嫦娥四号巡视器系统设计与验证
2019-11-11党兆龙李海飞彭松温博申振荣贾阳
党兆龙 李海飞 彭松 温博 申振荣 贾阳
(北京空间飞行器总体设计部,北京 100094)
巡视探测是开展月球表面探测活动的主要方式,苏联在20世纪70年代利用月球车1号和2号[1]成功进行了巡视探测,获得了月面地形地貌、月壤力学特性等科学数据。美国在阿波罗15、16和17号飞船中利用载人月球车[2-3]辅助航天员进行月面活动,显著扩大了航天员的活动范围。2013年嫦娥三号巡视器与着陆器在月面成功进行两器互拍,嫦娥三号任务取得圆满成功,标志着我国探月工程第二步战略目前全面实现[4-7]。嫦娥四号探测器于2019年1月3日成功着陆在月球背面南极艾特肯盆地的冯卡门撞击坑,完成了着陆器与巡视器的互相拍照,任务取得了圆满成功。
嫦娥四号巡视器继承自嫦娥三号巡视器,借鉴了嫦娥三号巡视器的设计和地面验证经验[8-9],同时在研制过程中针对嫦娥四号在月背无法与地面直接通信、月背地形崎岖和遮挡等技术特点开展了设计验证工作,如中继链路双向捕获跟踪和信息传输可靠性验证、针对嫦娥三号巡视器在轨问题完善设计的系统级验证、巡视器驶离性能验证和月面移动性能验证等项目。本文分析了嫦娥四号巡视器技术特点和相对嫦娥三号巡视器方案的区别,论述了嫦娥四号巡视器基于新技术特点的设计方案及地面验证方法,可为后续巡视器系统设计和验证提供参考。
1 嫦娥四号巡视器的技术特点
嫦娥四号探测器系统包括着陆器、巡视器和中继卫星,分两次发射。第一次,中继卫星单独发射,进入地月系L2平动点使命轨道;第二次,着陆器和巡视器组合体一起共同发射,着陆到月球背面南极艾特肯盆地,在中继卫星中继链路的支持下,开展月面原位和巡视探测。
嫦娥四号巡视器的主要技术特点如下。
1)无法与地面直接通信
需要依靠中继卫星“鹊桥”实现巡视器与地面站的通信。由于测控数传产品已于2013年作为嫦娥三号的备份完成了研制,因此嫦娥四号任务中继链路的设计基于嫦娥三号原有硬件基础,尽可能不改变着陆器/巡视器原有射频链路状态,中继卫星可视为位于L2点平动点轨道简化的地球测控站和应用数据接收站。为了保证着陆器对中继卫星的指向,要求中继卫星在使命轨道运行过程中,应处于着陆器全向天线和定向天线的指向范围内,由此确定了中继卫星轨道范围。而巡视器是在着陆月面后加电工作,且全向天线为半空间覆盖,定向天线在地面控制下指向中继卫星,可适应中继卫星轨道的变化。
2)“中继”引起的机构控制结果延时反馈
对于巡视器的桅杆、太阳翼和移动等机构控制而言容易造成机构安全性问题。一般来说地面发送一条指令并完成执行结果判断需要3~4 min,这给巡视器的桅杆、太阳翼和移动装置等机构控制带来了新的挑战,一旦机构运动过程中发生故障,地面无法及时判断和处置,可能会造成机构故障的扩散,甚至造成巡视任务的失败。
