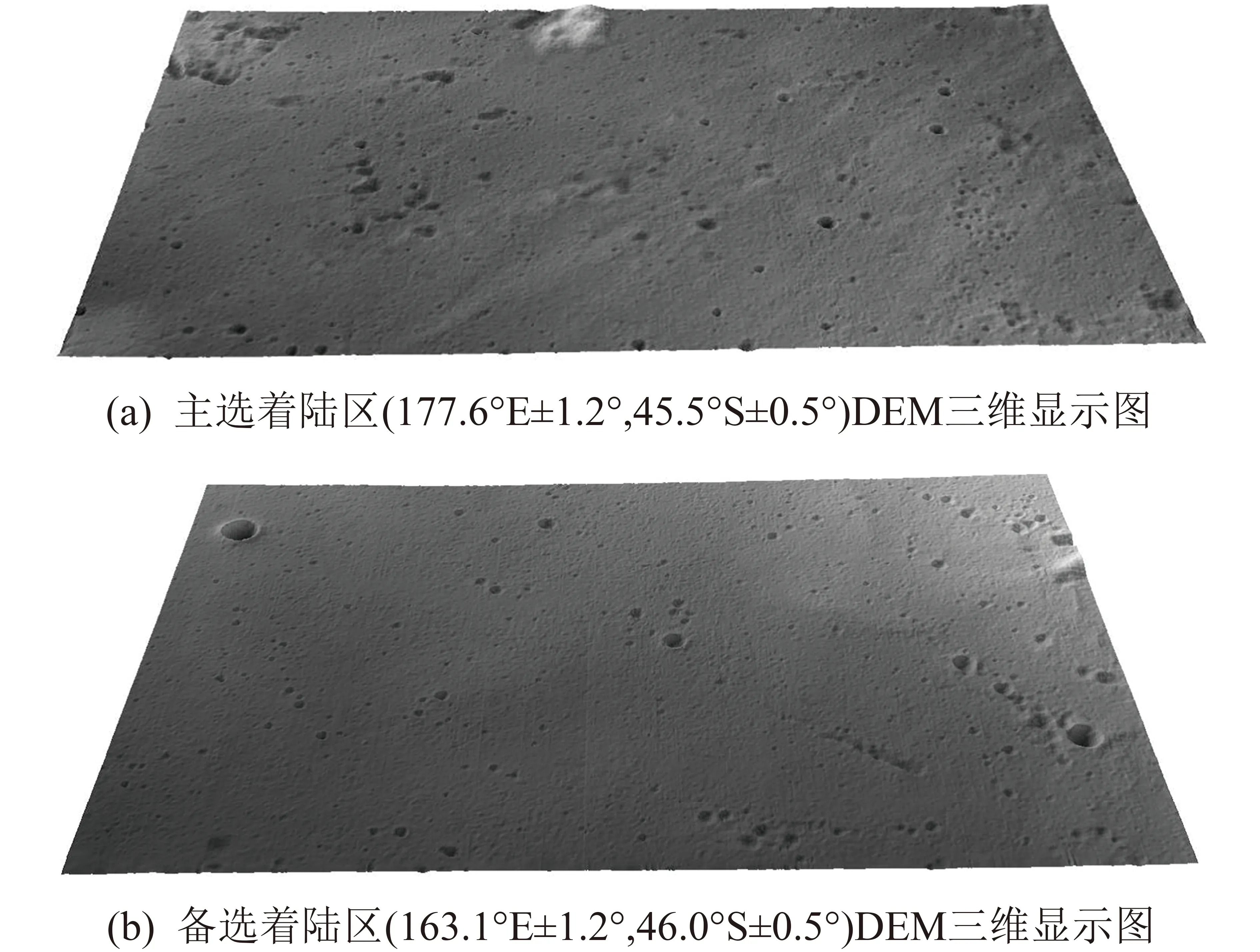
图3 SPA所选着陆区DEM三维显示图
3 嫦娥四号着陆区精确选择及评价系统设计
3.1 着陆区评价及筛选模型
为实现着陆区关键指标评价及快速筛选,基于模糊数学的方法,设计了LESFM模型,对着陆区选择的关键因素进行指标量化评估,即:通过对地形地貌、遮挡情况等关键因素指标进行分解和数学化处理,将筛选规则及约束条件用模糊集表示,并把这些模糊控制规则以及有关信息(如评价指标等)作为知识存入模糊控制器中,运用模糊推理方法,完成预选着陆区打分评价及最终筛选,主要包括:确定LESFM控制器输入、输出语言变量及赋值;确定模糊控制规则;模糊决策;模糊输出变量解模糊;加权阈值筛选及评价目标着陆区等几个步骤。
3.1.1 选定LESFM系统的输入、输出变量
由于本系统存在较多的模糊词来描述输入、输出变量,需要进行适量的选择,若选择维数过多,系统的规则响应复杂缓慢,维数较低,则系统会使得变量变得粗糙,导致系统性能变坏。
根据LESFM系统在本文中地形识别的应用需求、参考着陆区地形关键指标的要求,和成熟的模糊控制系统设计经验,将着陆区地形坡度(s)、撞击坑密度(c)、石块分布量(r)以及地形遮挡角(q)等关键因素作为输入变量,即选择LESFM系统的输入变量为:{s,c,r,q}。