基于集合经验模态分解和小波阈值的真空泵振动信号降噪方法
2019-11-07李一博刘嘉玮芮小博
李一博,刘嘉玮,芮小博,王 晢,綦 磊,2
(1. 天津大学 精密测试技术及仪器国家重点实验室,天津 300072;2. 北京卫星环境工程研究所,北京 100094)
0 引言
为保证航天器在复杂空间环境下的平稳运行,需要进行空间环境的地面模拟试验,其中低温和高真空是重点要求的模拟环境[1]。真空泵作为地面空间环境模拟的重要设备,故障发生频率较高会导致真空泵性能下降、低温下噪声异常等[2]。因此,需要对真空泵结构进行在线故障诊断,及时发现设备的性能变化,以保证真空泵的正常运行与试验安全。对作为此类机械设备状态信号载体的振动信号进行实时采集监测,并采取适当的信号处理方法进行分析处理一直是相关领域的研究重点。在实际工作环境下,受到现场环境噪声的影响,振动信号中的故障特征信息常被淹没在噪声信号中,影响对故障特征量的提取[3]。因此,如何对真空泵的振动信号进行有效的降噪处理是实现真空泵在线故障诊断的关键问题之一。
针对真空泵等机械设备振动信号的降噪方法较多,目前主要采用以小波分解为主的降噪方法,例如赵鹏等[4]利用改进的阈值函数对信号进行小波降噪处理;章浙涛等[5]利用小波包分解后的多阈值方法进行降噪处理,都取得了一定的效果。经验模态分解(empirical mode decomposition, EMD)是由Huang 等[6]提出的适用于非线性、非平稳信号的处理方法。该方法将信号分解成若干个从高频到低频依次排列的固有模态函数(intrinsic mode function,IMF),具有一定的频率分层性能。刘忠等[7]将EMD与小波降噪相结合用于水轮机声发射信号的处理,但未具体说明如何选择IMF 分量进行小波处理。吴召华等[8]提出一种集合经验模态分解(ensemble empirical mode decomposition, EEMD)方法,可有效抑制EMD 中存在的模式混叠现象。陈仁祥等[9]利用EEMD 处理得到IMF 分量,把前若干个IMF分量去除,对保留下的IMF 分量进行重构得到降噪后的信号,但这种方法可能将有用的高频信号滤除。
本文针对上述已有方法的不足之处,提出将EEMD 方法与小波阈值方法相结合,应用在真空泵的振动信号降噪中。该方法利用分析固有模态函数的自相关特性进行IMF 分量选择,通过小波阈值方法对筛选出的含噪分量进行降噪处理,最后进行分量重构从而达到更好的降噪效果。
1 方法理论基础
1.1 EEMD 基本理论
EMD 又称Huang 变换,相较于传统小波分解而言是一种新型时频分析方法,它无须事先选择基函数,仅根据信号的局部特征进行自适应的时频分解。EMD 理论算法通过循环剔除信号中由极大值点与极小值点组成的上下包络线均值,使其能够严格满足每个IMF 分量形成条件,将原信号x(t)分解成若干个固有模态函数分量c1(t)、c2(t)、 ···、cn(t)与1 个余项r(t)的和,即

EEMD 是对EMD 的改进:为了克服EMD 算法由于异常事件的存在导致极值点分布不均,从而产生模态混叠,令IMF 分量失去原有物理意义的问题,吴召华等[8]创造性地将高斯白噪声信号添加到EMD 的分解过程中,利用白噪声的频谱均匀性和零均值性,经过多次EMD 分解可以有效减弱模态混叠的现象。因此,EEMD 是一种添加高斯白噪声的多次EMD 分解,其分解次数随着加入白噪声的变化而适当改变。
EEMD 的理论算法步骤如下:
1)向原始信号x(t)中加入M次高斯白噪声信号ni(t), (i=1, 2, ···,M),即

2)对xi(t)进行多次EMD 分解,得到N个IMF分量cij(t), (j=1, 2, ···,N)以及余项r(t)。其中cij(t)表示第i次加入高斯白噪声得到的第j个IMF分量。
3)将所有的IMF 分量进行总体平均计算,抵消加入M次高斯白噪声信号对IMF 分量的影响,得到由EEMD 分解产生的IMF 分量

