基于机器视觉的航空导管检测方法*
2019-11-06白雪山席剑辉张修瑞
白雪山,席剑辉,徐 悦,傅 莉,张修瑞
(1.沈阳飞机工业(集团)有限公司,沈阳 110850;2.沈阳航空航天大学自动化学院,沈阳 110136;3.沈阳航空航天大学航空航天工程学部,沈阳 110136;4.成都飞机工业(集团)有限公司,成都 610091)
0 引言
航空导管是一种广泛应用于油、水、气等非腐蚀性或腐蚀性介质传输的管道,如果端头接口型面不均匀或精度不高,而检测又未能及时发现问题,就会造成管道渗漏,威胁到扩口航空导管传输介质的安全性和传输可靠性。在航空领域,飞机上的航空导管因工作压力与工作环境不同,对接头连接的强度、密封性有着不同的需求,因此,航空导管端头结构设计形式多样,有扩口接头、无扩口接头、波纹接头等,对这些端头加工质量的检测十分困难[1]。加工误差造成的质量问题如渗漏等不仅对飞机的正常装配造成了严重的影响,也直接关系到飞行使用和安全,同时对飞机的维护也造成极大的不便。
目前,航空导管型面尺寸检测多采用人工测量,效率低,误差大。近年来三坐标测量机[2]的应用日益增强,可以实现高精度的三维测试,但必须逐点测量,速度慢,而且价格昂贵。视觉测量技术是一种快速、高精度、多信息的全貌测量技术,把图像点云数据作为检测和传递信息的载体,从中提取出有用的信号,通过计算处理获取所需的各种参数及对象的三维表面数据[3-5]。机器视觉在航空复杂型面检测,蒙皮外型面测量等方面已有较好的应用。本文采用激光视觉三维扫描技术[6-8],研究航空导管端头型面三维建模检测系统,测试加工精度并做误差分析,最终实现航空导管端头型面的精确检测。
1 航空导管端头成型检测系统设计
图1 为航空导管端头激光视觉测量示意图,当航空导管进入测量视野范围,激光投射器发射出激光平面,光平面与被测物体表面相交,在空间中形成一条被物体表面高低调制的曲线,同时由摄像机进行实时同步拍摄图像。拍摄的图像交由上位机软件系统进行处理,提取出激光线在图像上的投影像素坐标,并结合相机和光平面的数学模型即可求取物体表面相应点的三维坐标。

图1 航空导管扩口激光视觉测量示意图
为实现以上测量过程,设计系统主要包括视觉测量和伺服驱动机构两部分:
1)伺服驱动部分固定在底座上,主要包括直线模组、电动机及光路微调机构。采用精密级直线模组作为线结构光的滑动平台,运行平稳、定位精准。采用高精度电机、驱动器及运动控制卡对滑动平台进行拖动及控制,可靠性高。采用光学微调转台承载线结构光视觉检测装置,使光平面的空间相对位置具有可调性,保证了检测数据的可靠性和一致性;
2)视觉测量系统是测试平台的核心部分,负责待测航空导管端头的测量、数据传输和参数计算等功能,含激光器、相机、图像采集卡等,完成图像获取和视觉处理功能。
2 航空导管端头成型检测系统算法设计
2.1 航空导管扩口视觉测试平台的数学模型建立
按照数据操作、高级算法和初级算法3 个层次设计软件架构如图2 所示。