进一步,将输入变量进行模糊化处理,对应得到坡度、撞击坑密度、石块分布量、地形遮挡角等参数量化结果(无量纲)为:{S,C,R,Q}。按照模糊规则完成模糊决策,即经过模糊逻辑推理计算,输出评级决策后的结果U∈[0,100]。输出变量经过解模糊处理及各指标加权处理后,得到实际决策结果u。
在本文中,输出变量采用评级方式进行划分:u={A, B, C, D, E },即:u={最优∈[100, 80],次优∈(80,60],中∈(60,40],较差∈(40,20],最差∈(20,0]},如图4所示。

图4 基于LESFM模型评价及筛选地形过程示意图
3.1.2 LESFM的变量子集及隶属度函数确定
采用Mamdani模糊化方法,将输入精确量的波动区间映射到新的论域间,新的论域均由三个词集组成,即每个模糊变量对应各自的模糊子集,如,在对坡度变量s进行设置时,选择该参数对应的模糊子集为:s={Down,Even,Steep},分别代表:{低坡度(负),零,高坡度(正)}。
根据3.1.1节的设计,在各输入变量确定后,相应得到输入、输出变量及其模糊子集对应关系为:
确定模糊子集隶属度函数曲线形状,将确定的隶属度函数曲线离散化,得到有限个点上的隶属度,从而形成输入变量的模糊子集。本文在选择模糊输入变量的模糊隶属度函数时,采用分辨率较高的线性分布函数,选择模糊输出变量隶属度函数时,采用带宽较大的高斯分布函数。
