下肢康复训练机器人的自主交互控制方法*
2019-10-30张峥尹智晶刘晓宁封娇娇崔璐
张峥,尹智晶,刘晓宁,封娇娇, 崔璐
(战略支援部队特色医学中心医学工程科 ,北京 100101)
1 引 言
随着人工智能控制技术的发展,采用机器人进行下肢康复训练,可以提高下肢康复训练的人工智能性。下肢康复训练机器人良好的环境适应性和高度仿人性,在机器人设计中占据重要地位[1]。研究下肢康复训练机器人的优化设计方法,在下肢康复训练中运用交互控制设计,可以提高下肢康复训练机器人的环境适应性。下肢康复训练机器人的控制过程是通过分布式传感器进行环境信息采集,结合机器人的位姿参数调节来完成交互性控制,因此研究下肢康复训练机器人的交互控制方法具有重要意义。
传统方法对复合扰动下下肢康复训练机器人交互控制主要有动态跟踪测量控制方法和D-H参数调节控制方法[2]。Han等[3]提出一种基于动态跟踪测量的下肢康复训练机器人末端位姿优化控制方法,采用Kalman滤波方法进行下肢康复训练机器人康复训练和行走辅助控制的参数融合,但该方法的抗干扰性差,自适应性不强。王勋等[4]提出基于D-H参数调节的下肢康复训练机器人交互控制方法,结合滑模修正和反馈调节方法,实现复合扰动下下肢康复训练机器人位姿修正自主交互控制,但该方法的抗干扰性也差,自适应控制能力仍不强。针对上述问题,本研究提出基于单输出自适应前馈调节的下肢康复训练机器人康复训练和行走辅助控制位姿修正自主交互控制方法。采用分布式传感器阻力力学采集方法,进行下肢康复训练机器人的行为姿态参数采集,结合环境物理参数和机器人的位姿参数进行动态匹配和自动参量调节,实现机器人自主交互控制优化,最后进行仿真实验分析。
2 被控对象描述和控制约束参量分析
2.1 机器人的自主交互的被控对象描述
下肢康复训练机器人康复训练和行走辅助控制的基础在于姿态信息参量的采集[5],结合分布式传感器定位跟踪识别方法进行下肢康复训练机器人康复训练和行走辅助控制设计。采用分布式传感器阻力力学采集方法进行下肢康复训练机器人的姿态参量采集,结合传感器融合跟踪识别方法,得到整个下肢康复训练机器人的自主交互控制工作流程,见图1。
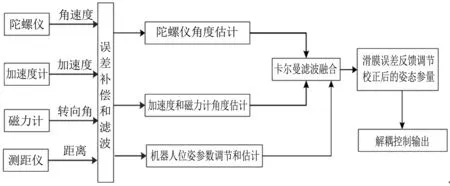