3)月背崎岖地形
月球背面的崎岖地形会对巡视器的释放分离过程和月面移动过程产生严重影响。着陆区的地形对着陆器的着陆姿态产生影响,接着会影响转移机构悬梯在运动过程中的姿态,进而影响巡视器驶离过程的安全性;同时,月背崎岖的地形对巡视器在月面移动过程中移动电机的电流产生影响,甚至会造成移动电机损坏。
4)月背地形遮挡
嫦娥四号着陆点位于月球背面南极艾特肯盆地撞击坑内,可能存在周围地形对巡视器光照和测控的遮挡。光照遮挡对巡视器的能源和热控有重要影响,一旦发生遮挡就需要地面尽快处理;测控天线遮挡时器上无遥测返回、地面指令无法上行,在特殊时段热控、休眠唤醒等关键环节会危及巡视器安全。所以地形遮挡给自主热控、休眠唤醒带来了新的任务需求。
2 嫦娥四号巡视器总体方案
嫦娥四号巡视器的总体方案继承了嫦娥三号巡视器的方案,也是分为移动、结构与机构、制导导航与控制(GNC)、综合电子、电源、热控、测控数传和有效载荷共8个分系统。巡视器的构型仍为箱板式结构,巡视器移动状态的构型如图1所示。
根据嫦娥四号巡视器的技术特点开展了总体方案设计,嫦娥三号巡视器的热控、电源、结构与机构等多数分系统不需要进行修改,即可满足嫦娥四号巡视器的任务需求。主要改进内容如下。
1)中继链路设计
由于中继卫星相比地面测控站功率资源紧张,天线口径相对较小,实现巡视器与中继卫星之间最远8万千米距离下通信的需求,会花费较大的代价。而嫦娥三号巡视器测控数传分系统正样产品的实测值较指标要求还有一定余量,把该部分余量折算到指标中,可以在一定程度上降低中继卫星的设计难度和代价,因此根据嫦娥三号正样产品的实测值提高了嫦娥四号产品指标,涉及全向接收天线增益、全向发射天线增益、应答机接收灵敏度等,同时还更改了遥控码速率和数传码速率。
2)嫦娥三号巡视器月面问题的设计改进
嫦娥三号巡视器月面问题的解决措施主要有移动分系统的电缆防护、综合电子单元驱动控制等,均在嫦娥四号巡视器中落实到位。
3)任务需求引起的设备调整
取消了有效载荷分系统的粒子激发X射线谱仪,相应的也就取消了辅助该设备展开的机械臂,由此带来的设备布置、电连接器设置等也都进行了调整。增加了一台瑞典研制的中性原子探测仪,相应增加了安装接口和热控措施等。
4)系统层面上加强了安全操控设计
针对嫦娥四号巡视器所面临的控制结果延时、月背地形崎岖和遮挡等特点,分解出机构安全控制、可靠释放分离、安全移动、自主热控等设计需求,并基于嫦娥三号巡视器现有的设计方案,分别从器上和地面两种途径进行改进实现。
(1)对于机构安全控制,采用器上机构多参数控制和地面指令链控制来实现。嫦娥三号巡视器的太阳翼、桅杆等机构使用位置闭环控制方式。在机构旋变发生故障时,机构无法正常停止转动。对于嫦娥四号巡视器任务而言,机构控制的时延会造成地面无法发送停止转动指令及时干预,可能导致机构连续转动而造成机构损坏,因此增加了时间参数控制。地面指令链控制中增加了机构运动范围,如桅杆偏航从一端运动至另一端改为两端向中间运动,保证即使位置旋变发生故障,桅杆偏航也不会超过允许的转动范围。
