利用自制杠杆平衡仪探究杠杆的平衡条件
2019-10-30刘信生邢海根
刘信生,邢海根
(1.龙桥镇初级中学,安徽 庐江 231555;2.庐江第四中学,安徽 庐江 231500)
在探究杠杆平衡条件实验中,调节杠杆在水平位置平衡,得出实验结论是杠杆平衡中的最简单的最常见的特例,教材只安排这一最简单的探究,目的是降低探究的难度,让学生在分组实验中更容易操作,更容易得出结论. 但这种做法没有考虑到学生可能得出特殊结论,如“动力乘以支点到动力作用点的距离等于阻力乘以支点到阻力作用点的距离”. 另外,往往使学生形成思维误区,如杠杆必须在水平位置平衡. 所以教学中教师不能停留在只探究杠杆在水平位置平衡的层面,应该让学生探究非水平位置以及力与杠杆不垂直等情况下的杠杆平衡条件,做到探究与再探究,甚至是多个力作用下的杠杆平衡.
1 杠杆的重心在经过支点的竖直线,对实验没有影响
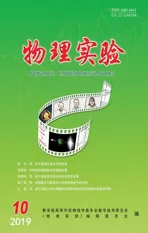
组装好杠杆,调节杠杆两端的平衡螺母使杠杆在水平位置平衡,杠杆处于静止状态,根据二力平衡原理得出杠杆的支持力和其自身的重力在同一条竖直线上,因此杠杆的重心一定在支点所在的竖直线上,如图1所示. 这时杠杆自重的力臂为0,可以避免杠杆的自重对实验的影响. 若采用两边挂钩码,使杠杆仍在水平位置平衡,这时动力与阻力的力臂都落在杠杆上,可方便测力臂.
杠杆在与水平线任意角度的位置静止,这时杠杆仍受平衡力的作用,杠杆的重心必定在支点的正下方,如图2所示,其力臂仍然为0. 所以,杠杆自重对实验仍无影响. 但此时,若采用两边挂钩码,使杠杆仍在原来位置平衡,这时动力与阻力的力臂都不在杠杆上,不方便测力臂.
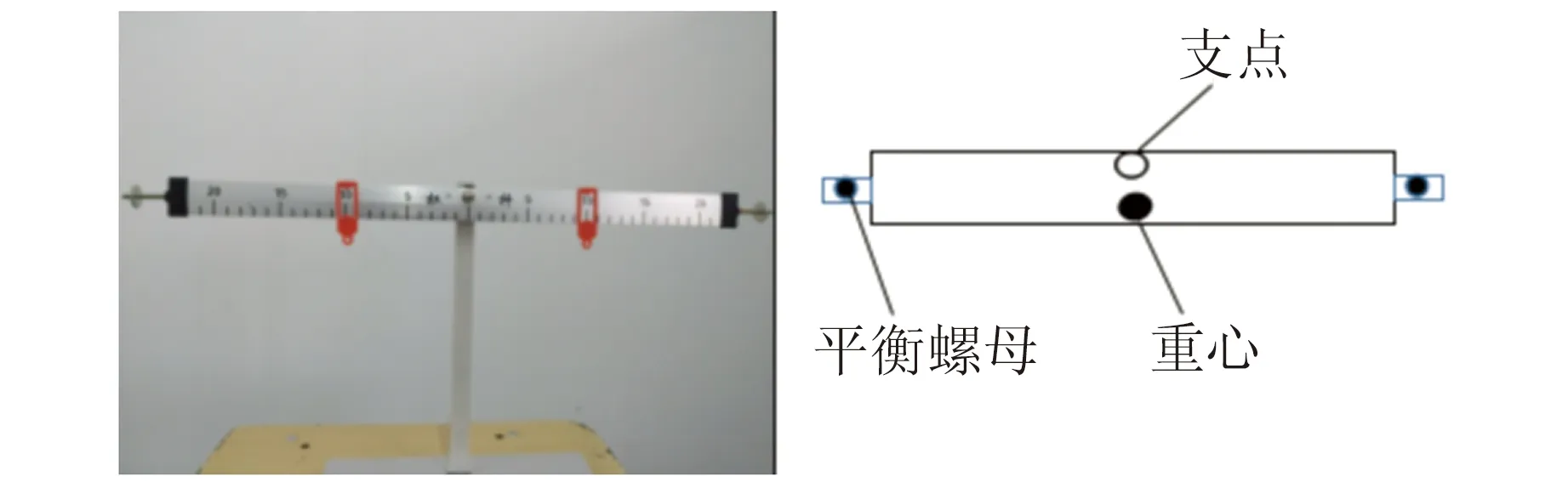
图1 杠杆水平平衡

图2 杠杆倾斜平衡
针对以上问题制作了力臂测量仪,探究了杠杆的平衡.
