嫦娥四号探测器推进系统设计特点与验证
2019-11-11魏彦祥郭尚群赵京曹伟许映乔
魏彦祥 郭尚群 赵京 曹伟 许映乔
(1 上海空间推进研究所,上海空间发动机工程技术研究中心,上海 201112)
(2 北京空间飞行器总体设计部,北京 100094)
嫦娥四号探测器在2018年12月8日从西昌卫星发射中心发射,2019年1月3日在月球背面成功软着陆,随后开展了月面勘查和科学探测,探测任务取得了圆满成功。嫦娥四号探测器推进系统为探测器提供地月转移轨道飞行、环月轨道飞行和动力下降飞行过程的姿态控制和轨道控制推力,为探测器月球捕获减速和软着陆月球背面提供精准推力。推进系统从探测器入轨开始到软着陆月面,全程输出高精度的推力,为嫦娥四号任务圆满成功提供了重要保证。
根据嫦娥三号探测器飞行试验结果和技术发展,嫦娥四号探测器推进系统在发动机推力精确控制和精确变推力控制等方面进行了优化设计[1-2],这些设计技术获得了地面试验和在轨飞行的充分验证,可用于其他航天器。
1 推进系统设计
1.1 总体设计方案
嫦娥四号探测器采用双组元推进剂恒压挤压式姿态、轨道统一控制推进系统,由气瓶、贮箱和发动机等组件组成。探测器采用“十字”隔板构型,4只推进剂贮箱对称布置在“十字”隔板之间,1台变推力发动机位于中心,2只气瓶位于侧板外侧,姿态控制发动机分布在外部斜面板上。贮箱采用两端固定方式,底端与过渡承力板以法兰方式轴向固定,顶端采用3根侧拉杆与“十字”隔板径向固定,气瓶采用底支架和箍带方式安装,气液路管路、阀门、总装通类等沿总体“十字”隔板和底板布置。
1台7500 N变推力发动机为探测器提供近月制动及着陆下降过程中变轨、减速、悬停的轨道控制推力,16台150 N推力器和12台10 N推力器分为2个功能相同的分支,为探测器在轨飞行和着陆下降过程提供姿态控制推力,为中途修正、环月轨道调整、环月降轨提供轨道控制推力。嫦娥四号探测器推进系统的系统原理和结构构型如图1所示。
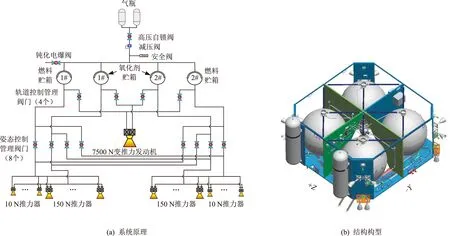
图1 推进系统的系统原理和结构构型
1.2 功能组成
