截流板式减摇系统在高速船上的应用
2019-10-30夏敬停马雪泉李传庆张亚楠
夏敬停, 马雪泉, 李传庆, 张亚楠
(1. 上海市航务管理处, 上海 200080; 2.上海船舶运输科学研究所,航运技术与安全国家重点实验室, 上海 200135)
高速船在海上航行时,不可避免地受到风浪和海流等影响,其摇荡与船体振动幅度远远超出常规营运船舶,对船员的正常工作和船舶运输效率造成极大影响,特别是相对于常规船舶,其横摇和纵摇的耦合运动更加明显。研究新型减摇装置,对改善高速船的耐波性、提高船员舒适性和保护设备安全具有重要意义。
主动式减摇系统目前在高速船上的应用已经较为广泛,随着船舶向自动化、现代化发展以及控制理论和技术研究的深入,更多控制方法和建模方法被广泛应用于船舶减摇技术研究,如非线性处理、比例-积分-微分(Proportion Integral Differential, PID)控制、自适应控制等[1-2],弥补了传统减摇装置的不足,提高了减摇系统的适应性和减摇效率。主动式减摇已成为目前极具发展前景的研究方向。
1 常规减摇装置简介
船舶减摇一直是船舶领域备受关注的研究内容之一,舭龙骨、减摇水舱、减摇鳍、舵减摇和截流板等减摇装置被广泛应用于各类船舶。这些减摇装置具有各自的优势,并且逐渐向自动化、小型化发展,满足不同类型船舶的减摇需求。[3]
1) 舭龙骨是最早出现、最为常用的减摇方式之一。其安装在船体舭部,通过扰动流场增加船体阻尼来减少船舶的横摇。舭龙骨不需要额外的驱动和运动结构,基本上不需要专门的维护,现在船舶几乎都安装有舭龙骨,但因其减摇效率较低并且会在一定程度上增加船体阻力,一般配合其他减摇装置来综合改善船舶的耐波性。
2) 减摇水舱的减摇效果与航速无关,可在高航速下保持良好的减摇效果,成本较低,可靠性高,但其大量占用舱内空间。减摇效率相对较高的主动式减摇水舱需要较大的驱动功率,对于主要进行短时间高速作业的船舶,减摇水舱增加了船舶空间成本和运行成本。
3) 减摇鳍是目前最为常用的主动式减摇装置,也是减摇效果最好的装置之一,其结构形式、使用条件的多样性使其具有较为广泛的适用性,特别是在高速条件下具有良好的减横摇效果。可收放式减摇鳍能在无需减摇时收起,避免在静水时增加船舶航行阻力。但是减摇鳍的结构较为复杂,维修成本也较高,并且只有在达到一定航速时才会有明显的减摇效果。目前,也有一些学者研究在零航速条件下的减摇鳍,具有非常良好的发展前景。[4]