3.1.3 制定LESFM模糊规则
模糊规则不同于传统的二值逻辑推理,是通过模拟人类推理思维,以模糊逻辑为基础,经过适当的模糊推理,是实现输入-输出变量映射关系的方法,也是一种基于知识库的不确定推理方法。模糊规则的制定过程就是建立模糊知识库的过程。通常模糊规则以实际的工程经验进行确定,控制规则数目要求能够完整覆盖输入-输出变量,同时要适当精简,并能够反映被控对象的特性。因此,本文的模糊控制规则选择工程应用经验最丰富的Mamdani方法进行模糊推理。对应的模糊规则如图5所示。
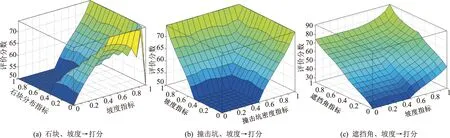
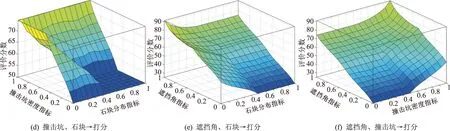
图5 模糊规则设计
3.2 基于模糊模型的着陆区评估及精确筛选
基于LESFM的着陆区评估及筛选方法主要包括目标着陆区详细划分、LESFM建模及计算、着陆区评估及筛选3个步骤。
3.2.1 着陆区划分
按照1.2节的工程约束条件,以主着陆区为例,在着陆区从左上角点(176.4°E, 45°S)起,自西向东,以2 km为步长,以着陆轨道倾角为矩形区域的倾斜角,对着陆区进行划分,共获得了25个10 km×30 km的子区域,各子区域编号从西至东依次按顺序标记为S1~S25,如图6所示。