图2 系统软件架构图
数据操作层:打造美观、友好、易操作的人机界面,直观显示航空导管端头型面三维成型结果、三维尺寸测量结果和误差分析,不依赖于第三方数据处理软件。
高级算法层:包括系统标定、三维建模数据测量和处理,提供给操作层并接受来自操作层的输入参数和命令。
初级算法层:测量系统高效、准确、快速运行的基础,主要包括:1)多视拼接。受摄像机视场范围的限制以及被测物体自身相互遮挡的影响,有时需要移动测量设备或被测对象来进行多视测量。数据拼接即把不同视角拍摄的航空导管端头型面进行正确连接,从而得到航空导管端头不同面的完整的三维数据;2)图像处理。视觉测量技术容易被测量过程中的环境光照、物体不同材质等因素影响。需要采用有效的噪音滤除方法,提高测量系统应用环境的鲁棒性。最终获取的三维点云数据将提供给高级算法层。
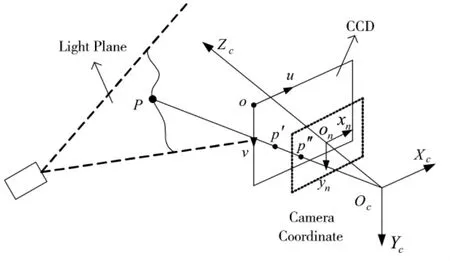
图3 激光视觉检测试验平台数学模型

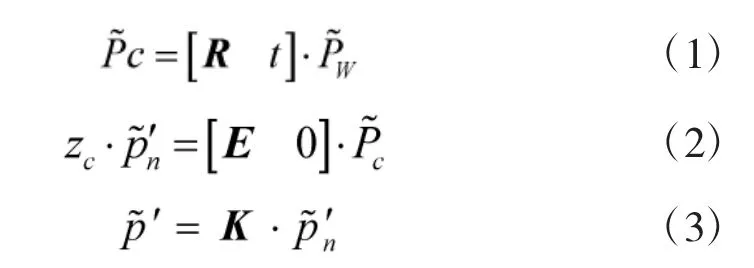
其中,R 和t 分别为世界坐标系到摄像机坐标系的旋转矩阵和平移向量,E 为3×3 的单位矩阵,K 为摄像机内参数矩阵,形式如下:
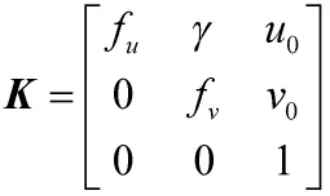
式中,fu和fv分别为CCD 像平面上u 和v 的尺度因子,γ 是u 和v 不垂直因子,u0和v0是像平面的中心点坐标。
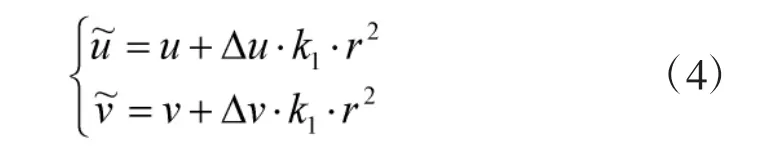
通常相机镜头存在光学畸变,使用针孔模型不能准确地描述基于激光技术的大直径扩口航空导管视觉测试平台的数学模型,因此,需要考虑畸变模型。一般采用一阶径向畸变即可满足系统测量精度的要求。一阶径向畸变模型如下:
设线结构光在摄像机坐标系下的方程为:
综上所述,更昔洛韦联合利巴韦林雾化吸入治疗可明显提高小儿疱疹性咽峡炎治疗效果,改善患儿临床症状体征,提高血清IgG、IgA、IgM水平。但本研究纳入病例数目有限,观察指标较少,未能全面评价其效果,有待作进一步研究探讨。