4) 舵减摇相对是一种更新的减摇技术。舵减摇无需安装额外的减摇机构和控制系统,仅通过控制舵角来实现减小横摇和艏艉摇的目的。其造价低、占用空间小及使用方便等特点已成为近几年船舶技术人员研究的热点,但舵减摇易造成操舵机械磨损、增加舵机功率等问题尚未得到有效解决,目前较多使用在军用船舶上。
5) 海上高速船,特别是高速双体船的船长相对较短,其横向阻尼较一般船舶更大,上述这些减摇装置对其减摇效果并不明显,而在海上航行时,纵摇相对于横摇影响更加明显,难以克服。[5]因此,在针对高速船减摇时要考虑减纵摇效果较好的截流板形式减摇装置。可控截流板结构简单、维护成本低、体积小及稳定性高等特点,使其成为极具优势的高速船减摇方案。[6]
本文基于截流板机理研究一种新型的减摇装置,该减摇装置艉封截流板的形式,能够通过预测高速船在航行时的运动姿态实现主动截流,为船体提供扶正力矩。目前,针对高速船截流板的研究[2,7-8]主要围绕其减阻方面,而对其减摇性能研究不多,并且主要集中在数值仿真阶段。本装置结构简单、维护方便、占用空间小、响应迅速、所需驱动功率低,并且可同时减少船体横摇和纵摇,特别是可减少纵摇为进一步提升高速船的耐波性能提供新的思路。
2 减摇系统及其控制原理
截流板式减摇系统包括截流板、运动监测单元、伺动机构、控制和显示系统。
钩型截流板安装在艉封板上,并可绕艉封板底部转动,其截流板工作示意见图1。截流板通过改变船底水流的流速和压力分布为船体提供升力,截流板转动的角度不同,其浸深高度也不同。也即能够产生不同的升力。
其实,早在创业之初,正博的定位就已经十分明确,董事长范明龙看中的就是制袋机这块市场空白。晏小斌非常坚定地说道:“至少10年之内我们不计划改行,不会去涉足其他行业。会当凌绝顶,一览众山小。我们就是要专业做好制袋机,做手提袋行业的奢侈品。”