(2)对于可靠释放分离,采用多方向自主驶离、安全驶离策略来实现。自主驶离方向在嫦娥三号巡视器的直行不避障和直行右转避障基础上,增加了直行左转避障,增强了适应复杂地形的能力。安全驶离策略制定时考虑了着陆器姿态、着陆器对巡视器的测控遮挡等因素。
(3)对于安全移动,采用器上移动电机电流监测、地面多重停车保护来实现。巡视器移动时越障可能导致移动电机堵转,导致电流异常增大。通过设计移动电机电流监测功能,当电流增加达到一定阈值时,器上会自主发送移动电机断电指令,等待地面处置。地面多重停车保护是在移动指令中,每间隔一定时间发出整器停车指令,确保巡视器可靠地停止运动。
(4)对于自主热控,采用器上流体回路控制阀自主控制来实现。月背的地形遮挡可能会造成测控中断,为此器上设计了流体回路控制阀自主通断的自主热控能力,将车体尾部的同位素热源的热量及时引入到舱内,调节整器舱内设备温度。
3 巡视器技术方案的地面试验验证
嫦娥四号巡视器在研制过程中,对嫦娥四号巡视器的技术方案进行了全面充分的试验验证,其中除综合测试、力学、热真空等例行大型试验和专项试验外,还针对嫦娥四号相对于嫦娥三号的技术改进开展了:中继双向捕获跟踪和信息传输可靠性验证、嫦娥三号巡视器月面问题解决措施的验证、驶离性能验证和月面移动性能验证等系统级专项试验。
3.1 中继双向捕获跟踪和信息传输可靠性验证
巡视器与中继卫星的中继双向捕获跟踪和信息传输可靠性验证试验的目的是检验接口设计的正确性,分别开展了中继通信接口联试、“两器一星”联合测试分系统级和中继链路在轨测试等工作。
(1)中继通信接口联试利用巡视器测控数传鉴定件与中继卫星进行,包括前向链路射频接口和数据接口测试、返向链路射频接口和数据接口测试、校时测试等,联试结果均满足接口控制文件要求。
(2)“两器一星”联合测试为嫦娥四号着陆器、巡视器和中继卫星正样器(星)进行测试,检查中继链路接口的正确性和匹配性以及与中继链路有关的飞行程序设计的合理性和正确性。测试分为无线和有效两种方式,联试结果均满足接口控制文件要求。
(3)中继链路在轨测试采用在轨中继卫星,着陆器和巡视器采用与飞行产品技术状态一致的中继相关(两器测控数传分系统、着陆器数管分系统和巡视器综合电子分系统)器上设备,以及地面转发设备完成中继链路的关键功能和性能指标的测试。验证中继卫星中继链路相关设备在经过发射、地月转移及近月制动等阶段进入在轨工作空间环境后,前向链路和返向链路的关键功能和性能指标是否正常。
测试结果表明中继卫星与巡视器之间的中继通信接口符合设计要求。
