水空两栖太阳能四旋翼气动特性研究
2019-11-04阮永井王琦邹森陈金铭
阮永井,王琦,邹森,陈金铭
(1.南昌航空大学 通航学院,南昌 330063) (2.南昌航空大学 飞行器工程学院,南昌 330063)
0 引 言
太阳能无人机具有十分广阔的应用前景,自第一架太阳能固定翼无人机Sunrise成功试飞以来,世界上许多国家和组织都竞相对太阳能无人机展开了研究[1]。四旋翼飞行器较之传统的飞行器,具有体积较小、噪声小、隐蔽性强、机动灵活和具有悬停能力等特点,成为无人机领域的研究热点之一[2-3]。太阳能四旋翼无人机结合了太阳能飞行器和四旋翼飞行器的优势,近年来也引起了国内外的广泛关注。目前,国内已对太阳能多旋翼飞行器以及多螺旋桨太阳能无人机进行了设计研究与优化[4-7]。国外,2017年,R.D’Sa等[8]设计了可变形太阳能无人机,并对其进行了试飞和实验;2018年,N.Kingry等[9]设计了一种结合了太阳能收集能力的大型四轴飞行器,建立其动力学模型,并分析了空气动力学的影响。
但是国内外对于水空两栖多功能太阳能四旋翼飞行器的研究甚少。特别是针对江河湖泊中需要执行长时间、远距离的水样采集及水质监测等任务时,普通无人飞行器无法满足要求。因此,需要设计一种既可以在空中飞行,又能在水面上漂浮起降和航行的多功能太阳能飞行器。
飞行器在设计制作的过程中需要进行气动计算和流体仿真,而结合了经典流体力学、离散化数值计算理论和电子计算机技术的计算流体力学正符合这一要求[10]。整机气动特性的计算分析是飞行器性能分析和优化设计的基础,也是飞机总体设计的一个关键环节[11]。
对于新型太阳能四旋翼飞行器,由于太阳能板的存在,旋翼的安装高度和轴距会对整机的气动效能产生影响。本文在该新型飞行器总体设计方案的基础上,利用XFlow CFD软件对旋翼及飞行器整体流场进行非定常数值模拟,并分析该飞行器的气动特性,通过综合优化飞行器的气动及结构参数,有效扩展飞行航时和航程,以期为该类型飞行器今后的研究工作提供理论依据。
1 设计方案及物理模型
1.1 设计方案
新型水空两栖飞行器结合了太阳能飞行器、四旋翼飞行器和船舶航行器三者的优势,利用电池和太阳能板混合供电,可在空中飞行,亦可在水面上漂浮起降航行。四个旋翼在调节飞行器飞行姿态的同时提供飞行器的飞行、悬停和起降动力,四个浮筒为飞行器提供水上漂浮所需的浮力。同时,飞行器底部安装有船舶推进式螺旋桨,可为飞行器在水面上提供航行动力,提高水上的机动性能。这极大地拓展了四旋翼无人机的工作范围。新型水空两栖四旋翼飞行器如图1所示。
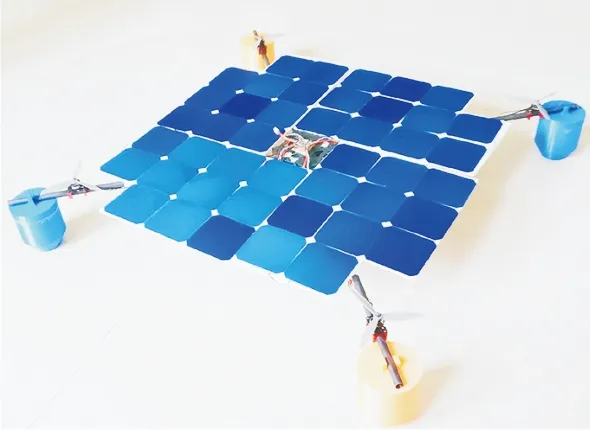
图1 新型水空两栖四旋翼飞行器Fig.1 New water-air amphibious four-rotor vehicle