艉部安装截流板改变船体受力情况。船在航行时水流以一定速度流过船底,当截流板伸出船体时,水流在艉部下表面产生旋涡,产生垂直于船体底部的流速分量,靠近截流板附近的流体压力骤然增加,也在此处产生向上的升力[7],即使在船速相对较低的情况下,旋涡依然会产生并提供升力。此外,具有一定浸深高度的截流板还能够调整航态,减少高速行进时的阻力。[8]布置减摇装置的船艉压力分布见图2。截流板若不断升降,就可在航行中为船体提供持续的升力从而产生减纵摇效果。若在船艉的船宽方向上左右布置两组截流板并控制产生不同的升力,也可抑制船体的横摇,见图3。这种布置方式使得该减摇系统尤其适合双体船等船宽相对较长的高速船。

图1 截流板工作示意
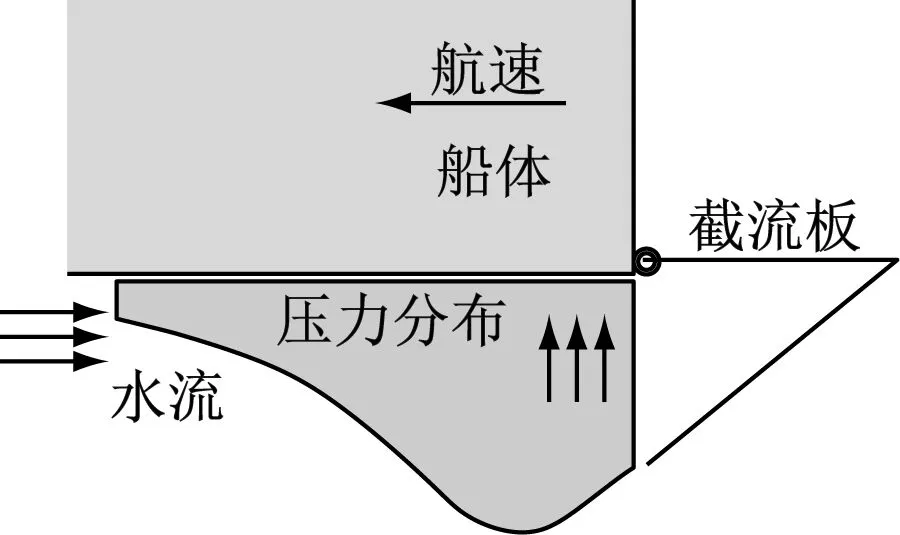
图2 船艉压力分布

图3 减摇系统减横摇示意
本减摇系统完成主动式减摇的重要支撑是增强现实(Augmented Reality, AR)运动极短预报,预报基于船舶的水动力系数、大量的仿真计算和试验。减摇系统中的运动监测单元会测量船体在航行时的运动姿态,当船体产生摇荡时,系统会通过AR运动极短预报分析船体下一刻的横摇纵摇,然后根据预测到的运动情况计算波浪的扰动力,根据船舶的水动力性能计算截流板应该伸出船体的浸深高度,控制系统和伺动机构共同完成截流板的规律性升降,进而较为准确地实现主动截流。减摇系统完成主动减摇的工作流程见图4。
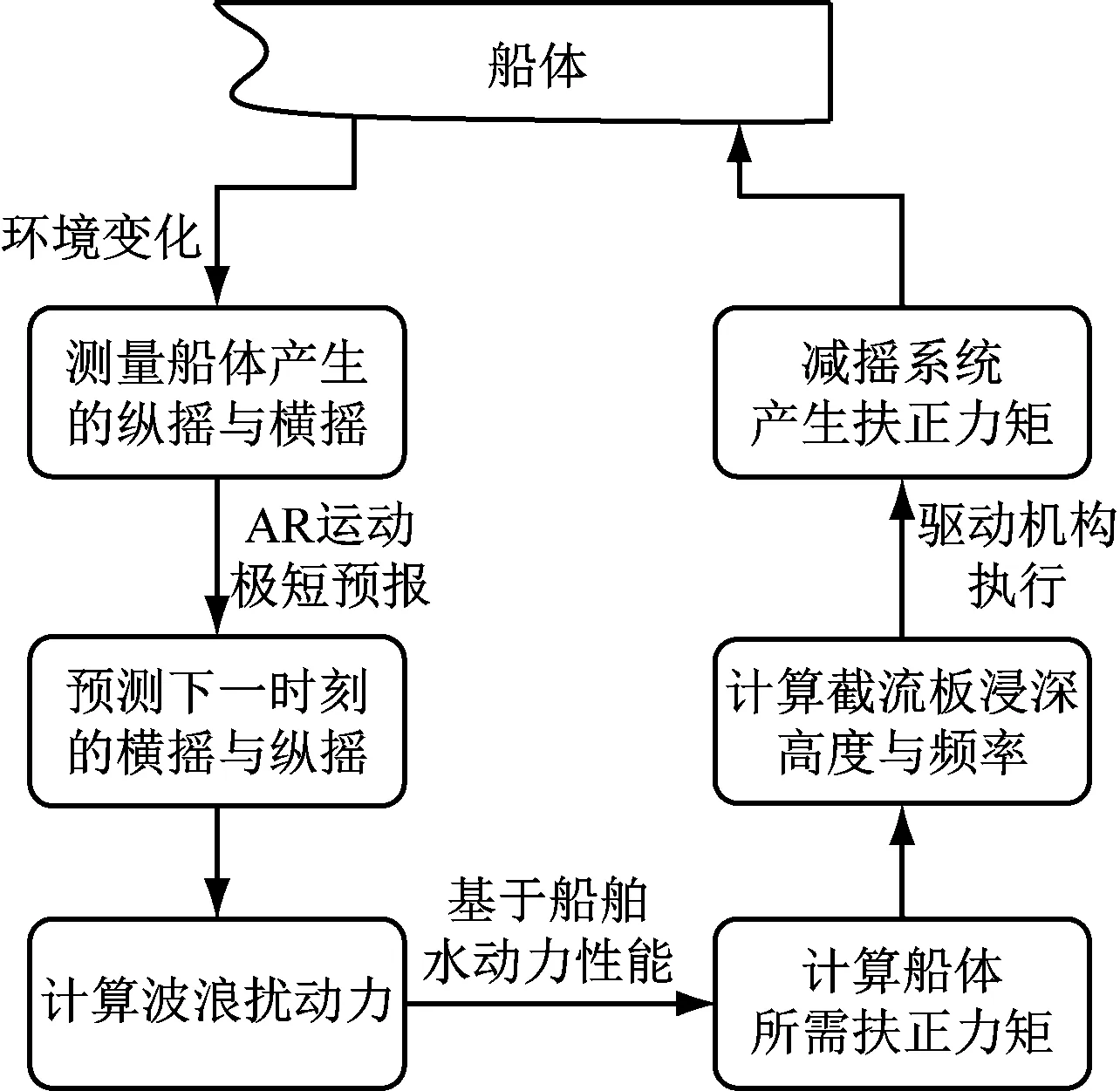
图4 减摇系统工作流程
根据实时测量的运动时历数据,进行未来一段时间内船舶的运动预报。采用自回归模型的递推形式进行直接预报,假设采集的时间序列为{xk},其为前一段时间内有限个数据,自回归模型可表达为
xt=φ1xt-1+φ2xt-2+…+φpxt-pxt+at
(1)

AR极短运动预报值与运动测量值的比较见图5,即下一时间间隔的预报值与测量值对比,由图5可看出预报值与测量值吻合较好。
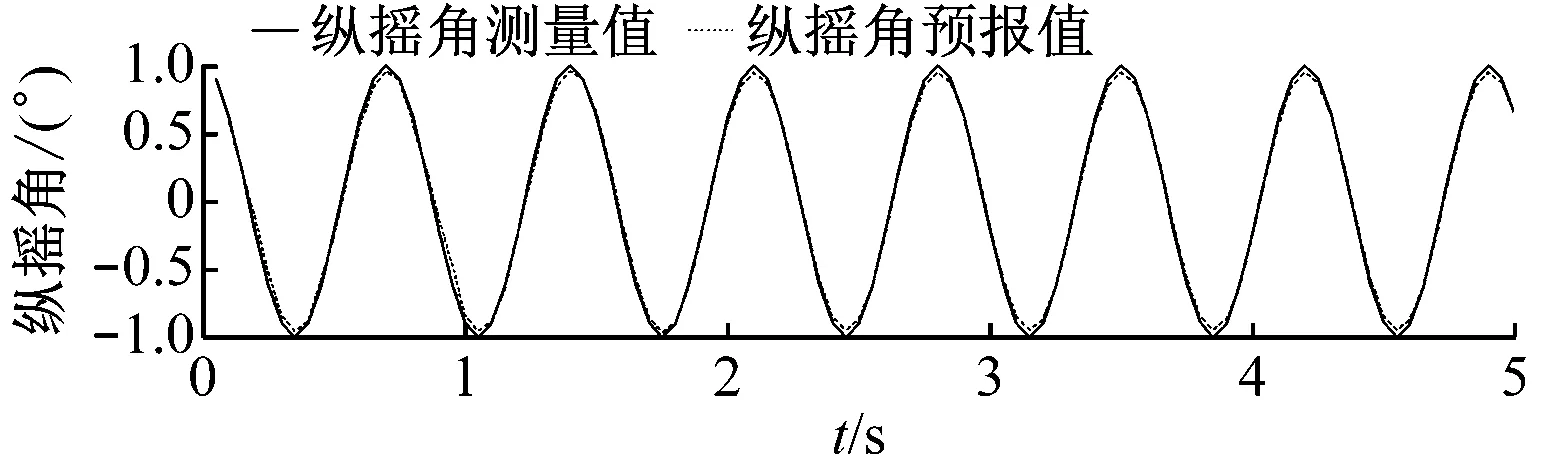
图5 极短运动预报比较
(2)
式(2)中:Ijk为纵摇转动惯量;μjk为波浪频率无穷大处的附加质量;cjk为包含波浪辐射的恢复力系数;Kjk为时间记忆项。
