CCD连续转移下图像串扰问题的研究
2019-11-05申才立梁楠李鑫龚敬韩志学董龙
申才立 梁楠 李鑫 龚敬 韩志学 董龙
CCD连续转移下图像串扰问题的研究
申才立 梁楠 李鑫 龚敬 韩志学 董龙
(北京空间机电研究所,北京 100094)
为了提高遥感成像系统的调制传递函数(MTF),需要解决由于地面景物和CCD电荷移动不匹配带来的像移问题。在工程应用中,通常采用连续转移模式的电子补偿方法来解决这种问题。但是,当CCD工作在连续转移模式下时,会导致遥感图像中出现暗(亮)线,而且这种暗(亮)线会随着积分时间的变化而变化,在后期的图像校正中无法消除。针对此图像串扰问题,文章对串扰产生机理、串扰模式以及串扰因素的边界条件进行了分析。通过分析得出可通过调整时序驱动信号的上升/下降时间来降低图像串扰。在此基础上,文章提出了一种驱动滤波电路的硬件解决方案;然后,根据某工程应用CCD,文章对此电路进行了仿真与试验;通过对多组试验数据的对比分析,可知此驱动电路方案可根据需要调整上升/下降时间,从而实现降低图像串扰的目的。对图像数据进行分析后,文章提出将上升时间设置为时序信号周期的1/10,可将图像串扰降低到工程应用可接受的程度。
电荷耦合器件 调制传递函数 突发转移 连续转移 图像串扰航天遥感
0 引言
在高分辨率遥感系统成像中,为了提高图像的分辨率和品质,通常采用TDICCD或者面阵CCD工作在TDI模式下,这就要求CCD中电荷的转移速度和成像物体的移动速度要求同步。但是在实际的工作电路中,CCD中的电荷在垂直转移信号的驱动下,离散式地从一个像元转移到另一个像元,而与其对应的地面景物却是连续地从上一个像元转移到下一个像元,这就造成了局部的不同步,会造成系统调制传递函数(MTF)下降,这种地面景物与CCD电荷的不匹配称为像移[1-10]。
对于此类像移,目前采用的补偿方法主要有:光学式补偿、机械式补偿和电子式补偿。其中,光学式补偿和机械式补偿需要复杂、精密的光机结构和控制系统,对相机的体积质量以及复杂度都有所增加,而且也降低了相机的可靠性,所以在实际工程中通常采用电子式补偿方法[11-16]。传统的电子像移补偿方法是以电荷包为单位进行转移,具有较大的离散性。目前常用的是利用CCD自身多电极结构进行补偿的方法,通过修改CCD的驱动时序,使电荷的移动离散性达到最小值,大大减小非同步带来的影响,从而改善补偿效果[17-20]。而在CCD的成像过程中,根据不同的工作方式,CCD的垂直驱动时序可以分为突发转移模式和连续转移模式。其中,突发转移和连续转移的驱动时序如图1和图2所示(本文以四相转移为例)。其中,CI1~CI4为四相垂直转移驱动时序信号。CR为CCD的水平转移驱动时序信号。

图1 突发转移模式下的驱动时序图
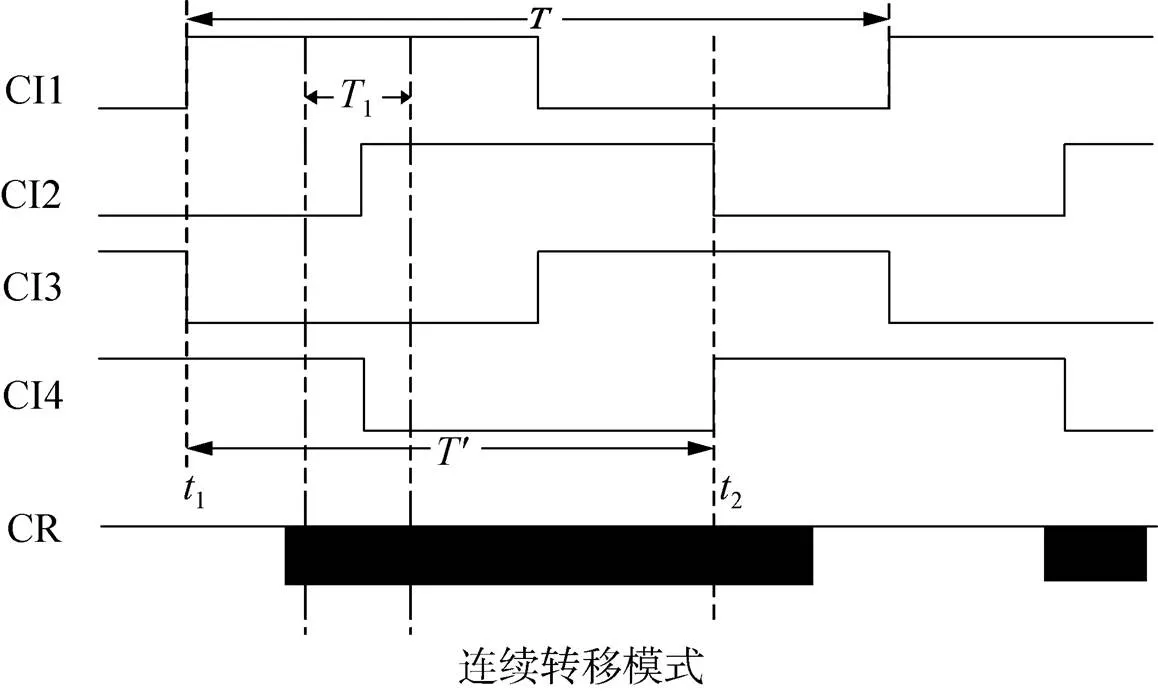
图2 连续转移模式下的驱动时序图
在突发转移模式下,CCD在1到2的时间内,迅速将像元中的电荷转移到下一个像元。而此转移时间′占整个行周期的比例非常小。在连续转移模式下,电荷沿运动方向的转移具有一定的连续性,它的几个时序驱动时序信号均匀地分布于一个行周期内。
根据文献[1],当采用突发转移的时候,CCD图像在运动方向上的MTF会降低,所以在工程应用中,通常是采用连续转移的方式。但在采用连续转移模式时,从图2中的驱动信号时序关系可以看出,CCD的垂直转移工作时序与水平转移工作时序就会有重叠,即垂直转移的上升/下降沿就会落在CCD的水平转移时序内。这种垂直转移驱动信号的上升/下降沿突变,对于正常的水平转移驱动信号会产生串扰。在信号波形上的现象就是水平转移信号上有毛刺,从而导致图像上出现暗(亮)线。而且这种暗(亮)线会随着CCD的积分时间变化而变化的,在后期图像处理中无法进行消除[21-25]。
本文针对CCD工作在连续转移模式下的这种图像串扰问题,提出了一种硬件电路的方法进行消除,并针对此方法进行了仿真和试验验证。
1 连续转移图像串扰
为了提高CCD成像的MTF,需要使CCD工作在连续转移的模式下,同时要消除连续转移带来的图像串扰。