该设计方案利用锂电池和太阳能混合供电,克服了普通四旋翼航程短、续航时间短的缺点,利用浮筒和船舶螺旋桨实现了飞行器在水面上漂浮、起降、航行等功能。该新型飞行器采用模块化设计,分为太阳能电池板模块、电能控制模块、飞行平台模块、浮筒模块和飞行控制系统模块。模块化结构可最大程度上减轻自重,提高该无人机的负载能力和飞行稳定性。各模块功能独立,相互之间又具有良好的兼容性,从而实现一机多用。以体积小、质量轻、转换效率高的单晶硅太阳能片作为动力能量来源,并采用独特的封装、铺设技术,可高效、稳定、长时间的为无人飞行器提供动力,有效克服了现有垂直起降无人飞行器续航时间不足,留空时间短等问题。
1.2 物理模型
光电混合水空两栖飞行器的三维模型如图2所示。主要结构包括机架、太阳能电池板、电驱动螺旋桨、防水电机、浮筒、船舶推进式螺旋桨。
在实际仿真计算中,针对研究问题的不同,将物理模型进行不同程度的简化[9,12]。本文中,由于旋翼在提供升力的同时,会产生向下的气流——下洗流。当旋翼轴距较短时,下洗流会冲击太阳能板,影响旋翼的气动性能,甚至旋翼之间也会产生气动干扰。

图2 新型飞行器设计三维图Fig.2 3D illustration of a new aircraft design
因此,在总体方案的基础上(保证太阳能板的形状不变,旋翼转速不变,为3 000 r/min,各旋翼的旋转方向如图3所示),需要研究旋翼的安装距离(半轴距R)、安装高度(H)对整机气动效能的影响,并根据计算结果确定旋翼的安装方式。将物理模型进行简化,如图4所示。
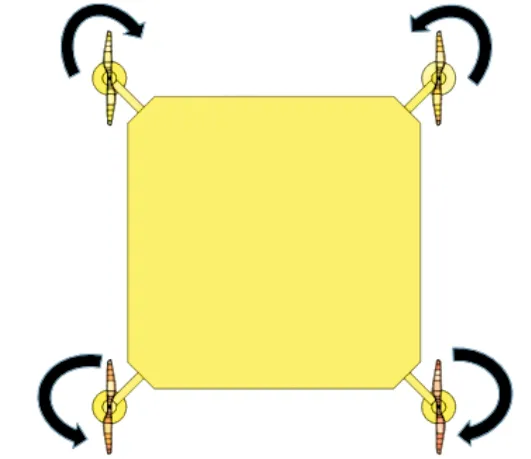
图3 各旋翼旋转方向Fig.3 Rotation direction of each rotor
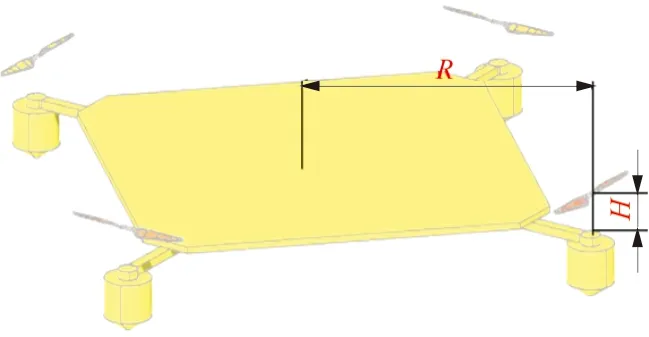
图4 简化后的仿真模型Fig.4 Simplified simulation model
为了方便开展研究和建立气动模型进行仿真计算,进行如下假设[12]:
(1) 仿真计算时,前方自由来流是均匀和稳定的;
(2) 在受到力的作用时,不考虑太阳能板和浮筒的结构和弹性形变;
(3) 四旋翼的桨叶均默认为刚性元件,不发生任何弹性形变。
2 数值仿真计算
通过CATIA软件建立简化后的物理模型。为了准确预测该飞行器的飞行性能,应用CFD模拟获得空气动力学特性。 在数值模拟实验中,可以从流体流动的反应中进一步观察模型的性质。在这项工作中,通过XFlow CFD软件来模拟整机的三维物理条件,并获得仿真结果。
2.1 XFlow CFD概述
