A review:On path planning strategies for navigation of mobile robot
2019-10-31PatlGanshBauAnishPanyParhiJagash
B.K.Patl ,Gansh Bau L ,Anish Pany ,D.R.K.Parhi ,A.Jagash
a Department of Mechanical Engineering,CVR College of Engineering,Hyderabad,India
b Department of Mechatronics Engineering,Tishik International University,Erbil,Iraq
c Department of Mechanical Engineering,KITS University Bhubaneshwar,India
d Department of Mechanical Engineering,NIT Rourkela,India
e Department of Mechanical Engineering,KL University,Guntur,India
Keywords:Mobile robot navigation Path planning Classical approaches Reactive approaches Artificial intelligence
A B S T R A C T This paper presents the rigorous study of mobile robot navigation techniques used so far.The step by step investigations of classical and reactive approaches are made here to understand the development of path planning strategies in various environmental conditions and to identify research gap.The classical approaches such as cell decomposition(CD),roadmap approach(RA),artificial potential field(APF);reactive approaches such as genetic algorithm(GA),fuzzy logic(FL),neural network(NN),firefly algorithm(FA),particle swarm optimization(PSO),ant colony optimization(ACO),bacterial foraging optimization(BFO),artificial bee colony(ABC),cuckoo search(CS),shuffled frog leaping algorithm(SFLA)and other miscellaneous algorithms(OMA)are considered for study.The navigation over static and dynamic condition is analyzed(for single and multiple robot systems)and it has been observed that the reactive approaches are more robust and perform well in all terrain when compared to classical approaches.It is also observed that the reactive approaches are used to improve the performance of the classical approaches as a hybrid algorithm.Hence,reactive approaches are more popular and widely used for path planning of mobile robot.The paper concludes with tabular data and charts comparing the frequency of individual navigational strategies which can be used for specific application in robotics.
1. Introduction
Initially, the application of a mobile robot was limited to manufacturing industries only.But nowadays,it is commonly used in the fields of entertainment,medicine,mining,rescuing,education,military,space,agriculture and many more.While performing the task of navigation,the robot is equipped with many intelligent equipments which are required to model the environment and localize its position,control the motion,detect obstacles,and avoid obstacles by using navigational techniques.Safe path planning(by detecting and avoiding the obstacles)from the initial position to the target position is the most important function of any navigational technique.Therefore,the proper selection of the navigational technique is the most important step in the path planning of a robot when working in a simple and complex environment.At present,many techniques have been developed by various researchers in the field of mobile robot navigation and it is the most researched topic of today.Mobile robot navigation is classified into three categories:global navigation,local navigation and personal navigation.The capability to define the position of elements in the environment with respect to the reference axis,and to stir towards the pre-decided goal,is global navigation.Local navigation deals with the identification of the dynamic conditions of the environment and the establishment of positional relationships among various elements.To handle the various elements of the environment relative to each other,by considering their position,is personal navigation.The basic steps involved in the functioning of the robot[1]are presented in Fig.1.
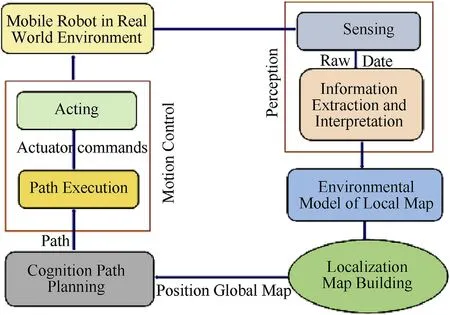
Fig.1.Flow diagram for mobile robot navigation.
In this paper,the navigation strategy has been classified based on the prior information of the environment required for path planning.It is broadly classified as global navigation and local navigation.In global navigation,the mobile robot must require the prior information of the environment,obstacle position and goal position whereas in local navigation the mobile robot does not require the prior information of the environment. Global navigation strategy deals with a completely known environment.Local navigation strategy deals with the unknown and partially known environment.The path planning algorithm for a known environment is based on a classical approach such as CD,RA,and APF.These algorithms are traditional and have limited intelligence.Local navigational approaches are known as reactive approaches as they are more intelligent and able to control and execute a plan autonomously.
Many researchers have presented a survey paper on mobile robot navigation[2-3]but these surveys are insufficient to provide an in-depth analysis of individual navigational techniques.This proposed survey paper on mobile robot navigation aims to find out the research gaps and scope of innovation in a particular area.It gives an in-depth analysis of an individual algorithm for a static environment, dynamic environment in presence of a moving obstacle and goal, simulation analysis, experimental analysis,multiple mobile robot navigation,hybridization with other intelligent techniques,application to a three-dimensional(3D)environment and application in military or defence equipment.The survey also highlights the differences between the classical and reactive approaches based on their effectiveness and application for the specific environment,such as the aerial,land,underwater,industrial and hazardous environment.In Ref.[2],the focus has been given mainly on the reactive approaches based on local sensor information,sliding mode control and decentralized MPC based approaches whereas in Ref.[3]it is limited to 3D path planning only.
Here,the navigation strategies have been classified as conventional and reactive approaches in Section 2.Section 3 provides the discussion on the literature survey followed by conclusion in Section 4.
2. Navigational techniques used for mobile robot navigation
For several decades,various researchers and scientists have provided numerous methodologies on navigational approaches.Various methods employed for navigation of a mobile robot are broadly classified into two categories i.e.classical and reactive approaches(Fig.2).
2.1. Classical approaches
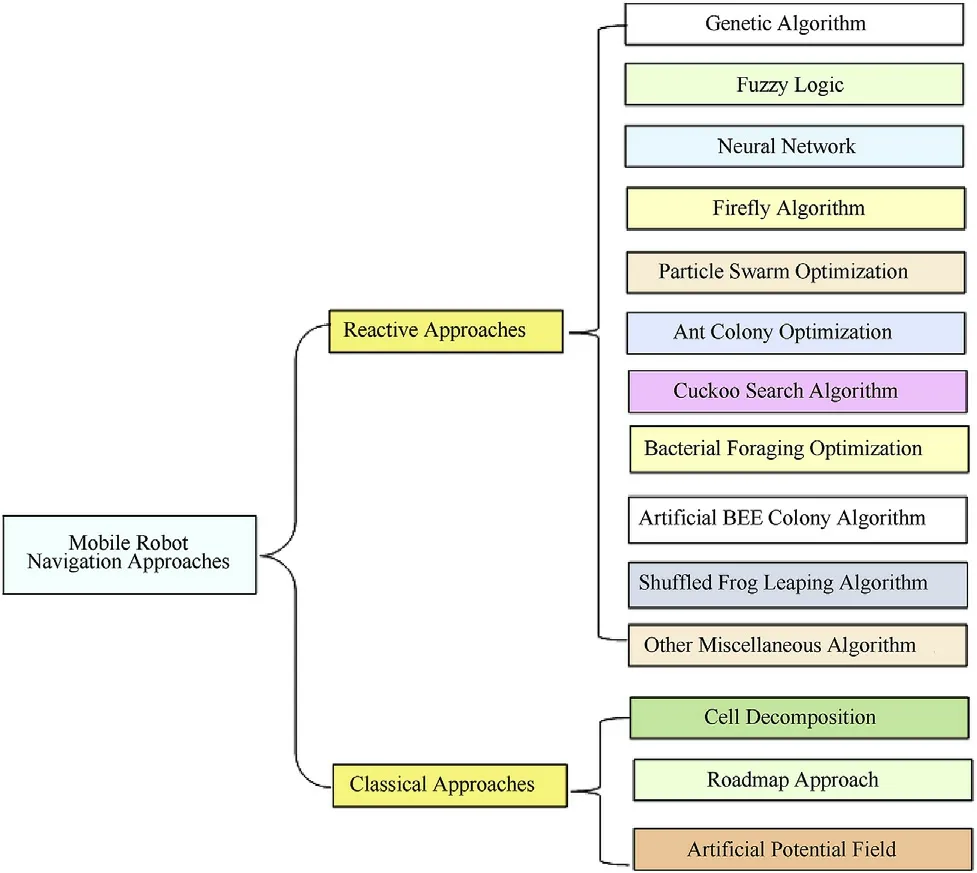
Fig.2.Classification of mobile robot navigational approaches.
Initially,classical approaches were very popular for solving robot navigational problems because in those days artificially intelligent techniques had not been developed.By using classical approaches for performing a task,it is observed that either a result would be obtained,or it would be confirmed that a result does not exist.The major drawback of this approach is high computational cost and failure to respond to the uncertainty present in the environment;therefore,it is less preferred for real-time implementation.CD,RA,and APF are some of the classical approaches which are reviewed here.
2.1.1. Cell decomposition(CD)approach
This approach divides the region into non-overlapping grids(cells)and uses connectivity graphs for traversing from one cell to another to achieve the goal.During traversing,pure cells(cells without obstacles)are considered to achieve path planning from the initial position to the target position.Corrupted cells(cells containing obstacles)present in the path are further divided into two new cells to get a pure cell and this pure cell gets added to the sequence while determining the optimal path from the initial position to the target position.In the CD approach,the initial position and target position are represented by the start and end cells.The sequence of pure cells that joins these positions shows the required path[4-5].The CD approach is classified as adaptive,approximate and exact.
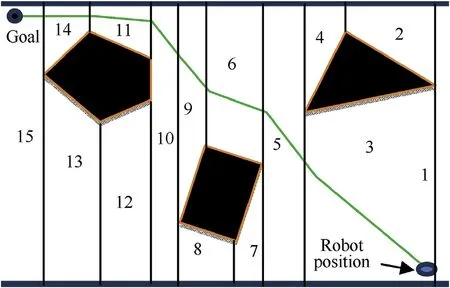
Fig.3.Exact cell decomposition.
In the exact cell decomposition[6-7]shown in Fig.3,cells do not have a specific shape and size,but can be determined by the map of environment,shape,and location of the obstacle within it.This method uses the regular grid in various ways.Initially,the free space available in the environment is decomposed into small elements(trapezoidal and triangular)followed by a number to each element.Each element in the environment acts as a node for a connectivity graph.The adjacent nodes are then allowed to join in the configuration space and a path in this chart compares to a diversion in free space,which is outlined by the succession of striped cells.A path in this diagram links to a network in free space,which is outlined by the succession of striped cells.This channel is then converted into a free path by interfacing the underlying arrangement to the objective design through the midpoints of the crossing points of the adjoining cells in the channel.
In approximate cell decomposition[8-9],planning space has been used to define a regular grid which has a specific shape and size,hence it is easy to implement.In space,the boundaries of the object should not be matched to previously decided cell boundaries,hence it is termed as approximate.In this navigation method,if the object occupies the grid space then it is treated as an obstacle or else it is considered as blank space.In the process of pathfinding in the search area,the center of each cell is assumed as a node.Fig.4 shows the 4 and 8 connected nodes system and the robot must travel diagonally between them.Adaptive cell decomposition understands the information present in free space and follows the basic concept of avoidance of the free space in regular cell decomposition.Samet[10]and Noborio[11]have proposed a quadtree-adaptive decomposition.It divides the environment into large sized cells but when the grid cell is partially occupied then it divides the cell into four equal subparts until it becomes empty.Fig.5 shows the resulting map of the workspace in the presence of grid cells of different sizes touching the boundaries of the obstacles.This system suffers from a drawback that it cannot update the program when getting new data(new position of an obstacle)and hence it fails in dynamic environments.The path planning problem in high dimensional static configuration spaces has been demonstrated by Lingelbach[12].He solved the problem of path planning for chain-like robotic platforms and a maze-like environment.The application of a harmonic function to cell decomposition in a C shape obstacle environment is developed by Rosell et al.[13]whereas Sleumer et al.[14]have presented the path planning strategy for mobile robots using CAD-based information.Cai et al.[15]have presented a sensor based approximate cell decomposition strategy for classifying the multiple fixed targets in a complex environment.The approach developed outperforms in a static environment with the shortest path and gives complete coverage of the environment.The same sensor-based cell decomposition model is proposed by Dugarjav et al.[16]to deal with an unknown rectilinear workspace for the task of a mobile robot.They used the CD approach together with a laser scanning mechanism to avoid objects in unknown environments.Glavaski et al.[17]have presented a hybrid approach to fill the gap between the theoretical achievements and practical considerations in path planning problems.They developed an APF-based exact cell decomposition path planner to reduce the computational cost.To perform in an uncertain environment,the FL along with CD is presented by Tunggal et al.[18]for real-time operation.To handle multiple activities at a time in the 3D environment,a greedy depth-first search algorithm and GA-based cell decomposition approach for path planning of a manipulator is presented by Mark et al.[19].Quantitative studies on the trajectories by varying the involved cell decomposition,the graph weights,and the procedure to calculate the waypoint were presented by Gonzalez et al.[20].Application to an aerial navigation problem using cell decomposition approach for exploring the 3D environment was presented by Wahyunggoro et al.[21].In this approach fuzzy logic is hybridized with the cell decomposition approach for guiding and controlling the aerial vehicle.