3.2 嫦娥三号巡视器月面问题解决措施的系统级验证
嫦娥三号巡视器月面问题解决措施的系统级验证的试验项目:①移动装置与综合电子单元在故障情况下的接口匹配性以及移动性能;②移动装置短路下的局部电性能测试和移动性能测试。
机构短路故障模拟状态下的电性能测试时移动装置停放在支架车上,车轮处于离地状态,利用转接盒进行短路模拟,测试故障情况下综合电子单元的控制与驱动组件对移动装置的控制能力。特定故障情况下的移动性能测试,分为单轮和双轮两种情况,测试时车轮处于模拟月壤上,移动装置搭载模拟车身,测试越障、机动、爬坡等性能。
整个系统级验证覆盖了移动装置驱动组件的霍尔回路、旋变和电机的故障模式,结果表明解决措施有效,故障情况未扩散,在故障情况下仍可确保巡视器具有一定的移动能力。
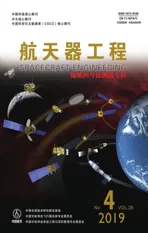
3.3 巡视器驶离性能的地面验证
驶离性能验证的目的是验证巡视器与着陆器释放分离过程中在转移机构悬梯上的稳定性和移动性能。试验设备布置如图2所示。对于月球和火星的巡视器地面试验方法,通常采用的方法是采用低重力模拟装置进行巡视器整器的减重,然后根据悬架特点进行配重,从而实现车轮所受的载荷与月面或火面的载荷保持一致[10-12]。整器低重力模拟装置采用平行吊架与巡视器相连,具有跟随巡视器移动的能力,提供巡视器地球重力的5/6的拉力,使巡视器各个车轮所承受的垂直载荷与巡视器在月面移动时的数值相近。
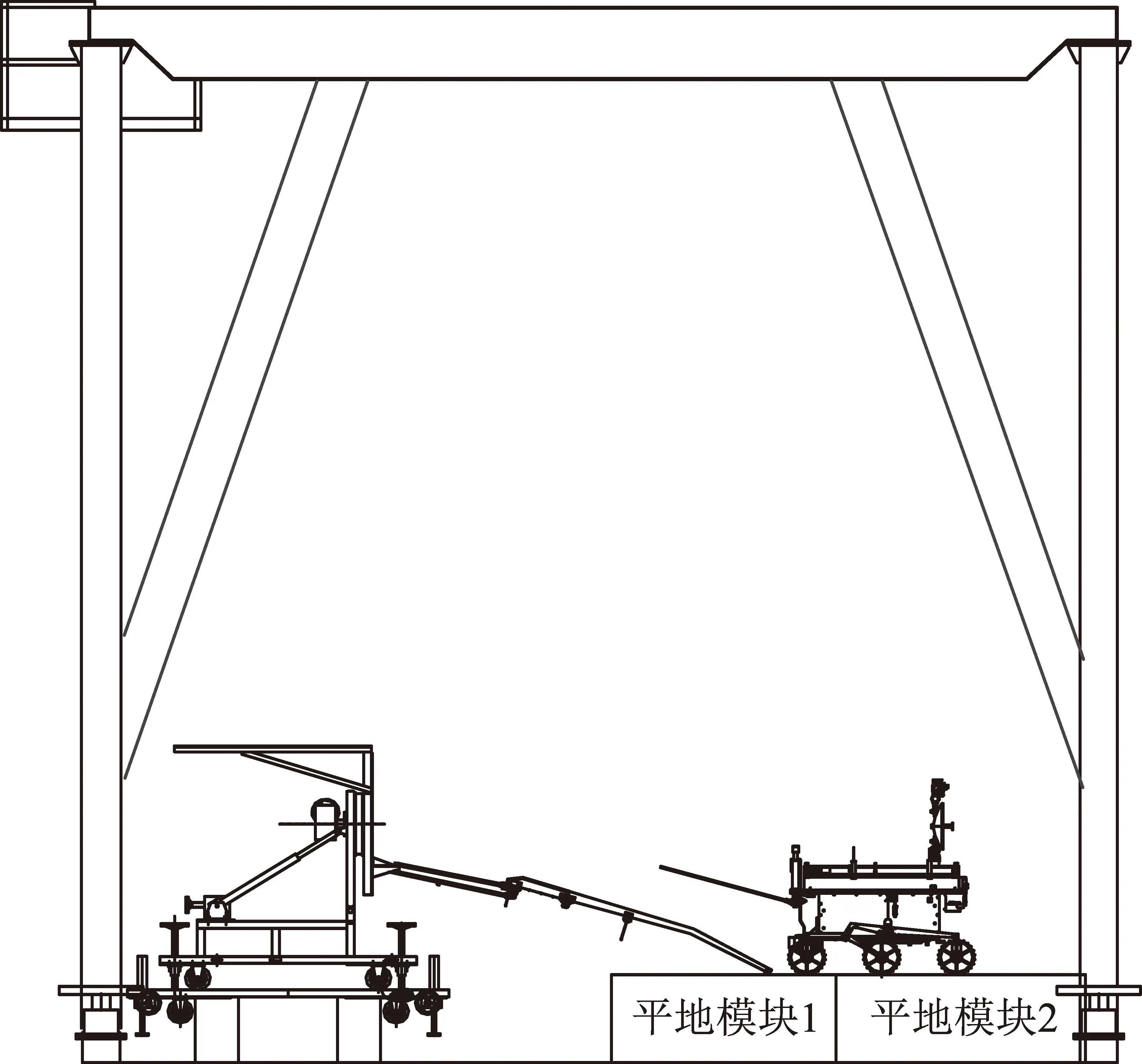
图2 低重力模拟装置下的转移机构位置
驶离性能验证包括了静态稳定性测试和移动驶离测试。静态稳定性测试巡视器在转移机构上保持的最大角度。通过比较转移机构悬梯角度、整器低重力拉力数值等确认驶离试验设置的一致性;通过比较移动过程中车轮速度、摇臂转角等参数确认巡视器驶离性能的一致性。在移动驶离过程中,巡视器摇臂转角、车轮速度等均进行相应的变动。两侧摇臂同向变动,表明转向机构悬梯向巡视器提供了相同的高度变动,而差动机构转角几乎不变,表明巡视器的俯仰角度未发生大的变动,与理论趋势保持一致。
通过巡视器驶离性能验证结果表明巡视器从着陆器转移机构悬梯上驶离的移动能力满足任务需求。试验过程中采用了转移机构悬梯的最大角度,表明巡视器在其余角度时也可顺利完成驶离过程。
3.4 巡视器月面移动性能的地面验证
巡视器月面移动性能验证的目的是测试巡视器在模拟月面上的移动性能。通过对月面崎岖地形的分析,分解为斜坡和越障两种典型地形。在巡视器月面移动性能试验中通过采用不同地形模块组装成一个完成的试验台面,巡视器在试验台面上完成相应的移动过程,通过外测获得巡视器的移动速度、转向角度、越障高度等信息,进而评价巡视器的移动性能。地形模块除了水平和斜坡模块外,还有障碍模块(障碍可拆除),障碍块高度为100 mm。地形模块的摆放如图3所示。