XFlow CFD软件用于使用Lattice-Boltzmann方法模拟与时间相关的流体流动问题。XFlow基于最先进的LBM解决方案,采用一种专有的基于粒子的动力学求解器。此外,它采用LES湍流建模方法,并结合壁面的普遍规律,即壁面修正大涡模拟(Wall-Modified Large Eddy Simulation,简称WMLES)。格子-玻尔兹曼方法离散了粒子概率分布函数的演化方程——连续玻尔兹曼方程。从玻尔兹曼输运方程出发,利用查普曼-恩斯科格展开式,可以得到可压缩的纳维-斯托克斯方程。由于这种灵活的基于粒子的方法,避免了传统的网格划分过程,极大地加快了离散化阶段(降低了工程成本),并使复杂几何图形的计算以一种直观的方式变得可承受[13]。在本文中,XFlow软件在建模运动部件(旋翼)时的独特优势(无论是固定的还是自适应的细化)是其使用中的重要因素。
2.2 湍流模型
用于湍流建模的方法是大涡模拟(LES)。该方法引入了额外的粘度,称为湍流涡粘度Vt,以模拟亚格子湍流。采用的LES方案是壁面自适应的局部涡流粘度模型,该模型提供了一致的局部涡流粘度和近壁面行为[14]。具体方程为
(1)
(2)
(3)
(4)
式中:Δf=CwΔx,为滤波尺度;S为分解尺度的应变速率张量;常数Cw一般取0.325。
采用考虑不利和有利压力梯度影响的广义壁面定律建立边界层模型[11],具体方程为
(5)
(6)
uc=uτ+up
(7)
(8)
(9)

2.3 模型及参数设置
首先在CATIA中建立所需要的模型,再将模型以文件格式(例如STEP或STL)导出并导入到XFlow。模拟的飞行器旋翼直径为355.4 mm,以标称悬停转速3000 r/min建模。 标称尖端弦长为23.8 mm,尖端速度为55.8 m/s。模型及参数设置参考文献[15],四个旋翼分别作为单独的对象导入,因为它们需要设置为旋转模式。仿真设置采用自适应分辨率情况,具体如下:
使用自适应细化的分辨率是在模型中的每个对象(机身和四个旋翼)上设置目标分辨率,并在各个对象上设置分辨率。 定义了五个圆柱形细化区域,其中四个围绕旋翼,一个围绕整个飞行器,如图5所示。每个旋翼区域直径为200 mm,高度为40 mm,设置为使用4 mm的分辨率,相当于16.8%的尖端弦长。较大的圆柱形区域包围整个飞机,直径1 200 mm,高350 mm,该区域的分辨率设置为4 mm,远场分辨率为512 mm。在这种情况下,机身目标分辨率设置为4 mm,四个旋翼中的每一个都为2 mm。此外,使用尾流距离控制,设定为350 mm,超过该范围,解决方案将不再适应性细化。
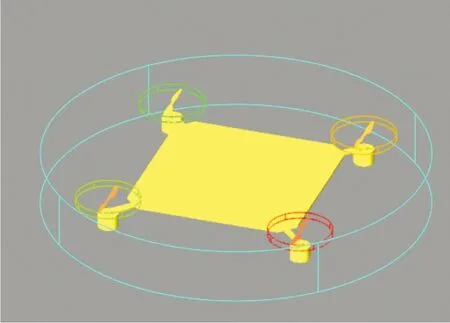
图5 圆柱形细化区域设置Fig.5 Cylindrical refinement area setting