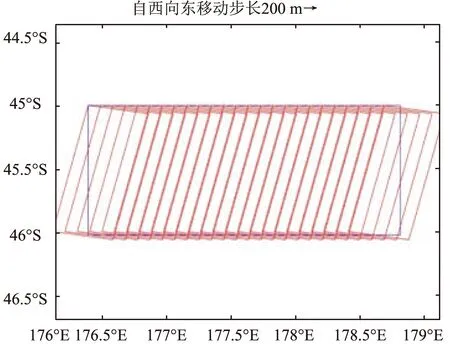
图6 着陆区(主)目标区域详细划分
3.2.2 着陆区地形统计分析及LESFM建模
1)着陆区坡度分布统计情况
根据主着陆区SLDEM2015的DEM数据,生成坡度统计结果(最大值、平均值、标准差,最小值为0)如图7所示。
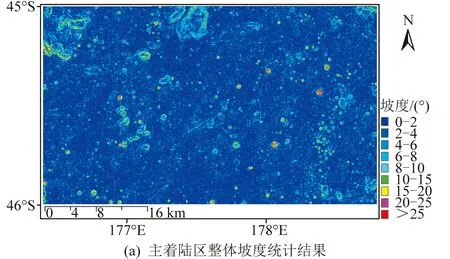
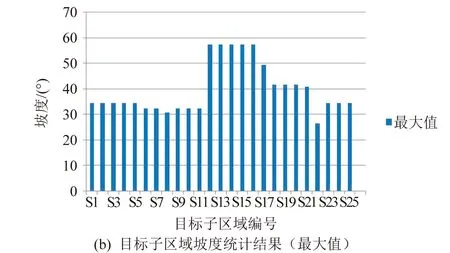
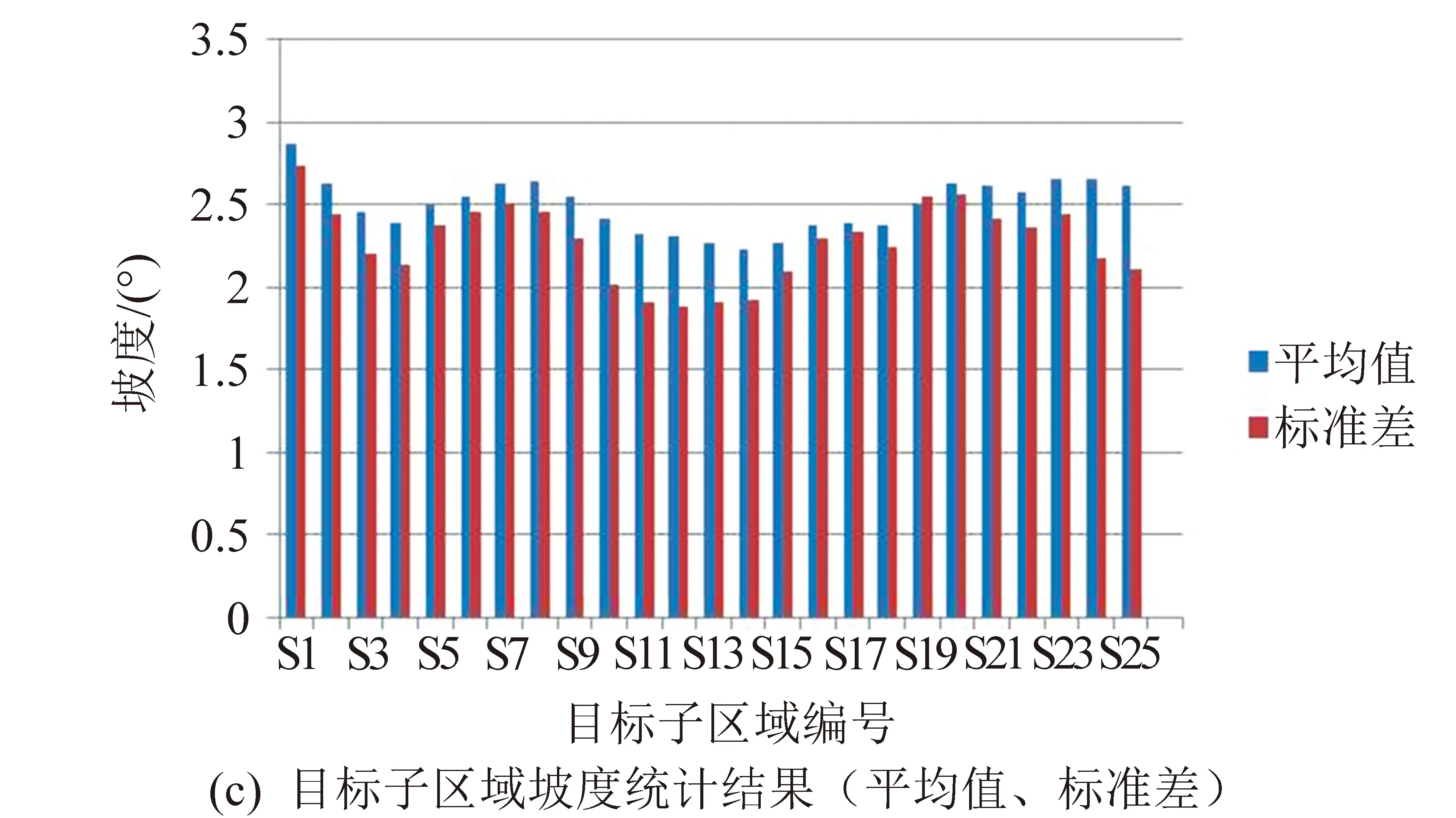
图7 主着陆区坡度统计结果
2)着陆区撞击坑密度统计情况
根据主着陆区LRO NAC成像生成的1 m分辨率的DOM数据,采用机器学习方法提取撞击坑,再经过人工筛查,得到了撞击坑分布统计结果(每10 km2面积内撞击坑最大值、最小值、平均值、标准差)如图8所示,提取的撞击坑直径范围14~1581 m。
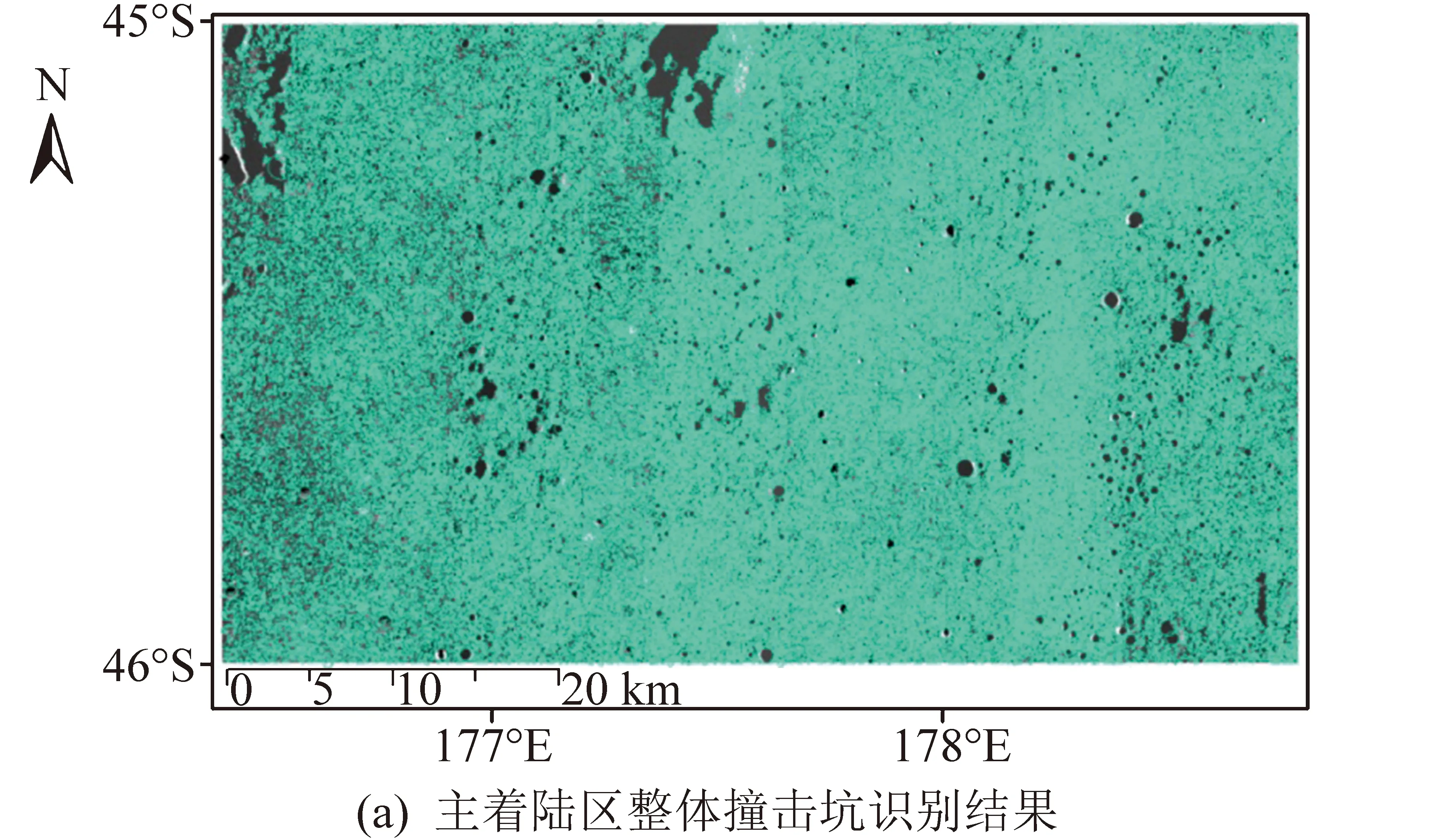

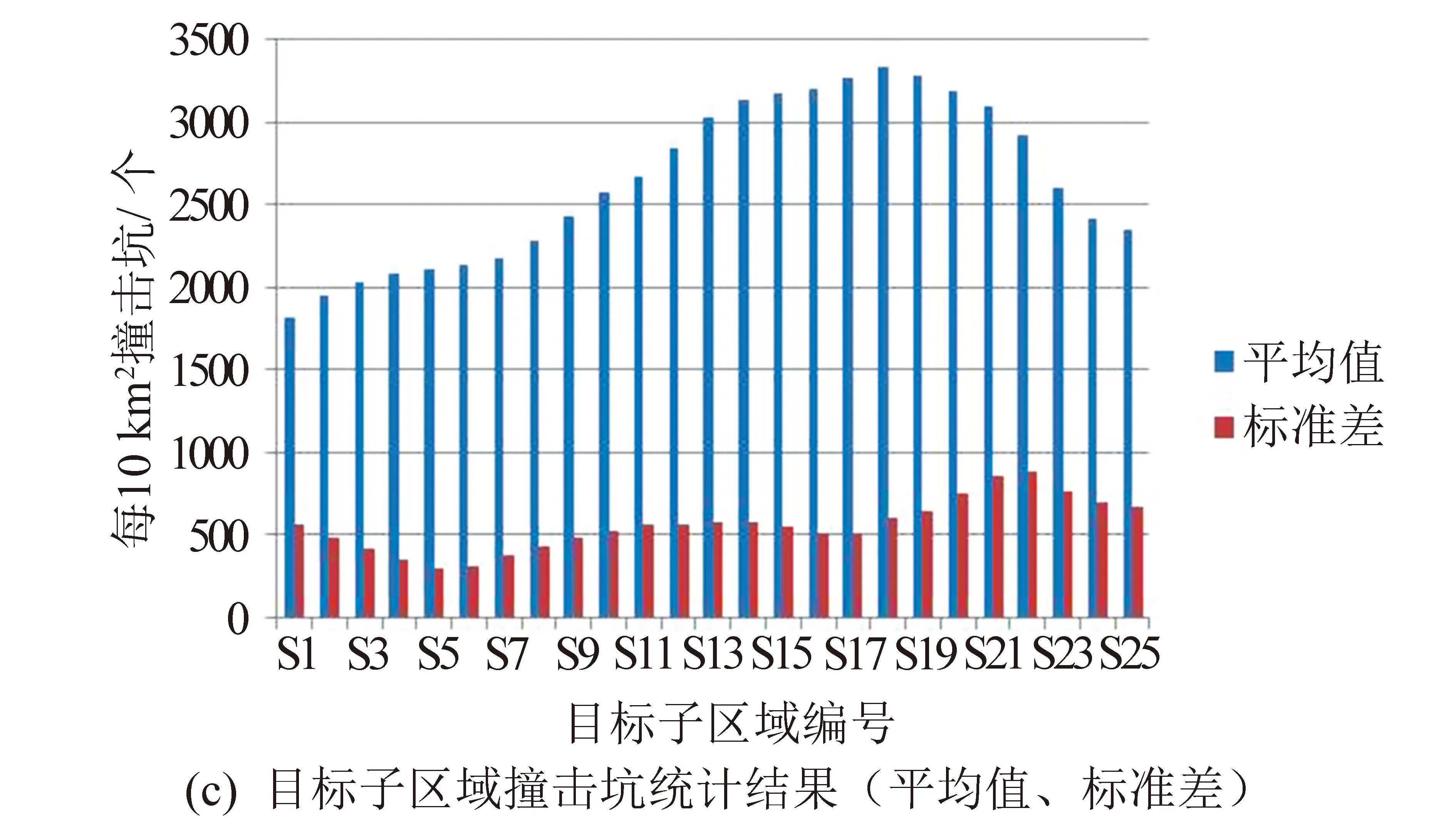