其中,a 为平面方程系数向量。测量前将扩口航空导管加持在V 型块上即可。测量过程中伺服机构带动非接触视觉检测单元运动,当扩口进入测量视野内时,激光发射器投射出的光源会在扩口内壁表面产生反射,反射的光线被相机接收。通过图像处理技术可以获取P 点的计算机图像坐标p~',通过标定可知相机内参数矩阵K 和激光系统方程系数,则联立式(2)~式(5),可以确定P 点在相机坐标系下的三维坐标,为下一步锥体建模和锥度计算提供点云数据。
2.2 基于点云噪声分类滤波的锥体建模
基于非接触视觉检测技术的扩口测量过程中,不可避免地会受到环境光、被测物表面强反射光等因素的干扰,造成测量数据出现噪声点,严重影响到点云分割、特征提取、曲面重建、误差分析等一系列的后续处理过程。因此,必须首先对点云噪声进行滤除。因为扩口锥面为连续曲面,投射到其上的激光曲线也应为连续的亮线,通常噪声的作用会产生两种效果:1)使激光边缘产生毛刺;2)在主体点云外产生小的局部亮点。两种情况都会导致激光条纹像素识别错误。基于错误识别的像素建立扩口椎体模型必然存在较大的误差,因此,必需对扫描的激光图像进行点云噪声滤波。
考虑不同干扰的作用效果不同,同一种滤波方法很难同时滤除两种干扰。为此,改进邻域聚类法对激光像素点进行分类,进而实现滤波。
令Si为第i 个点云集合,在未被标记的点云中任选一点为p,令p∈Si,设置邻域半径r,找到离p点最近的k 个点为
所有点都被标记后,得到n 个点云子集S1,S2,…,Sn。如果一个子集中点数过少,则该子集为孤立的局部亮点;如果一个子集的体积过小,则该子集为汇聚在一起的局部亮点。这些子集是前述第2)种噪声引起,都可以作为噪声从点云中去除。
针对第1)种噪声,在式(8)的基础上,将p 点也看成本身邻域中的点,得到点p 的第2)种邻域集合为

为反映邻域内点的变化特征,可计算协方差矩阵为



将扩口锥体看成一种二次空间曲面,其模型方程可一般化为

(x,y,z)为扩口锥体S 上某点p 的三维坐标,上式写成矩阵形式
根据滤波后的点云数据,采用最小二乘法拟合系数向量[c20c11c02c10c01c00],使得