3 算例验证
为了验证计算方法的准确性,首先对单个旋翼进行地面静态拉力测试,测量螺旋桨性能试验的设备如图6所示,该方法可以直接测得螺旋桨在不同转速下的拉力。验证试验采用SAIL赛朗166正桨,在CATIA中建立相应的三维模型,并导入XFlow中进行仿真计算 ,并且将仿真数据与试验数据结果进行对比。

图6 螺旋桨性能测量装置Fig.6 Propeller performance measuring device
数值仿真与试验的数据结果如图7所示。
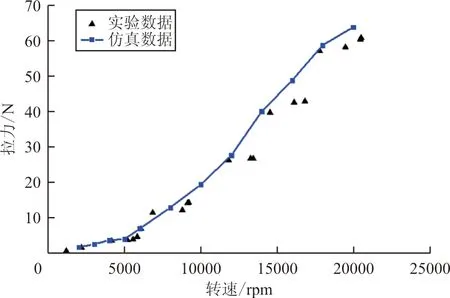
图7 不同转速下螺旋桨的拉力图Fig.7 Pulling force diagram of the propeller at different speeds
从图7可以看出:拉力的仿真计算结果与试验结果吻合良好,最大误差不超过9%,表明本文数值仿真所使用的计算方法较为可靠、结果可信。
4 仿真计算结果与分析
4.1 太阳能板对飞行器整机升力的影响
为了研究有无太阳能板对飞行器整机升力的影响规律,建立相同高度(H=75 mm),不同轴距(R)下,有太阳能板和无太阳能板的模型。采用上述数值仿真方法,在无来流速度、旋翼转速为3 000 r/min的条件下,对上述模型进行数值仿真计算,得到有无太阳能板飞行器整机升力随轴距变化的趋势,如图8所示。
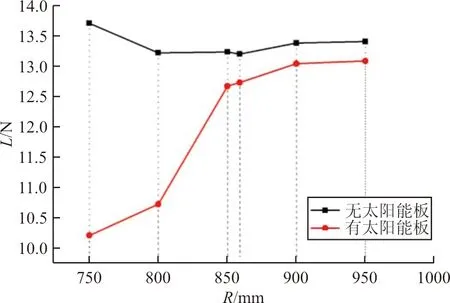
图8 有无太阳能板整机升力随轴距的变化Fig.8 Whether there is a change in the lift of the whole plate with the wheelbase
从图8可以看出:轴距过短时,板的存在对整机升力的影响较大,升力的变化趋势较大;当半轴距大于900 mm后,板对整机升力的影响减小,升力的变化趋势也减小。原因主要是轴距较短时,由于太阳能板的存在,旋翼产生的下洗流冲击在板上,对整机的气动性能产生干扰;当轴距增大至旋翼的下洗流避开太阳能板,使得气流干扰减弱,整机升力增加。
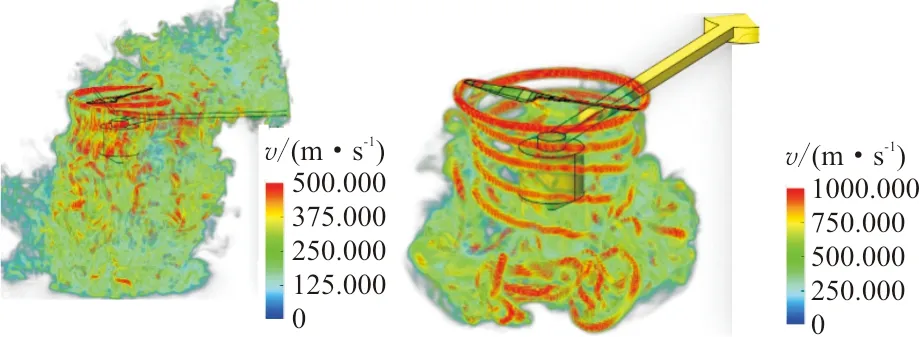
为了更加准确地观察云图,根据模型的对称性统一截取模型的1/4进行分析。旋翼的安装高度H=75 mm,半轴距R=750和R=900 mm情况下的速度云图如图9所示,对应的涡量云图如图10所示。
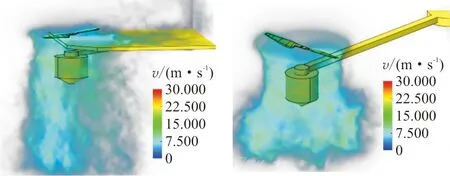
(a1) 有太阳能板 (a2) 无太阳能板
(a)H=75 mm,R=750 mm
(b1) 有太阳能板 (b2) 无太阳能板
(a)H=75 mm,R=900 mm
图9 速度云图