1)串扰产生机理。由于CCD内部构造设计的原因,CCD内各个转移驱动电极之间的间隔很小。根据电磁干扰的相关理论,当CCD的垂直转移驱动信号和水平转移驱动信号同时存在时,即CCD工作在连续转移的模式下,两者的信号频率不同,那么垂直转移信号就会对水平转移信号产生干扰,从而造成光生电荷在水平转移时受到影响,反应在图像上,就是图像的暗(亮)线。
2)串扰模式分析。把垂直转移驱动信号看成是噪声源,而水平转移驱动信号作为敏感端。一般情况解决串扰问题,需要从以下三个方面进行分析:降低噪声源的噪声、对敏感端进行屏蔽以及对串扰路径进行优化隔离。由于CCD内部电路结构等原因,后两种方法在实际工程中很难应用,因此要采取降低噪声源噪声的方法。另外,根据试验测试,这些串扰的位置与垂直转移信号的上升/下降沿位置完全相关,而与电路及光强的变化等无关。所以,减小图像的串扰就需要设计合适的垂直转移信号上升/下降时间,使其对水平转移时序的影响尽可能的小。
3)串扰因素边界条件分析。为设计合适的垂直转移信号上升/下降时间,需要对其边界条件进行分析,下面分别从四个方面进行分析:
首先,从信号完整性的角度分析。实际信号都可以看成是由不同频率的正弦信号叠加而成。当叠加的正弦信号频率越高时,实际信号就表现为上升/下降时间更短。由相关理论可知,更高频率的信号更容易对其周围信号造成干扰,即信号的上升/下降时间越短,其作为噪声源对周围的干扰越大。所以从这个角度进行分析时,就要求垂直转移驱动信号的的上升/下降时间不能太短。
其次,根据CCD的工作原理,在CCD垂直转移信号变化过程中,光生信号电荷会随之移动。以图2为例,在CI2的上升时间内,即图中的1时间内,CI1所对应CCD电极势阱内的电荷会逐渐转移到到CI2对应的电极势阱内。而在这种电荷转移的末期主要是靠电子热能的热扩散和相邻电势差产生的边缘场漂移来驱动。这种转移需要一定的时间,若驱动信号的上升时间过短,会导致转移效率下降。而且,在实际制造的CCD中,因结晶缺陷等问题产生的抑制电子的阱能级,或者因为构造不均匀导致的电势偏差等都会导致转移时间变长。从这方面分析可知,CCD的驱动信号上升/下降时间不能太短。
再次,根据CCD转移劣化机制可知,在同样的CCD制造工艺等情况下,当信号电荷量增多时,就可以提高电荷的转移效率。所以为了保证尽可能多的信号电荷,满足一定的电荷转移效率,CCD通常会限制转移驱动信号的高(低)电平时间。而这样要求垂直转移驱动信号的上升/下降时间在周期中的占比不能太长,即上升/下降时间不能太长。
另外,在目前的工程应用中,为了满足图像高分辨率指标的要求,CCD的积分时间要求更短。这也导致CCD的垂直驱动信号频率越大,从而使垂直转移驱动信号的上升/下降时间更短。所以,这就限制了在实际工程应用中垂直转移信号的上升/下降时间不会太长。
综合以上分析,在工程应用中,要设计合适的垂直转移驱动信号波形来实现减小图像串扰的问题。在此基础上,本文提出了一种垂直转移时序驱动滤波电路,结合某工程应用CCD进行了仿真和试验,验证了该方法的有效性。
2 设计与仿真试验
(1)驱动滤波电路设计
根据相关分析可以知道,要想解决CCD图像串扰问题,此垂直转移驱动电路应具有一定的滤波功能,即能够调整驱动信号波形的上升/下降时间。其电路设计原理如图3所示。

图3 CCD时序驱动滤波电路图
图3中,0为驱动器的内阻;R为驱动器输出端串联的电阻;C为驱动器输出端串联的隔直电容;0为CCD管脚的等效容性负载;C为CCD输入端并联的滤波电容。根据电容充放电原理可知,工程应用中,此驱动信号的上升/下降沿时间近似为

根据电容充电时间公式,电容充电电压与时间有一定的函数关系。当电容充电达到90%时(通常信号上升时间选取90%处),在工程应用其时间系数可以取近似值2.3。
(2)仿真与试验
对此CCD的图像进行测量、分析,结果如图4所示(CCD像元分为16段分别输出)。从图4中可以看出,在每段中都出现一些明显的毛刺。根据实际验证,毛刺的位置与垂直转移驱动信号有关。图5为图像的灰度(DN)图,可以明显看到图像中的条纹。

图4 处理前CCD图像灰度(DN)值
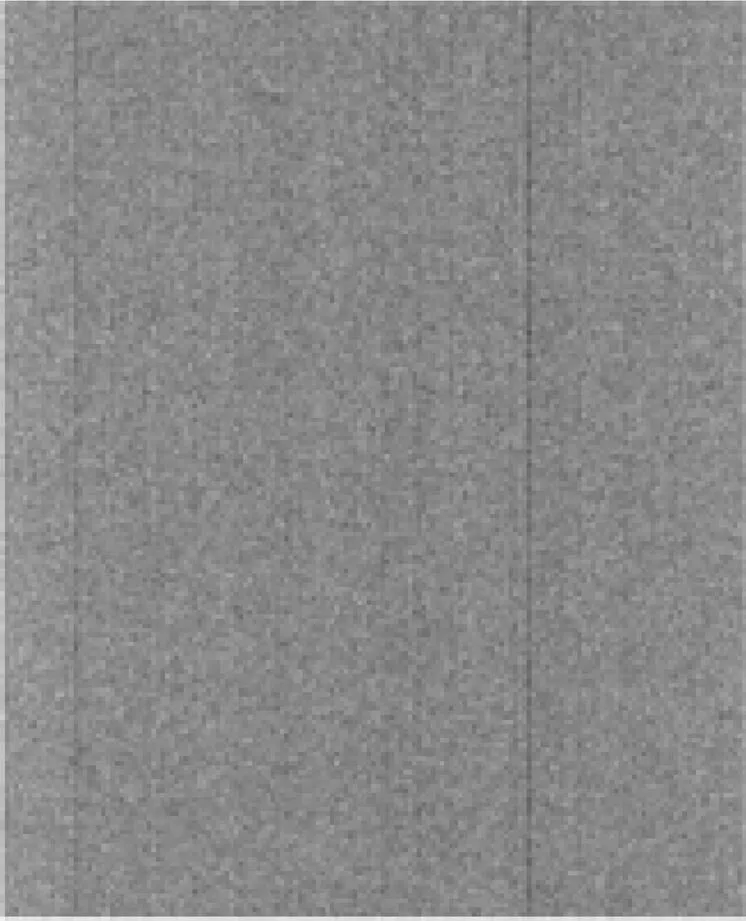