图8 主着陆区撞击坑统计结果
3)着陆区石块丰度统计情况
根据主着陆区LRO NAC成像生成的1 m分辨率的DOM数据,采用机器学习方法提取石块,再经过人工筛查,得到了石块分布统计结果(每10 m×100 m区域内石块数量最大值、平均值、标准差,最小值为0)如图9所示,提取的石块直径范围1.23~32.52 m。再根据石块数量,得到各子区域单位面积上石块数量的石块丰度:丰度=石块总数/子区域面积×100%。
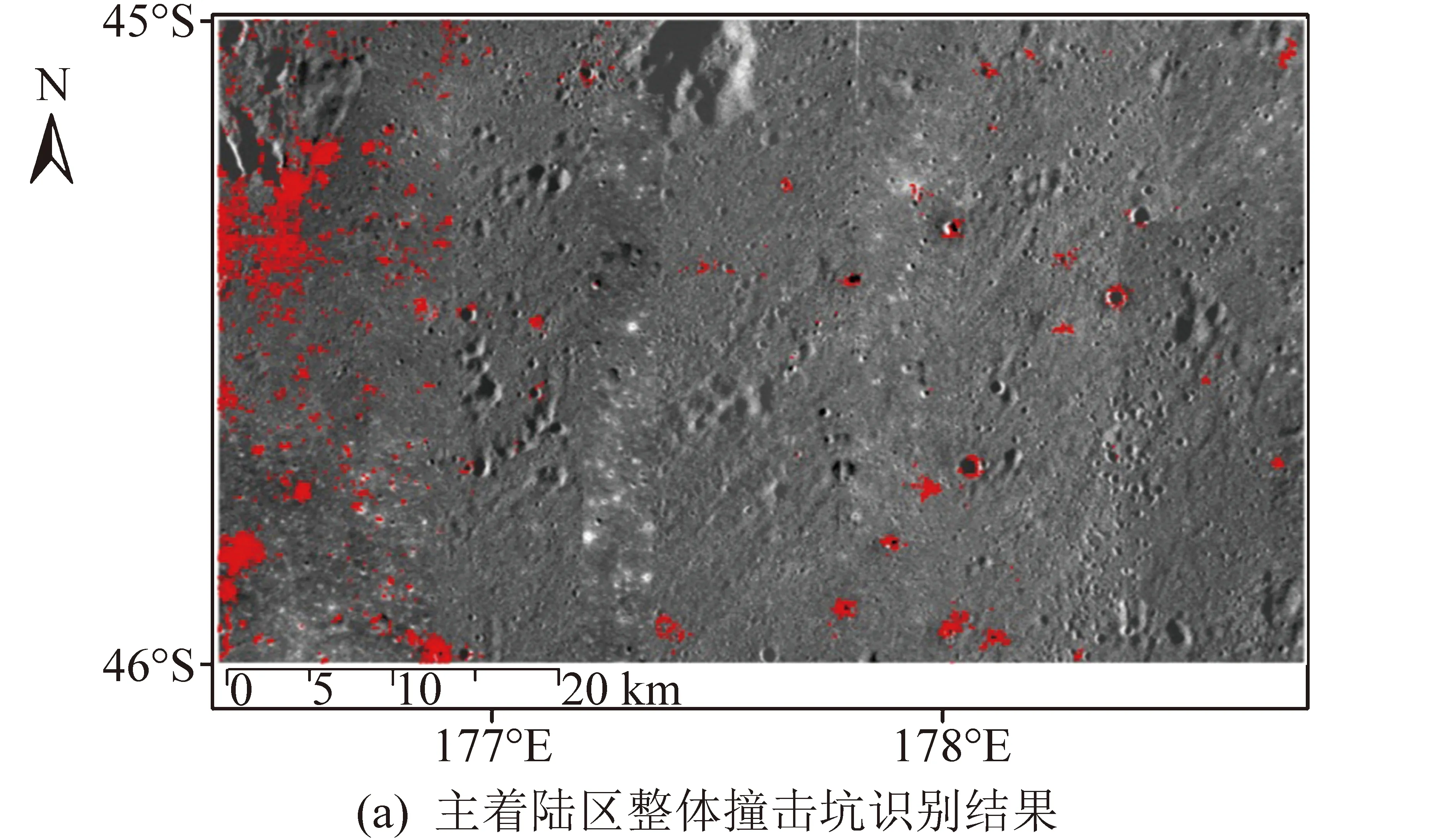
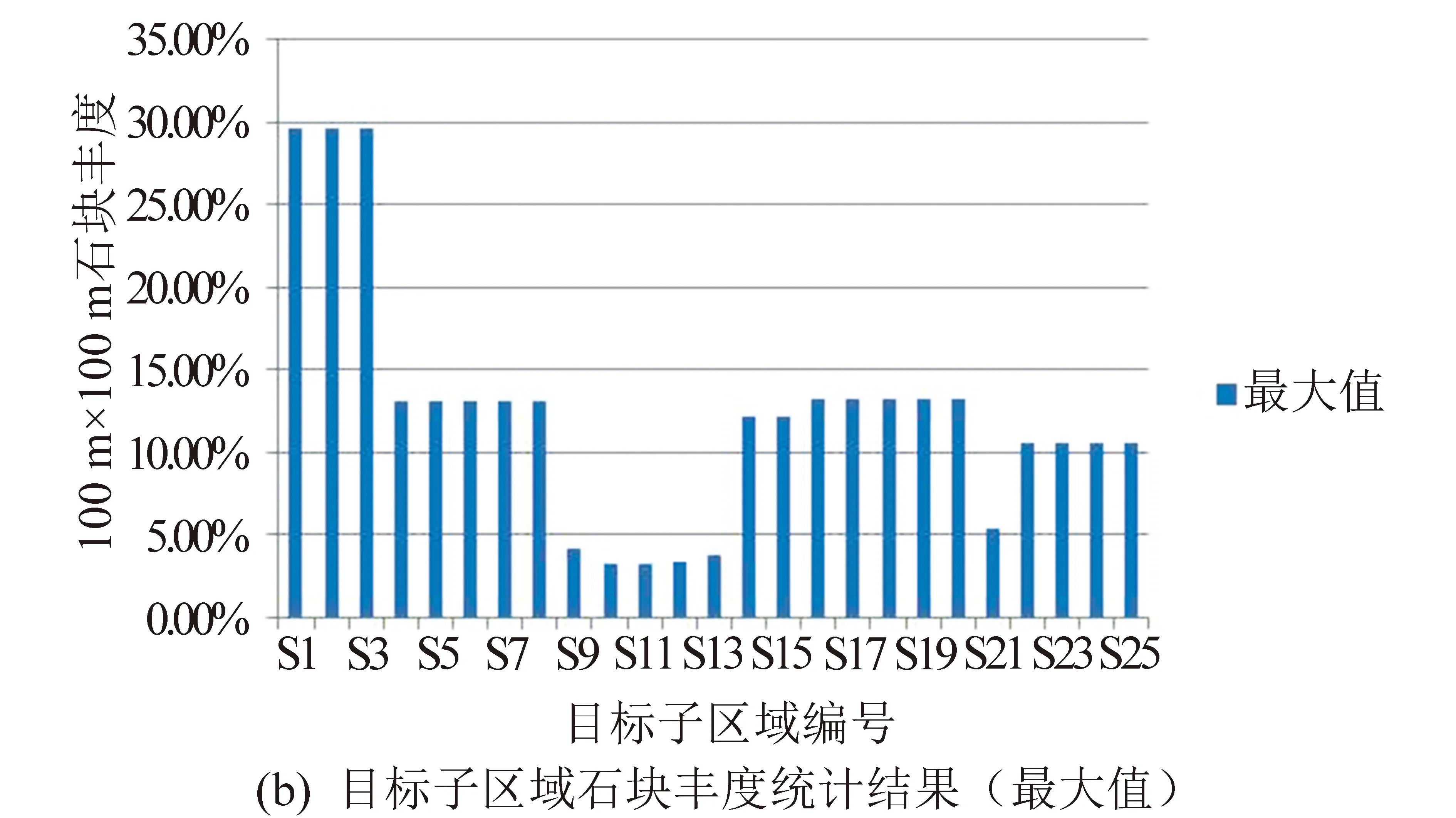
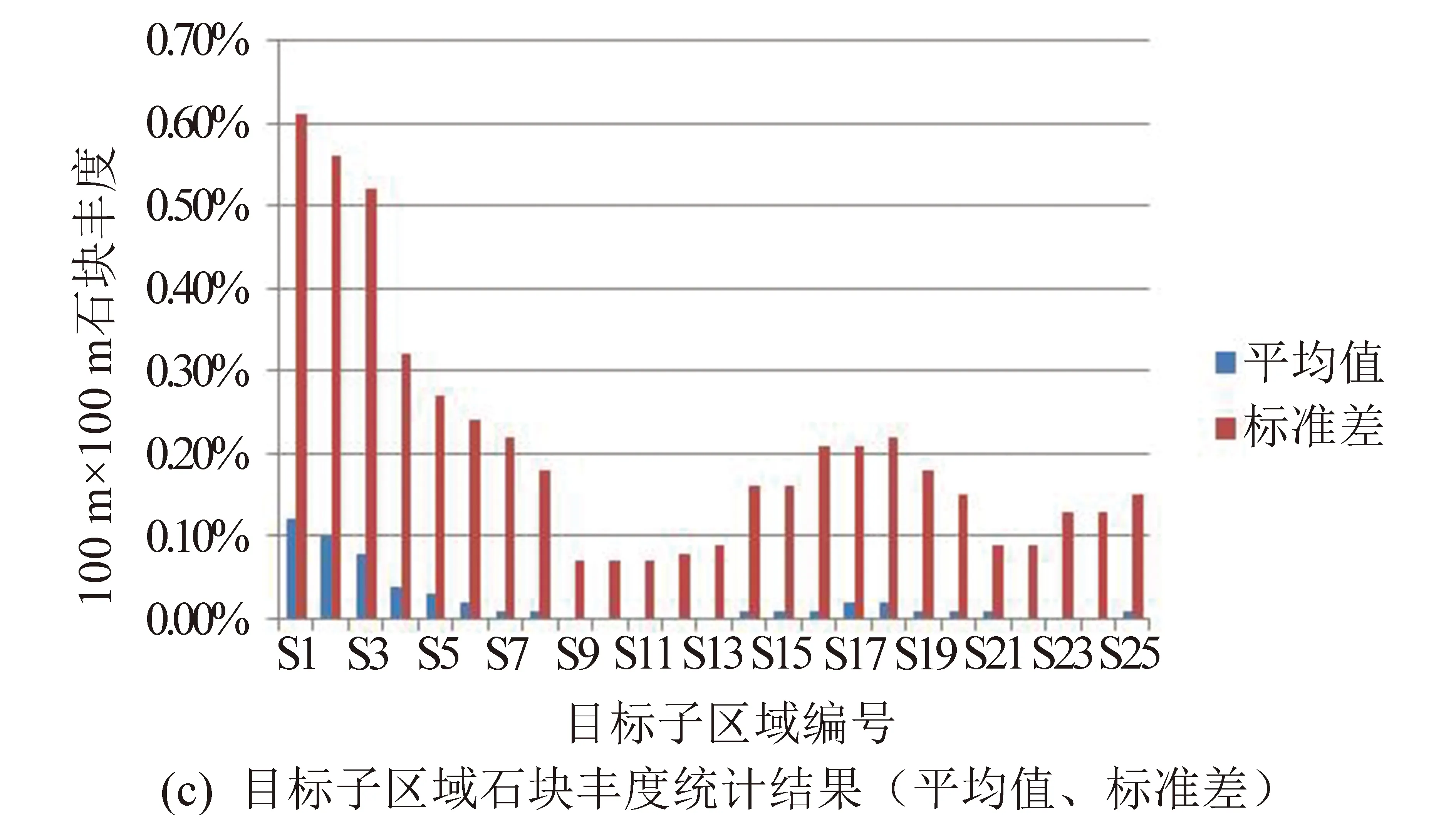
图9 主着陆区石块统计结果
4)着陆区光照遮挡统计情况
根据主着陆区SLDEM2015的DEM数据,计算各特征点360°范围内最大遮挡角,再结合太阳星历,统计各特征点太阳高度角低于地形遮挡的方位个数,得到光照遮挡统计结果(太阳通视遮挡方位个数最大值、平均值、标准差,最小值为0)如图10所示。
5)着陆区地形统计分析结果统计
根据对坡度、撞击坑密度、石块丰度、光照遮挡情况进行统计,可以得到25个子区域中:
(1)坡度范围为0°~58°,平均坡度范围为2.2°~2.9°,标准差范围为1.8°~2.8°;
(2)撞击坑数量范围为84~5060个,平均数量为1819~3328个,标准差范围为307~883个;
(3)石块丰度值范围为0~29.7%,平均丰度值为0~0.12%,标准差范围为0.07%~0.61%;
(4)光照遮挡方位数量范围为0~114个,平均遮挡方位数量为0.01~0.1,标准差为0.33~1.47。
3.2.3 基于LESFM的着陆区评估及筛选
按照3.1节对LESFM模型建模的描述,首先分别对3.2.2节统计的坡度、撞击坑密度、石块丰度、光照遮挡方位个数进行归一化处理。经过LESFM模型计算输出各子区域分级。如表 1所示。
根据LESFM系统的评分及筛选结果,可以确定在SPA区域内,中心经度176.5°E~176.9°E、177.3°E~177.6°E范围内均为理想的着陆区域,根据地形分析的结果,在这些区域范围内,坡度范围在0°~35°,平均坡度在2.2°~2.5°范围内;撞击坑数量在84~3500个左右,平均数量≤2500个;石块丰度范围在0~6%范围内,平均丰度≤0.01%;出现光照遮挡的方位数量范围在0~40个,平均遮挡方位数量在0.01~0.05个。说明系统精选出的区域坡度较为平坦、撞击坑密度较低且分布较为集中、石块丰度较低、光照遮挡出现概率较低,是非常理想的着陆区。