Fig.9 Speed cloud
(a1) 有太阳能板 (a2) 无太阳能板
(a)H=75 mm,R=750 mm
(b1) 有太阳能板 (b2) 无太阳能板
(a)H=75 mm,R=900 mm
图10 涡量云图
Fig.10 Vorticity cloud
4.2 旋翼不同安装位置对飞行器整机升力的影响
旋翼在提供升力的同时,会产生向下的下洗流。当旋翼轴距较短时,下洗流冲击太阳能板,影响旋翼的气动性能,甚至旋翼之间也产生气动干扰。因此,在总体方案的基础上(保证太阳能板的形状不变,旋翼转速为3 000 r/min),需要研究旋翼的安装距离(半轴距R)、旋翼的安装高度(H)对整机气动效能的影响。从而确定旋翼气动效能较好的安装方式。为此建立旋翼不同安装高度、轴距的模型,通过Xflow软件进行数值仿真。得到旋翼不同安装位置的整机升力的变化,如图11所示。
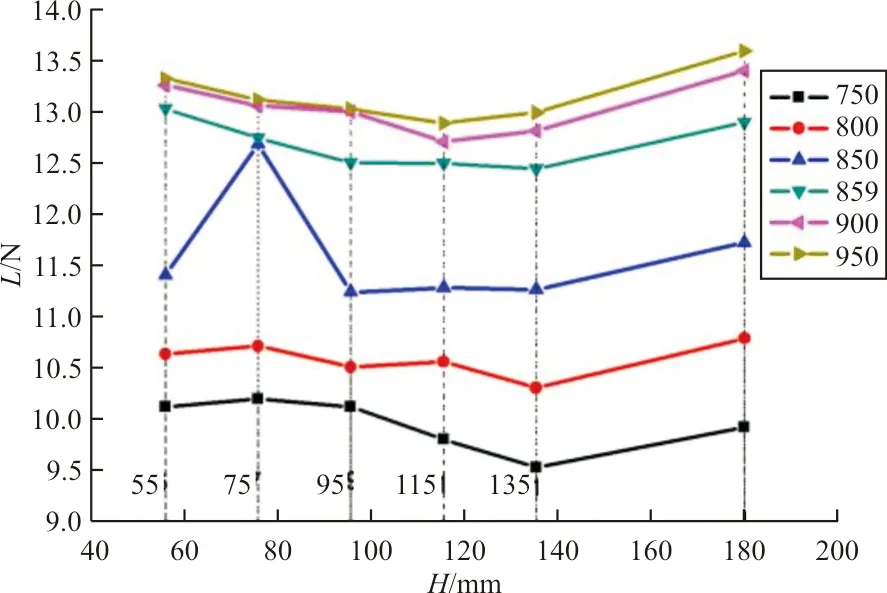
图11 旋翼不同安装位置的整机升力Fig.11 Overall lift of the rotor in different installation positions
从图11可以看出:旋翼安装高度对整机升力的影响较小;轴距对整机升力的影响较大,轴距越大整机的升力越大,其主要原因是旋翼产生的下洗流冲击在板上,对整机干扰较大。
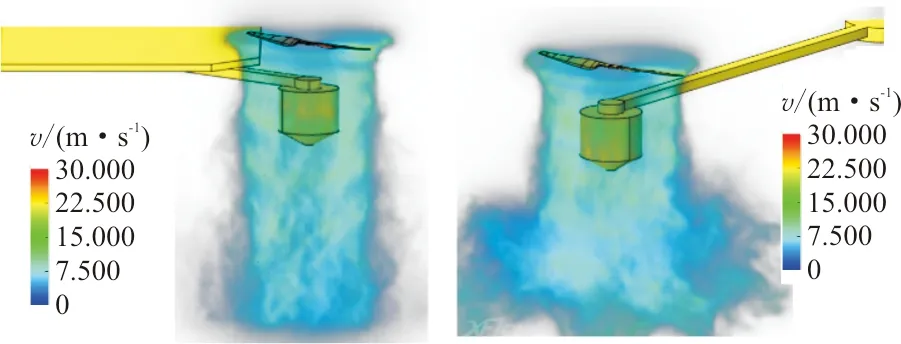
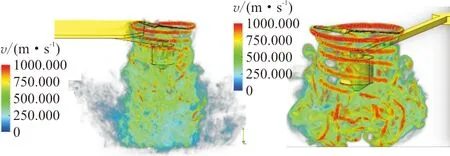
但是当R=850 mm、H=75 mm时,整机升力出现一个突变。R=850 mm、H=75 mm的速度流场图和涡量流场图分别如图12~图13所示,可以看出:旋翼产生的下洗流会先略微收缩,在此高度下气流刚好避开了太阳能板,使得气流干扰减弱,整机升力增加。

图12 R=850 mm、H=75 mm速度流场图Fig.12 R=850 mm、H=75 mm speed flow field diagram
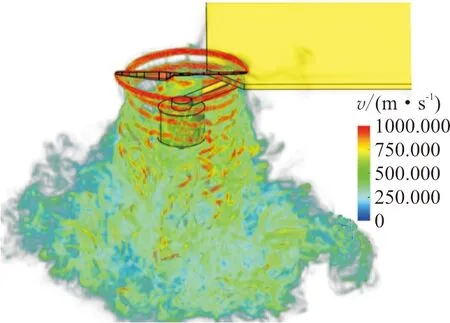
图13 R=850 mm、H=75 mm涡量流场图Fig.13 R=850 mm、H=75 mm vortex flow field diagram
5 结 论
(1) 旋翼高度对整机升力的影响较小,旋翼的安装轴距越大整机的升力越大,主要原因是轴距较小时,旋翼产生的下洗流冲击在太阳能板上,对整机产生气动干扰。
(2) 旋翼下洗流存在一收缩区,充分利用该收缩区,有利于减小无人机尺寸,同时保持最大升力。
针对旋翼下洗流存在的收缩区,在后期工作中可以研究不同转速,不同旋翼的下洗流的收缩量,以期为相关旋翼类飞行器的气动优化提供参考。