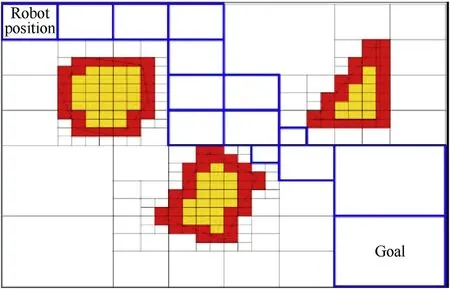
Fig.5.Adaptive cell decomposition.
2.1.2. Roadmap approach(RA)
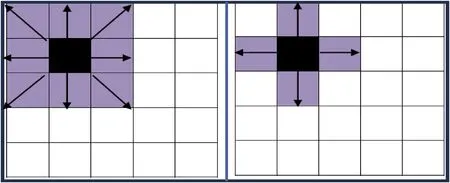
Fig.4.Approximate cell decomposition(8-connected and 4-connected grids).
The RA is also known as the highway approach.It is the way to get from one place to another and the connection among the free spaces is represented by a set of one-dimensional curves[22].When the roadmap is built,then it is utilized as an arrangement of homogeneous ways where the planner will seek to discover the ideal arrangement.Here,nodes play an important role in getting the desired path for the robot.The RA is used to find the shortest path from the robot's initial position to its target position;Voronoi and visibility graphs are used to develop the roadmap.The visibility graph method connects the initial and the goal position with nodes from the map.Fig.6 represents the visibility graph in which the dark area shows obstacles and the dashed line shows the respective path from the initial position to the final position[23].This method is also used for an environment with polygonal obstacles in which the vertices of the polygon are represented by the nodes and edges as a connector between the nodes[24].The Voronoi diagram[25-27]is another roadmap algorithm used for the path planning of the robot.This method divides the region into sub-regions where all edges of the figure are constructed using equidistant points from the adjacent two points on the obstacle's boundaries.Fig.7 represents the working of the Voronoi diagram.The application of the Voronoi diagram in the field of mobile robot navigation around obstacles is presented in Refs.[28-30].To improve the performance and to eliminate drawbacks such as sharp turns and long loops in the Voronoi diagram,some improvement is provided for effective path planning[31].The hybrid approach is developed by combining the visibility graph,Voronoi diagram and potential field method[32]to get path optimality.It has been observed that the approach fails to get the optimal path and the execution process is complicated.To develop successful path planning using Voronoi diagrams,various strategies were implemented such as skeleton maps by Yang et al.[33].A combined approach of using a visibility graph and a Voronoi diagram is presented by Wein et al.[34]to get the optimal route.Kavraki et al.[35]presented the application of probability for RA to understand and generate the solution to path planning.However,the approach is inefficient in getting the optimum path length.To improve the process of finding the shortest path,Sanchez et al.[36]made a minor variation in the probabilistic roadmap approach(PRM).In their approach,the lazy-collisionchecking strategy has been presented with PRM to solve path planning problem of real environment.Navigation in a 3D environment for an unmanned aerial vehicle has been successfully tested by Yan et al.[37].In this approach the road map approach is presented with a probabilistic formulation to control the flight route.
2.1.3. Artificial potential field(APF)approach
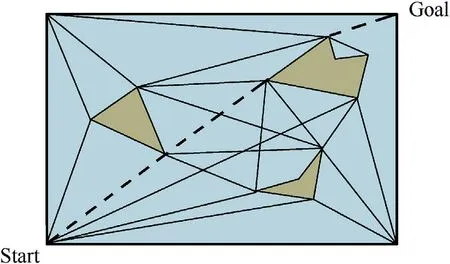
Fig.6.Visibility graph.
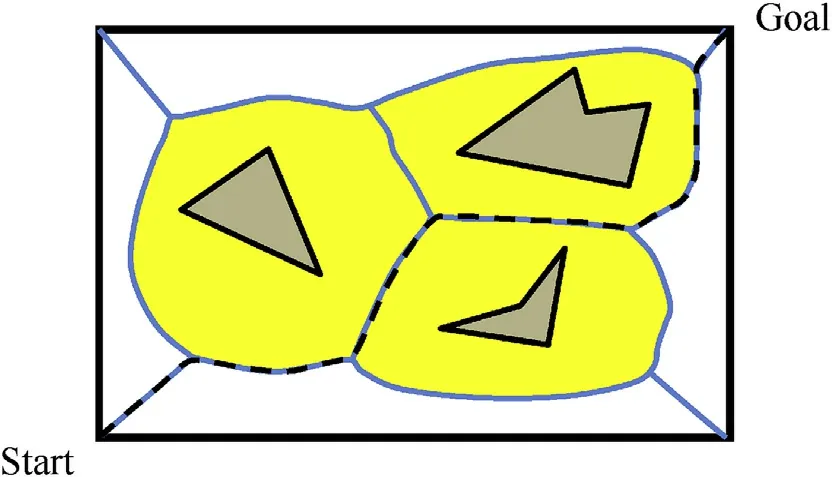
Fig.7.Voronoi diagram.
Khatib[38]in 1986 presented the APF approach for mobile robot navigation. According to him, the goal and obstacles act like charged surfaces and the total potential creates the imaginary force on the robot.This imaginary force attracts the robot towards the goal and keeps it away from an obstacle as shown in Fig.8.Here,the robot follows the negative gradient to avoid the obstacle and reach the target point.Application of this method for mobile robot navigation is presented by Garibotto et al. [39]. A new obstacle avoidance strategy in an unknown environment is discussed by Kim et al.[40]by using APF.They used a harmonic function to avoid a local minimum problem.Borenstein et al.[41]have also presented a solution to the problem of the local minima conditions.In this research,they have considered the dynamic properties of robot navigation.The analysis of APF in the dynamic environment for obstacle avoidance is performed in Refs.[42-43].Some improvisation in the APF method is made by using laws of electrostatics[44].Implementation of electrostatics helps to produce the potential function and to determine the collision-free path in real time.Moving obstacle avoidance in a real-time environment is not an easy task and hence Huang[45]developed a velocity controlling mechanism to understand the location and velocity of the obstacle while achieving the goal.To avoid local minima and to achieve global optima,the superior potential function and superior repulsive potential function were introduced by Shi et al.[46].Sfeir et al.[47]solve the observed problem in mobile robot navigation by APF approaches such as oscillation and conflicts.They have presented an improved version of the APF to minimize the oscillation and conflicts when the goal is close to the obstacle.To test the applicability of the APF,Pradhan et al.[48]used the ROBOPATH simulation tool. Multiple mobile robots are considered for various environmental conditions and they observed better results in coordination strategy without collisions.To increase the performance of the APF path planner it is used with many techniques such as BFO[49],which is explained in Fig.9,GA[50],PSO[51],and FL[52].Navigation in three-dimensional aerial and underwater conditions is a challenging task but is made successful by using an APF approach by Cetin et al.[53]and Li et al.[54]respectively.
2.2. Reactive approaches
Recently,reactive approaches such as genetic algorithm,fuzzy logic,neural network,firefly algorithm,particle swarm optimization, ant colony optimization, bacterial foraging optimization,artificial bee colony,cuckoo search,shuffled frog leaping algorithm and other miscellaneous algorithms consisting invasive weed optimization,harmony search algorithm,bat algorithm,differential evolution algorithm and many more have been accepted as the most popular tool for mobile robot navigation over conventional approaches.They have a great ability to handle the uncertainty present in the environment.The various reactive approaches are discussed below.
2.2.1. Genetic algorithm(GA)
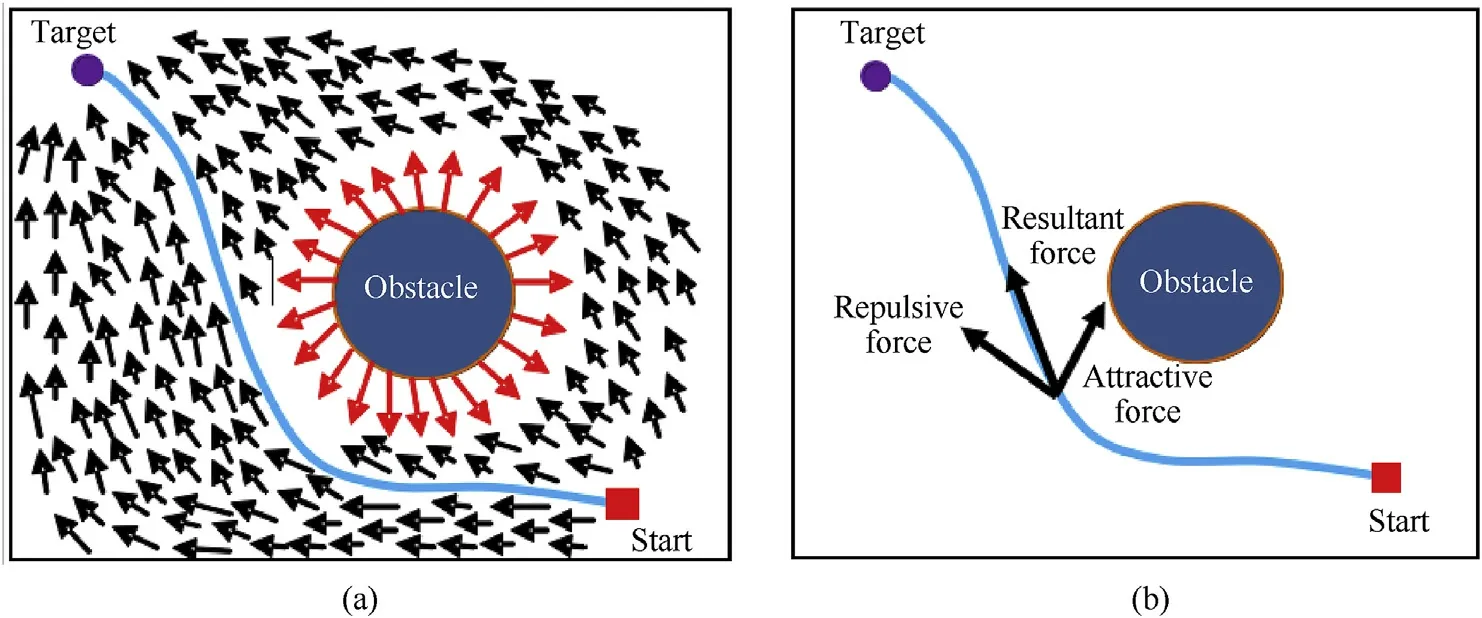
Fig.8.Mobile robot navigation by APF approach.
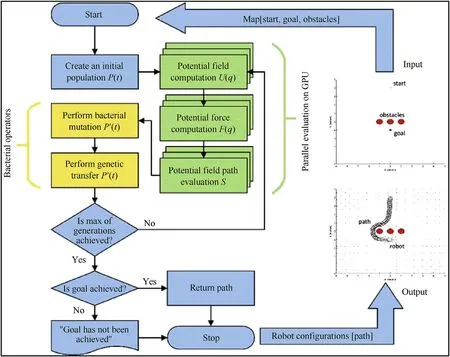
Fig.9.Bacterial-Potential field controller for navigation of mobile robots[52].
This is a popular search-based optimization tool which follows the principle of genetics and natural selection discovered first by Bremermann[55]in 1958.Its application to the field of computer science was presented first by Holland[56]in 1975.Nowadays,it has wide application in all areas of science and technology including robot navigation.Specifically,it deals with the optimization of difficult problems wherein we must maximize or minimize the objective function value under given constraints.In this approach,the population(different individuals characterized by genes)must be allotted for the given problem and every member of the population is assigned with a fitness value depending upon the objective function.These individuals are selected as per their fitness value and allowed to pass their genes to a new generation by crossover.The mutation maintains the diversity in population and prevents premature convergence.Finally,the algorithm is terminated if the population has converged.Although the GA is randomized in nature to some extent,its performance is better as they can exploit historical information as well when compared to a random local search.The application of GA for the mobile robot navigation problem has been provided by Ref.[57]for a static environment.The analysis is presented by simulation results only in the presence of a polygonal obstacle.Classical approaches for searching and optimization are very slow in real-time and hence Shing et al.[58]presented a real-time path planner.For an unknown environment,GA is a robust search method which requires very little information on the environment about searching efficiently.This method is adopted by Xiao et al.[59]to achieve the goal of navigation such as path length,path smoothness,and obstacle avoidance. The non-linear environmental problem of navigation for a dead end is addressed by Ref.[60]in tricky areas.For this,they have proposed an online training model for getting the fittest chromosome to avoid any stuck situations and to find a way out from such conditions.Most of the researchers have provided navigation in a static environment only by using GA but the navigation in the presence of a moving obstacle in an uncertain environment is proposed by Shi et al.[61].To get better results in robot path planning, many researchers have combined the application of GA together with another intelligent algorithm to get a hybrid approach,such as GA-FL[62],GA-NN[63]and GA-PSO[64].Multi-robot path planning is one of the challenges in robotics.Kala[65]addressed the path planning strategy for multiple mobile robots by using GA.In his work,he developed the time efficient coordination strategy for collision avoidance of multiple robots in a static environment.Similar to multiple robot path planning, the strategy for multiple goals is demonstrated in Ref.[66]for a static environment.Navigation in a dynamic environment for a multi-mobile robot system is solved by Yang et al.[67].They have demonstrated the results in the presence of both static and dynamic obstacles.In many investigations,it is observed that the GA has some limitations such as slow convergence rate,absence of guaranty to get the optimal solution,time-consuming process in deciding the parameters for mutation rate and population size,etc.Hence,the modified GA path planner by implementing a co-evaluation mechanism among the population for robot navigation is presented by Hong et al.[68].By modifying the GA,they have presented the optimized simulation results in terms of obstacle avoidance and path optimality for multiple robot systems in an unknown environment.For path optimization,another modified form of GA is presented by Jianjun et al.[69].In their approach,the length of the chromosome is modified to get the best output.The GA approach responds to the environment(known and unknown)efficiently;hence it is adopted in the 3D path planning problem of underwater robot[70]and aerial robot[71-72],and 2D path planning of a humanoid robot[73].To deal with the problem of a moving target,Patle et al.[74]have provided the matrix binary code based genetic algorithm(MGA)in the complex environment for the single and multi-robot system.In this approach,the robot can easily track the moving obstacle and moving goal,and reaches the destination in a short period of time(Fig.10).The GA approach is a commonly used intelligent technique for defence equipment.A demonstration of missile control,based on a combination of the GA approach and fuzzy logic,has been presented by Creaser et al.[75].The GA plays an important role in generating the guidance law for the missile.A novel methodology based on GA for the military and ocean monitoring domain is provided by Iyer et al.[76].They used GA to protect a high value military asset and to identify the optimal positioning strategy for underwater sensor network positioning and deployment.