采用同样的方法,在备选着陆区,可以确定出中心经度162.4°E~163.5°E的范围内是较为理想的着陆区。而在嫦娥四号月面着陆的任务中,只有在动力下降前发生故障,导致未着陆在主着陆区时,才会采用备份着陆区,于第二天着陆在此区域[2]。
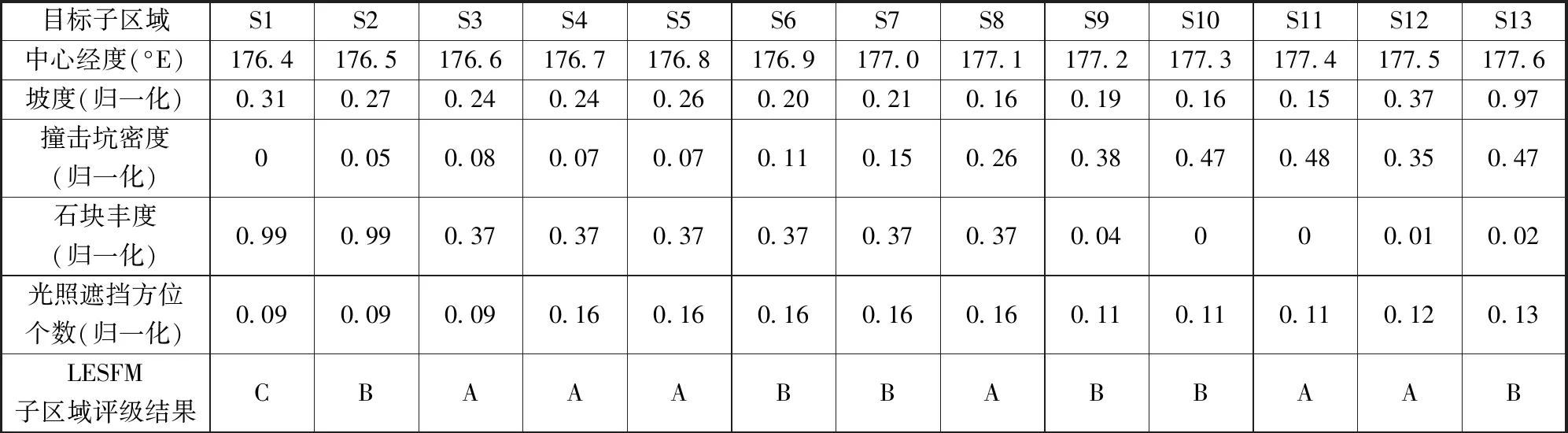
表1 主着陆区的子区域地形指标参数
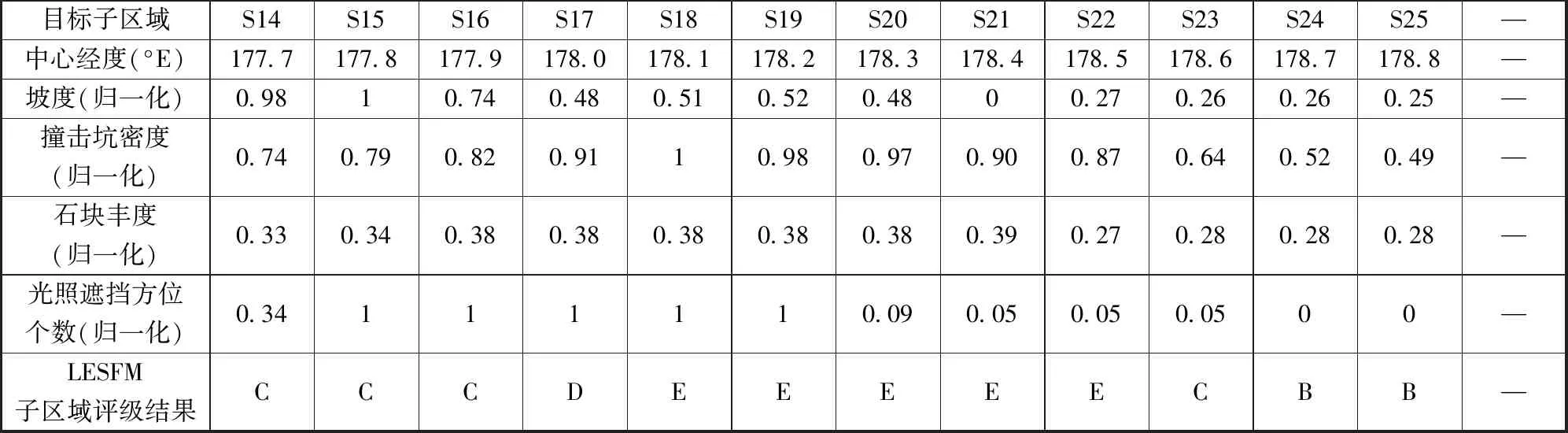
续 表
3.3 嫦娥四号探测器实际着陆区地形环境
嫦娥四号探测器于2019年1月3日10时14分35秒,开始在预定的动力下降点点火。经过了约680 s的点火时间,嫦娥四号探测器最终着陆在月面177.589°E,45.456°S的位置,着陆点高度为海拔-5926 m。
结合DEM数据分析结果,探测器动力下降航迹下的月面地形高程变化情况如图11所示,可以看出当地的地势条件十分崎岖,根据测算,该着陆点所在区域坡度≤5°[8-10]。根据着陆器降落相机在动力下降过程对月成像及着陆月面后,第一个月昼地形地貌相机环拍的成像结果,可以看出在着陆点附近区域有4个直径在15~30 