嫦娥四号探测器推进系统分为氦气增压部分、推进剂输送部分、推进剂利用部分和驱动控制电路部分4个功能模块。其中:氦气增压部分由气瓶、电爆阀、减压阀、气路自锁阀、安全阀及管路等组成,提供贮箱工作时的挤压气体。推进剂输送部分由贮箱、液路自锁阀及管路等组成,用于贮存和供应发动机工作时所需的推进剂。推进剂利用部分由7500 N变推力发动机、150 N推力器及10 N推力器组成,提供探测器飞行过程轨道控制和姿态控制的动力。驱动控制电路部分由推进线路盒和推进配电盒组成,接收控制系统的指令,驱动推进系统的阀门、电机等负载运动,并采集遥测参数。
1.3 工作模式
嫦娥四号探测器飞行分为5个阶段,推进系统对应不同的工作模式。
(1)发射段:推进系统在适应各种力学环境的同时,按照飞行程序要求完成推进阀门(包括电磁阀和自锁阀)加电和姿态控制管路真空排气。
(2)地月转移轨道飞行段:器箭分离后推进系统首先进行贮箱增压和姿态控制管路充填,建立姿态控制推力器的工作状态,姿态控制推力器点火工作完成消初偏。推进系统完成轨道控制管路真空排气和轨道控制管路充填,建立探测器轨道控制工作状态。推进系统使用8台150 N推力器进行1次中途修正轨道调整,然后在12月12日7500 N发动机点火工作323 s,完成减速近月制动,探测器被月球成功捕获,准确进入200 km×400 km的环月轨道。
(3)环月飞行段:推进系统在环月飞行段完成环月轨道调整和环月降轨工作,使用150 N推力器完成变轨。此后,探测器准确进入15 km×100 km的环月轨道,为动力下降作好准备。
(4)动力下降段:7500 N发动机先在额定推力7500 N工况下点火工作进行主减速,接着以变推力模式连续工作,依次完成快速调整段、接近段、悬停段、避障段和缓速下降段工作,动力下降687 s后在月球背面软着陆。
(5)月面工作段:探测器在月面着陆后,推进系统采用4台150 N推力器点火工作进行推进剂钝化。推进剂钝化完成后打开推进系统的气路钝化电爆阀,排空气瓶和贮箱内的氦气,完成全部钝化工作。钝化后推进系统完成全部飞行任务,最后完成断电处理。
2 推进系统设计特点分析
嫦娥四号探测器推进系统充分继承了嫦娥三号探测器推进系统的成熟技术和成熟方案,同时根据嫦娥三号探测器飞行试验过程和技术发展,进行了优化和改进设计,具有如下特点。