2.2.2. Fuzzy logic(FL)
The concept of FL was given first by Zadeh[77]in 1965 and was later on used in all the fields of research and development.It is used in situations where there is a high degree of uncertainty,complexity,and nonlinearity.Pattern recognition,automatic control,decision making,data classification are a few of them.The hypothesis of the FL framework is encouraged by the noteworthy human ability to process perception-based information.It uses the human-supplied rules(If-Then)and converts these rules to their mathematical equivalents.This streamlines the job of the system designer and computer for getting more correct information about the way systems perform in the real world and hence it is used for path planning of a mobile robot.Fig.11 explains a simple FL system with If-Then rules.A fuzzy(Sugeno)based navigation is presented by Zavlangas et al.[78]for the omnidirectional mobile robot.An automatic fuzzy rule generation system for obstacle avoidance is developed by Castellano et al.[79]for effective navigation.The navigation system in an unstructured static and dynamic environment is presented using FL which avoids the problems of navigation such as the continuous making of loops,backtracking[80],dead-end traps(U-shaped,maze,snails)[81-82],steering from narrow passages[83],curved trajectory[84].Nowadays,FL has been used in combination with the sensor based navigation technique[85]to improve the incremental learning of the new environment;reinforced based navigation[86]to minimize the angular uncertainty and radial uncertainty present in the environment;and algorithm based navigation technique such as NN[87],GA[88],APF[89],ACO[90]and many more to achieve an optimal perception of the environment which enables the robot to manage a dead-end situation.
Navigation problems in the dynamic environment were solved by Khatib et al.[91]and Lee et al.[92]by introducing FL as a datadriven approach. Hoy et al. [93] presented the cooperative approach for navigation of multiple mobile robots in an unknown cluttered environment.To improve the capability of the robot in a moving condition,Kang et al.[94]and Al-Mutib et al.[95]presented a stereovision-based mechanism with FL. To track the moving object,Abadi et al.[96]designed the Mamdani based FL controller for a wheeled mobile robot.They used the PSO algorithm with FL as a hybrid approach to select the best parameters.The effective functioning of FL was presented by Castillo et al.[97]to maintain the diversity control in ACO and to avoid premature convergence.Al-Jarrah et al.[98]presented the path planning strategy for multiple mobile robot systems and active motion coordination between them by using a probabilistic fuzzy controller[99]with the NN.In this approach,a leader robot position will be followed by a follower robot.The first order Sugeno fuzzy system was applied to the head robot in order get a high-level controller whereas the companion robot has a low-level controller. The learning strategy is developed by using the NN and efficient fuzzy rules are tuned by ANFIS.The fuzzy-based strategy was applied for navigation of a humanoid robot in the 2D environment by Rath et al.[100].The navigation in a 3D environment is one of the difficult tasks which is addressed using fuzzy logic for path planning of aerial robots,and underwater robots by Abbasi et al.[101]and Xiang et al.[102]respectively.The FL approach has been used in the defence field for controlling and guiding missiles,drones and underwater robots.Rajasekhar et al.[103]used fuzzy logic with PNG(proportional navigation)which generates acceleration commands for the missile using closing velocity and LOS(line-of-sight)rate as input variables.Lin et al.[104]demonstrated the fuzzy group decision support system for the selection of an appropriate UAV(unmanned aerial vehicle)for a military operation.In his work,fuzzy logic plays an important role in a multi-criteria decisionmaking problem by handling the linguistic as well as ordinary quantitative information.
2.2.3. Neural network(NN)
Artificial NN is an intelligent system which consists of many simple and highly interconnected processing elements.These elements transfer the information by their capability of dynamic state response to external inputs.The NN is basically shown by wellorganized layers of interconnected nodes.The nodes consist of an activation function.The input layer of the NN mechanism recognizes the patterns shown below in Fig.12.These patterns then communicate to hidden layers for actual processing via a system of weighted connections.The hidden layers connect with the output layer to give the required answer. NN characteristics such as generalization ability,massive parallelism,distributed representation,learning ability and fault tolerance make it useful in the field of mobile robot navigation.Janglova[105]presented the application of a NN for a wheeled mobile robot navigation in a partially unknown environment.He used two NN-based mechanisms for the development of a collision-free path.The first neural mechanism finds the free space using sensory data and another NN finds a safe trajectory by avoiding the nearest obstacle.To avoid human guidance in the process of navigation,Qiao et al.[106]presented an automation learning strategy.The feature of their work is that,according to the complexity of the environment,the NN adjusts insertion and deletion of new hidden layers during the training without human guidance to accomplish the navigation task.Li et al.[107]have presented the application of NN to Fast Simultaneous Localization and Mapping technique(Fast SLAM)to eliminate the error accumulation produced by an incorrect odometry model and inaccurate linearization of the SLAM nonlinear function.The use of the NN with Fast SLAM enhances the mobile robot to navigate without collision with the obstacle in the unknown environment.To achieve the optimum result during a robot navigation operation,various approaches are used together with the NN as a hybrid mechanism.Yong-Kyun et al.[108]have presented the combined effort of the NN with APF to get cooperative coordination and competitive coordination for behavior-based control.
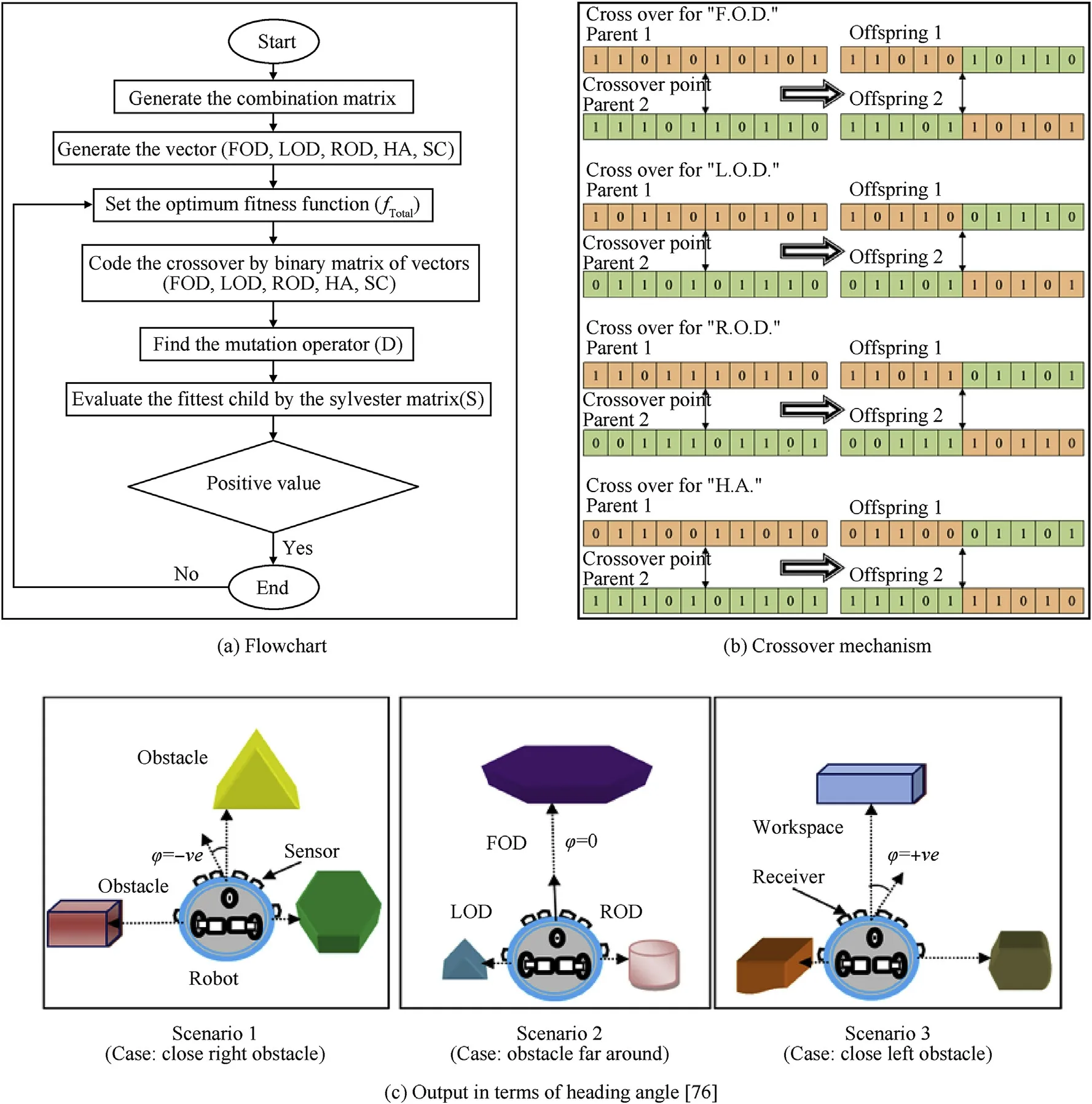
Fig.10.MGA(a)Flowchart(b)Crossover mechanism(c)Output in terms of heading angle[76].
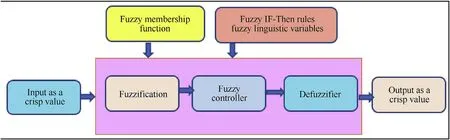
Fig.11.Basic FL controller.
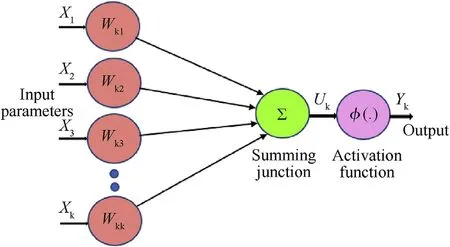
Fig.12.Architecture of NN.
Pothal et al.[109]have presented the hybrid approach of the NN and FL to take the benefits of both the intelligent mechanisms for multiple mobile robot navigations in a disorderly conditions.The proposed work is analyzed in the presence of a static obstacle architecture(Fig.13).Abu Baker[110]has presented a novel hybrid approach for mobile robot navigation by combining FL with the NN.The NN effectively finds the optimum number of activation rules to reduce computation for a real-time application.Pal et al.[111]have presented the application of the NN with sonar to mobile robot navigation.Medina-Santiago[112]have introduced a neural control system for the mobile robot in real time by using ultrasonic sensors.To improve the performance of the NN,Syed et al.[113]have modified the basic NN to form GAPCNN to get fast convergence of parameters for a mobile robot moving in a static and dynamic environment.The approach is modified by applying directional autowave control and accelerated firing of neurons based on the dynamic thresholding strategy.A NN-based self-learning strategy for the mobile robot is presented by Markoski et al.[114].Pattern recognition is used as a tool for mobile robot navigation in an unknown environment with a NN and is demonstrated by Quinonez et al.[115].The NN is a widely applicable path planner approach due to its ability to learn and model non-linear and complex relationship. It requires minimum statistical training, explores complicated relationship between dependent and independent variables,is capable to detect and solve all probable interaction between predictors variable and gives multiple training algorithms,hence it is used in the path planning problem of humanoid robot[116]and industrial robot[117]in a 2D environment,underwater robot[118]and aerial robot[119]in 3D environment.In the defence and aerospace sector,there has been a notable increase in the number of sensors and data sources which are used for the guidance, navigation, targeting, commanding and controlling the equipment.Therefore,Bishop[120]provided the use of a NN for modeling the nonlinear mapping from the inputs from multiple sensors to the optimized output.He presented the NN based pattern classification for target identification and later it is widely used in military equipments.One more strategy based on NN for intelligent target system from the target echo signal of the highresolution range is presented by Avci et al.[121].In this work,they have modeled the two-layer NN system i.e.wavelet and multilayer perception. The wavelet layer is used for feature extraction in the time-frequency domain and multi-layer perception for classification.