2 自制杠杆平衡仪,测任意角度力的力臂
自制的杠杆平衡仪如图3所示,主体结构为不锈钢毫米刻度尺6把(量程30 cm)、演示杠杆、测力计(0~5 N)、免漆板、重垂线等. 辅助结构为激光十字仪、光具座、充电宝、伸缩天线杆,如图4所示.
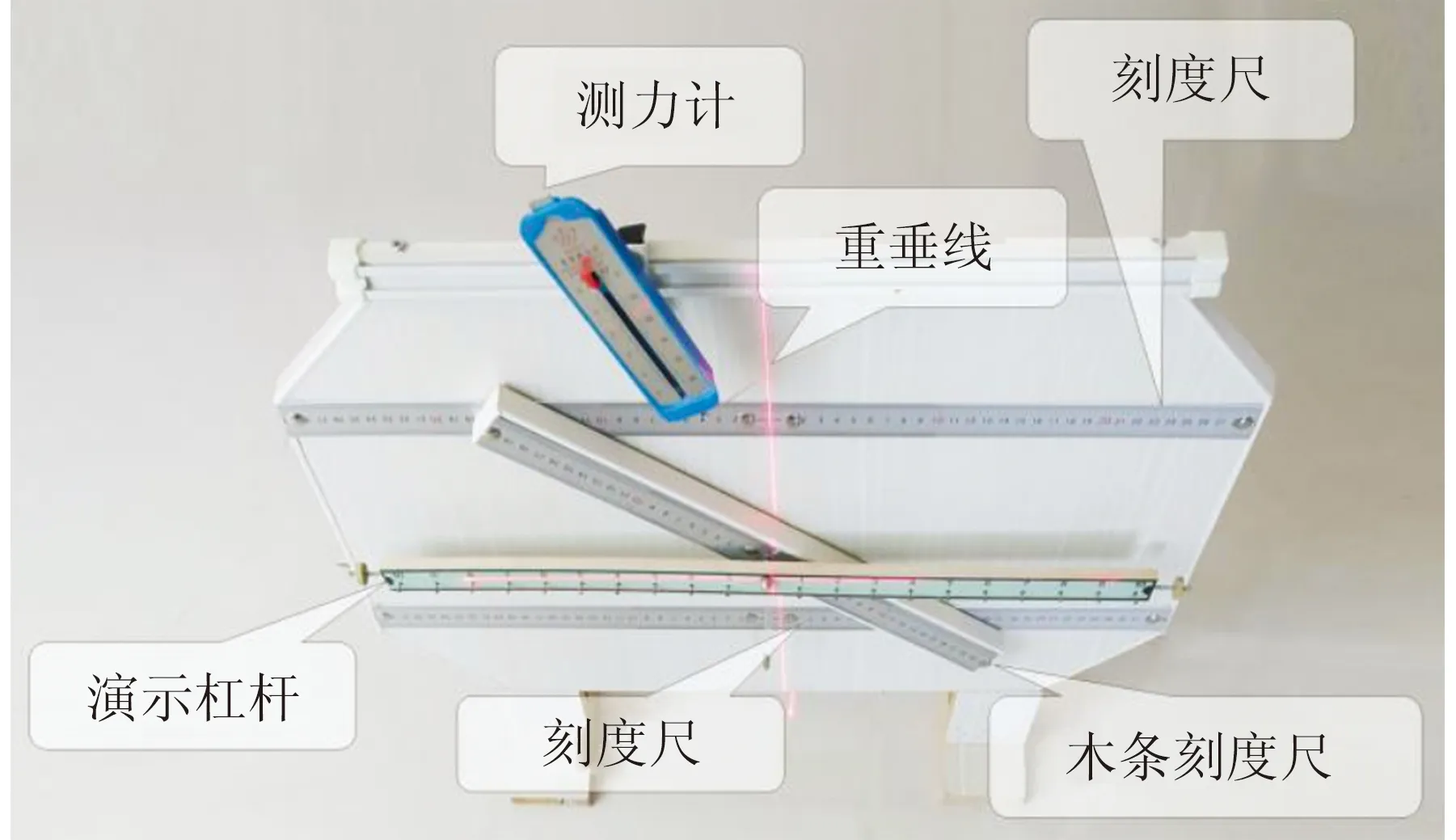
图3 自制杠杆平衡仪
图4 辅助结构
器材组装:
1)在免漆木工板的中心固定轴上安装长木条,表面嵌有2把不锈钢刻度尺,使2把尺子的零刻度线与转轴位置重合.
2)在相同的转轴上,长木条前方再安装演示杠杆,使其自由转动,转轴下悬挂小重锤.
3)在免漆木工板上方安装窗帘滑道,滑道内有1块金属滑块,滑块可以在窗帘滑道左右移动,在滑块前后方向开1个小孔,插入带有螺帽的细螺丝钉,螺丝钉的钉帽前段焊接微型万向转轴,再在前端用强力胶粘上测力计的后盖,使测力计整体可以在竖直平面内自由转动,也可以调节螺丝钉,使其前后移动,使测力计和演示杠杆在同一平面内,保证测力计正确测量.
4)在演示杠杆上、下2行位置均固定相互平行的2把不锈钢毫米刻度尺,这6把钢尺的零刻度线在竖直位置均对齐(钢尺的零刻度线以外的空白部已打磨掉).