2.1 发动机推力精确控制和高精度变推力设计
因为月球背面地形崎岖,布满高山和撞击坑,为实现嫦娥四号探测器精准着陆月面,推进系统必须提供精确的控制推力和高精度的变推力输出。为此,推进系统设计采用减压阀高精度调试、飞行产品管路系统地面测试和流阻调节、7500 N发动机地面热标、飞行参数和地面参数联合仿真等方法,以提供高精度的发动机装订推力[3-4]。
推进系统7500 N变推力发动机进行动力下降过程的推力控制,通过精准变推力调节实现探测器精准着陆月面。7500 N发动机的变推力输出,使用步进电机调节实现。步进电机控制策略在嫦娥三号的基础上进行了优化,提高了变推力控制的精度和可靠性[5-7]。步进电机采用128 ms控制周期,每个控制周期电机最多运动120步,每步运动时间1 ms。步进电机在1000 Hz的驱动频率下,其转子在最小启动间隔时间内还处于振荡区,因转子自身惯量产生的动态启动附加转矩影响,步进电机存在因驱动转矩不足而失步的风险。为提高步进电机转动的可靠性,需要提高步进电机的启动输出转矩,可采用提高步进电机供电电压、升频启动控制、更换输出力矩更大电机等方法。综合考虑时间、经费、硬件改动最小等因素,推进系统采用“3-2-1”升频启动设计策略,即步进电机启动频率越低,输出转矩越大。每个控制周期走第1步时电流保持3 ms,走第2步时电流保持2 ms,从第3步起每步时长为1 ms。
2.2 轨道控制管路超压管理设计
为保证推进系统可靠密封,在非变轨期间7500 N发动机上游的轨道控制管理阀门保持关闭状态。由于在飞行过程中太阳照射角度变化和7500 N发动机工作后热反侵等影响因素,封闭的轨道控制管路压强会随温度变化而升高或下降。为使压强在允许的安全范围内,要控制轨道控制管路的压强爬升范围。嫦娥三号探测器推进系统采取的技术途径为:在测控弧段内遥控开阀泄压,在非测控弧段通过延时指令开阀泄压。此方法存在飞控工作量大、对测控依赖性强、阀门动作次数多等缺点。为解决上述问题,嫦娥四号探测器推进系统采用“热控管理和自主泄压”的冗余方法。轨道控制管路充填或7500 N发动机点火工作结束后,打开轨道控制管路管理阀门同时进行轨道控制管路加热,加热到设定温度阈值后调低管路温度阈值并关闭轨道控制管理阀门。此后,轨道控制管路压强自主管理程序使能,轨道控制管路压强超压后自主开阀泄压。其轨道控制管路超压管理流程见图2。