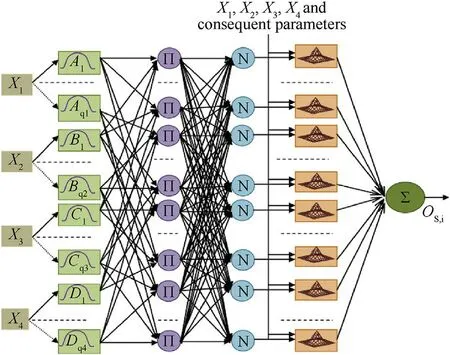
Fig.13.The architecture of the Neuro-Fuzzy approach for mobile robot navigation[109].
2.2.4. Firefly algorithm(FA)
Yang[122]introduced the FA in 2008.It is inspired by the fireflies flashing behavior,although it is also referred to as the metaheuristics algorithm.Its principle comprises random states and general identification as trial and error of fireflies which is existing in nature stochastically.The firefly is a winged beetle of the family Lampyridae and commonly is called a lightning bug due to its ability to produce light.It produces light by a process of oxidation of Luciferin in the presence of the enzymes Luciferase,which occurs very quickly.This process of producing light is known as bioluminescence and fireflies use this light to glow without wasting heat energy.Fireflies use this light for selection of a mate,communicate a message and sometimes also for scaring off animals who try to eat them.The pseudo code and flowchart for navigation of a robot using the FA are presented in Fig.14.Recently the FA has been used as an optimization tool and its application is spreading in almost all areas of engineering such as mobile robot navigation.Hidalgo-Paniagua et al.[123]have presented a FA based mobile robot navigational approach in the presence of a static obstacle.They have achieved the three primary objectives of navigation such as path length,path smoothness,and path safety.Brand et al.[124]presented the FA for the shortest collision-free path for single mobile robot navigation in a simulational environment only.Sutantyon et al.[125]demonstrated the FA for the underwater mobile robot navigation.They developed the scheduling strategy for swarm robots to avoid interference and jamming in 3D marine conditioning.In the same environment[126],one more real-world underwater navigation problem in the partially known environment is addressed by them using the levy light-firefly based approach.The FA based cooperative strategy for detection of dead robots in a multi-mobile robot system is presented by Christensen et al.[127].The application of FA to explore a 3D world for aerial navigation is developed and experimented by Wang et al.[128].In their experiment,the improved version of FA is applied for path planning of an UCAV in the complex crowded environment and to avoid hazard areas and minimizing the fuel cost.The concentric sphere based modified FA algorithm has[129]been presented to avoid random moving of the fireflies in less computational efforts.The experimental and simulational results show a great commitment in achieving the goals of navigation in a complex environment.The analysis of a FA in the presence of a variety of obstacles(concave,zigzag and convex)for a single as well as a multi-robot system is evaluated in Ref.[130].A variety of experiments for robot path planning are performed by many researchers such as a FA-vision-based system[131],FA-Q learning approach[132],FAABC hybrid approach[133]and many more.The specific application to a legged robot and underwater robot using FA is demonstrated by Tighzert et al.[134]and Liu et al.[135]respectively.Patle et al.[136]addressed the problem of navigation specifically in dynamic conditions.They used the FA to demonstrate the path planning approach in the presence of a moving goal and moving obstacle.
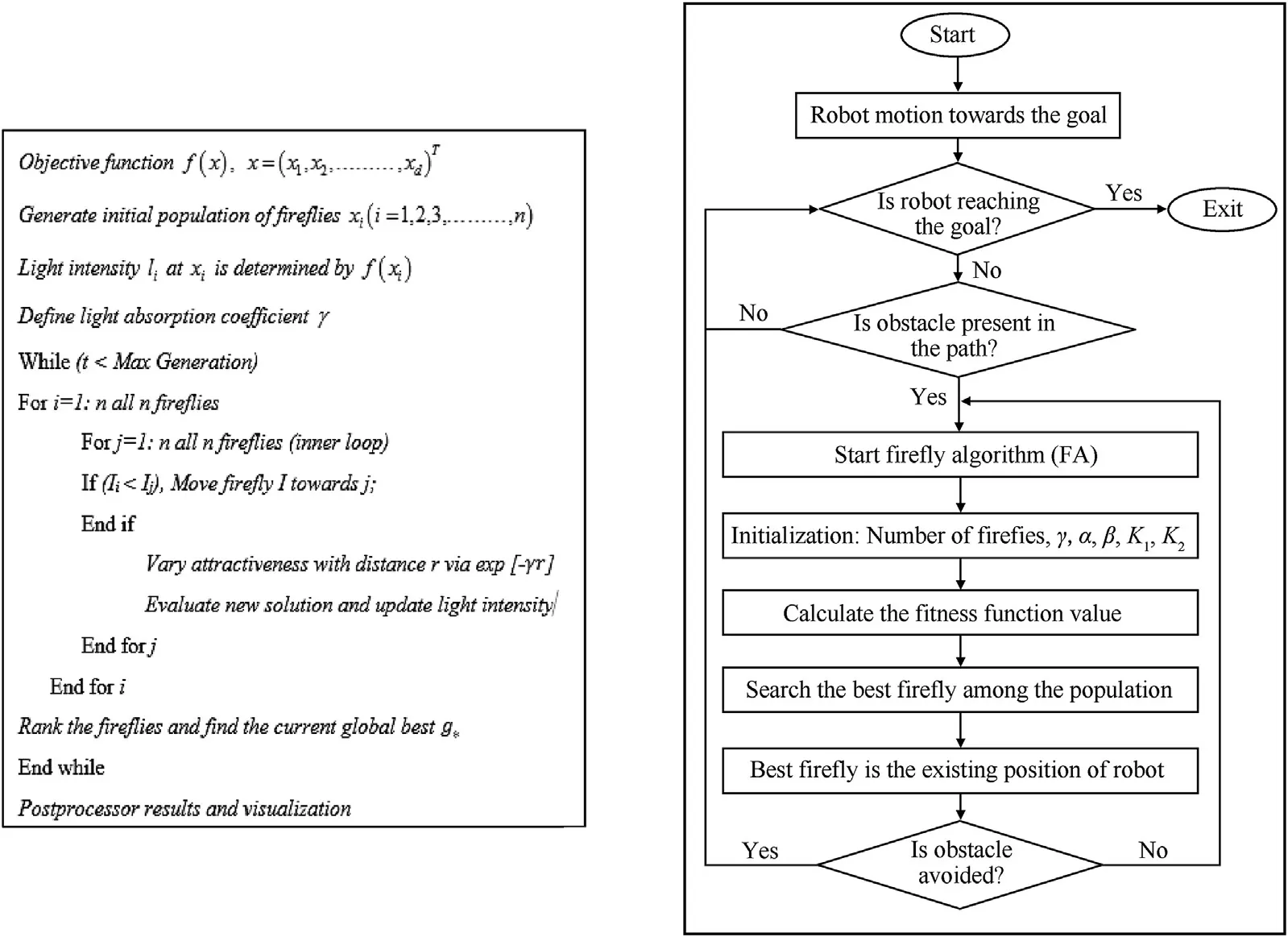
Fig.14.FA pseudo code and flowchart for navigation robot[136].
2.2.5. Particle swarm optimization(PSO)
This is a nature-based metaheuristic algorithm which adopts the social behavior of creatures such as fish schools and bird flocks.It is developed by Eberhart and Kennedy[137]in 1995 and it is a rapidly growing optimization tool for solving the various problems of engineering and science.The PSO mimics the behavior of the social animal but does not require any leader within the group to reach the target.When the flock of birds goes to find food,they do not require any leaders;they go with one of the members who is at the nearest position to the food(Fig.15).In this way,the flock of birds reaches their required solution by proper communication with the members of the population.The PSO algorithm consists of a group of particles where each particle represents a potential solution.Nowadays,PSO is widely used in the field of mobile robot navigation.Tang X.et al.[138]addressed the mapping and localization issues of mobile robot navigation in the unknown environment by using a multi-agent particle filter.The use of PSO helps to minimize the calculation and holds more stable convergence characteristics.To get an accurate trajectory and to avoid trapping in local optima Xuan et al.[139]have used a PSO algorithm with MADS algorithm(Mesh Adaptive Direct Search).Using the PSO MADS algorithm together gives an efficient result over the GA and EKF(Extended Kalman Filter). Atyabi et al. [140] have developed the Area Extended PSO(AEPSO)as an extension of the basic PSO to address the dynamic and time-dependent constraint problems of mobile robot navigation.The AEPSO approach is successfully implemented in search and rescue of survivors and bomb disarming.To handle the navigation of a multi-mobile robot system,Tang et al.[141]have addressed cooperative motion path planning in the complicated environment by using the PSO.The PSO in combination with the multibody system dynamics consisting of the properties of robotlike acceleration,mass,force,inertia which is then considered for investigation of fault tolerance of the proposed approach.Some modification has been made by Couceiro et al.[142]for navigation of multiple mobile robots in the real world.They modified the form of PSO and Darwinian PSO(DPSO)system for obstacle avoidance and mutual communication issues.They found that in a system of 12 physical robots the efficiency achieved was up to 90%in a sense of maximum communication distance and global optimum.Chen et al.[143]have tried to develop the human expert control strategy with the learning-based ability for the uncertain environment by using a multi-category classifier.For this,the PSO is used to get higher accuracy within the short time.In comparison with the conventional grid search,it gives higher accuracy.
Li et al.[144]have worked on a self-adaptive learning particle swarm optimization(SLPSO)approach as shown in Fig.16 for solving the path planning problem of the robot in a complex environment under various constraints.Initially,they transformed the path planning problem into a minimization multi-objective optimization problem and achieved the objective of navigation such as path length,collision risk degree,and smoothness,and then a self-adaptive learning mechanism was implemented to improve the searchability of the PSO in the multi-constrained environment.To develop efficient path planning,a hybrid approach has been given by Das et al.[145].They presented the application of PSO and improved gravitational search algorithm(IGSA)as a hybrid methodology to evaluate the optimal path planning for multiple mobile robots in a cluttered environment.The use of PSO to underwater navigation problem in a complex 3D environment is studied by He et al.[146].In that work,the combined PSO-UFastSLAM approach has been used to improve the accuracy of estimation and to limit the particles to get better results.Similar to underwater robots,the PSO approach has been successfully implemented for navigation of an aerial robot in a 3D unknown environment[147],humanoid robot[148]and an industrial robot[149].Algabri M et al.[150]have presented the comparison of various approaches such as GA,PSO,NN and FL to identify the best navigational control and concluded that the FL paired with PSO gives the optimal results in distance traveled.The applications of PSO are not limited to mobile robot navigation only in the defence sector.Banks et al.[151]have investigated the utilization of PSO for non-deterministic navigation of UAV and allowing them to work cooperatively toward the goal of protecting a wide area against airborne attack.
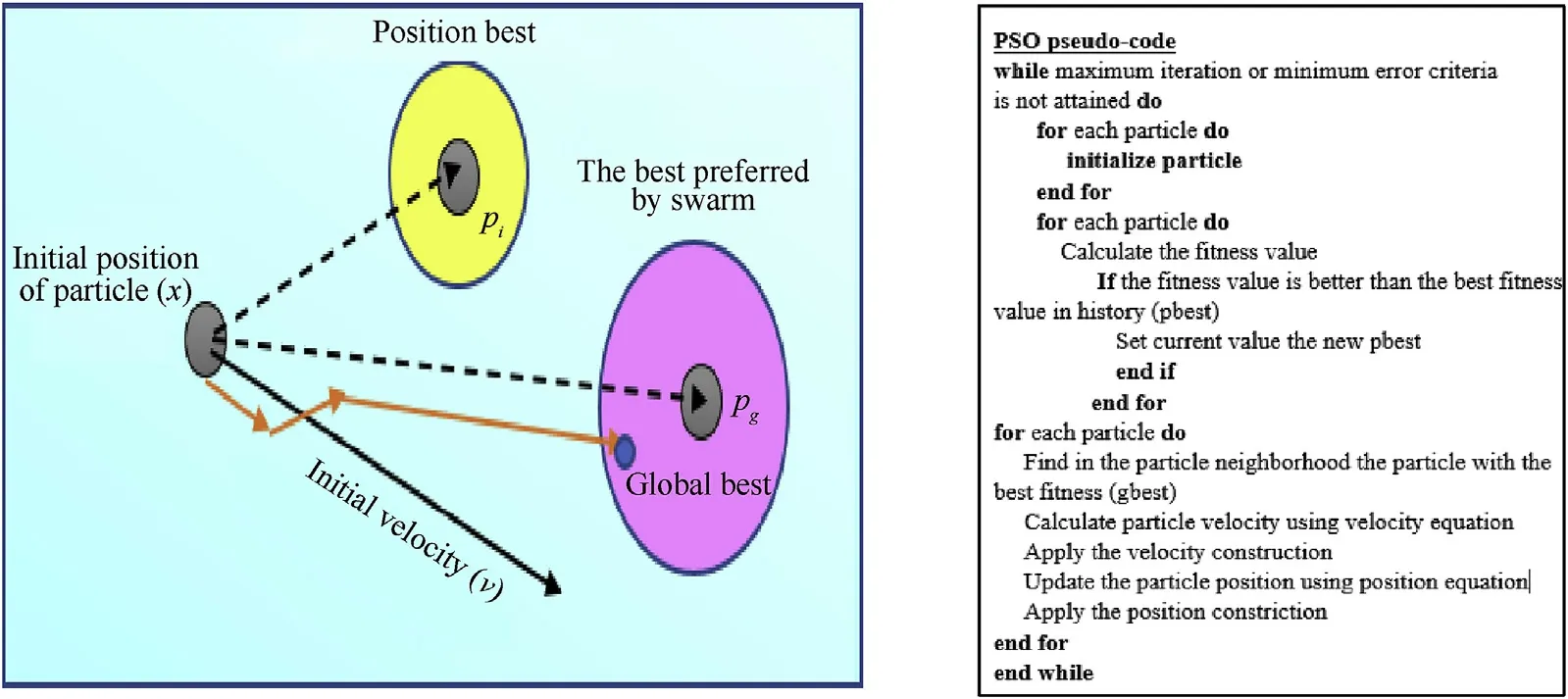
Fig.15.Basics of PSO and pseudocode.