图1 下肢康复训练机器人位姿修正自主交互控制工作流程
Fig.1Work flow of position and pose correctionautonomous interactive control for lower limb rehabilitation training robot
根据图1,构建下肢康复训练机器人位姿修正自主交互控制约束参量模型和被控对象模型[6]。下肢康复训练机器人为一个刚体结构,采用鲁棒辨识方法进行机器人的2自由度空间模拟,仅受水平方向作用的影响,采用液压驱动控制方法构建下肢康复训练机器人的运动力学纵平面x1Oy1,在气动肌肉功率重量比控制下,机器人的质心运动状态可描述为:
(1)
在确定性的等效模型中,对下肢康复训练机器人的腿部关节进行模糊跟踪控制,构建关节重心到转动轴心的位姿参数分布模型[7]。在竖直分量和转动速度的等效约束下,下肢康复训练机器人在符合稳定收敛条件下的质心运动学模型描述为:
(2)
在躯干和肢体两部分进行动态调节,在机器人的髋关节处安装下肢康复训练机器的传感器[8],结合动力学耦合控制方法,得到下肢康复训练机器人肌肉输入气压模型描述为:
(3)

2.2 控制约束参量分析
采用分布式传感器阻力力学采集方法进行下肢康复训练机器人的行为姿态参数采集,结合环境物理参数和机器人的位姿参数进行动态匹配和自动参量调节,计算k时刻机器人的结构对称正向逆动态模型mj(j=1,2,…m) ∀mj∈M,得到膝关节中 2 根气动肌肉的控制函数:
Λj(k)=P(z(k)/mj(k),zk-1)

=N((zj(k)-zj(k/k-1))|0,Sj(k))
(4)
式中,Λj(k)服从均值为0、方差为Sj(k)的正态分布,Sj(k)为膝关节的偏置气压,构建差异性分布的协方差矩阵,令髋关节和膝关节的等效质量满足mj(j=1,2,…m) ∀mj∈M。根据足底与地面接触冲击进行适应性调节,得到机器人地面环境适应校正输出模型为:
uj(k)=P(mj(k)/zk)
(5)
当初始时刻的质心相对水平位移确定时,计算出地磁场沿x轴和y轴的分量mx和my,并计算下肢康复训练机器人康复训练和行走辅助控制的磁航向角Hm,其中:
(6)
构建下肢康复训练机器人康复训练和行走辅助控制位姿修正自主交互控制的约束参量模型[9],考虑关节动量变化,采用姿态参数优化估计方法进行位姿修正,构造下肢康复训练机器人末端位姿的状态方程和观测方程的离散形式为:
(7)
其中,wi(k)和vi(k)为两关节的转动角度,根据对机器人的末端位姿的跟踪测量结果进行稳定性调节的位姿修正自主交互控制。
3 控制算法优化
3.1 机器人的位姿动态匹配和自动参量调节

(8)
可用4×4 的齐次坐标矩阵IT0(α0,β0,γ0)表示(≡IT0(θ1,θ2,θ3)),下肢康复训练机器人康复训练和行走辅助控制作用力矩的地面反力冲量是线性变化的,表示为Σ7,基于上界的滑模控制方法,在位姿参数调节下Σ0,下肢康复训练机器人转动角度误差描述为:
(9)
建立单腿拉格朗日动力学空间分布向量,其元素构成的等式可得:
q1=θ4=atan2(±p4y,±p4x)
(10)
q2=θ5=atan2(-p4z,c1p4x+s1p4y-ls)
(11)
构建下肢康复训练机器人康复训练和行走辅助控制位姿修正自主交互控制的约束参量模型和控制目标函数,求得q3和q4:
q3=atan2(-s1p4x+c1o4y,-s2c1o4x-s2s1o4y-c2o4z)
(12)
q4=θ7atan2(c2c1n4x+c2s1n4y-s2n4z,c2c1a4x+c2s1a4y-s2a4z)
(13)
以此类推,进行机器人的位姿动态匹配和自动参量调节[11],在7自由度空间内下肢康复训练机器人康复训练和行走辅助控制的姿态定位被控对象模型描述为:
4T5-1(qi)·4T7=∏7i=6i-1Ti(qi)
(14)
式(14)也可作为下肢康复训练机器人作业的IK解析方程式,对方程式进行优化解算,求得机器人的髋关节和膝关节等效质量[12],设计滑模函数,结合稳定性调节方法,实现下肢康复训练机器交互控制。
3.2 控制律设计
构建下肢康复训练机器人康复训练和行走辅助控制位姿修正自主交互控制的约束参量模型和控制目标函数[13],为:
(15)