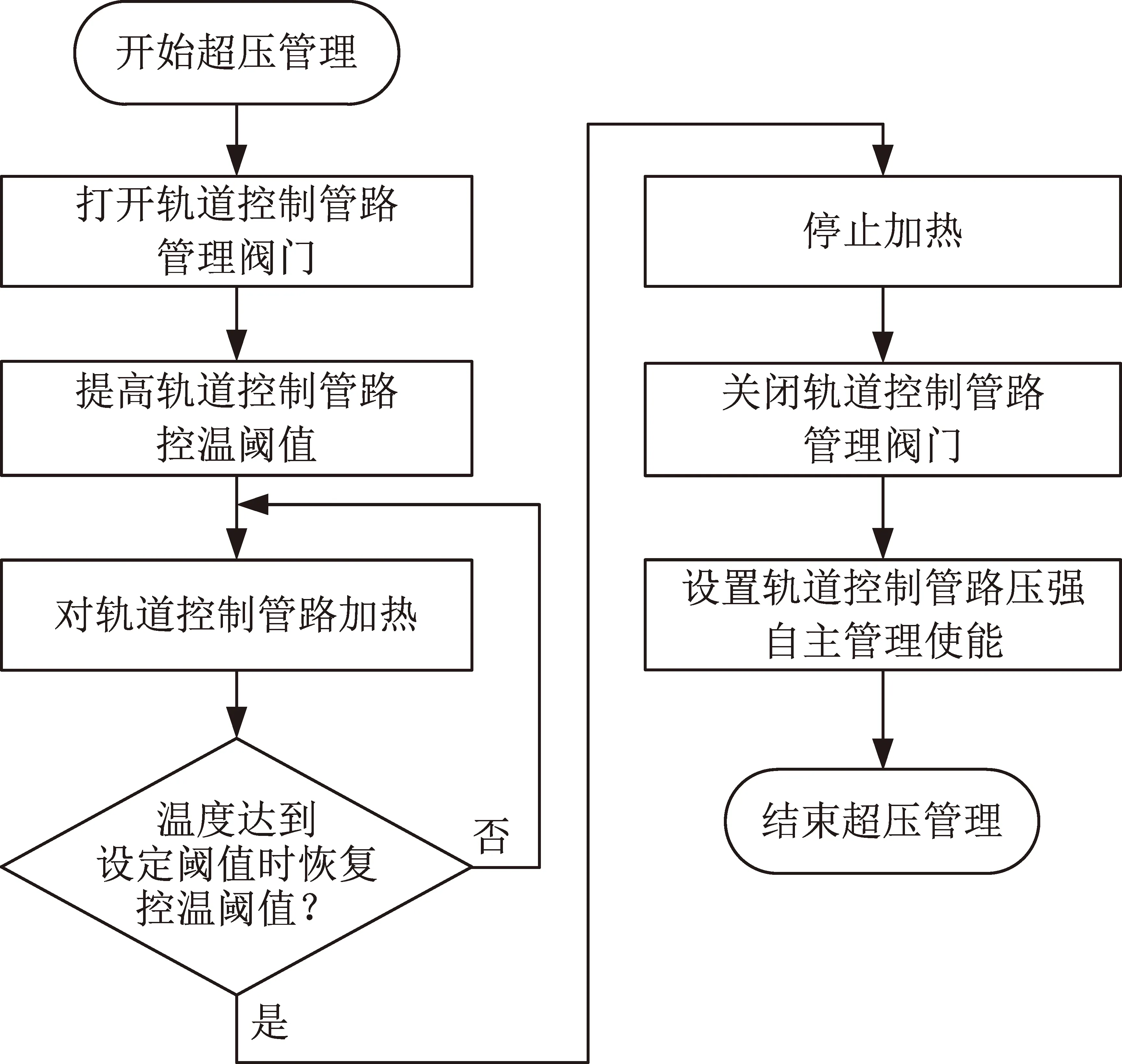
图2 轨道控制管路超压管理流程
2.3 月面高可靠推进剂钝化设计
嫦娥四号探测器着陆到月面后剩余一定量的推进剂,气瓶、贮箱也处于带压工作状态。在月面长期工作期间,经受月昼、月夜交替的高低温环境,存在安全风险,需要对剩余推进剂和增压气体进行排出钝化处理[8]。在推进剂钝化过程中,遥测信息和钝化指令都通过中继卫星转发,都有延时,因此,钝化方案要适应中继转发模式,同时为保证安全要具备容错能力。
考虑中继延时影响,嫦娥四号探测器推进系统采用长时钝化和短时钝化结合使用的钝化方案。首先采用长时钝化策略(10 min,5 min,2 min),当氧化剂路或燃料路的4个压强遥测有2个下降到1.6 MPa时,关闭钝化发动机,改用短时钝化策略(50 s,10 s,5 s);当氧化剂路或燃料路的4个压强遥测有2个下降到(1.40±0.05)MPa时,关闭钝化发动机,推进剂钝化结束。这样既解决了中继延时对钝化的影响,也规避了中继通信故障可能给钝化带来的各种风险。推进剂钝化流程如图3所示。
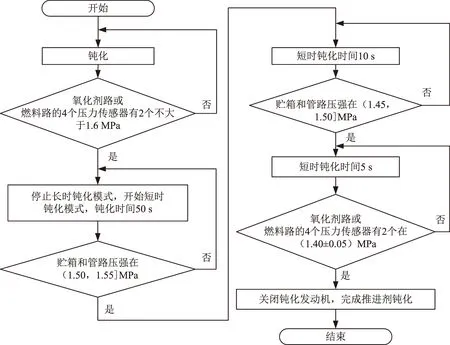
图3 推进剂钝化流程
2.4 气瓶在轨提高裕度设计
根据嫦娥三号探测器在轨飞行数据分析,动力下降过程由于7500 N发动机连续大流量工作,气瓶内气体快速消耗,导致气瓶温度快速下降,着陆后气瓶最低温度-34 ℃,接近气瓶的验收试验温度-35 ℃。嫦娥四号探测器推进系统通过研制期间气路系统真空放气专项试验,制定了动力下降前提高气瓶裕度的方案,即动力下降前调高气瓶的控温阈值,对气瓶加热,气瓶温度提高到22 ℃。
2.5 发动机量化极性测试设计
发动机极性是推进系统的关键特性之一,目前其主要测试方法是目视、耳听、手摸,存在测试不量化、记录难追溯、易漏判和误判的风险。嫦娥三号探测器推进系统极性测试采用物理喷气的方式,再通过目视、耳听、手摸的方式确认结果。嫦娥四号探测器推进系统采用发动机量化极性测试设计,把气体压强信号和气流声音信号转化成电信号,实现了发动机极性测试量化,测试数据可记录和可追溯。