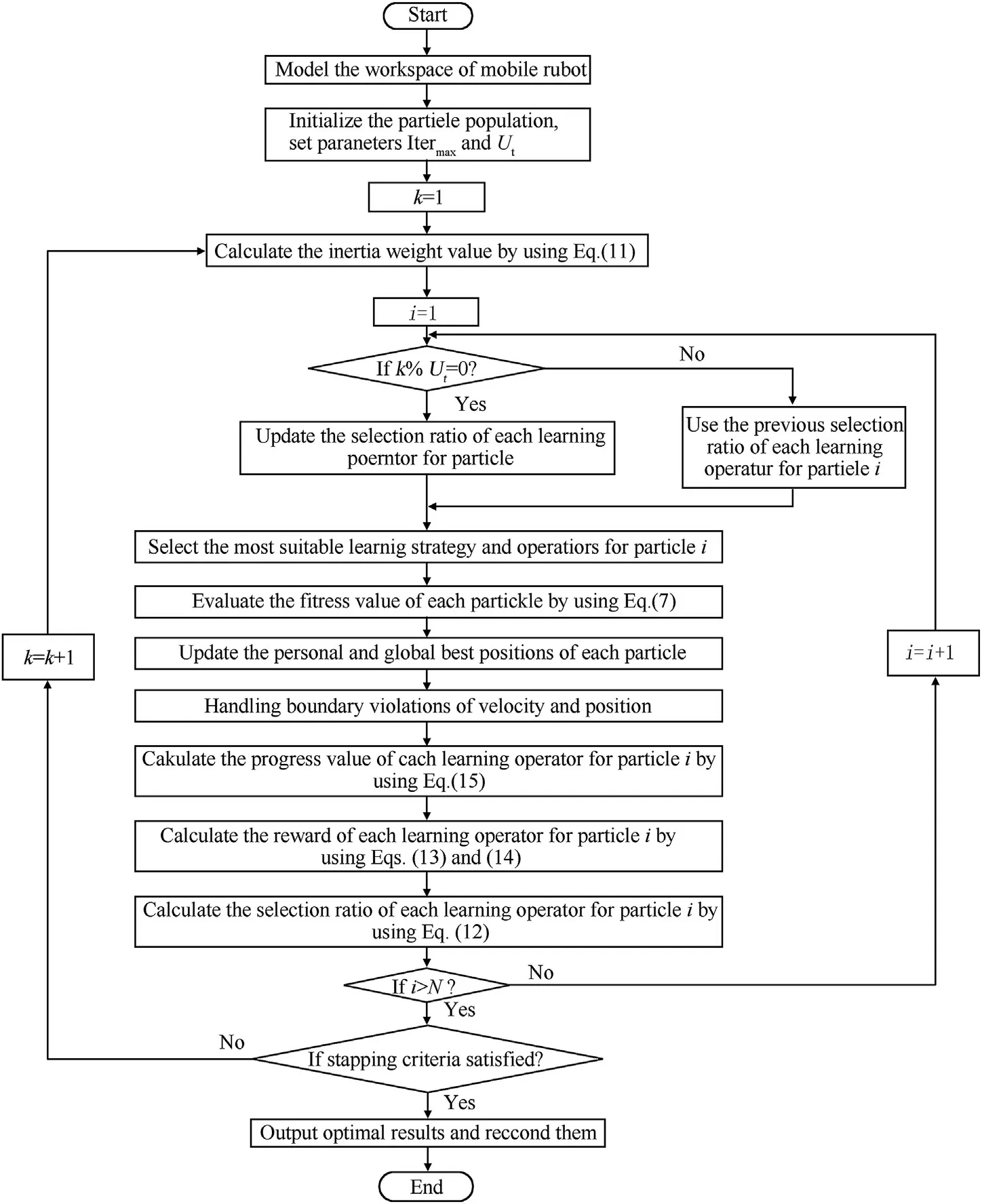
Fig.16.SLPSO flowchart for mobile robot navigation[144].
2.2.6. Ant colony optimization(ACO)
This is a swarm intelligence algorithm developed by Marco Dorigo in 1992 in his Ph.D.thesis[152].It is a population-based approach used to solve the combinatorial optimization problem.The ACO algorithm originated from the behavior of ants and its ability to find the shortest path from their nest to a food source(Fig.17).The ACO algorithm is already applied to various fields of science and engineering such as job-shop scheduling, vehicle routing,quadratic assignment problem,travelling salesman problems,graph coloring and many more.Nowadays,the ACO is used to handle the mobile robot navigation problem for obstacle avoidance and effective path planning.Guan-Zheng et al.[153]presented the application of ACO for real-time path planning of mobile robots.The adoption of the ACO increases the convergence speed,solution variation, computational efficiency and dynamic convergence behavior when compared with other algorithms such as GA.Navigation for multiple mobile robots is presented by Liu et al.[154]by using ACO. They presented a collision avoidance strategy for various robot systems in a static environment.They used a special function to improve the selective strategy.When an ant finds a dead-corner then a penalty function is used for the trail intensity to avoid the path deadlock of the robot.An ACO-fuzzy based hybrid approach for mobile robot navigation is presented by Castillo et al.[155]for navigation in a static environment.An RA-ACO based approach for navigation of a humanoid robot is presented for a cluttered environment by Kumar et al.[156].They tested the proposed approach for navigation of multiple humanoid robots in a real-time environment using Petri-Net and obtained a good commitment in simulation results and real-time results.To increase the performance of the present ACO approach in the static environment some modification is suggested by Liu et al.[157].According to them,convergence speed is the main contribution to performance.They combined pheromone diffusion and geometric local optimization for searching of the optimal path which results in the current path pheromone diffusing in the direction of the potential field force during the searching-ants tend to search for a higher fitness subspace,and the search space of the pattern becomes smaller.A further modification for the dynamic environment is presented by Rajput et al.[158].They also presented a novel pheromone updating technique to avoid unnecessary looping and to achieve faster convergence.Purian et al.[159]have presented the application of the ACO algorithm for mobile robot navigation in an unknown dynamic environment.They have used the ACO for selection and optimization of the fuzzy rules.The pseudocode and flow chart(Fig.18)for analysis of a mobile robot over the same environmental setup in simulation and experiment is presented by Brand et al.[160].Path planning in 3D for underwater vehicles is proposed by Liu et al.[161]using an ACO-based search algorithm whose purpose to is find a collision-free path from the start position to the destination.To resolve the unmanned aerial vehicle route problem for a battlefield,the ACO algorithm has been presented by Chen et al.[162]with reinforcement learning to improve the stagnation behavior and deficiency in searching speed of the original ant colony algorithm.Application of ant colony algorithm is also seen in the military equipment's.Gao et al.[163]presented the application of ACO for route planning of a missile with improved performance especially optimal route length and speed-up of the convergence rate of the optimal route search process.
2.2.7. Bacterial foraging optimization(BFO)algorithm
Passino[164]in 2002 presented the new nature-inspired optimization algorithm which is originated from the behavior of an E.coli and M.Xanthus bacteria.These bacteria search for nutrients by making the best use of energy achieved per unit time.The BFO algorithm is featured by chemotaxis that perceives chemical gradients by which bacteria communicate specific signals with each other.It has four basic principles such as chemotaxis,swarming,reproduction and elimination,and dispersal.The behavior of the bacteria[165]for searching the nutrient region is presented as below and explained in Fig.19.
·Bacteria always travel in search of more nutrient regions on the map.Bacteria with sufficient food have a longer life and split into two equal parts whereas bacteria in the lesser nutrient region will disperse and die.
·Bacteria present in the more nutrient region are attracted to others by chemical phenomenon and those who are in the lesser nutrient region give a warning signal to other bacteria using a specific signal.
·Bacteria get a highly nutrient region on the map.
·Bacteria are dispersed again in the map for a new region of nutrients.
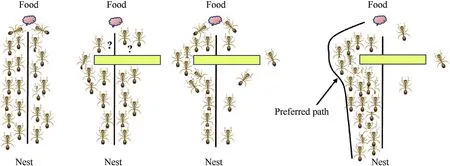
Fig.17.The behavior of ants while searching the food.
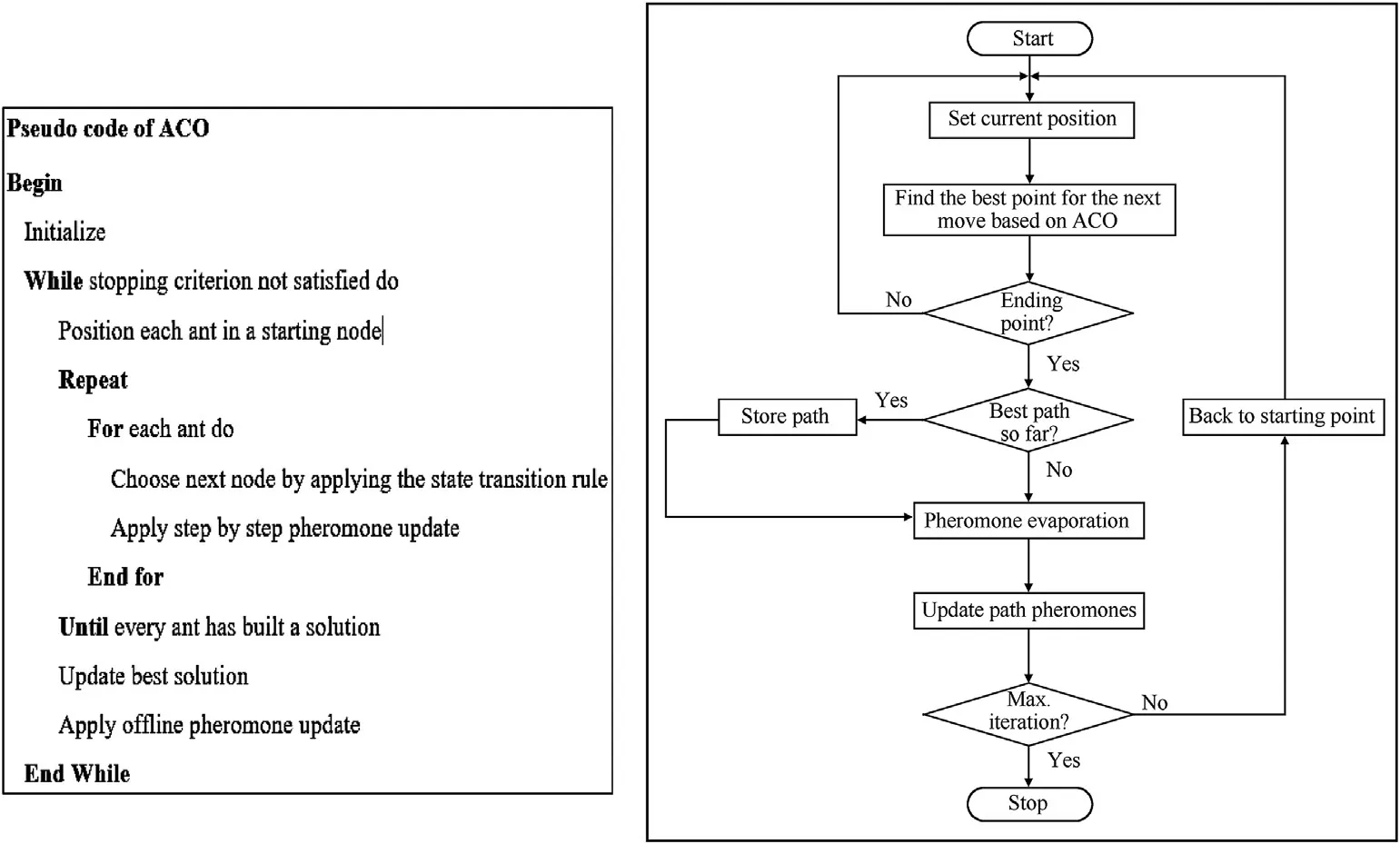
Fig.18.ACO pseudo code and flowchart for path planning of robot by Brand et al.[160].
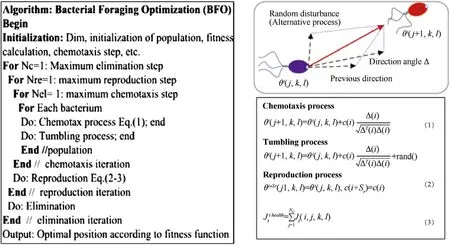
Fig.19.BFO pseudo code by Tan et al.[165].