图5 处理前CCD图像灰度
根据前面的分析,针对此种情况,对驱动滤波电路进行调整,使上升/下降时间变长。继续测试几组值,发现当上升时间为8.4μs左右时,图像的串扰现象基本消失。继续增大上升时间,效果不明显。
实测上升时间为8.401μs时,再次对CCD的图像进行测量、分析,图像中的毛刺明显消除,灰度图中的条纹也没有了。其图像DN值如图6所示。
由前面的分析可知,为满足实际应用的需要等,需设计合适的垂直转移驱动上升时间。对几次试验的结果进行总结,其图像串扰量(DN值)与上升时间的关系如图7所示。其中图像的量化位数为12bit。
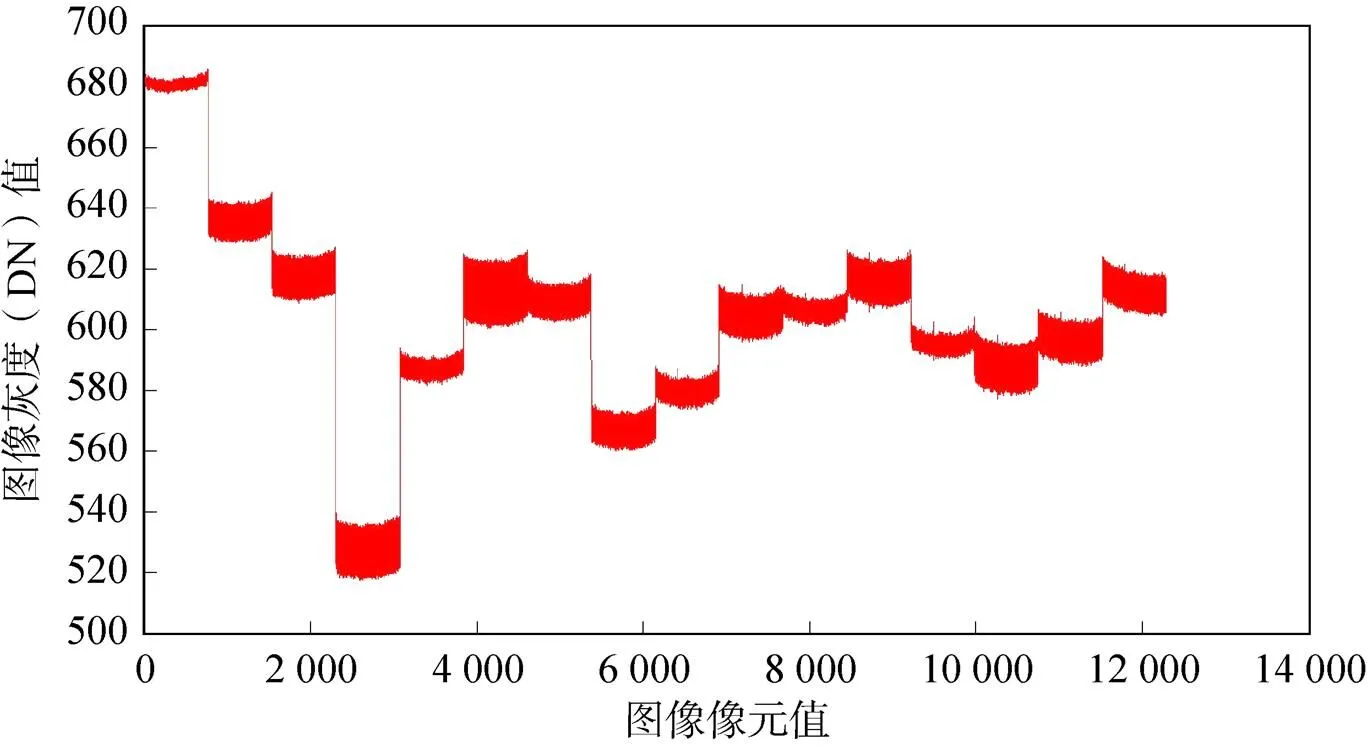
图6 处理后CCD图像灰度(DN)值

图7 图像串扰量与上升时间的关系
从图7中可以看出,当上升时间大于8.4μs时,继续增大上升时间,对消除图像串扰的作用有限。而且根据上面分析,为满足高分辨率图像的要求,以及保证驱动信号的高(低)电平在信号周期中的占比,通常不会使用过大的上升时间波形。
在具体应用时,参考此应用中CCD垂直驱动信号的周期时间为84μs,建议选取上升时间为周期的1/10左右,此时既能消除图像串扰,又能满足实际应用的需要。可根据式(1)调整电路中电阻电容参数来实现[上升时间/信号周期≈1/10],从而达到降低图像串扰噪声的目的。
3 结束语
本文对CCD工作在连续转移模式下的图像串扰问题进行了分析,提出了一种驱动滤波电路的硬件解决方案。从本文中的图像串扰降噪试验可以看出,通过调整上升时间,图像的串扰量从初始的DN值110降低到3,串扰可以降到工程应用可接受的程度。通过对比分析,本文给出了工程应用上该驱动电路调整参数的标准,即把上升时间调整为时序信号周期的1/10,这样就能达到满足工程需要的图像串扰量级。当然,在工程实践中,也有文章提出可采用软件来调整驱动信号波形或后期特定图像处理的方案来解决该图像串扰问题。针对具体应用可以采用多种方案相结合,从而达到理想的降低串扰目的,这个可以作为以后的研究方向。
[1] 董龙, 梁楠. CCD连续转移技术研究[J]. 航天返回与遥感, 2015, 36(3): 33-39. DONG Long, LIANG Nan. Research of CCD Sequential Transfer Technology[J]. Spacecraft Recovery & Remote Sensing, 2015, 36(3): 33-39. (in Chinese)
[2] WULICH D, KOPEIKA N S. Image Resolution Limits Resulting from Mechanical Vibrations[J]. Optical Engineer, 1987, 26(6): 529-533.
[3] 李晓云, 杜伟. 星载TDICCD 相机像移对成像质量的影响分析[J]. 航天器工程, 2011, 20(3): 51-55. LI Xiaoyun, DU Wei. Analysis of Image Motion Effect on Satellite TDICCD Camera Image Quality[J]. Spacecraft Engineering, 2011, 20(3): 51-55. (in Chinese)
[4] 王栋, 潘卫军, 李涛. 帧转移面阵CCD电子像移补偿设计[J]. 航天返回与遥感, 2009, 30(3): 42-49. WANG Dong, PAN Weijun, LI Tao. Design of Image Motion Compensation in Electronics of Frame Array CCD[J]. Spacecraft Recovery & Remote Sensing, 2009, 30(3): 42-49. (in Chinese)