3 试验验证
在嫦娥四号探测器飞行过程中,推进系统全程输出了精确的姿态控制推力和轨道控制推力。在探测器着陆月面后,推进系统在中继模式下可靠、安全地完成了剩余推进剂和增压气体的钝化工作。推进系统的各项功能和性能通过在轨飞行进行了全面验证。
3.1 推力精确控制和高精度变推力验证
1)推力精确控制在轨验证
在嫦娥四号探测器飞行过程中,推进系统进行了6次变轨,其中4次变轨使用8台150 N推力器,2次变轨使用7500 N发动机,详见表1。在变轨工作过程中,7500 N发动机推力偏差最大0.5%,150 N推力器推力偏差最大2.1%,均远优于2.0%和5.0%的指标要求,验证了推进系统推力精确控制设计的正确性。
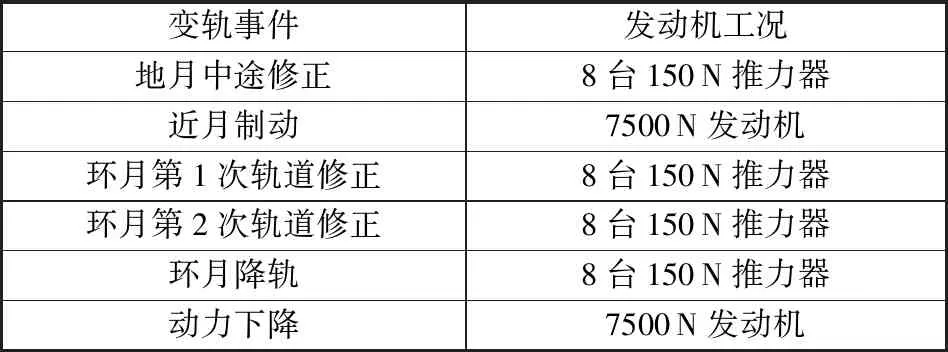
表1 嫦娥四号探测器变轨工况
2)高精度变推力验证
嫦娥四号探测器推进系统在变推力控制策略上进行了优化设计,在研制过程中,推进系统通过步进电机测试台测试、推进系统与控制系统联试、推进线路盒与7500 N发动机联合热试车,对步进电机驱动方案进行了充分验证。
推进线路盒与7500 N发动机联合热试车过程的燃烧室压强与电机步数见图4,图中7500 N发动机燃烧室压强与电机步数的变化规律一致,证明7500 N发动机与推进线路盒工作协调,变推力工作可靠。嫦娥四号探测器动力下降过程的变推力调节曲线见图5,图中变推力曲线与预期一致,证明嫦娥四号探测器飞行过程变推力调节控制正确,保证了嫦娥四号探测器的精准着陆。
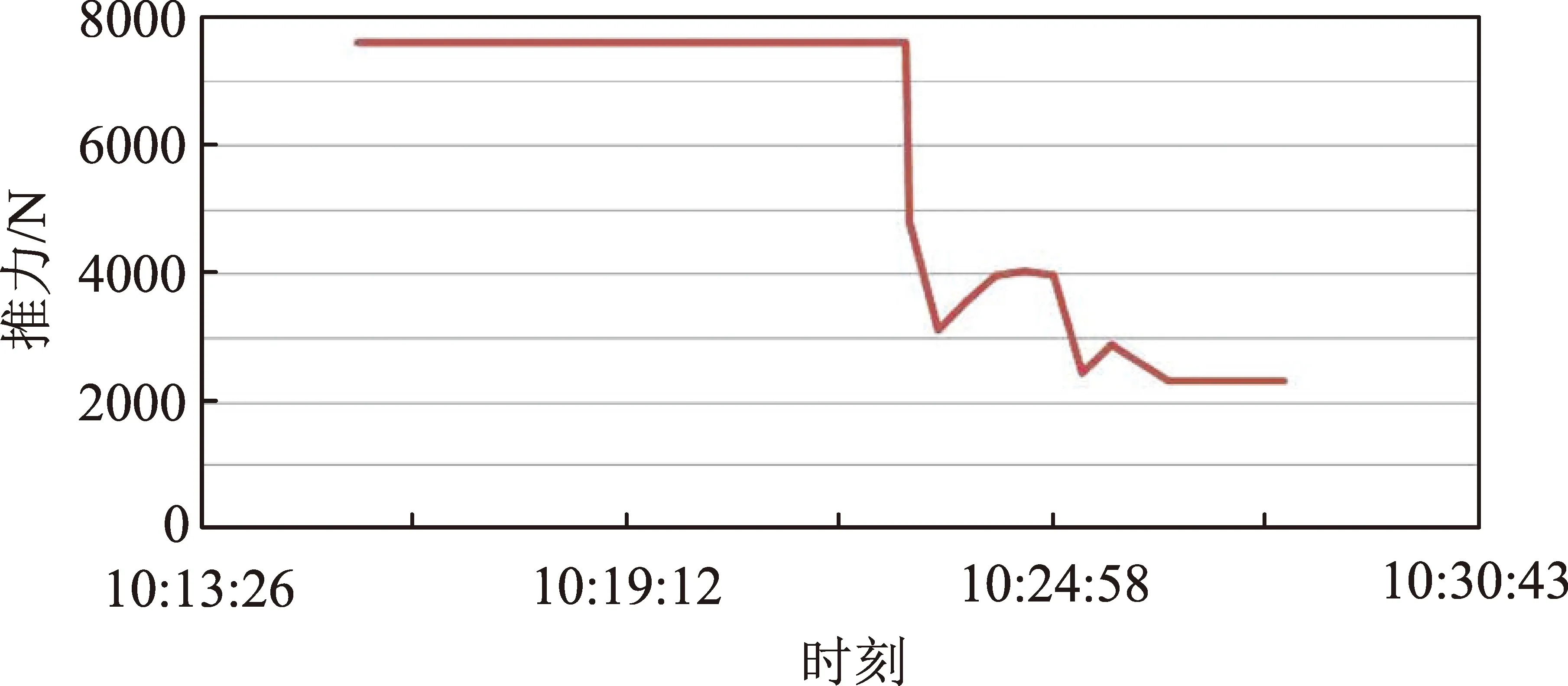
图5 嫦娥四号探测器动力下降过程推力曲线
3.2 轨道控制管路超压管理方法在轨验证
1)轨道控制管路充填后超压管理在轨验证
2018年12月8日,推进系统完成轨道控制管路推进剂充填后,在12:59开始实施轨道控制管路超压管理,提高轨道控制管路控温阈值对轨道控制管路实施加热,13:55完成轨道控制管路加热后关闭轨道控制管路管理阀,然后将轨道控制管路设置为超压自主管理方式,随后轨道控制管路压强开始逐渐下降并趋于稳定。到12月12日近月制动前,轨道控制管路保持低压状态,未出现超压现象,在轨验证了此管路加热管理压强方法的有效性。