The application of the BFO algorithm for mobile robot navigation in a static environment is provided firstly by Coelho et al.[166]with variable velocity based on uniform,Gauss,and Cauchy distribution.The same strategy in the presence of multiple obstacles is presented in Refs.[167—169]for navigation in a static environment.Real-time navigation in corridor,lobby and building floor environments for a single mobile robot system is presented by Gasparri et al.[170].To improve the performance of a wheeled robot in path planning,an enhanced BFO algorithm is developed by Abbas et al.[171].The developed approach models the environment using an APF technique over two opposing forces i.e.attractive force for the goal and repulsive force for the obstacles;the approach inspects negative feedback from the algorithm to select suitable direction vectors that guide the search process to the promising area with a better local search.The navigation in the presence of multiple robots is itself a challenging task;a BFO algorithm to deal with such a situation is presented by Jati et al.[172].In their work,they hybridized the harmony search algorithm with BFO.Apart from the application to the wheeled robot,the BFO algorithm has been tested successfully for an industrial manipulator-see Coelho et al.[173]who observed that the improved BFO gives better results compared to the classical BFO.The navigation problem of an UAV using BFO have presented by Oyekan et al.[174].In this approach,the BFO has been presented with a proportional integral derivative(PID)controller to get optimal search parameters in 3D space and to avoid complicated modeling while tuning the controller for UAV.
2.2.8. Artificial bee colony(ABC)algorithm
The ABC algorithm is a swarm-based intelligent approach inspired by the activities of honey bees(Fig.20)in search of food and is proposed by Kharaboga[175].The ABC algorithm is a population-based strategy consisting of a population of inherent solutions(food source for bees).It is relatively simple in use,fast in processing and is a population-based stochastic search approach in the field of swarm algorithms.The food search cycle of ABC consists of the following three rules.
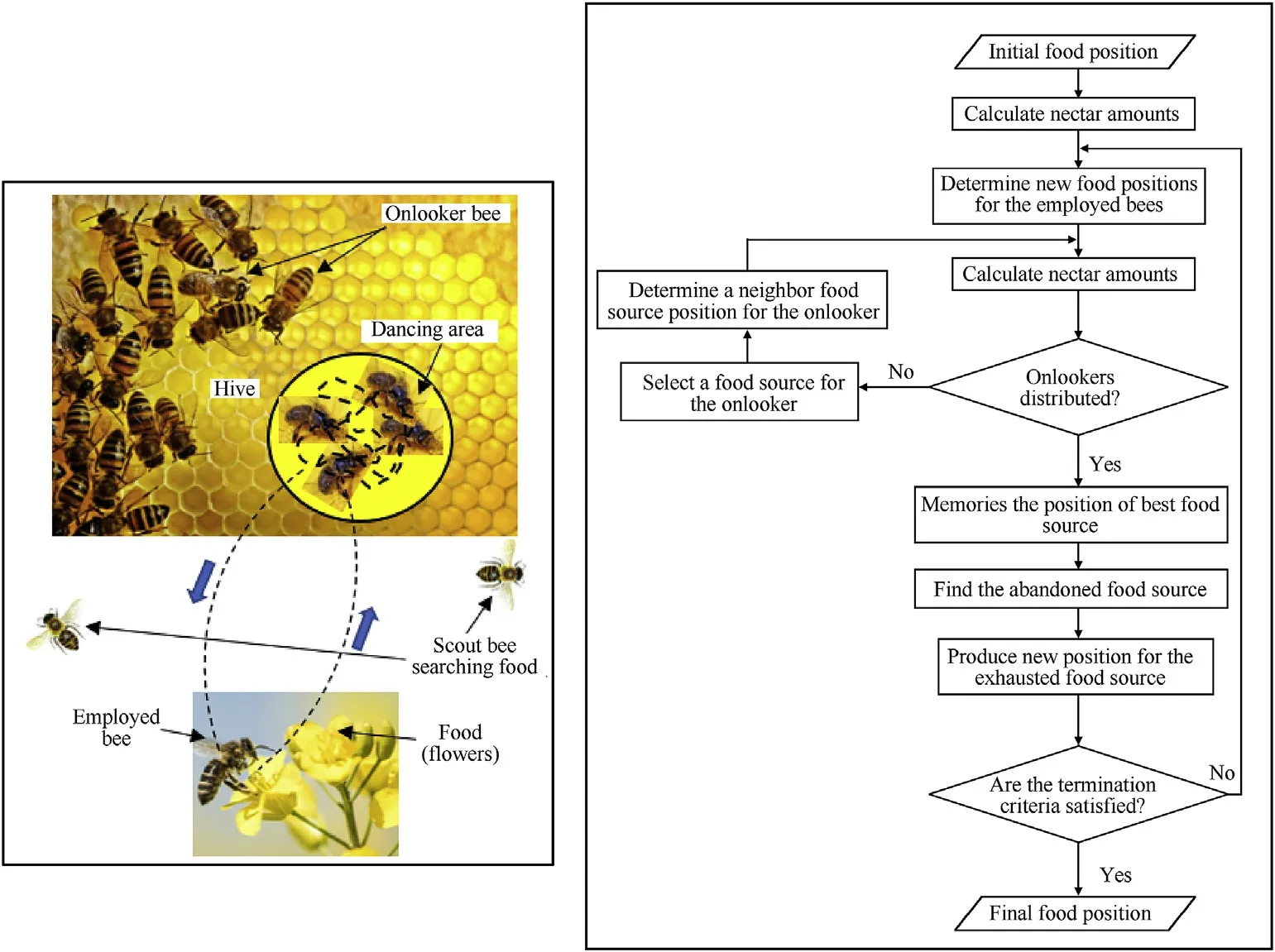
Fig.20.ABC structure with pseudo code.
·Sending the employed bees to a food source and evaluating the nectar quality.
·Determining the scout bees and sending them onto possible food sources.
The application of the ABC algorithm to mobile robot navigation in a static environment is presented by Contreras-Cruz et al.[176].The developed approach uses ABC for a local search and evolutionary algorithm to define the optimal path.Real-time experiments in an indoor environment are presented for result validation.A similar approach in a static environment is also presented by Saffari et al.[177]but results are limited to simulational environments.To meet the goal of navigation in a real-time dynamic environment,the ABC based approach is presented by Ma et al.[178].They presented a hybridized approach by combining the ABC algorithm with a time rolling window strategy.Multiple mobile robot navigation in an environment is a difficult task,the implementation of ABC is done successfully in a static environment by Bhattacharjee et al.[179]and Liang et al.[180].Similar to wheeled mobile robot navigation,the ABC algorithm is tested for aerial navigation[181],underwater navigation[182],and autonomous vehicle routine problems[183].UCAV path planning aims to obtain an optimal flight route in the 3D world by considering the threats and constraints in the combat field.Li et al.[166.1]addressed this UCAV navigation problem using an improved ABC algorithm.The ABC algorithm is modified by a balance-evolution strategy(BES)which fully utilizes the convergence information during the iteration to manipulate the exploration accuracy and to pursue a balance between the local exploitation and global exploration capabilities.Application of the ABC algorithm in the defence sector has been provided by Ding et al.[166.2].In their work,an unmanned helicopter has been tested for a challenging mission such as information gathering, accurate measurement, and border patrol.Based on the flight data collected from the experiments,they used a novel identification algorithm consisting of a chaotic operator and ABC controller to identify the unknown parameters of the two decoupled linear models.
2.2.9. Cuckoo search(CS)algorithm
The CS algorithm is a metaheuristic algorithm presented by Yang and Deb[186]in 2009.The algorithm is based on the lazy behavior of some cuckoos for laying their own eggs in the nests of other host birds.According to Yang,the algorithm follows three basic rules for an optimization problem as follows.
·Each cuckoo lays one egg at a time in a randomly chosen nest.
·The best nests with high-quality eggs will be carried over to the next generation.
·The number of available host nests is fixed,and the egg laid by a cuckoo may be discovered by the host bird with a probability pa∈(0,1).In this case,the host bird can either get rid of the egg or simply abandon the nest and build a completely new nest.
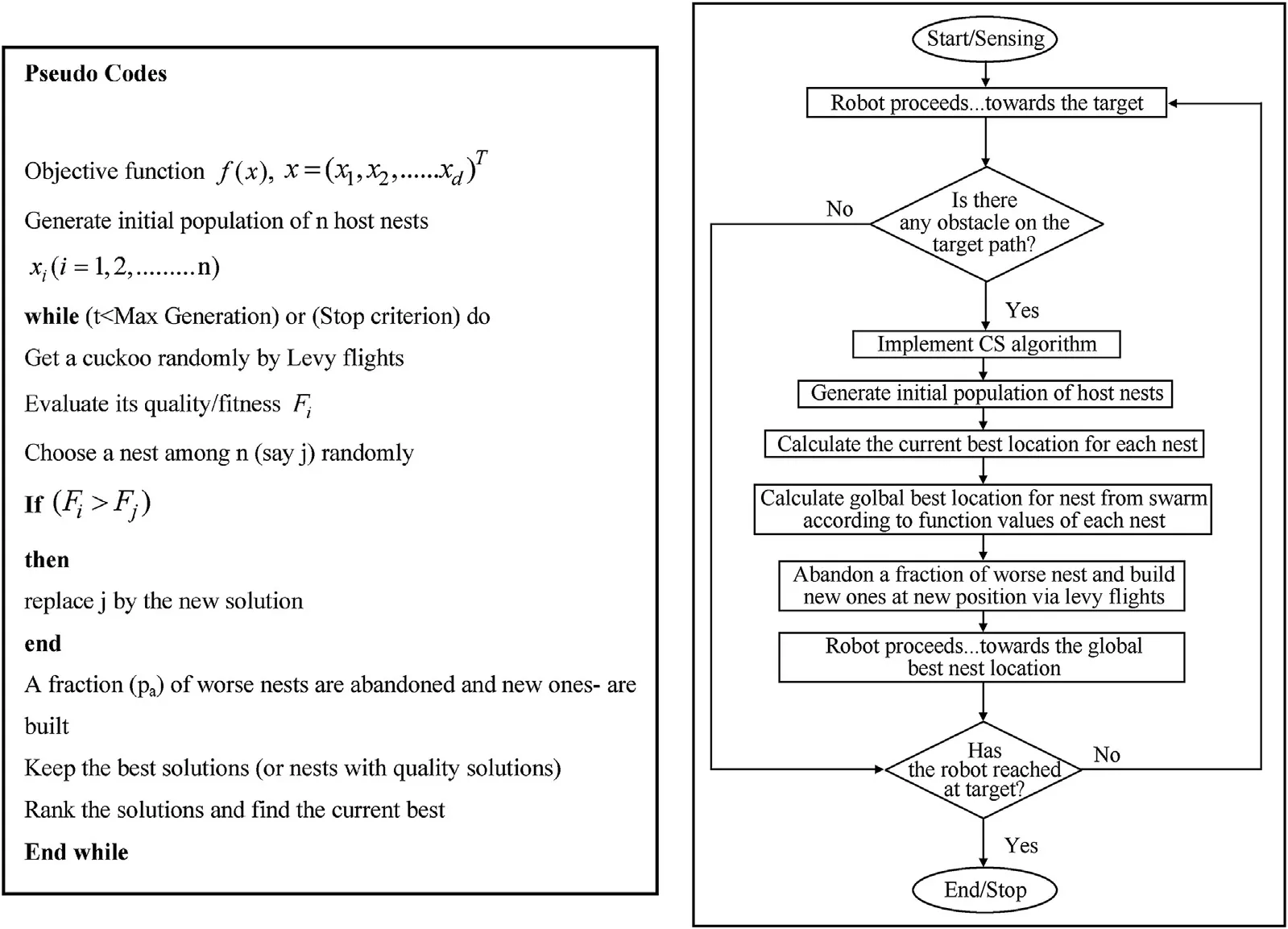
Fig.21.The pseudo code of CS and Flowchart for CS based mobile robot navigation[187].
The CS algorithm is an improved method because it increases the convergence rate and efficiency hence it is widely accepted in various engineering optimization problem;mobile robot navigation is one area where performance and computational time is to be optimized.The general flow chart of the CS algorithm is presented in Fig.21.Research papers using the CS algorithm in mobile robot path planning are limited as it is a newly developed algorithm.The algorithm for navigation of a wheeled robot in a static environment is provided by Mohanty et al.[187].The environment is partially unknown,and they have presented simulation and real-time experiments on a wheeled robot over the complex environment.The experimental and simulation results show good agreemnt as there is a much smaller deviation error.The CS-based algorithm performs well when hybridized with other navigational approaches.One such approach is provided by Mohanty et al. [188]; in that approach,a hybrid of CS and ANFIS was presented for obtaining better results of navigation in an uncertain environment.Another hybrid path planning approach for an unknown 3D environment is suggested by Wang et al.[189]by combining the differential evolution algorithm with CS to accelerate the global convergence speed.The increased convergence speed helps the aerial robot to explore the 3-D environment.An application of the CS algorithm for exploring the 3D environment especially for a battlefield has been presented by Xie et al.[170.1].In their work,the hybrid approach(including CS and differential evolution algorithm)has been demonstrated for solving the 3D aerial path planning problem.The differential evolution is applied to optimize the process of selecting cuckoos of the improved CS model where the cuckoos can act as an agent in searching the optimal path.