1.2 小波阈值降噪理论
小波变换对于非平稳信号分析处理具有良好的时频局部化特征,在实际工程应用上有着重要地位。小波阈值降噪的原理已有文献[10]给出详细描述,本文不再赘述。文献[11]通过仿真实验分析认为,采用固定阈值规则和软阈值函数处理的小波阈值降噪效果要优于其他组合方式,因此本文选取该种组合方式进行降噪处理。软阈值函数是将高于阈值的小波系数进行一定程度的收缩,将低于阈值的小波系数置为0,以得到整体连续性较好的新小波系数,能更好地保留信号中的有用信息,其函数表达式为
2 EEMD 小波阈值降噪
2.1 IMF 分量的筛选
信号经过EEMD 分解后,能够得到若干个频率由高到低排列的IMF 分量。依据这种固有性质,文献[13]提出构建时空滤波器,通过选择其中的高频、中频和低频IMF 分量进行重构,即可实现高通、带通和低通滤波器的设计。文献[14]通过研究发现,一般信号中的噪声主要集中在低阶IMF 分量当中,因此必定存在一个临界分量将所有IMF 分量分为噪声主导与信号主导的2 部分。为合理筛选IMF 分量,引入自相关函数。信号的自相关函数反映信号在不同时刻的相似程度,归一化自相关函数可表示为

式中:Rx(t1,t2)表示信号t1时刻与t2时刻的相关函数值;Rx(0)表示信号与本身在同一时刻下的相关函数值。
随机噪声信号在不同时刻的关联性较弱,因而其自相关函数在零点处有最大取值,然后在零点两旁迅速衰减接近于0;而一般信号的自相关函数在零点取得最大值后缓慢振荡,不出现迅速衰减至0的现象。因此,可根据含噪分量的自相关函数在零点附近迅速衰减的特性,对所有IMF 分量进行自相关计算,将自相关序列中具有这一特性的IMF 分量予以提取,从而实现对含噪IMF 分量的筛选。
2.2 基于EEMD 的小波阈值降噪算法
综上分析所述,通过引入自相关函数对所有IMF 分量进行筛选,再经过小波阈值降噪处理含噪IMF 分量,最后进行分量的重构可实现信号降噪。
基于EEMD 的含噪信号小波阈值降噪算法具体步骤(参见图1)如下:

图 1 基于EEMD 的小波阈值降噪算法流程Fig. 1 Flow chart of wavelet threshold de-noising based on EEMD
1)对原始信号x(t)进行EEMD 分解,得到若干个IMF 分量和1 个余项r(t);
2)对所有IMF 分量进行自相关计算,并根据自相关函数零点衰减特性提取出含噪声的IMF 分量;
3)对噪声主导的IMF 分量进行小波阈值降噪处理;
4)将经过小波阈值降噪处理后的IMF 分量和信号主导的IMF 分量与余项r(t)进行信号重构。
2.3 仿真信号分析
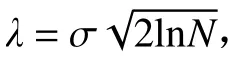
将传统小波阈值降噪法、EEMD 强制降噪法、EMD 小波阈值降噪法与本文提出的EEMD 小波阈值降噪方法(本文方法)进行仿真比较,以验证本文方法的降噪性能。以降噪试验中常用的Blocks波作为仿真信号(见图2(a)),向其中加入信噪比为8.295 5 dB 的高斯白噪声得到含噪信号(见图2(b))。信号采样频率为1 Hz,采样点数为1024。设EEMD分解过程中添加的辅助噪声标准差和次数分别为0.5 和150。含噪仿真信号经过EEMD 分解后共得到9 个IMF 分量和1 个余项,如图3 所示。
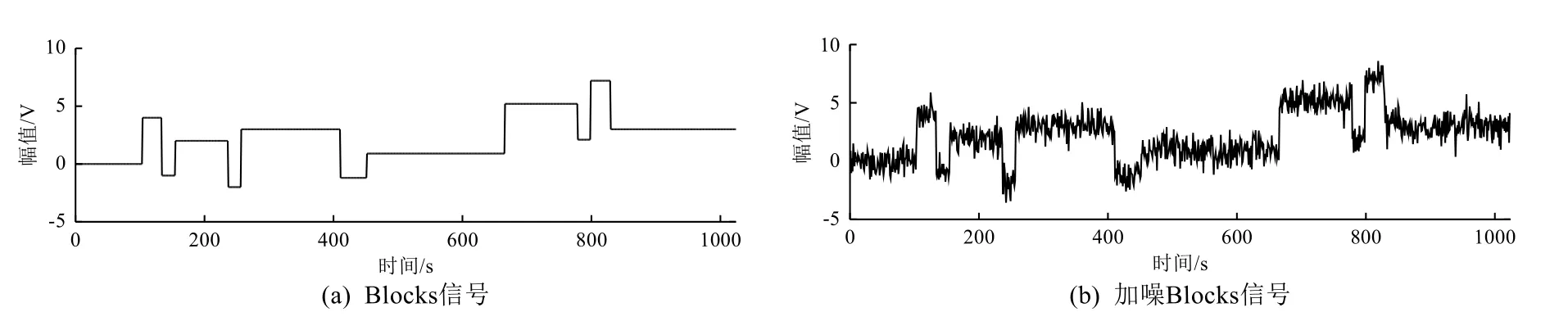
图 2 Blocks 波仿真信号及其含噪信号Fig. 2 Simulated Blocks wave signal with noise
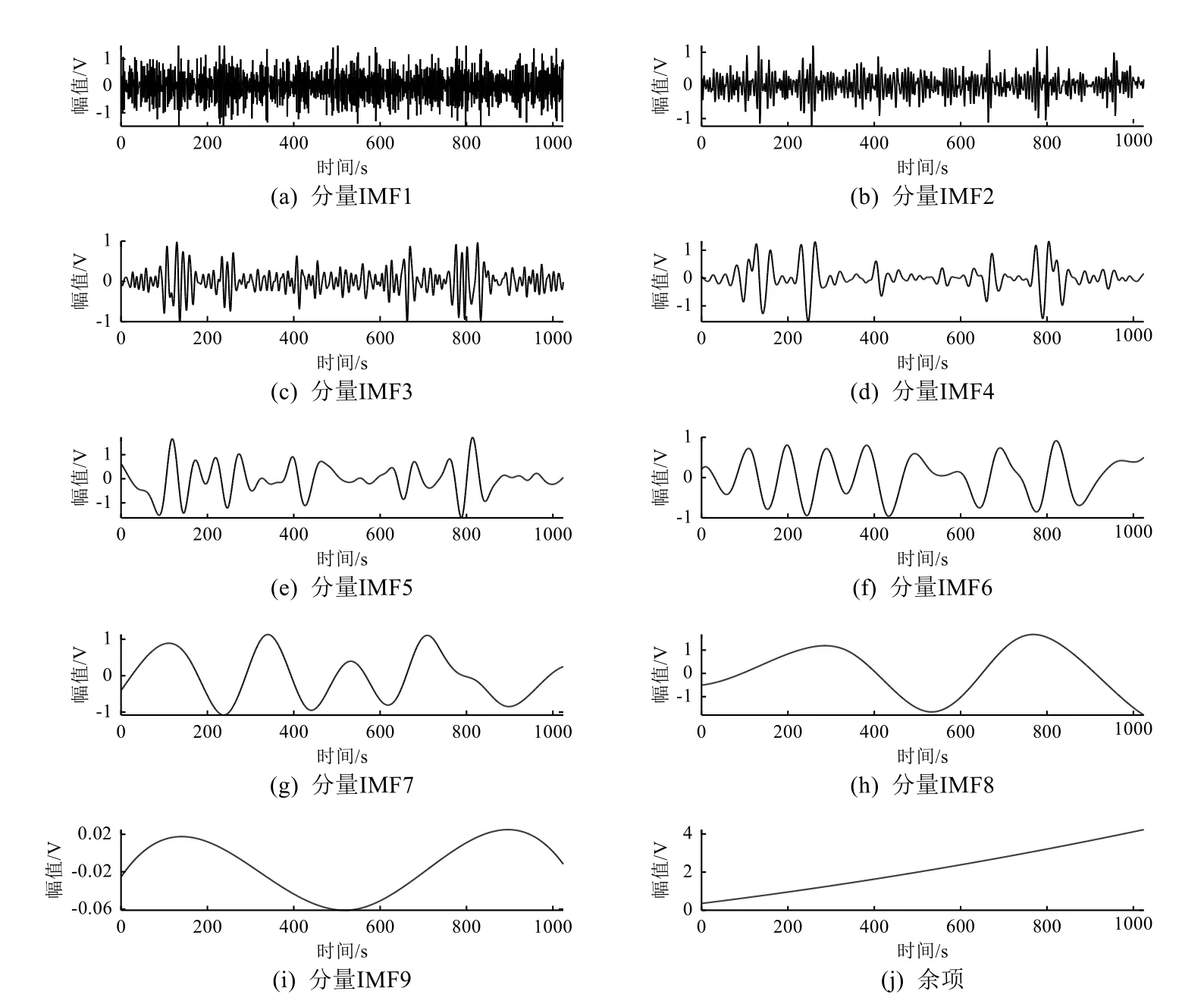
图 3 含噪仿真信号的EEMD 分解结果Fig. 3 Decomposition result of noisy simulated signal with EEMD method
将EEMD 分解得到的IMF 分量进行归一化自相关函数处理,结果如图4 所示。根据上述IMF 分量的筛选原理,IMF1、IMF2 和IMF3 在零点处取得最大值后,在零点两旁迅速衰减,表明这几个分量具有明显的含噪特征。因此选取前3 个IMF 分量进行小波阈值处理,小波基函数选取sym8 小波系,分解层数设定为4,同时保留其他信号主导的IMF分量与余项进行最后的IMF 分量重构。