在推进剂充填完成后,轨道控制管路的温度和压强在加热前后的变化过程见图6和图7,图中ZTMR173和ZTMR174分别为氧化剂路和燃料路轨道控制管路温度,ZTMT007和ZTMT008分别为轨道控制发动机燃料阀入口压强和氧化剂阀入口压强。图6中轨道控制管路温度在加热过程中升高,关闭加热器后轨道控制管路温度缓慢下降。随着轨道控制管路温度下降,图7中轨道控制管路的压强也相应下降,并保持低压状态。
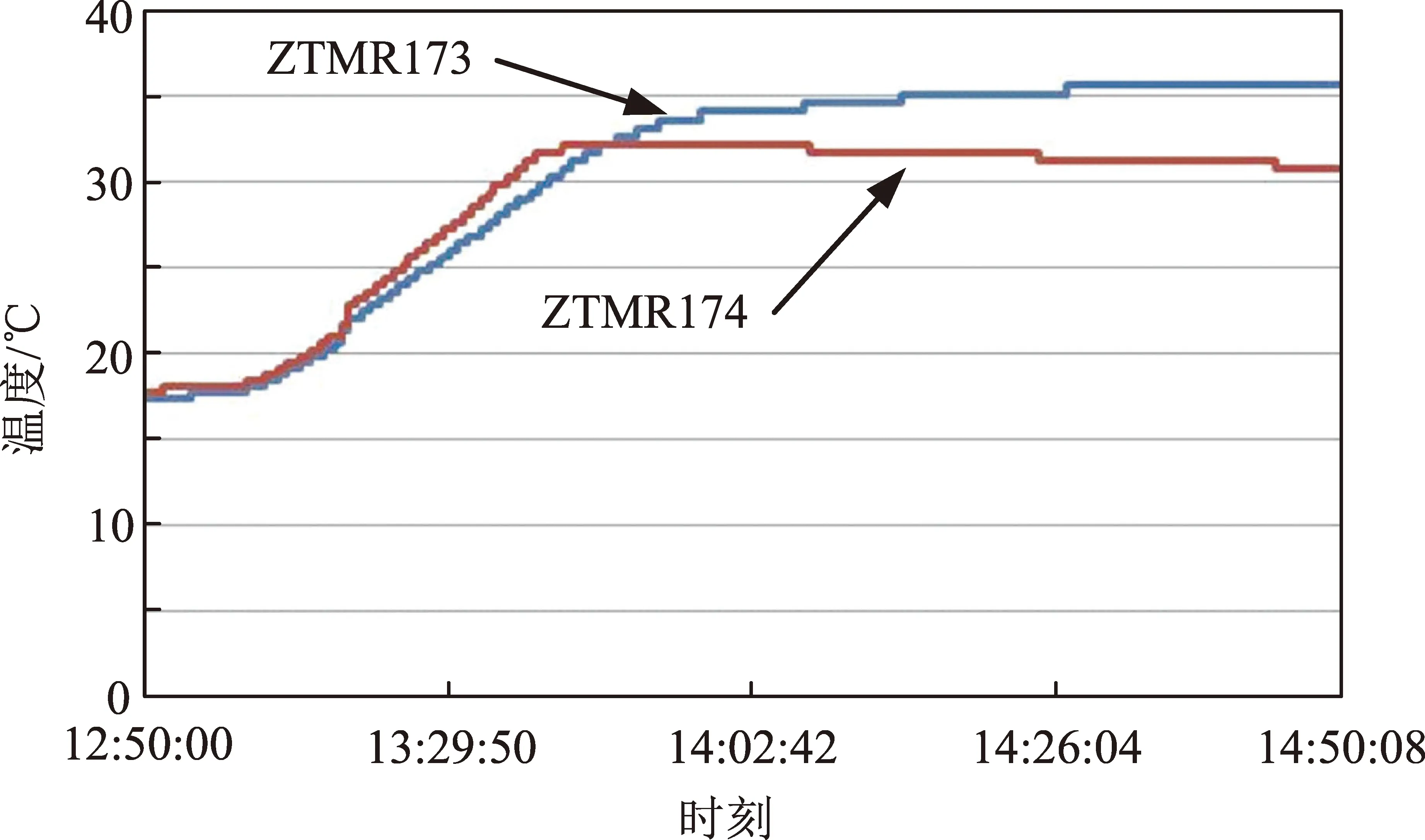
图6 第1次加热过程中轨道控制管路温度变化
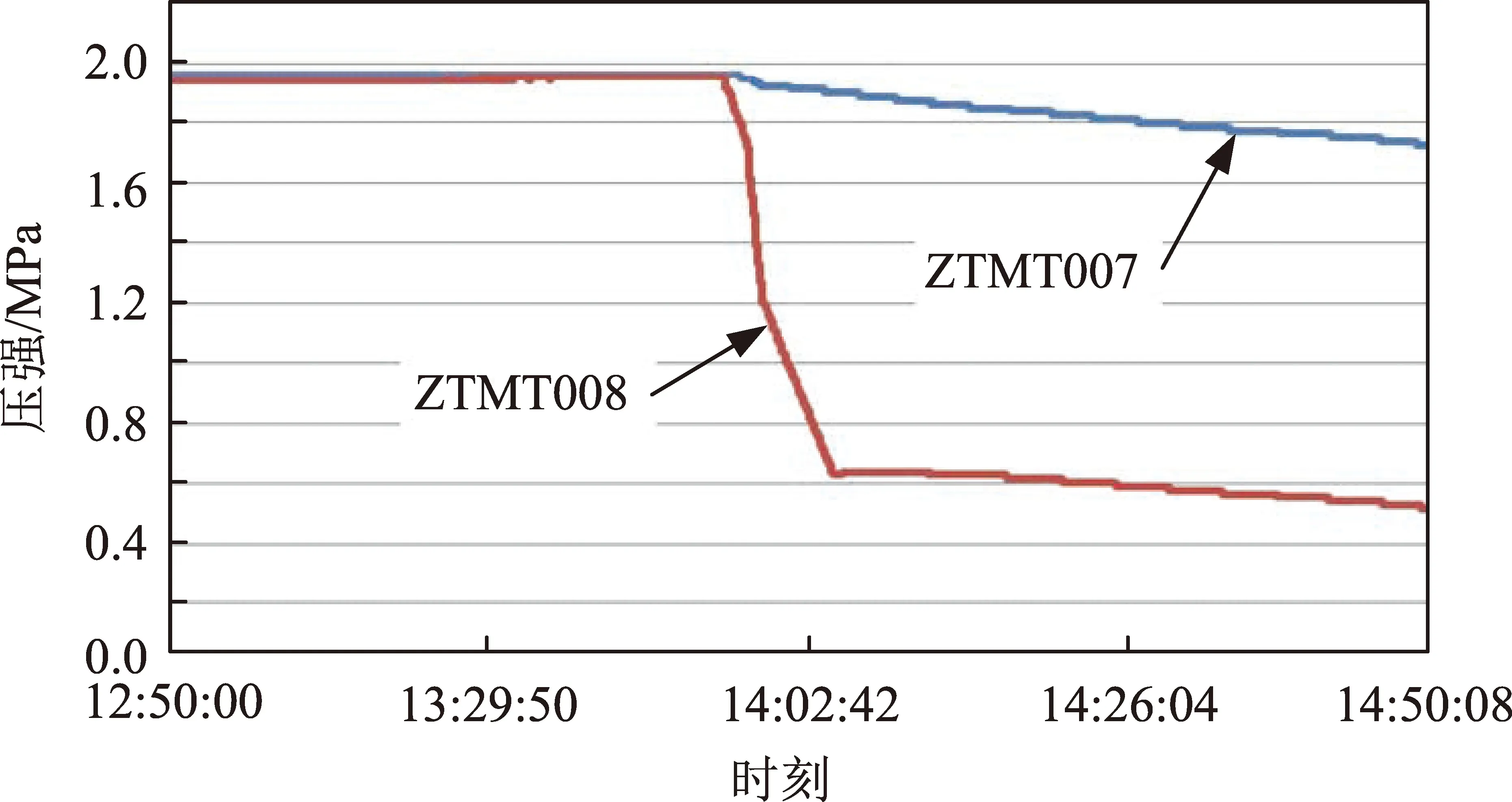
图7 第1次加热过程中轨道控制管路压强变化
2)近月制动后轨道控制管路超压管理在轨验证
2018年12月12日16:39:25,嫦娥四号探测器进行了近月制动,7500 N发动机工作323.55 s后关机,随后推进系统再次进行了轨道控制管路超压管理,近月制动后轨道控制管路压强变化见图8,温度变化见图9。
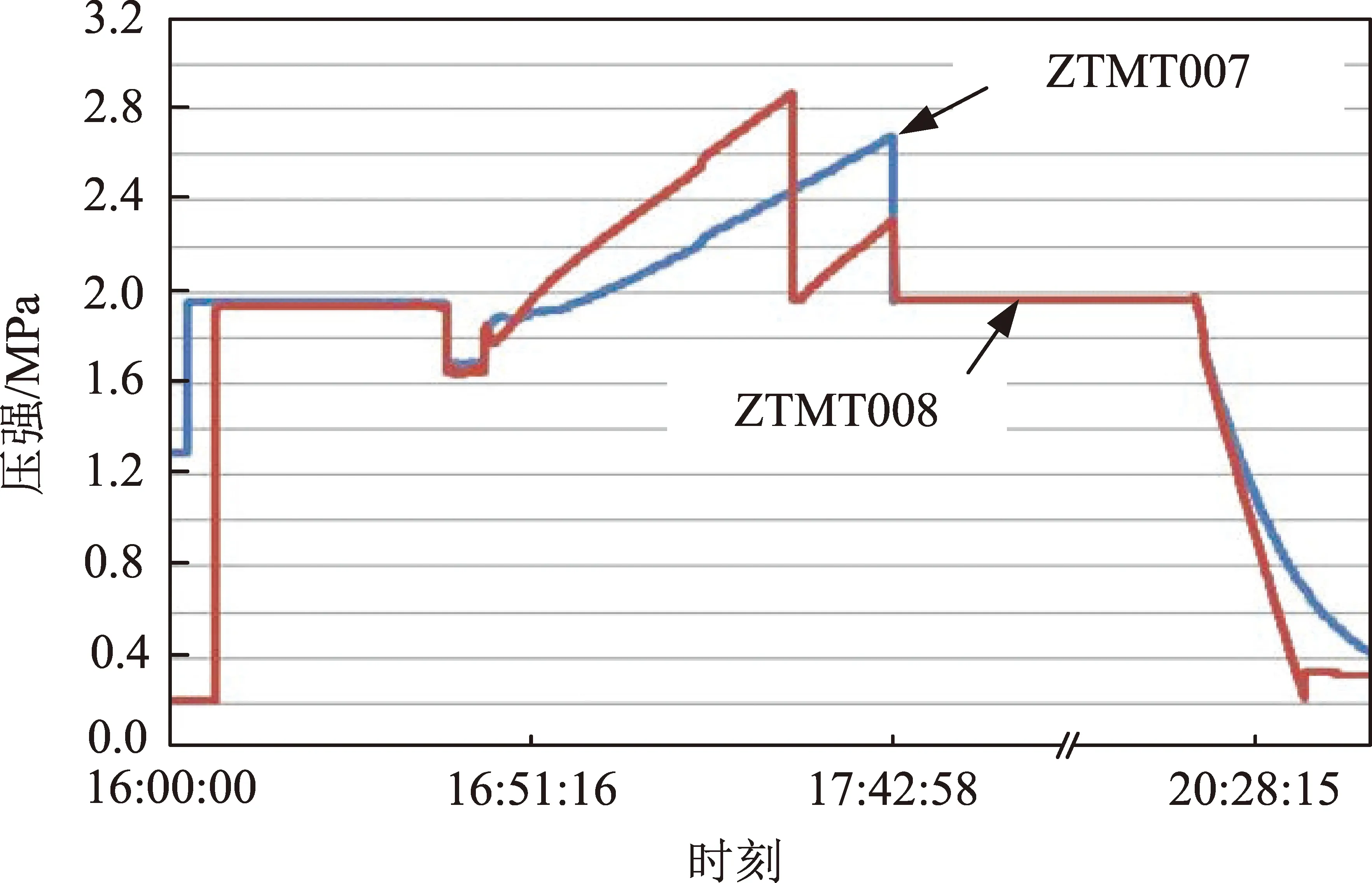
图8 近月制动后轨道控制管路压强变化
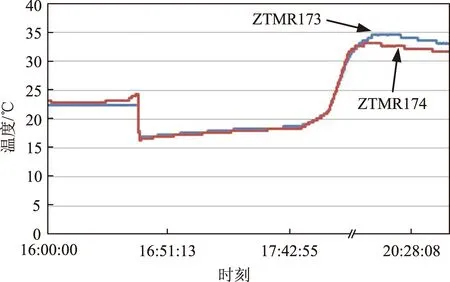
图9 近月制动后轨道控制管路温度变化
图8中,7500 N发动机工作后关闭大流量自锁阀,轨道控制管路压强ZTMT007和ZTMT008开始爬升,处于超压自主管理模式,期间氧化剂路进行了1次开阀自主泄压。17:45,打开大流量自锁阀,对轨道控制管路加热,加热期间ZTMT007和ZTMT008维持不变。轨道控制管路加热到温度阈值后,关闭大流量自锁阀,ZTMT007和ZTMT008逐渐下降并趋于稳定。到动力下降前,轨道控制管路保持低压状态,氧化剂路和燃料路均没有出现超压现象。
图9中,7500 N发动机关机后轨道控制管路的温度缓慢升高,在实施轨道控制管路加热后温度升高速率增加,加热到设定温度关闭加热器后,ZTMR173和ZTMR174逐渐下降。近月制动后的轨道控制管路超压管理过程,既验证了推进系统加热管理压强的方法,也验证了超压自主管理方法,证明轨道控制管路超压管理设计合理、正确,减少了大流量自锁阀泄压动作次数,提高了推进系统的可靠性。