5)在光具座支架上固定可收缩天线,在天线杆顶端固定红外激光十字仪,打开激光十字仪,发出2条相互垂直的激光,从正面照射在免漆木工板上,上下、左右调节光具座上的激光十字仪,使一条光线与力的作用线重合,另一条光线经过杠杆的支点,这时支点到力的作用线之间的激光束的线段长即力臂的长度,转动钢尺,使钢尺的边缘与激光线平行,即可利用钢尺测出力臂的大小.
3 杠杆平衡的探究与再探究
3.1 探究动力、阻力与杠杆垂直,杠杆在水平位置平衡的条件
1)上下移动激光十字仪,使十字交点正对杠杆支点,一条光线与重垂线重合,这时另一条光线处于水平位置,调节杠杆两端的螺母,使杠杆在不挂钩码时与水平光线重合,这时杠杆便在水平位置平衡.
2)在杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆再次在水平位置平衡,如图5所示. 这时杠杆两端受到的动力或阻力大小等于所挂钩码的重力.

图5 杠杆水平平衡
3)支点右边的钩码对杠杆的拉力为动力F1,右侧悬挂点到支点的距离为动力臂L1;支点左边的钩码对杠杆的拉力为阻力F2,左侧悬挂点到支点的距离为阻力臂L2,记录测量数据.
4)改变力和力臂的大小,再重复实验.
3.2 探究动力与杠杆不垂直,杠杆在水平位置平衡的条件
1)重复3.1中的第1)步操作.
2)在杠杆支点任意一边加挂钩码,用弹簧测力计竖直或者倾斜施力拉住杠杆使其在水平位置再次平衡,如图6所示.