[5] 丁福建, 李英才. CCD相机象移的补偿[J]. 光子学报, 1998, 27(10): 948-951. DING Fujian, LI Yingcai. Forward Motion Compensation of CCD Camera by Means of Computer Software[J]. Acta Photonica Sinica, 1998, 27(10): 948-951. (in Chinese)
[6] 李清军. 面阵CCD 相机像移补偿技术[J]. 计算机测量与控制, 2008, 16(12): 1951-1953. LI Qingjun. IMC Technology of the Area Scan CCD Camera[J]. Computer Measurement & Control, 2008, 16(12): 1951-1953. (in Chinese)
[7] 刘光林, 杨世洪, 吴钦章. 一种基于CCD多电极结构的电子像移补偿方法[J]. 光电子·激光, 2008, 19(7): 947-951. LIU Guanglin, YANG Shihong, WU Qinzhang. An Image Motion Compensation Method Based on Uultiphase CCD[J]. Journal of Optoelectronics·Laser, 2008, 19(7): 947-951. (in Chinese)
[8] 齐怀川, 黄巧林, 胡永力. 空间光学遥感运动模糊仿真方法研究[J]. 航天返回与遥感, 2010, 31(2): 51-56. QI Huaichuan, HUANG Qiaolin, HU Yongli. The Study about the Means of Simulation for the Motion Blurred of Space Optical Remote Sensing[J]. Spacecraft Recovery & Remote Sensing, 2010, 31(2): 51-56. (in Chinese)
[9] 成桂梅, 吴淞波, 李强, 等. 星载遥感CCD相机高性能时序发生器的研制[J]. 航天返回与遥感, 2014, 35(1): 46-53. CHENG Guimei, WU Songbo, LI Qiang, et al. Development of High-performance Timing Generator for Remote Sensing CCD Camera on Satellite[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(1): 46-53. (in Chinese)
[10] 刘光林, 杨世洪, 吴钦章, 等. 高分辨率全帧CCD相机电路系统的设计[J]. 中国科学院研究生院学报, 2007, 24(3): 320-324. LIU Guanglin, YANG Shihong, WU Qinzhang, et al. Design of High Resolution Camera System Based on Full Frame CCDs[J]. Journal of Gradute Univesity of Chinese Academy of Sciences, 2007, 24(3): 320-324. (in Chinese)
[11] 雷宁, 刘苗, 李涛. TDI CCD 像元响应不一致性校正算法[J]. 光学技术, 2010, 36(1): 86-92. LEI Ning, LIU Miao, LI Tao. TDI CCD Non-uniformity Correction Algorithm[J]. Optical Technique, 2010, 36(1): 86-92. (in Chinese)
[12] 董龙, 李涛. 面阵CCD时序抗弥散方法研究[J]. 航天返回与遥感, 2012, 33(6): 86-92. DONG Long, LI Tao. Research of Area CCD Clock Antiblooming Method[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(6): 86-92. (in Chinese)