In the candlelight of the Christmas Eve services, the tablecloth looked even more magnificent. The white lace seemed dazzling in the flickering16 light of the candles, and the golden threads woven through it were like the brilliant rays of a new dawn.
2.2.10. Shuffled frog leaping algorithm(SFLA)
This is a metaheuristic optimization approach developed by Eusuff and Lansey[191]based on the behavior of frogs in search of food as shown in Fig.22.The SFLA has become popular in the field of engineering optimization. Characteristics such as improved convergence speed,easy to implement,fewer parameters,higher success rate and better search capacity in presence of uncertainty make it unique over other metaheuristic algorithms.Nowadays,the application of SFLA is commonly observed for engineering optimization problems and navigation of a mobile robot is a typical example.Ni et al.[192]have developed a path planning strategy based on the median strategy for avoiding a local optimal solution problem.They modified the fitness function for optimal path generation,obtaining the globally best frog,and its position is used to lead the movement of the robot in the presence of static and dynamic obstacles.A multi-objective approach based SFLA has been demonstrated by Hidalgo-Paniagua et al.[193]to achieve main targets of navigation such as path safety,path length,and path smoothness.The developed approach is then compared with the GA in a static condition;the result using the modified SFLA was much greater in the sense of path smoothness.A navigational strategy for 3D underwater conditions has studied and presented by Kundu et al.[194].In their work,an adaptive SFLA navigational strategy for dynamic conditions is used while tracking the target.With the use of the adaptation technique,the path and required time of navigation are optimized by avoiding local minima situations(Fig.23).Validation of simulation results with experimental results is presented with good agreement in a messy environment.A similar type of modified SFLA approach for mobile robot navigation is provided for solving UAV 3D path planning[195]and vehicle routing[196].For defence applications,Liang et al.[197]developed an SFLA-based flight control strategy for air-breathing hypersonic vehicles. To achieve the climbing, cruising and descending flight control,a modified SFLA with the proportional integral derivative method is designed including the height loop,pitch angle loop,and velocity loop.
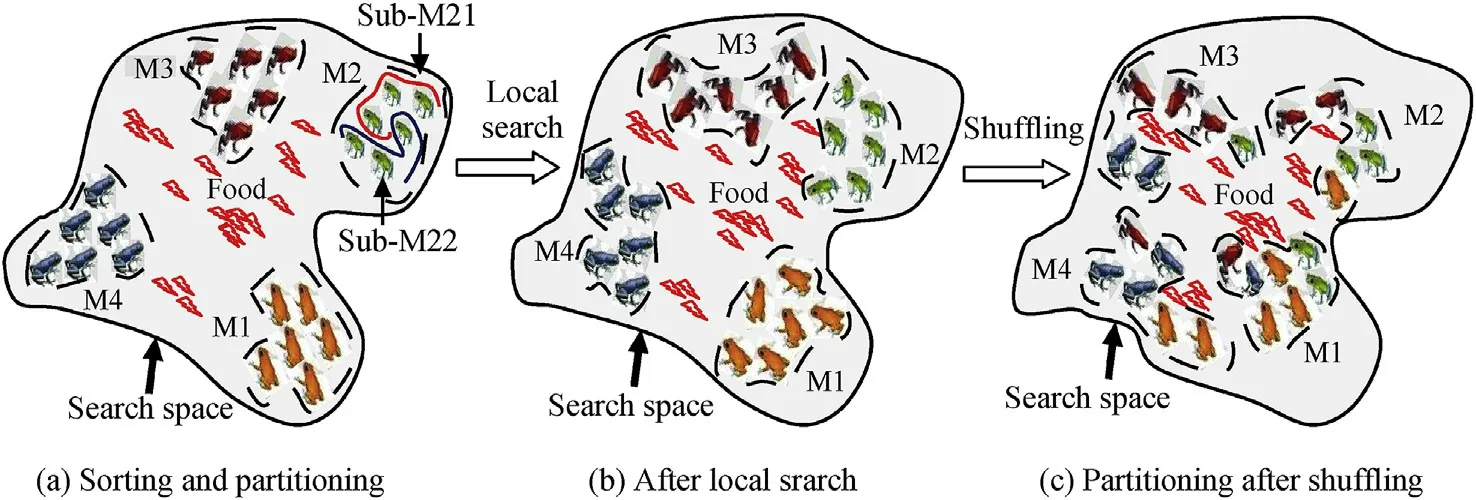
Fig.22.SFLA mechanism[194].
2.2.11. Other miscellaneous algorithm[OMA]
Many researchers gave different intelligent techniques to perform the task of mobile robot navigation in various environmental situations such as Invasive Weed Optimization(IWO)[198-200],Harmony Search(HS)Algorithm[201-202],Bat Algorithm(BA)[203-205],Differential Evolution(DE)Algorithm[206-208],reactive obstacle avoidance based on boundary following using sliding mode control[209],collision avoidance based on geometric approach[210-211]and many more.
3. Discussion
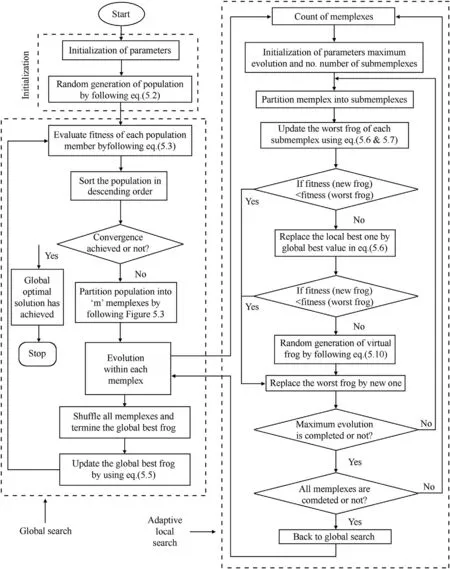
Fig.23.Flowchart for a proposed adaptive version of SFLA[194].
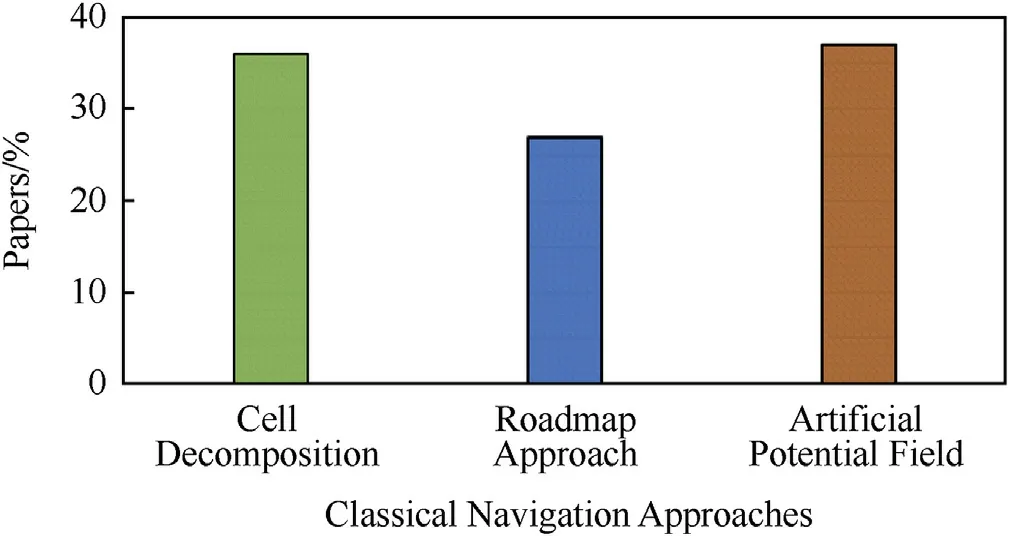
Fig.24.Classical Approaches comparison based on a paper published.
After a rigorous evaluation of the research papers cited in the literature,the navigational strategies are classified as classical approaches and reactive approaches.A few decades ago,most of the work in the field of robotics was conducted using classical approaches only.Classical methods have several shortcomings such as computational intensiveness,trapping in local minima,inability in handling maximum uncertainty,demand for precise information about the environment,the requirement of an accurate sensing mechanism for real-time navigation and many more.Hence,in the adoption of the classical approach,there always remains doubt whether a solution will be obtained,or it would be assumed that such a solution does not exist.The unpredictable and unreliable nature of these approaches makes their usage brittle in a real-time environment.Although many researchers have tried to estimate loopholes in the classical approaches and developed several new strategies such as APF and some hybrid algorithms,these strategies are not performing better in real-time conditions when compared to reactive approaches.Classical approaches are mainly adopted for navigation in a known environment as they require the initial information of the working environment.On the other hand,reactive approaches are used for navigation in an unknown environment due to their ability to tackle the high level of uncertainty present in the environment.They are easy to implement,intelligent and more efficient;hence they are used for real-time navigation problems and give optimal results over classical approaches.Although reactive approaches are than classical approaches, they still have several disadvantages such as longer computational time,complex design,necessary learning phase,requires large memory,and unsuitable for low-cost robots.In Figs.24—25,the comparison has been made based on the percentage of the paper published for individual classical and reactive approaches.
Table 1 provides a detailed analysis of the algorithms used for navigation of robots to date.The performance of each algorithm is judged based on parameters such as application as a hybrid algorithm,navigation in static and dynamic environments,application to multiple robot systems,results over simulational and real-time environments and kinematic analysis. Table 1 shows that research papers published on navigation of robots by using reactive approaches are comparatively more than classical approaches.In classical approaches,it is observed that the APF approach has been used very successfully for navigation of a robot around a static obstacle,dynamic obstacle,and for dynamic goal conditions;it is applied for multiple mobile robot systems and presented for realtime application as compared to CD and RA.For the hybrid navigation system,the cell decomposition approach has been used more than APF and RA.In classical approaches,it is observed that use of the APF approach has increased in the last two decades for solving the navigational problem of a robot in partially known and unknown environments as compared to CD and RA.The charts in Fig.26-28 clearly represent that research papers based on dynamic obstacles and goals,multiple robot navigation and real-time applications using classical approaches are very few compared to reactive approaches.
Nowadays,reactive approaches are more popular as they have the ability to deal an uncertain environment quickly with less computational effort.In Fig.29,implementation of classical and reactive approaches,arranged in decades,has been shown for robot navigation.It shows that the popularity of reactive approaches has increased from 0%to 95%,whereas the popularity of classical approaches has decreased from 95%to 5%in the year 1970—2018.In the 21st century,rapid growth is observed in the implementation of the reactive algorithm for mobile robot navigation.At the present time,more than 95%of work is being conducted using reactive algorithms only.Among the reactive approaches,the fuzzy-based approach is studied for path planning by various researchers followed by GA and NN respectively.In the field of mobile robot navigation,the contribution of algorithms such as FL,GA,and NN is more than 50%.The newly developed metaheuristic algorithms such as FA,PSO,ACO,ABC,CS,SFLA,and OMA are rapidly growing approaches in the field of mobile robot navigation and the applications of this algorithm are commonly seen everywhere.The contribution of this metaheuristic algorithm in the field of robot navigation is about 50%.From Table 1,most of the reactive approaches such as FL,GA,NN,ACO,PSO,and FA have been used for the navigation in a dynamic environment in the presence of moving obstacles and moving goals.Algorithms such as SFLA,PSO,ABC,and BFO are newly developed approaches which have been successfully used for navigation in the presence of moving obstacles only.All reactive and classical approaches can handle the real-time navigational path planning problem as a standalone controller with greater efficiency except RA and CD.Multiple mobile robot navigation is one of the most challenging tasks for path planning and it requires a high level of intelligence to coordinate the robots.Almost all approaches,except CD,RA,SFLA,BFO,and OMA,handle the multi-robot problem accurately without collision.To solve the complex problem of navigation many researchers presented a hybrid navigational approach and,from the literature review,it is observed that all approaches deal with it well except for SFLA,RA,CD and OMA.
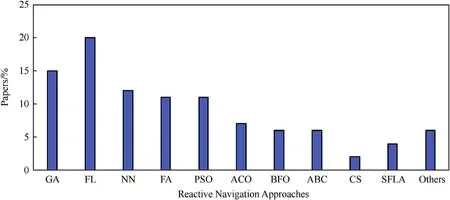
Fig.25.Reactive Approaches comparison based on a paper published.

Table 1 Analysis of various navigational techniques.