取最小。此时对应的式(14)即为建立的锥体模型。
3 测量结果及误差分析
采用本文方法测量一种扩口航空导管锥角,如图4 所示。航空导管制造模具角度在72°~74°之间。经过线激光扫描,对点云数据采用最小二乘拟合,得到典型的端头锥面模型如图5 所示,能够反映扩口锥体特征。该界面主要分为参数设置、三维建模和测量结果及其误差分析3 个模块。参数设置可以插入、修改和删除检测标准,作为误差分析的参考值;三维建模直观显示所测型面的三维模型,如果航空导管满足精度要求,显示“OK”,否则显示“NO”。测量结果及其误差分析则给出定量的计算结果,点云数据的平均误差、最大误差等,方便用户掌握航空导管端头的加工信息。
图4 为对应锥角角度符合要求的航空导管,即锥角满足72°要求。为验证计算精度指标,采用三坐标机接触式测量的结果作为参考值,与本文方法比较,部分结果如表1 所示。可以看出本文非接触激光视觉方法与三坐标机测量结果的误差小于0.2°,精度符合要求,但一次性测量的时间小于30 s,与三坐标机小时级的测量时间相比极大地提高了工作效率。
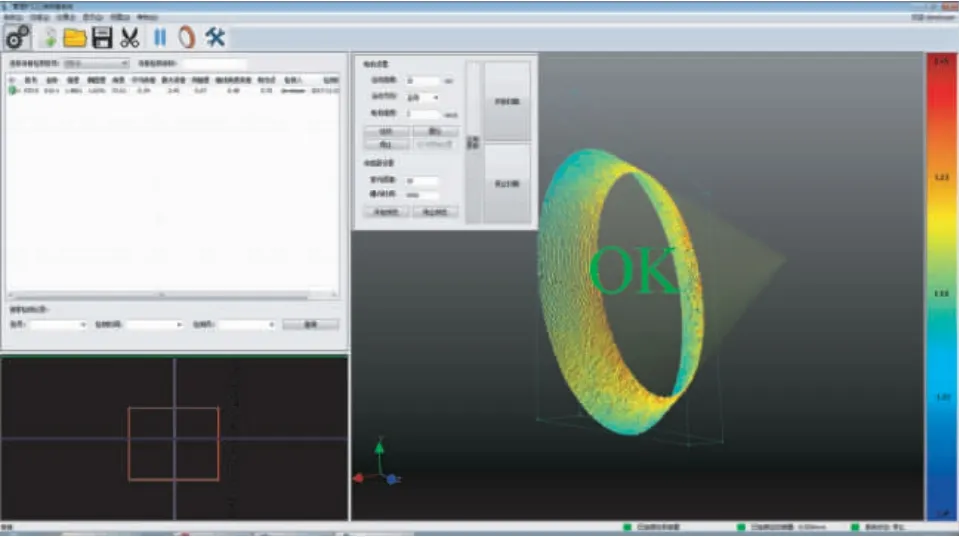
图4 航空导管扩口测量界面
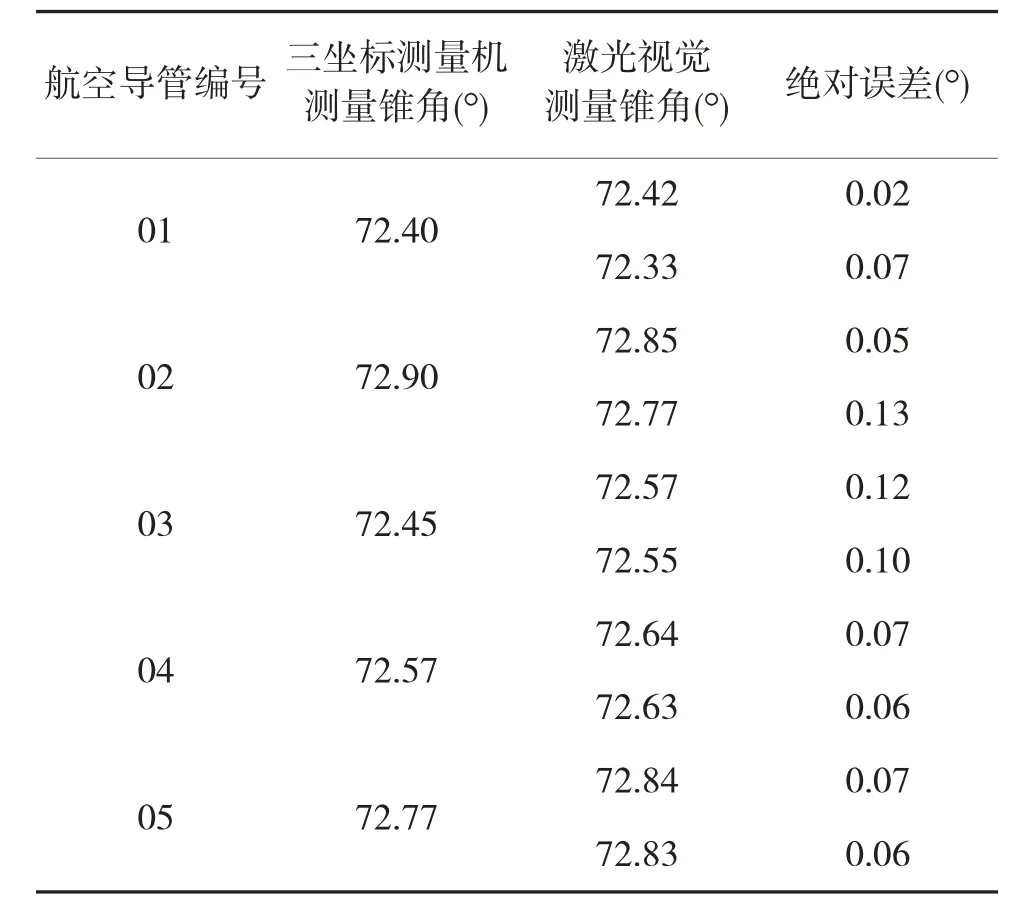
表1 扩口航空导管扩口角度测量结果
4 结论
本文设计了一个基于激光视觉技术的航空导管端头三维型面测量及建模系统。硬件主要包括伺服驱动机构和视觉测量单元。视觉测量是功能核心,伺服驱动是运动载体,二者结合保证视觉测量单元可以在一定范围内调整最佳视角,实现一定直径范围内的航空导管端头三维建模,完成精确、快速的测量提高航空导管端头加工质量的检测精度和效率。实验结果表明所建系统测量精度与三坐标机测量结果相近,但一次测量结果小于30 s,工作效率可得到极大提高。