3.3 推进剂钝化方案在轨验证
2019年1月3日,嫦娥四号探测器着陆到月球背面后,12:01,推进系统开始进行月面钝化工作。4台150 N推力器连续工作了9 min,之后又分别进行2次50 s和4次10 s的短时钝化。当燃料姿态控制管路压强降低到1.45 MPa时,150 N推力器关机,推进剂钝化完成。12:33,打开气路钝化电爆阀,对气瓶和贮箱内的氦气进行排空,12:59,完成全部钝化工作。
推进剂钝化过程中贮箱出口压强和姿态控制管路压强的变化见图10和图11。其中:ZTMT003,ZTMT004,ZTMT005,ZTMT006分别为燃料箱1、氧化剂箱1、燃料箱2和氧化剂箱2的出口压强;ZTMT009,ZTMT010分别为姿态控制1路燃料和氧化剂供应管路压强,ZTMT011,ZTMT012分别为姿态控制2路燃料和氧化剂供应管路压强。在推进剂钝化过程,图10中的燃料贮箱压强和图11燃料姿态控制管路压强先同步下降到1.45 MPa,满足推进剂钝化完成判据后关闭钝化发动机。钝化结束时,图10和图11中的贮箱出口压强和姿态控制管路压强均降低到约为0。这是国内首次在地外天体及中继通信模式下可靠、安全地完成剩余推进剂钝化处理。
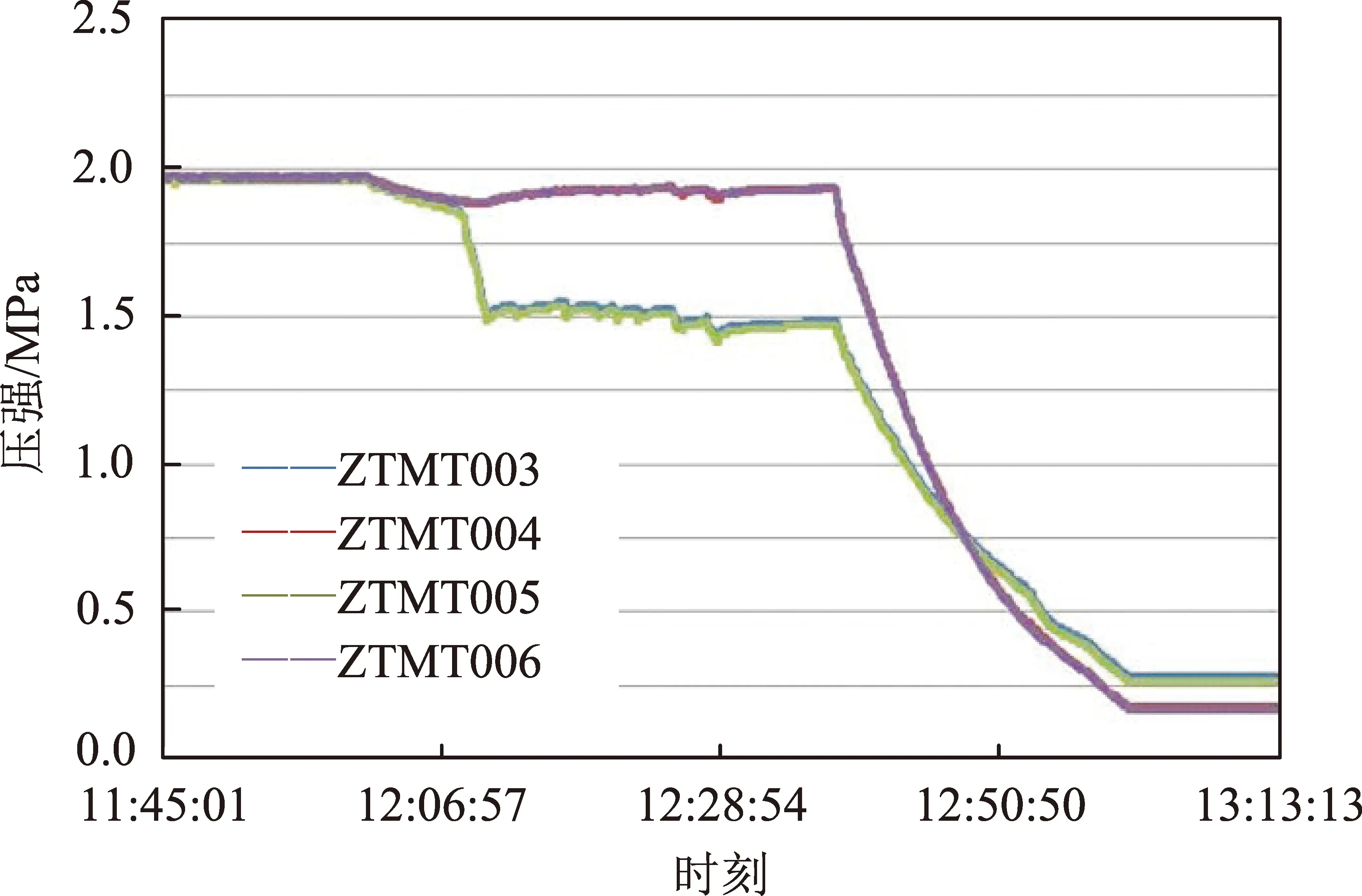
图10 钝化过程贮箱出口压强变化
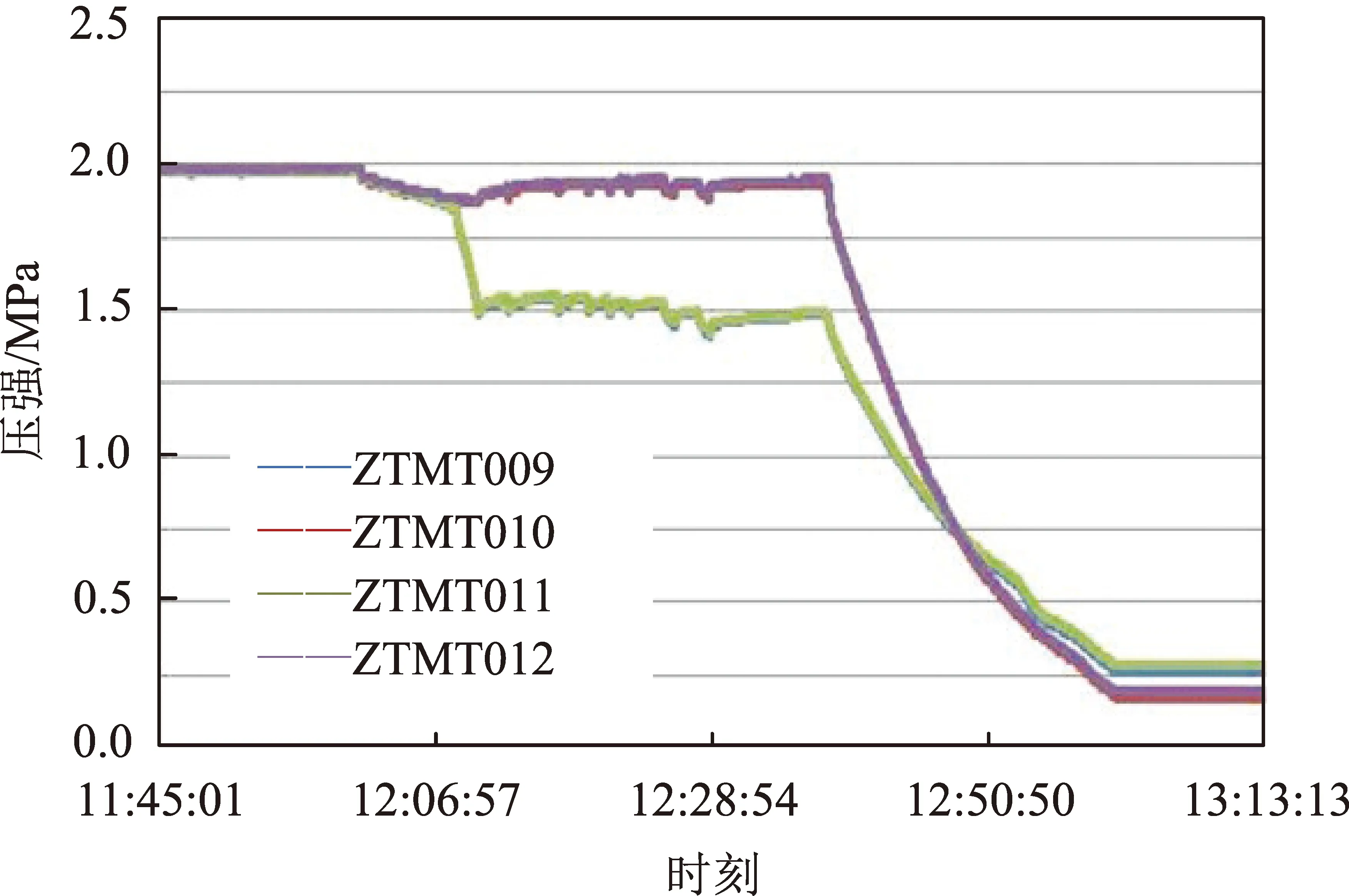
图11 钝化过程姿态控制管路压强变化
3.4 气瓶在轨提高裕度设计方案在轨验证
2018年12月31日,动力下降前推进系统调高了气瓶的控温阈值:主份加热器阈值为25~27 ℃,备份加热器阈值为23~27 ℃,气瓶温度由10~11 ℃升高到动力下降前的22~23 ℃。动力下降过程气瓶的压强和温度变化见图12和图13,图中,ZTMR078和ZTMR079分别为气瓶1外壁温1和外壁温2,ZTMR080和ZTMR081分别为气瓶2外壁温1和外壁温2。图12给出了动力下降过程气瓶压强的变化情况,气瓶压强由23.3 MPa下降到7.7 MPa。图13给出了动力下降过程气瓶温度的变化情况,气瓶温度由22~23 ℃下降到-19.96~-31.91 ℃。动力下降结束,气瓶压强为7.7 MPa、满足推进系统减压阀正常工作要求,气瓶最低温度为-31.91 ℃、高于嫦娥三号探测器的-34 ℃,验证了在轨提高气瓶温度裕度的方案正确、有效。