[13] 张保贵, 张宇烽. 空间CCD相机辐射校正算法分析[J]. 航天返回与遥感, 2014, 35(1): 91-96. ZHANG Baogui, ZHANG Yufeng. Analysis of Relative Radiometric Calibration Algorithm of Space CCD Camera[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(1): 91-96. (in Chinese)
[14] 陶家生. 像移和采样共同作用下的TDICCD 探测器像质[J]. 光电工程, 2005, 32(8): 52-55. TAO Jiasheng. Study on the Imaging Quality of TDICCD Sensor Under Image Motion and Sampling Effect[J]. Opto-electronic Enineering, 2005, 32(8): 52-55. (in Chinese)
[15] 童子磊. CCD相机的像移补偿技术[J]. 激光与红外, 2005, 35(9): 628-632. TONG Zilei. Compensation Technology for the Image Motion of CCD Camera[J]. Laser & Infrared, 2005, 35(9): 628-632. (in Chinese)
[16] 商小川. 基于FPGA的超高像素CCD驱动系统设计[D]. 长春: 中国科学院长春光学精密机械与物理研究所, 2010. SHANG Xiaochuan. Design of FPGA-based Ultra-high-pixel CCD Driving System[D]. Changchun: Institute of Optics, Fine Mechanics and Physics, CAS, 2010. (in Chinese)
[17] 刘则洵, 全先荣. CCD相机输出非均匀性线性校正系数的定标[J]. 红外与激光工程, 2012, 41(8): 2211-2215. LIU Zexun, QUAN Xianrong. Calibration of CCD Cameras Output Non-uniformity Linear Corrected Coefficient[J]. Infrared and Laser Engineering, 2012, 41(8): 2211-2215. (in Chinese)
[18] 刘光林, 杨世洪, 吴钦章. 高分辨率大面阵CCD相机的高帧频设计[J]. 半导体光电, 2007, 28(5): 735-738. LIU Guanglin, YANG Shihong, WU Qinzhang. Design for High Resolution CCD Camera with High Frame Rate[J]. Semiconductor Optoelectronics, 2007, 28(5): 735-738. (in Chinese)
[19] 王治乐, 庄绪霞, 张兰庆. 动态MTF的数值计算与分析[J]. 光学技术, 2011, 37(5): 590-596. WANG Zhile, ZHUANG Xuxia, ZHANG Lanqing. Numerical Calculation and Analysis of Dynamic MTF[J]. Optical Technique, 2011, 37(5): 590-596. (in Chinese)
