基于GPS 的智能驾驶汽车循迹控制研究
2019-11-06姚垠国段敏张恒郑苏
姚垠国,段敏,张恒,郑苏
(辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121000)
引言
循迹控制算法是小车实现自动行驶的关键,因而成为智能车领域的研究热点,GPS 循迹功能可以很大程度的减少驾驶员的疲劳,帮助驾驶员将车辆保持在期望轨迹上行驶,GPS用来检测车辆经纬度,将期望轨迹经纬度点信息存储到HMI中,在HMI 设定好车辆起点和终点后将经纬度信息传递给控制系统。控制系统接收到车辆经纬度信息后对比期望轨迹点,从而控制车辆的方向盘转角。
1 车辆动力学分析
研究车辆侧向控制时需要对车辆的侧向动力学特性做一些研究,汽车在行驶中,作为刚体它具有六个自由度,而在这里假定汽车只作平行于路面的平面运动。同时考虑了轮胎侧偏特性,即假定:汽车无垂直方向运动,无绕y 轴和x 轴的俯仰和侧倾运动;汽车作等速运动;忽略转向系统影响;不考虑左车轮由于载荷变化引起轮胎特性变化和回正力矩的作用,这样汽车就简化成两轮车的平面模型,成为一个具有侧向及横摆运动的二自由度计算模型。
1.1 GPS 循迹控制方法的选择
GPS 循迹控制的研究主要有以下几种:文献[1]采用PID控制器;文献[2]采用基于PID 进行改进的模糊PID 控制器有效地改善了汽车的弯道循迹性能,在保证最优循迹的前提下提高了智能汽车的通过弯道速度;文献[3]采用遗传法,文献[4]采用最优LQR 控制方法。文献[5]利用鲁棒 PID 控制器实现了某轮式机器人的循迹控制,通过实验对该控制方法的有效性进行了验证。文献[6]李以农等学者将滑模变结构非线性控制方法引入到汽车纵向控制中。在总结了国内外车辆驾驶员模型研究成果的基础上,本文采用单点预瞄以及最优控制这两种方法。
最优控制如下图:
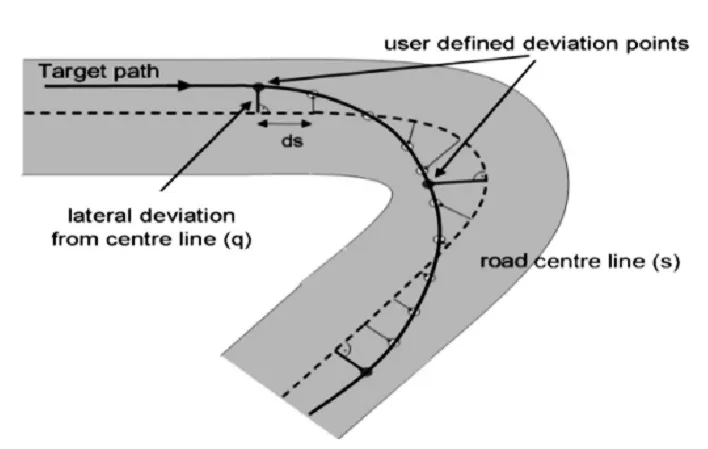
图1 最优控制示意图
2 建立GPS 循迹系统
目标路径最优控制方案:
由车辆二自由度模型,再加上最优控制的目标函数最小,可以推出最优控制规律。过程如下:
车辆运动状态空间方程:
状态向量:

输出向量:

解出:

,为各预瞄点的侧向偏差。
,为各预瞄点的权重。
出于计算效率以及鲁棒性等多方面的考虑,本方案最终采用了单点预瞄驾驶员模型,基于GPS 定位系统反馈回来的信号制作GPS 循迹控制。

图2 单点预瞄驾驶员模型
根据预瞄模型得到偏差方程:

基于实车标定得到合理的权重系数,最终实现兼顾舒适性和安全性的GPS 循迹系统。
3 采用实车进行测试
测试车速度:0~36dkm/h(±3km/h);
需采集的信号:车辆经度、纬度;
信号采样周期:>5ms;
试验开始条件:CANTest 可以正常接收IMU 发出的CAN总线信号;
停止条件:车辆沿预定轨迹重复行驶,直至满足试验要求次数。
实验结果如下:
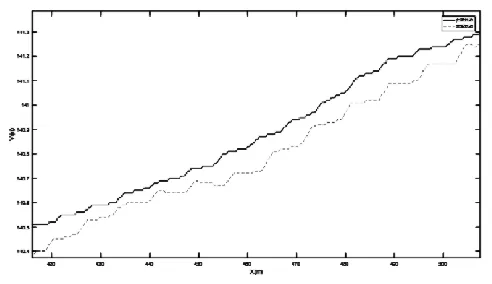
图3 车辆直线行驶时的实验结果
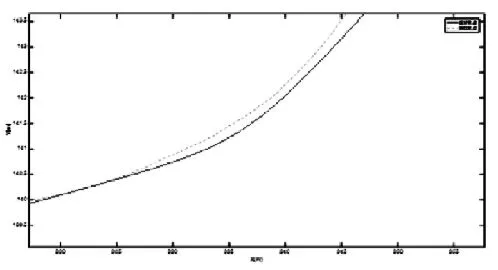
图4 车辆在小区率弯道行驶时的实验结果
4 实验结果分析
在实车GPS 循迹测试中发现,车辆直线跟踪时实时轨迹与目标轨迹重合度较好,跟踪误差小于10cm,在经过弯道时其误差在理想范围内。
5 结论
本文把车辆简化为二自由度模型,采用单点预瞄和最优控制方法,然后建立GPS 循迹系统,最后采用实车测试的方式验证控制方法和循迹系统的可靠性,为了分析采集的路径与车辆循迹过程中的误差,采用MATLAB 对采集路径的点以及实际循迹时车辆的运行轨迹进行拟合,绘制出采集的路径与实际循迹时轨迹的对比图,实验结果表明,本文采用的控制方法和建立的系统使车辆在直线和转弯行驶的过程中均可以把循迹误差控制在理想范围内。