图3 地形模块位置
巡视器的移动方式有两种,分别为综合电子单元控制下的多电机移动和导航、制导与控制(GNC)下的移动。多电机控制下进行了前进、越障、原地转向和爬坡等工况;GNC控制下进行了盲走、原地转向和直接驱动等工况测试。工况的设置覆盖了巡视器在月面移动过程中的典型工作场景。在多电机直接控制测试中,通过比较巡视器移动车轮速度、摇臂转角等遥测数据曲线速度检验巡视器的移动性能;在GNC控制测试中,通过比较巡视器航向角变动情况检验GNC的运动控制能力。
巡视器月面移动性能验证结果表明巡视器在多电机直接控制和GNC控制下的移动性能,包括了平地、斜坡和障碍等多地形,满足指标要求。
4 嫦娥四号巡视器月面工作情况
嫦娥四号探测器于2018年12月8日2时23分在西昌卫星发射中心发射,于2019年1月3日10时26分着陆在月球背面东经177.6°,南纬45.5°附近,随后开始巡视器释放分离过程。相比嫦娥三号探测器着陆区,嫦娥四号着陆区的撞击坑数目明显偏多,着陆器前方就有一个较大的撞击坑,对巡视器的移动提出了更高的挑战。巡视器在两器释放分离后月面互拍阶段经过的月面地形如图4所示,可以看到月面的撞击坑较多。
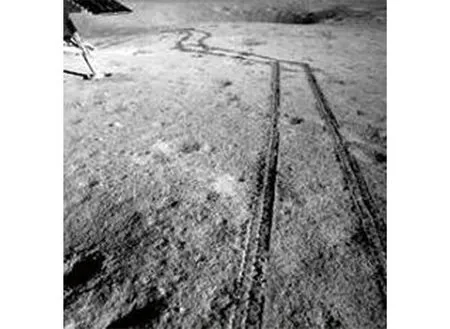
图4 巡视器经过的月面地形
巡视器在加电后,对中继接口、驶离性能和移动性能等均进行了月面的验证。
(1)在中继卫星中继链路的支持下,巡视器加电后,太阳翼、桅杆、移动装置等机构均安全可靠的工作,说明中继链路接口正确。
(2)巡视器以直行不避障方式驶离着陆器,于2019年1月3日22时30分抵达月面X点。释放分离过程中巡视器的驶离性能经过了检验,达到了安全驶离的标准,说明地面试验有效。
(3)巡视器到达月面后,巡视器采用了原地转向、行进间转向以及盲走等多种移动方式,经历了越障、撞击坑、斜坡等多种地形,累计行进了254.3 m,说明移动性能的地面验证合理有效。
嫦娥四号巡视器已在月面工作了7个月,超过了3个月的工作寿命要求。整器上行指令执行正确,下行遥测和数传正常,移动装置、+Y太阳翼和桅杆等机构工作正常,整器温度条件良好。巡视器在轨工作稳定,正常开展巡视探测任务。
5 结束语
嫦娥四号巡视器在嫦娥三号巡视器的基础上,基于嫦娥四号探测器的技术特点进行了系统设计,并在研制过程中开展了中继双向捕获跟踪和信息传输可靠性验证、嫦娥三号巡视器月面问题改进措施系统级验证、驶离性能和月面移动性能验证等试验,对嫦娥四号巡视器的功能性能进行了全面的地面验证。嫦娥四号巡视器在月背已经经历了7个月昼和月夜的考核,累计移动了254.3 m,超过了工作寿命的要求,表明总体方案可行,地面验证项目的设计合理,验证结果有效,可为我国后续月球和火星巡视器的研制提供参考。