三层介质中任意方向电偶极子旋转产生的感应电场
2019-11-07张建春王向军
张建春,王向军
(海军工程大学电气工程学院,湖北 武汉 430033)
0 引言
舰船在海水中由于不同材料间的电化学腐蚀产生腐蚀电流轴频电场,国内外学者纷纷对其进行研究分析,并在电场特性分析及防护衰减方面做出了大量贡献[1-4]。通常认为轴频电场产生机理是腐蚀电流经过大轴时发生调制产生的,轴频电场的信号基频与螺旋桨的转速基本一致。但是基于该产生机理制作产生的防护装置对实船进行电场防护时,仍有1%的轴频电场信号无法消除[5-6]。根据船体与螺旋桨构成的电化学腐蚀原理[7],螺旋桨表面与海水之间会产生由极化带电粒子构成的双电层,该双电层的电荷层分别由螺旋桨表面的剩余电子及海水中的正离子两部分组成,其中螺旋桨表面的极化带电粒子随着螺旋桨的转动产生感应电场,其基频与螺旋桨转速一致,是轴频电场的组成部分。研究螺旋桨表面极化带电粒子的感应电场可对轴频电场的产生机理进行完善,为电场防护的制备及增加防护效果提供理论基础。电偶极子作为研究电场的成熟模型,可对其进行有效仿真及分析。
故本文针对螺旋桨旋转时产生的感应电场,提出了基于任意方向的电偶极子旋转时的建模方法,得到了该情况下电场三分量幅值及频率特征,并通过实验验证的模型仿真结果的正确性。
1 理论分析
将舰船螺旋桨等效为任意方向的直流电偶极子,对三层介质中电偶极子产生的感应电场利用镜像法进行推导,假设电偶极矩为Idl=Ixi+Iyj+Izk,其中i、j、k及Ix、Iy、Iz分别为x、y、z方向上的单位向量及电偶极距。电偶极子的位置为(x0,y0,z0),当x分量位于直角坐标x轴上,电偶极子以角速度ω绕x轴旋转时,电偶极矩及介质参数分布如图1所示。
图1 旋转电偶极子Fig.1 Rotating electric dipole
绕x轴旋转t时刻后,电偶极矩分量Iy、Iz均发生变化,Ix保持不变。电偶极子各分量可表示为:
(1)
根据镜像法得,在t时刻任意方向电偶极子在海水中(x,y,z)位置处产生的电位可表示为:
(2)
式(2)中,η=(σ1-σ2)/(σ1+σ2),σ1、σ2分别为海水及海床电导率,
r1k=(x-x0)i+(y-y0)j+(z-2kD+2h+z0)k,r2k=(x-x0)i+(y-y0)j+(z-2kD-z0)k,r1m=(x-x0)i+(y-y0)j+(z+2mD+2h+z0)kr2m=(x-x0)i+(y-y0)j+(z+2mD-z0)k。
当电偶极子位于坐标原点时,根据边界条件[8]
(3)
式(3)中,当i=0时,Γ为z→-h;当i=1时,Γ为z→D-h。
整理式(2)并化简可得,

(4)
式(4)中,±η的选取由不同介质分界层处的边界条件决定。
由此可进一步求得t时刻电场三分量表达式:

2 实例仿真
为排除地磁场磁化产生的感应电场[9],电偶极子模型选取铂电极等效,将两个材质规格完全相同的1 cm×1 cm铂片电极固定在长10 cm可旋转的塑料支架两端,放置在电导率σ1为3.98 S/m、规格3 m×5 m×0.8 m的水池中。当对其输入15 mA直流电流时,利用三分量电场传感器测量铂电极静止时水池不同位置处的电场强度,采用最小二乘法对测量得到的电场三分量幅值进行拟合,计算得到三轴电偶极矩为:Ix≈0.8 mA·m;Iy≈1.1 mA·m;Iz≈0.63 mA·m。令铂电极对绕Ix≈0.8 mA·m方向以ω=5π rad/s旋转,旋转中心与水面距离为0.2 m。假设海床电导率为σ2=0.1σ1,测量点位于空间坐标(1.5,2,0.5)时的电场三分量仿真如图2所示。