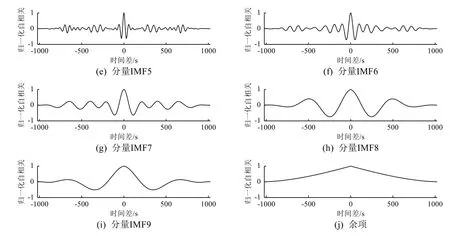
图 4 各阶IMF 分量的归一化自相关函数Fig. 4 Normalized autocorrelation function of each order of IMF components
为对不同降噪方法的性能进行定量评估,选择信噪比(SNR)和方均根误差(RMSE)作为性能衡量指标,SNR 越大、RMSE 越小,则该方法的降噪效果越好。SNR 和RMSE 的计算公式分别为:

利用传统小波阈值降噪法、EEMD 强制降噪法、EMD 小波阈值降噪法与本文方法对含噪仿真信号进行处理后的结果见图5。表1 为含噪信号及其经降噪方法处理后的SNR 和RMSE 计算结果。

图 5 多种降噪方法处理结果对比Fig. 5 Comparison among various de-noising methods

表 1 多种降噪方法处理后的信号性能指标对比Table 1 Parameter comparison among various de-noising methods
由图5 和表1 可以看出:虽然传统小波阈值降噪法和EEMD 强制降噪法处理的结果十分平滑,但丢失了许多细节信息;而EMD 小波阈值降噪法和本文方法得到的信号虽然存在微小振荡,但保留了大部分有用的细节信息,与原信号的相似度高;本文方法在处理含噪信号时不仅可大幅提高信号的SNR,还能将RMSE 控制在最小,最大程度还原出原始信号特征,降噪效果、性能指标均优于其他方法。
3 真空泵振动信号降噪分析
将本文方法应用于某型号真空泵振动信号的降噪处理。数据采集系统由上位机、NI-USB 6366型数据采集卡、前置电荷放大器和声发射传感器构成(见图6(a))。以真空泵外壳中心作为振动信号采集点进行实时数据采集,实验现场如图6(b)所示,设置采样频率为100 kHz,采样时长为0.5 s。

图 6 真空泵振动信号数据采集实验Fig. 6 The experiment setup for sampling the vibration data of vacuum pump
原始的真空泵振动信号(见图7)包含了其工作环境中的背景噪声,掩盖了真空泵工作过程中的振动冲击信号,影响到后续的振动信号特征值提取的准确性。采用本文方法对含噪振动信号进行降噪处理,经过EEMD 分解后,一共得到14 个IMF 分量及1 个余项,对所有IMF 分量进行归一化自相关计算后发现前8 个IMF 分量含有噪声(见图8),因此选取这8 个IMF 分量进行小波阈值处理,然后将所有IMF 分量和余项进行信号重构。

图 7 真空泵原始振动信号Fig. 7 Original vibration signals of the vacuum pump

图 8 真空泵振动信号经EEMD 分解后的前8 个IMF 分量Fig. 8 The first eight IMF components of vacuum pump’s vibration signals after EEMD decomposition
对真空泵振动信号分别采用前文所述的4 种方法进行降噪处理,结果如图9 所示。可以发现:经过EEMD 强制降噪的信号将前8 个IMF 分量舍弃,只保留后6 个IMF 低频分量及余项,导致其重构信号严重失真,幅值范围相比原始信号大幅下降;经传统小波阈值降噪和EMD 小波阈值降噪处理的信号同原始信号相比,已经去除大量噪声,能够大致观察到真空泵工作的冲击信号轮廓,但在有效冲击信号和2 次冲击信号间隙仍存在噪声混杂的情况;经本文方法降噪后的振动信号能够更加直观地反映真空泵在工作过程中产生的冲击振动,较好保留了原始信号的冲击周期特征与趋势,尽可能剔除了冲击信号中的噪声信号,且能在2 次冲击信号的间隙将无关噪声信号有效滤除,使信号更加平稳、精确。可见,本文方法有效,降噪性能优于其他几种方法,具有良好的实际工程应用效果。

图 9 多种降噪方法的实际应用结果比较Fig. 9 Comparison among various de-noising methods
4 结束语
目前针对常规机械设备的振动信号降噪方法较多,但针对航空航天领域使用的真空泵振动信号的降噪研究略显匮乏。基于EEMD 的信号分解利用高斯白噪声的零均值特性,通过多次循环分解保证了分解的精度,能够有效克服EMD 异常事件带来的模态混叠现象。同时,以归一化自相关函数对分解得到的IMF 分量进行含噪筛选,继而有选择性地进行小波阈值降噪处理,最后将降噪后分量与保留分量进行重构,可以实现信号的保真降噪。基于EEMD 的小波阈值降噪方法吸取了两者的优点,能提升信号的信噪比、减小方均根误差,与几种现有降噪方法比较效果最优。
本文方法可运用于地面空间环境模拟所需的真空泵设备的在线故障诊断工作中,为后续真空泵的振动故障信号特征值的提取提供了工程应用范例。