其中,w(k)∈Rn,表示下肢康复训练机器人膝关节的角位移和角速度,即w(k)∈L2(0,),A,B,C,D,F1,F2为周期稳定步态的微调权重矩阵,变量n为正整数,ΔA1,ΔB1为下肢康复训练机器人的活动关节的扰动增量,在模型相关参数约束下,下肢康复训练机器人的模糊动态控制模型表达形式为:
ΔA1=GFA1,ΔB1=GFB1
(16)
其中,G∈Rr×l,A1∈Rl×p,B1∈Rl×q为下肢康复训练机器人康复训练和行走辅助控制动作的姿态融合4元素矩阵,F∈Rl×l为康复训练和行走辅助控制的空间融合矩阵,采用单输出自适应前馈调节方法进行位姿参数调整[14],机器人主动支链的动力学耦合特性满足条件FTF≤I,下肢康复训练机器人的运动姿态参数r,l为正整数,并记为:
(17)
ΔVk=Vx(k+1)-Vx(k)
=xT(k+1)Px(k+1)-xT(k)(P
-KTRK)x(k)-xT(k-τk)KTRKx(k-τk)
(18)
当w(k)=0时,
(19)
根据Lyapunov稳定性原理,当且仅当存在一个常数ε>0,得到单腿动力学模型的状态空间矩阵满足Y+εHHT+ε-1ETE<0,耦合强度系数M={mi|i=1,2,…,m},由此构建下肢康复训练机器人康复训练和行走辅助控制位姿修正自主交互控制模型,实现控制算法的优化设计[15]。
4 仿真实验分析
为了验证本研究方法在实现下肢康复训练机器人交互控制和参量优化中的应用性能,进行仿真实验。仿真实验建立在Matlab 7.0仿真软件基础上,下肢康复训练机器人样机采用Mechanical 2017型下肢康复训练机器人,并使用本研究的自适应调节方法对机器人的位姿参数进行调节。机器人样机见图2。
设定下肢康复训练机器人的转动惯量为2.34 rad/s, 阻尼系数为1.25,髋关节偏置气压为125 KPa,气动肌肉的初始气压为0.25 KPa,控制参数见表1。
其中康复区域为下肢的不同部位,康复区域1代表髋关节,康复区域2代表膝关节,康复区域3代表小腿侧区,康复区域4代表踝关节。接触点的水平位移即下肢不同康复区域与机器人的接触点在水平方向上需要移动的距离。垂直距离表示不同康复区域之间的距离,髋关节与膝关节之间的垂直距离为51.34 cm,膝关节与小腿外侧之间的垂直距离为20.56 cm,小腿外侧与踝关节之间的垂直距离为20.32 cm,其中99.22 cm是髋关节与踝关节之间的垂直距离。