Table 1(continued)
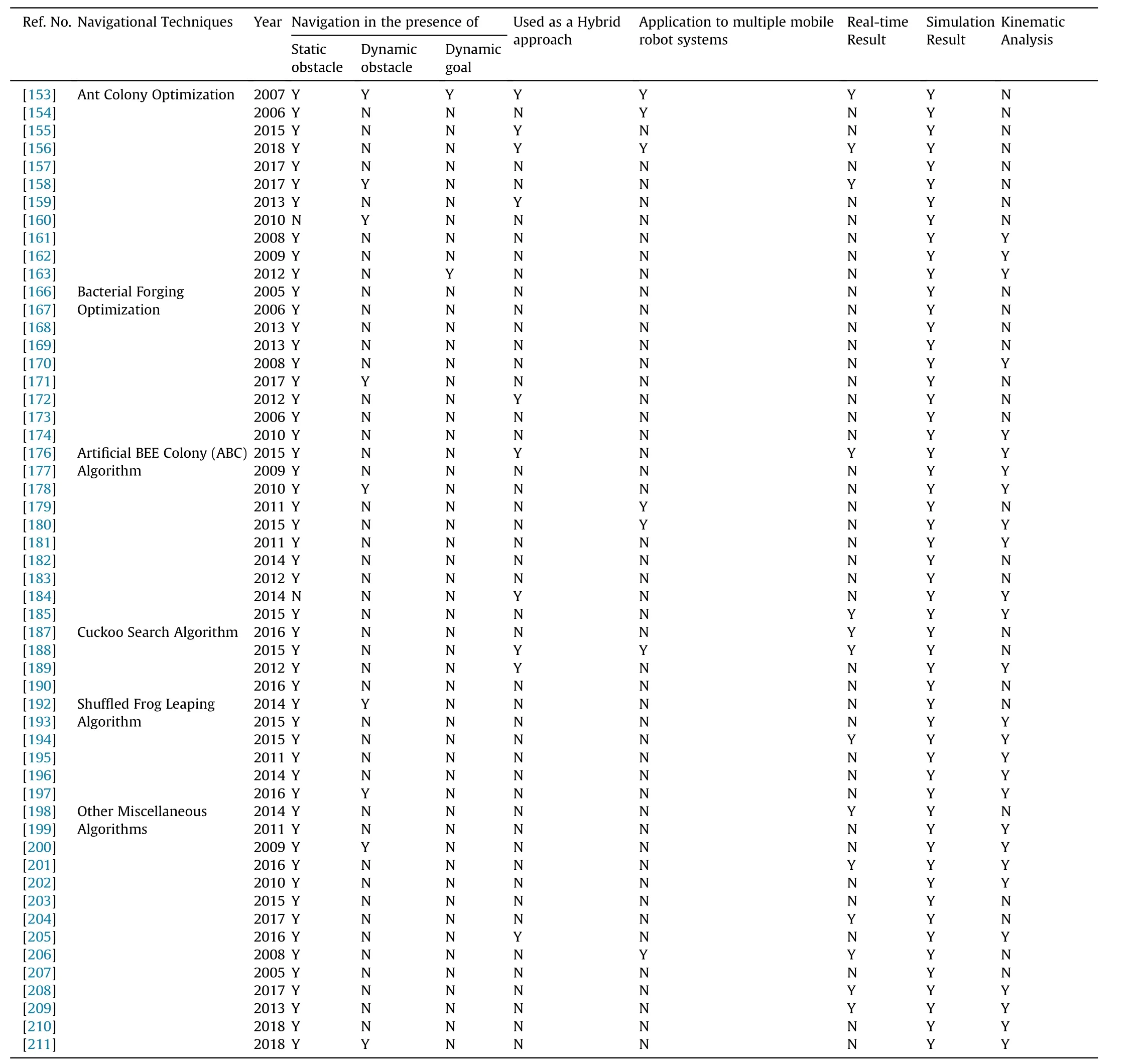
Table 1(continued)
The application of classical and reactive approaches has been studied over a 3D workspace for path planning of aerial and underwater vehicles.In Table 2,the applications of an individual algorithm for 3D path planning are shown and,from the data,it is clear that reactive approaches have been used more widely for exploring the 3D environment in the presence of maximum uncertainty compared with classical approaches.The classical approaches are not sufficiently intelligent for autonomous path planning in a 3D environment,hence to improve their performance they have been hybridized with the FL,GA,etc.Almost all reactive and classical approaches are used to tackle the path planning problem in an aerial environment.The exceptions are harmony search,differential evolution and reactive obstacle avoidance based on boundary following using a sliding mode control approach.Similarly;CD,RA,BFO,CS,IWO,bat algorithms have not yet used for underwater path planning of mobile robots.
The discussion is further continued over the use of navigational approaches for mobile robot navigation in military or defence applications.In military applications,it is observed that reactive approaches have been used more than classical approaches due to the high exploring capacity of the environment,efficient computing ability,quick action and response,flexibility in operation,advanced intelligence system and self-decision-making ability.For an accurate self-governing system,the equipment needs to have a reliable navigation system together with proper guidance and control to provide an appropriate path and to reach the destination.Nowadays,military equipment such as a submarine,anti-missile defence system,tanks,guns,drone,advanced war aircraft,missile,helicopter,etc.are used for dangerous situations and all these platforms use reactive intelligence approaches in partially and completely unknown environments.The reactive based algorithm provides the facility to handle these platforms without the physical presence of a human in the battle area and it can be controlled through a remote or GPS based system by sitting in a control room.In the future,it will be common to see solders are being replaced by robots and a technological war will result.In most defence equipment the FL,GA,and NN have been used as an intelligent approach for performing the task automatically.Classical approaches such as CD,RA and APF are not preferred for defence applications due to lack of intelligence,computationally intensiveness,trapping in local minima etc.
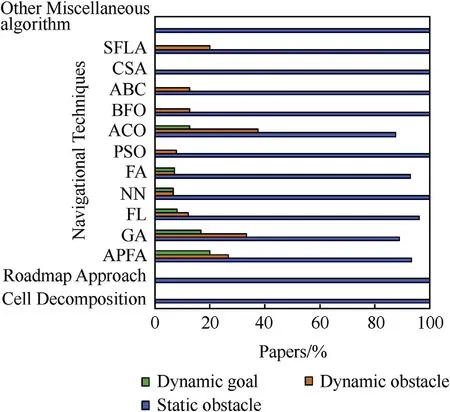
Fig.26.Analysis of navigational techniques based on navigation over static and dynamic(obstacle and goal)conditions.

Fig.27.Analysis of navigational techniques based on Real-time application and simulational application.
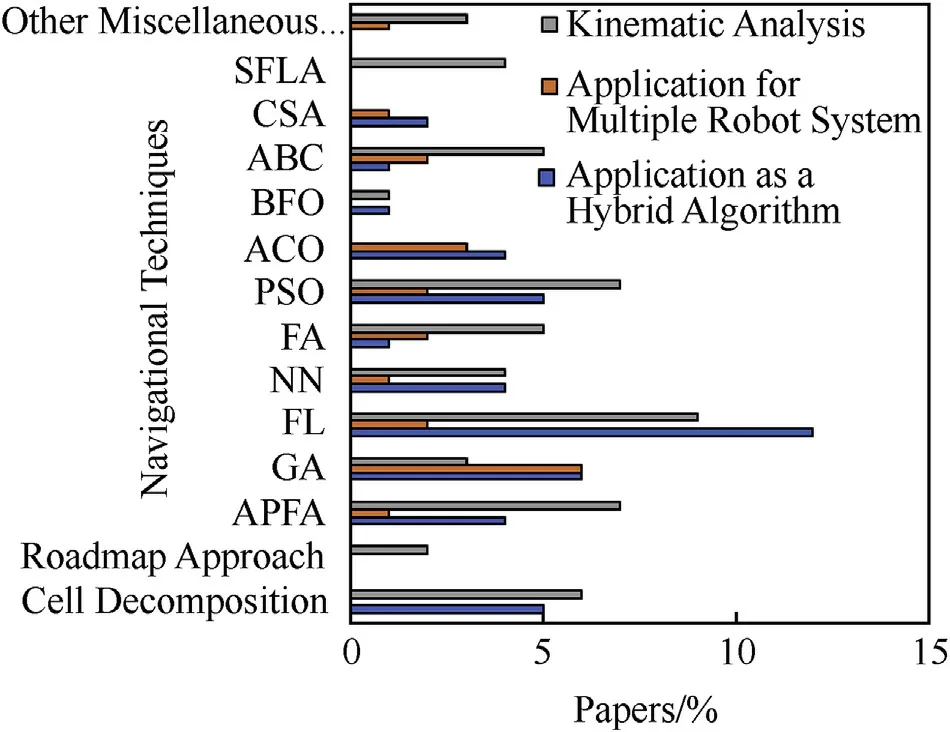
Fig.28.Analysis of navigational techniques for application as a hybrid algorithm,multiple robot navigation system and kinematic analysis.
4. Conclusion
This study on mobile robot navigation classifies the various methods into classical and reactive approaches.The key points of the study are as follows.
·Reactive approaches perform better than classical approaches because they have a higher capability to handle uncertainty present in the environment.
·Reactive approaches are most preferably used for real-time navigation problems.
·Very few research papers are published based on a dynamic environment compared with a static environment.
·In a dynamic environment,there are many fewer papers on navigation of a robot for a moving goal problem compared with a moving obstacle problem.
·To date,most papers demonstrate only a simulation analysis;papers on the real-time application are much fewer.
·Papers on the navigation of multiple mobile robot systems are few compared with the single mobile robot system.
·There are many fewer papers on hybrid algorithms compared with those on standalone algorithms.
·There is great scope in applying newly developed algorithms such as SFLA,CS,IWO,BA,HS,DE,BFO,ABC and FA for navigation in an unknown complex environment in the presence of maximum uncertainty and these can be used to develop new kinds of hybrid approaches.
·The performance of classical approaches can be improved by hybridizing with reactive approaches.
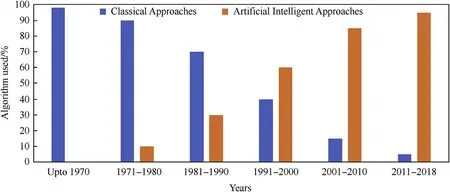
Fig.29.Development of mobile robot navigation approaches.
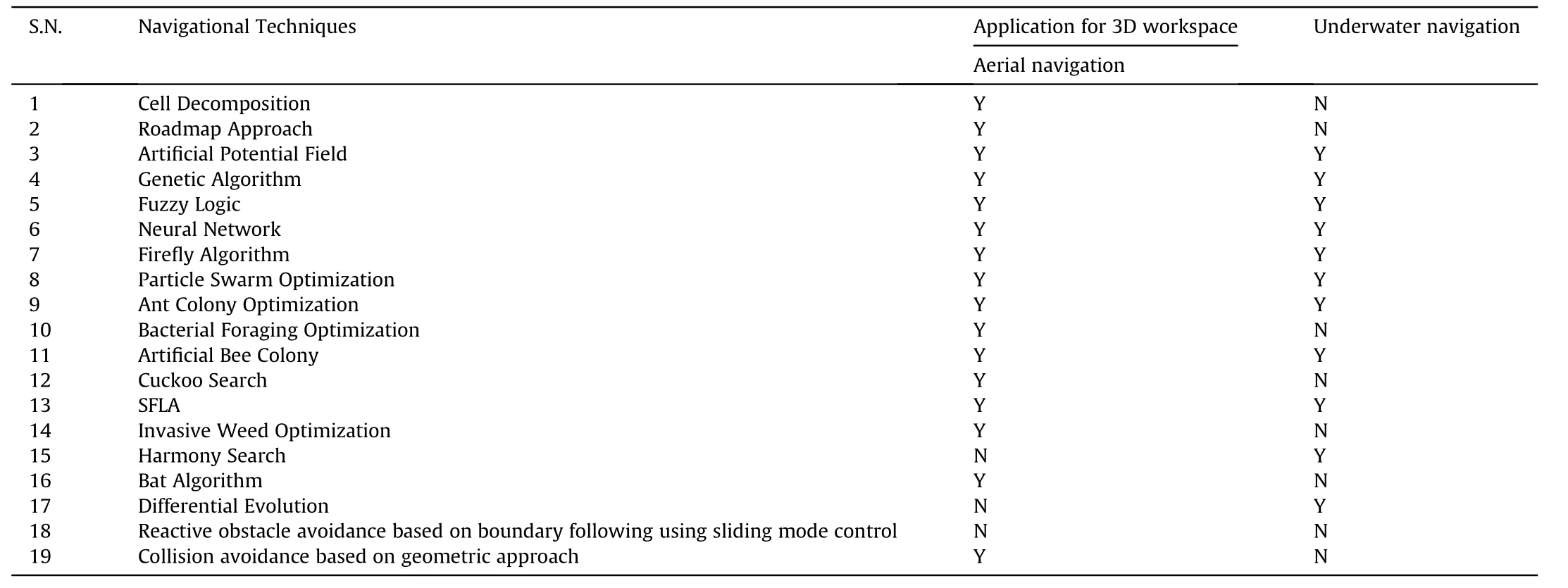
Table 2 Analysis of various navigational techniques in 3D workspace.
Acknowledgment
This work is not funded and supported by any organization or institute.
杂志排行

Defence Technology的其它文章
- Modeling on the shock wave in spheres hypervelocity impact on flat plates
- Insensitive high explosives:IV.Nitroguanidine—Initiation&detonation
- Effect of energy content of the nitraminic plastic bonded explosives on their performance and sensitivity characteristics
- Effect of wave shaper on reactive materials jet formation and its penetration performance
- A comparative study for the impact performance of shaped charge JET on UHPC targets
- The role of crystal lattice free volume in nitramine detonation