[20] 付强, 相里斌, 景娟娟. 基于多光谱遥感成像链路模型的系统信噪比分析[J]. 光学学报, 2012, 32(2): 0211001. FU Qiang, XIANG Libin, JING Juanjuan. System Signal-to-noise Ratio Analysis Based on Imaging Chain Model in Multispectral Remote Sensing[J]. Acta Optica Sinica, 2012, 32(2): 0211001. (in Chinese)
[21] 马骏, 李少毅, 孙力, 等. CCD驱动电路设计对航空相机成像质量的影响分析[J]. 测控技术, 2011, 30(3): 5-7. MA Jun, LI Shaoyi, SUN Li, et a1. Analysis of the Interaction between CCD Driving Circuit Design and Image Quality[J]. Measurement and Control Technology, 2011, 30(3): 5-7. (in Chinese)
[22] 黄文林, 扬光永, 胡国清. 基于CPLD和Verilog的高精度线阵CCD驱动电路设计[J]. 科学技术与工程, 2012, 12(30): 8052-8057. HUANG Wenlin, YANG Guangyong, HU Guoqing. The Design of a High Accuracy Linear Array CCD Driving Circuit Based on CPLD and Verilog[J]. Science Technology and Engineering, 2012, 12(30): 8052-8057.(in Chinese)
[23] 黄彤津, 朱礼尧, 迟涵文, 等. 基于CPLD 的线阵CCD驱动电路的设计[J]. 电子测量技术, 2014, 37(7): 66-70. HUANG Tongjin, ZHU Liyao, CHI Hanwen, et al. Design of a Linear Array CCD Drive Circle Based on CPLD[J]. Electronic Measurement Technology, 2014, 37(7): 66-70.(in Chinese)
[24] 薛旭成, 李洪法, 郭永飞. 高速CCD 成像电路抗串扰技术[J]. 中国光学, 2011, 4(6): 611-616. XUE Xucheng, LI Hongfa, GUO Yongfei. Anti-crosstalk Techniques for High-speed CCD Imaging Circuit[J]. Chinese Optics, 2011, 4(6): 611-616. (in Chinese)
[25] 张达, 李巍. 高集成度多光谱TDI CCD焦平面系统[J]. 红外与激光工程, 2016, 45(10): 1018006. ZHANG Da, LI Wei. Highly Integrated Multi-spectral TDI CCD Focal Plane System[J]. Infrared and Laser Engineering, 2016, 45(10): 1018006. (in Chinese)
Research on Image Crosstalk in CCD Sequential Transfer Mode
SHEN Caili LIANG Nan LI Xin GONG Jing HAN Zhixue DONG Long
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