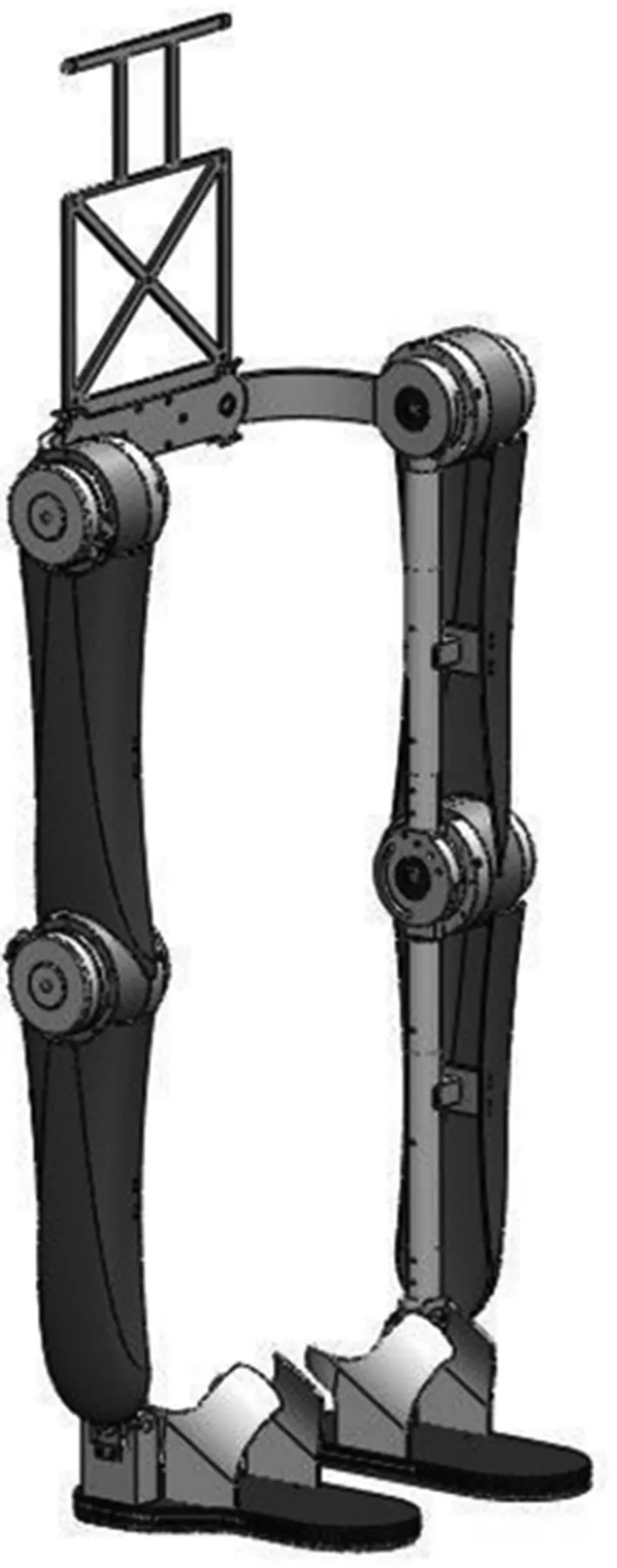
图2 下肢康复训练机器人样机Fig.2 Robot prototype forlower limb rehabilitation training
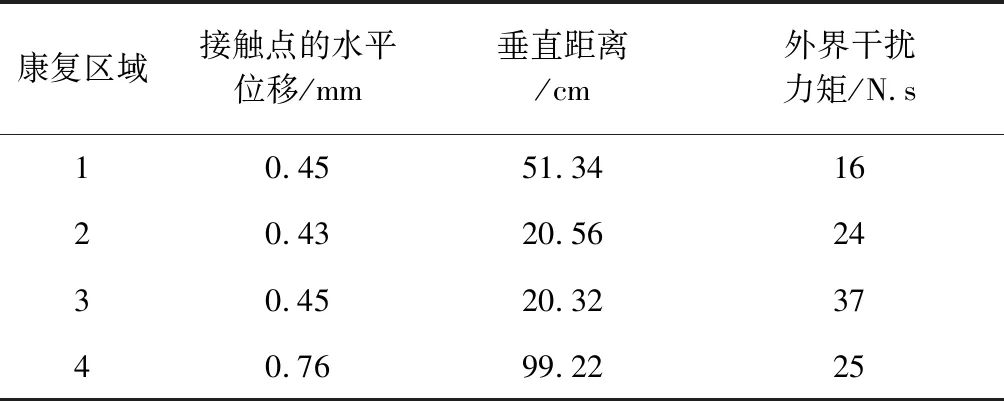
表1 控制参数分布Table 1 Control parameter distribution
根据上述仿真环境和参数设定,进行下肢康复训练机器人交互控制,采用分布式传感器阻力力学采集方法进行下肢康复训练机器人的行为姿态参数采集,见图3。
以图3的采样数据为输入,采用模糊约束控制方法进行机器人的位姿参数调整,在行为学空间内实现机器人的位姿修正和动态稳定性控制,得到控制输出,见图4。
由图4可看出,采用本研究方法能有效实现下肢康复训练机器人康复训练和行走辅助控制,控制过程的收敛性较好,测试不同方法进行控制的精度,得到对比结果,见表2。由表2可知,本研究方法进行下肢康复训练机器人康复训练和行走辅助控制的精度较高。
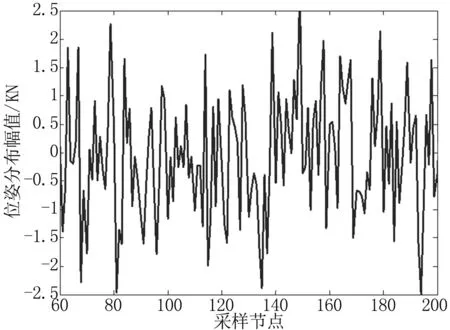
图3 机器人的控制姿态参数采集Fig.3 Acquisition of control attitude parameters of robot
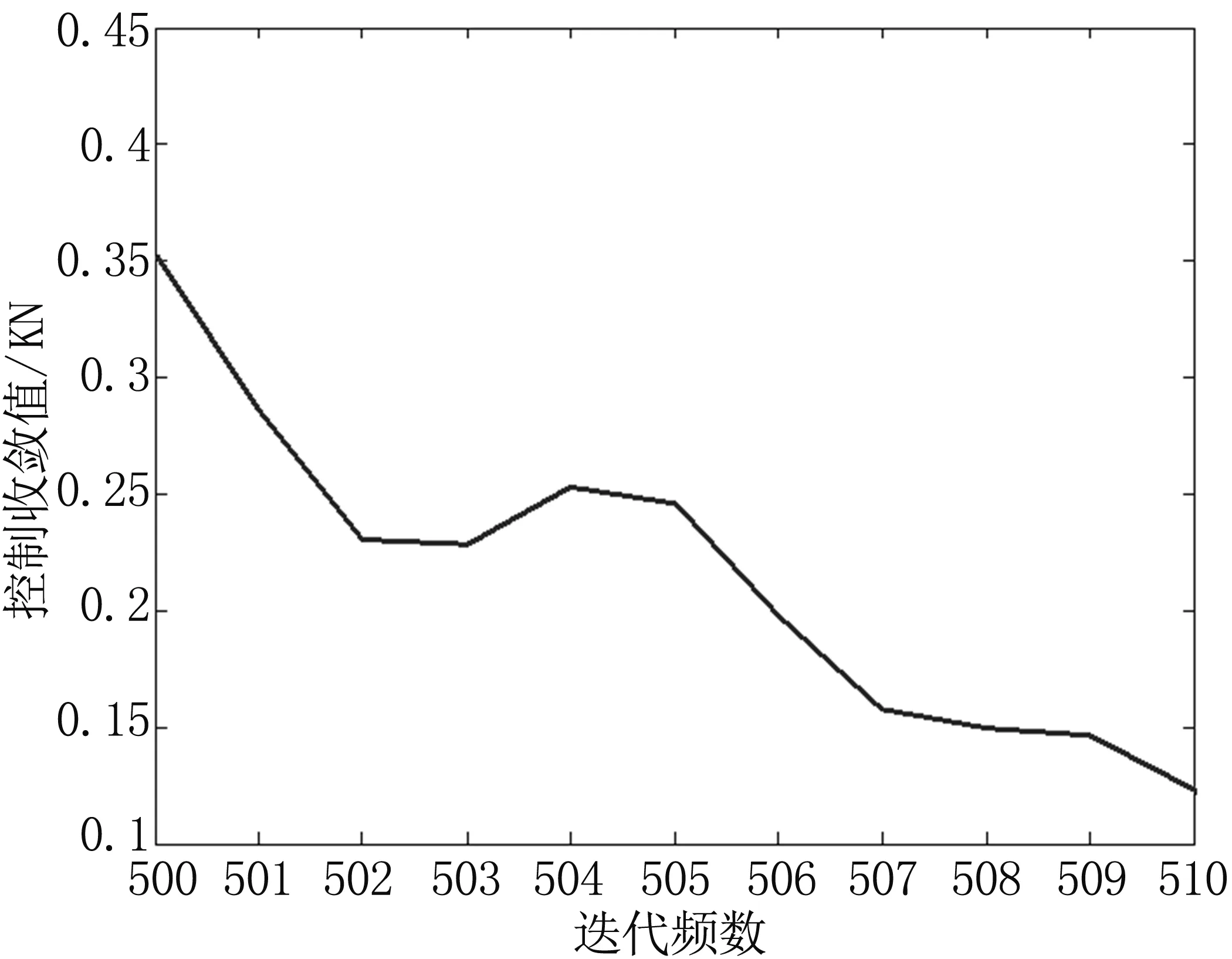
图4 控制性能曲线Fig.4 Control performance curve表2 控制精度对比Table 2 Control accuracy comparison

迭代次数本研究方法PID积分控制1000.8970.7640.8562000.9430.8640.8793000.9670.8900.8904000.9800.9030.912
5 结语
结合对下肢康复训练机器人的步进控制,提高下肢康复训练机器人的人工智能性,本研究提出一种基于单输出自适应前馈调节的下肢康复训练机器人康复训练和行走辅助控制位姿修正自主交互控制方法。通过试验分析得知,采用该方法进行下肢康复训练机器人的自主交互控制的输出稳定性较好,环境适应力较强。