m的撞击坑(如图12中描红的圆圈),大的撞击坑内遍布小撞击坑,根据统计计算,在单位面积内撞击坑数量≤600;着陆点附近的石块丰度接近于0%,石块主要遍布在几个较大的撞击坑坑壁周围,距离着陆点较远;此外,根据太阳星历和着陆点附近地形遮挡角的关系,分析出着陆点周边地形对太阳光照不存在遮挡,如图13所示[8-10]。
综上,着陆点的关键地形指标详见表 2,与在着陆区精确选择的工作中所分析出的结果一致,着陆区附近的地形环境能够满足安全着陆、巡视及生存的要求,可以采用本文涉及的方法对着陆区进行精确选择。

表2 嫦娥四号着陆点附近的地形参数
4 结束语
嫦娥四号探测器成功实现了全人类首次在月球背面软着陆的任务。在任务设计阶段,根据科学探测需求和工程约束条件,选出了南极艾特肯盆地的冯·卡门撞击坑和克里蒂安撞击坑分别作为主选着陆区和备选着陆区。结合现有的着陆区数字地形数据,进一步对着陆区进行详细划分,结合地形地貌进行分析,包括着陆区内坡度、撞击坑分布、石块丰度及地形对光照遮挡情况等,确定了着陆区的评价及筛选标准,并结合模糊数学推理算法,对各子区域进行详细打分评估,筛选出了更精确的着陆范围。
嫦娥四号任务成功着陆在既定的着陆区,根据所拍摄的图像及测量数据,分析出该着陆区内的地形地貌环境与分析的结果一致,表明着陆区地形评价及筛选的方法有效,可以将这一成功经验充分应用到后续地外天体软着陆探测任务中。