图6 动力与杠杆不垂直时杠杆水平平衡
3)在光具座上左右移动安装有红外线激光十字仪的伸缩天线杆,同时将天线杆向下伸缩,同时旋转红处激光十字仪,使十字形的激光束分别通过支点与拉力的作用线,找到拉力的力臂位置. 转动木条刻度尺测出动力臂L1,读出测力计拉力读数F1,算出钩码的总重F2,读出对应的力臂L2,记录数据.
3.3 探究动力、阻力与杠杆不垂直,杠杆在非水平位置的平衡条件
1)任意旋转杠杆的平衡螺母,使杠杆不在水平位置静止,然后转动杠杆后面的长木条刻度尺使其与杠杆重合(以正视时看不到木条尺为准),确定杠杆不挂钩码静止时的位置.
2)在演示杠杆的一端加挂钩码若干个,再用弹簧测力计挂钩拉住杠杆,在滑道内左右移动测力计的悬挂滑块,再次让杠杆与后面的长木条尺重合,如图7所示,读出测力计示数F1,算出钩码总重F2.

图7 动力及阻力与杠杆不垂直时杠杆在非水平位置平衡
3)再次移动红外激光十字仪,并转动红外激光十字仪,使其一条光与测力计拉力的细线重合,另一条光线过杠杆的支点,显示出力臂的位置,转动长木条尺,使其与力臂位置重合,读出拉力的力臂L1,再次移动红外十字激光仪,测出钩码对杠杆拉力的力臂L2,记录数据.
4)整理数据,分析归纳结论.
3.4 数据整理与分析
在不同条件下进行实验,收集和整理实验数据如表1所示. 由表1可知在误差允许的范围内能很快得出杠杆的平衡条件. 可见无论杠杆在水平位置平衡还是在倾斜位置平衡,动力或阻力垂直于杠杆还是动力或阻力与杠杆不垂直,杠杆的平衡条件都是相同的.
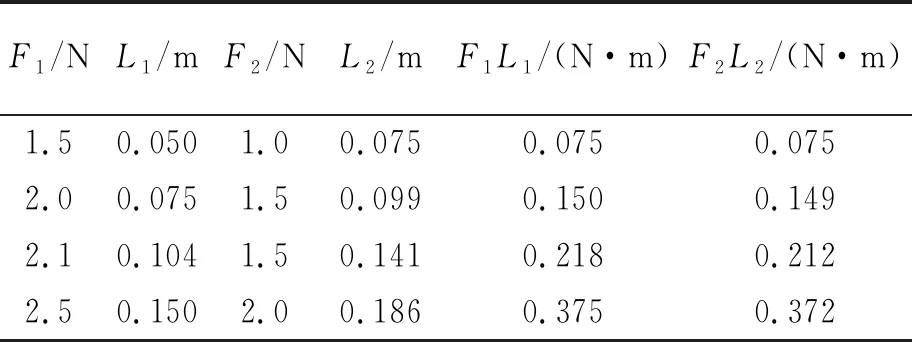
表1 实验数据的收集和整理
当动力或阻力与杠杆不垂直时,还可直接在演示杠杆上读出“支点到动力作用点的距离”与“支点到阻力作用点的距离”,将这2个数据代入“动力×支点到动力作用点的距离”及“阻力×支点到阻力作用点的距离”,便可发现两者不相等. 但动力与阻力都与杠杆垂直时,两者相等. 说明动力与阻力都与杠杆垂直时,不仅能得出杠杆平衡条件,还能得出以上的特殊结论.
4 结束语
该设计实验可使学生认识到只要杠杠自身重力的力臂大小为0,杠杆处于任意位置静止时,都可探究出杠杆平衡条件. 当杠杆自身重力的力臂为0,实验时将杠杆调到水平位置平衡,避免杠杆自身重力对实验的影响,便于从杠杆上直接读出力臂的大小,但杠杆不是必须要在水平位置平衡.