In order to improve the MTF of remote sensing imaging system, it’s necessary to solve the image shift problem caused by the mismatch between ground scene and CCD charge movement. In engineering applications, the electronic compensation method in continuous transfer mode is usually adopted to solve this problem. However, when the CCD works in the continuous transfer mode, it will lead to dark (or bright) lines in remote sensing images, which will change with the integration time variation, and cannot be eliminated in the later image correction. Aiming at image crosstalk problem, the mechanism mode and boundary conditions are analyzed. Through analysis, it is concluded that image crosstalk can be reduced by adjusting the rising/falling time of timing driving signals. On this basis, a hardware solution of driving filter circuit is proposed. Then, for a CCD in engineering application, the circuit is simulated and tested. Through the comparison of multiple experimental data, it can be seen that the driving circuit scheme can adjust the rising/falling time accordingly, thus reducing image crosstalk. After analyzing the image data, the paper proposes to set 1/10 of the time series signal period as the rising time, which can reduce the image crosstalk to an acceptable level in engineering application.
charge coupled device; modulation transfer function; abrupt transfer; sequential transfer; image crosstalk; space remote sensing
TP212
A
1009-8518(2019)05-0050-08
申才立, 梁楠, 李鑫, 等. CCD连续转移下图像串扰问题的研究[J]. 航天返回与遥感, 2019, 40(5): 50-57.
SHEN Caili, LIANG Nan, LI Xin, et al. Research on Image Crosstalk in CCD Sequential Transfer Mode[J]. Spacecraft Recovery & Remote Sensing, 2019, 40(5): 50-57. [DOI: 10.3969/j.issn.1009-8518.2019.05.005]
申才立,男,1988年出生,2015年获得中国空间技术研究院飞行器设计专业硕士学位,工程师。研究方向为航天遥感电子技术。E-mail:357370654@qq.com。
2019-04-19
国家重点研发计划地球观测与导航重点专项(2016YFB0500802)
(编辑:王丽霞)