图2 仿真计算结果Fig.2 Result of simulation
由图2可知,电场三分量峰-峰值各不相同(x分量峰-峰值约为1.9×10-5V/m,y分量分量峰-峰值约为0.6×10-5V/m,z分量分量峰-峰值约为1×10-6V/m),z分量约为x分量大小的1/20,且y分量与z分量相位相差π/2,x,y分量初始相位相同,但三者信号频率均为2.5 Hz,与旋转频率一致。因相位差的存在,使电场模值在同一周期内产生两个大小不等的峰值。
3 实验验证
将算例仿真中的铂电极对作为电偶极子模型,将其置于由工业盐配制的电导率为3.98 S/m的水池中,水池规格3 m×5 m×0.8 m,采用银-氯化银材料的三分量电场传感器对水中的电场进行测量,测量系统设置采样频率1 000 Hz,实验设计如图3所示。
图3 实验设计原理图Fig.3 Schematic diagram of experimental design
实验中三分量传感器按算例中的空间坐标放置,实测信号经放大滤波处理后[10],与理论结果对比图如图4所示,其中实线为仿真结果,虚线为实验结果。
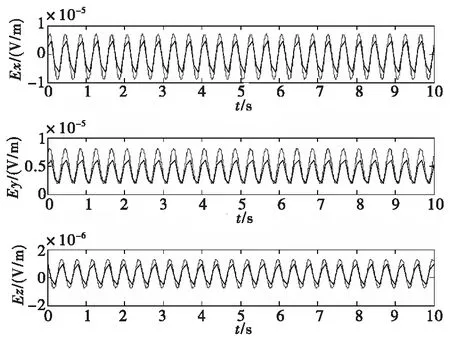
图4 实验与仿真对比Fig.4 Comparison of experiment and simulation
测量期间保持旋转速度固定,当支架旋转稳定后对电场三分量进行采集,实验与仿真结果峰-峰值如表1所示。从图4、表1得出:三分量的幅值大小仍存在较大误差,其主要原因在于池底电导率与仿真设定的σ2=0.1σ1有差异及旋转支架在旋转过程中因受水的阻力而发生轻微工艺变形使铂电极对之间距离发生变化等方面造成的,但电场三分量实测数据与仿真结果均在同一数量级,信号频率均为2.5 Hz,且相位特征与仿真结果得出的结论基本一致。因此,实验结果验证了极化带电粒子旋转产生感应电场是轴频电场组成部分结论的正确性。
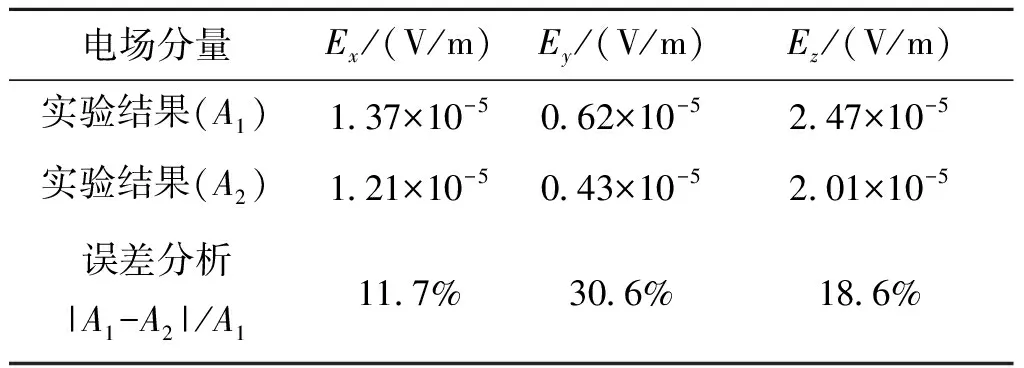
表1 实验与仿真结果分析
4 结论
本文提出了利用旋转直流电偶极子对三层介质中螺旋桨旋转时产生感应电场的建模方法,并对其理论结果进行了推导及实验验证,该建模方法能够对螺旋桨感应电场的时域进行建模分析,仿真结果可体现螺旋桨旋转时产生的感应电场的特性规律。仿真实验与实例分析表明,电偶极子在海水任意位置处产生的感应电场频率与旋转频率一致,且电场z分量与x分量相位始终相差π/2。此外,实验与仿真结果的对比进一步说明海床电导率及电偶极矩的大小均会对电场幅值产生影响,使实测结果与仿真结果存在较大误差。