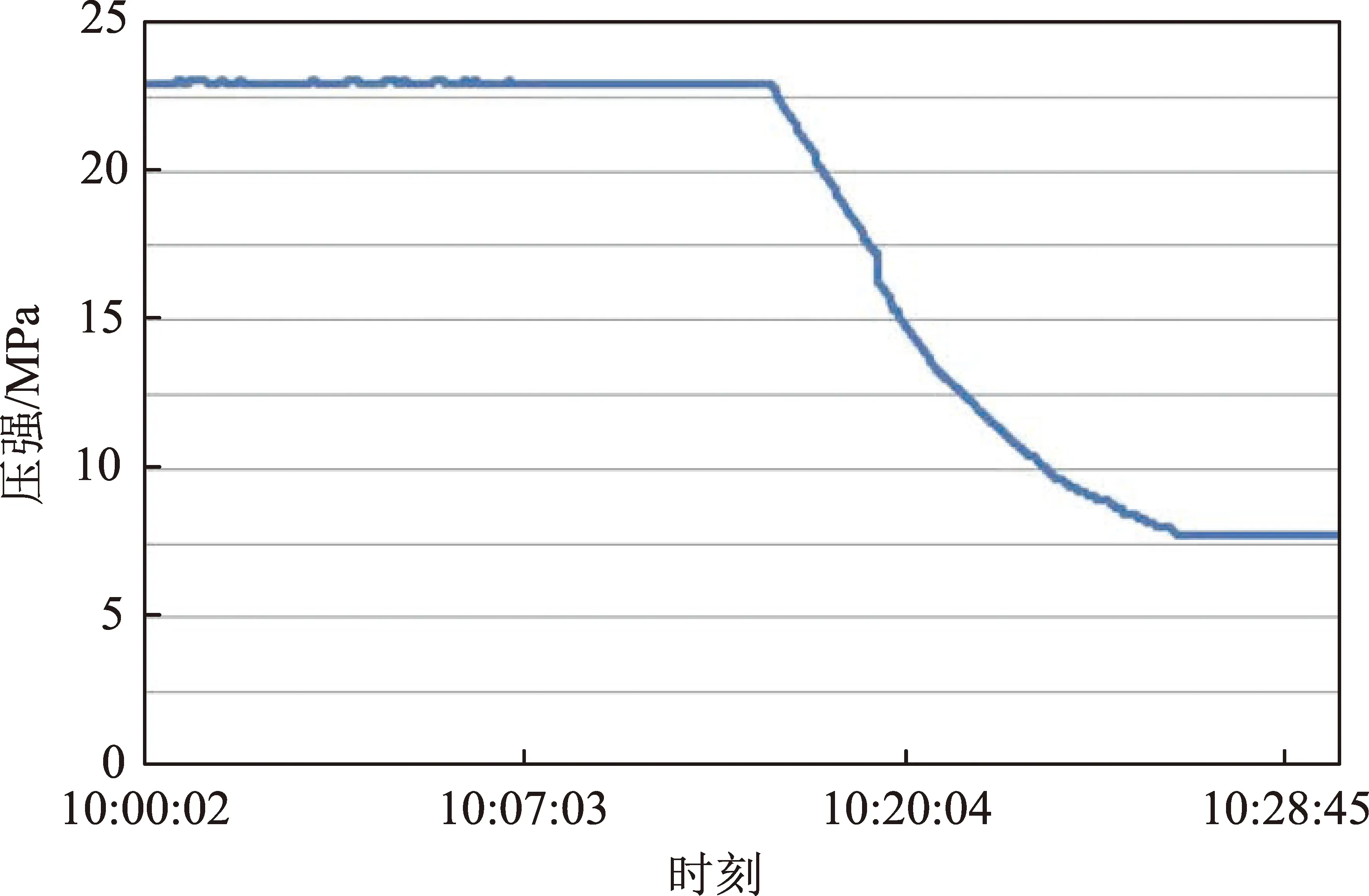
图12 动力下降过程气瓶压强变化
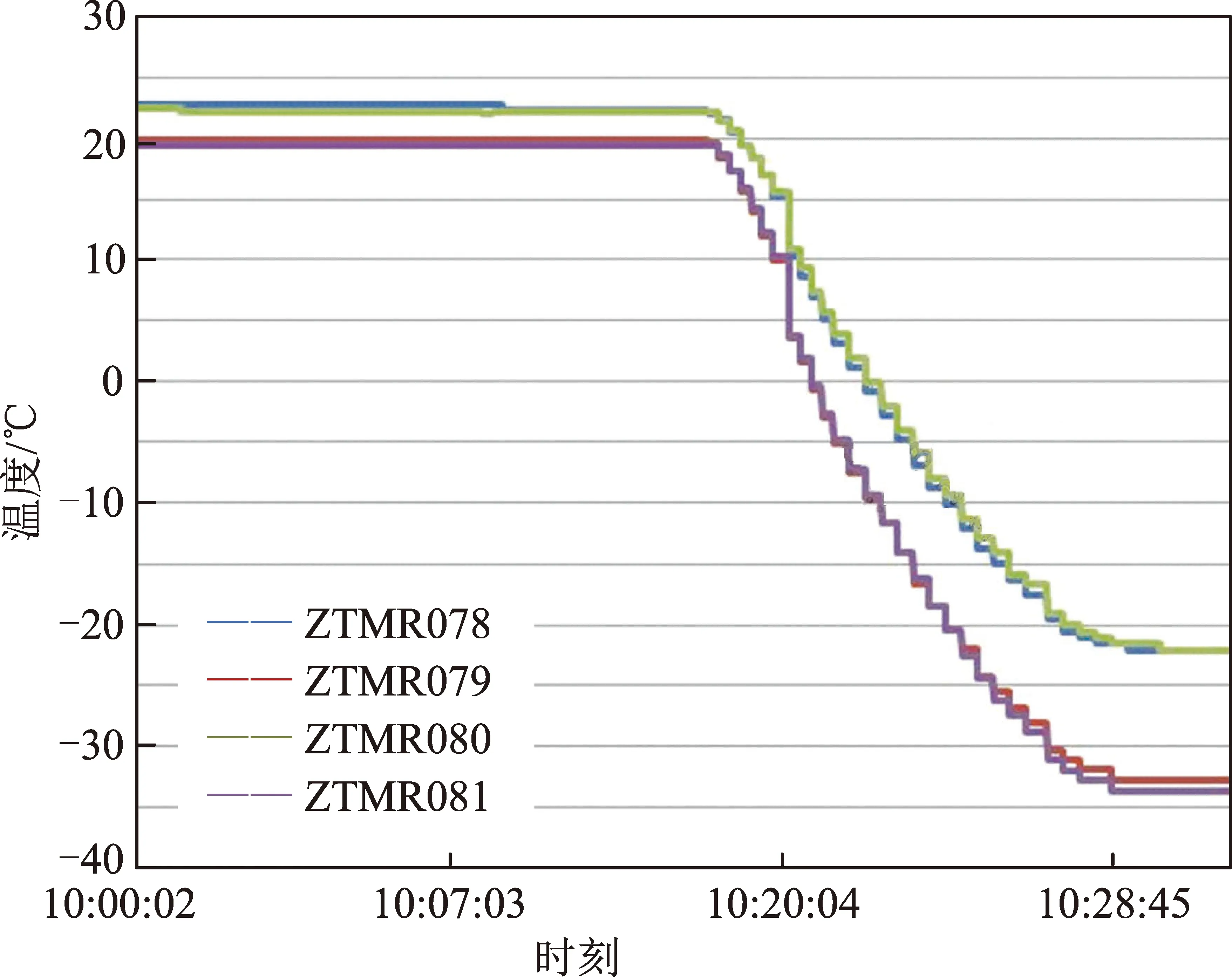
图13 动力下降过程气瓶温度变化
3.5 发动机量化极性测试验证
嫦娥四号探测器推进系统采用物理喷气的方法进行极性测试,通过量化极性设备采集喷气流量信号和声音信号,转化成电信号并记录,以确认姿态控制发动机、变推力轨道控制发动机、步进电机和自锁阀极性的正确性。图14给出了推进系统全部28台姿态控制发动机在A1分机极性测试时的极性信号,A1~A6、B1~B6、C1~C8、D1~D8为分机号,纵坐标极性信号1为开,0为关),A1分机极性测试时采集到A1分机为开状态(信号为1)、其他分机为关状态(信号为0),与实际状态一致。
嫦娥四号探测器飞行过程,推进系统的姿态控制和轨道控制功能执行正确,在轨验证了发动机的量化极性测试正确、有效。
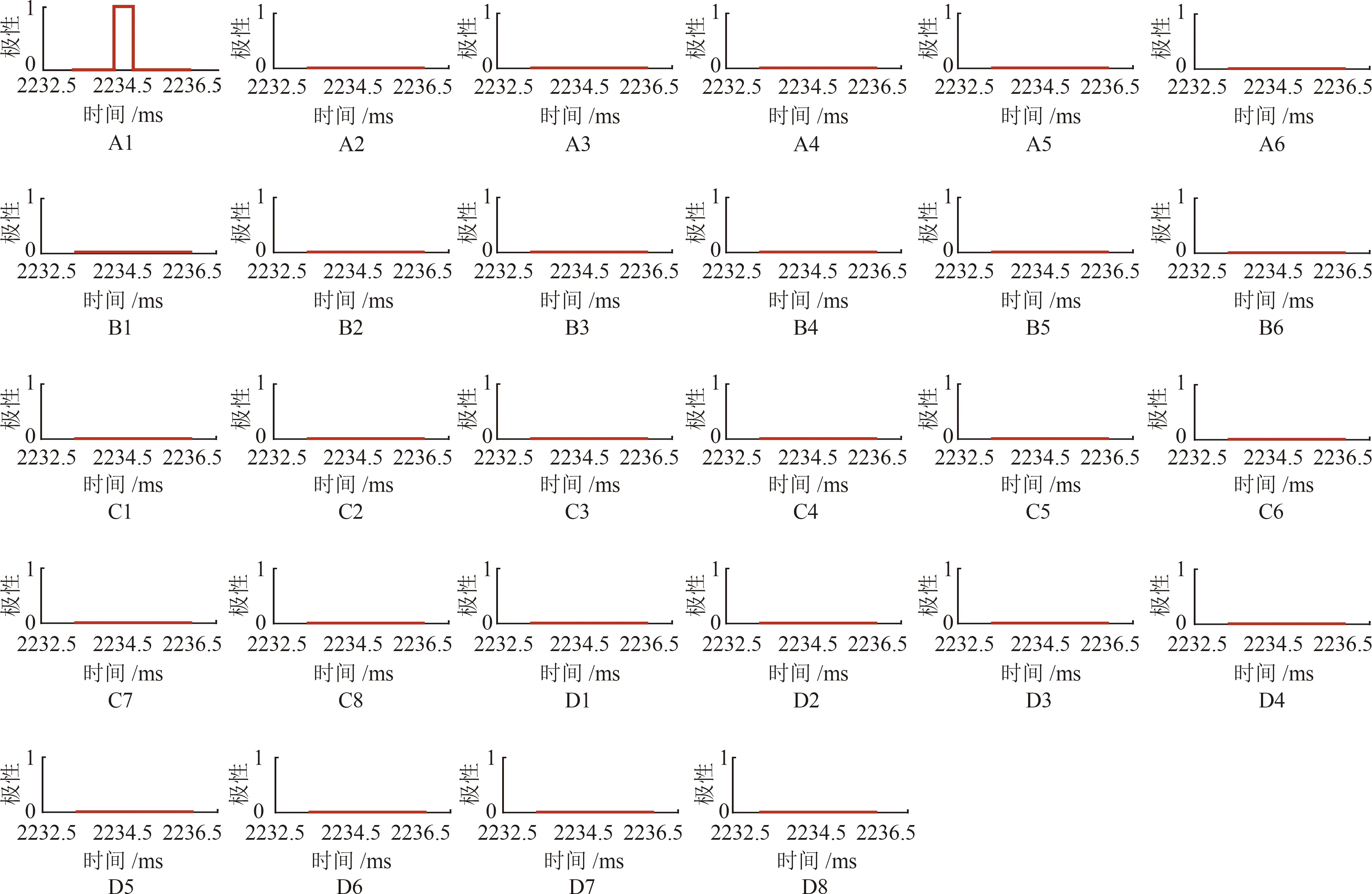
图14 推进系统姿态控制发动机极性
4 结束语
嫦娥四号探测器推进系统在充分继承嫦娥三号探测器的技术方案基础上进行了多项优化设计。通过地面试验和嫦娥四号探测器在轨飞行试验,证明推进系统设计正确,各项技术指标均满足任务要求。推进系统采用的发动机量化极性测试技术实现了发动机极性测试量化、可记录,解决了发动机极性测试难追溯、易漏判和误判的困难。气瓶在轨提高裕度设计在不改变系统硬件配置的前提下,实现了提高气瓶裕度的目的。轨道控制管路超压管理设计,既解决了管路超压的安全性问题,又减少了自锁阀的动作次数,提高了推进系统的可靠性。发动机推力和变推力精确控制,为探测器精准着陆月面提供了推力保证。中继模式下的钝化技术,在国内首次完成了地外天体、中继通信模式下可靠、安全的钝化工作。推进系统取得的各项技术成果,可为其他航天器提供参考。