由于反求波浪力矩公式需要知道纵摇角、纵摇角速度、纵摇角加速度,其中角度和角速度采样预报值,角加速度采用当前测量的角速度与下一时刻角速度的预报值进行微分得到。纵摇角、纵摇角速度、纵摇角加速度及反求的波浪力矩见图6。由图6可知:反求的波浪力矩相位与纵摇角加速度接近,但又不完全相等,从反求波浪力矩公式看这是合理的,波浪力矩主要由角加速度贡献的同时,还受角速度和角度的影响;稳定时,可看出符合力、加速度、速度、角位移运动规律。

图6 反求波浪纵摇力矩
综上所述:本减摇系统具有快速、高频的响应能力,可实现对波浪扰动的精准预报,能够适应较高摇荡运动频率下的减摇;减摇系统的控制策略基于对特定船型、特定截流板参数的水动力数值计算,这使得该减摇系统在具有较高适应性的基础上,还具有极强的针对性,对具有特殊线型的高速船仍可保持较好的减摇效果。减摇系统可在不增加控制系统硬件的条件下,沿船宽方向布置多个截流板来适应更宽的船型、变化截流板的布置角度来适应不同艉封形状的船型等。
3 减摇系统试验
为评估本减摇系统的减摇效果,验证控制策略的可行性,进一步探究航速、波浪对减摇装置的影响,对安装截流板的船模进行耐波性试验,包括静水、强迫纵摇、规则波和不规则波减摇试验,重点关注纵摇角即保证纵摇运动的测量精度。
本次模型试验的船型为高速双体船,可更好地测试本减摇系统对横摇和纵摇的综合减摇效果。船模长4.0 m,宽1.3 m,重心高0.4 m。双体船的艉封两侧均安装等宽度的钩型截流板,其最大浸深高度为8 mm,安装后进行重心和惯量校核。试验仪器为R47阻力仪,包含倾角仪、位移传感器和加速度传感器,安装在船体中轴线中心高度,可在试验中测量船体的阻力、纵倾角度等。安装本减摇系统的双体船模型见图7。

图7 安装减摇系统的双体船模型
3.1 强迫纵摇试验
当船模以一定速度航行时,截流板的规律升降会强迫船模产生规则的纵摇运动,为研究截流板的减摇效果,对安装截流板的船模进行强迫纵摇试验。
分别测量同航速下截流板完全收起与周期性升降时的船模纵摇角度。当试验航速为4 m/s,浸深变化幅度为4 mm,周期为0.9 s时,船模纵摇角度的幅值就可达0.7°,此时纵摇角度时历曲线见图8。

图8 航速4 m/s时纵摇角度时历曲线
强迫纵摇试验结果表明:在同一航速下,截流板浸深高度变化幅值的增加会造成船模纵摇幅值的增加。此外,试验还针对不同航速、不同浸深周期进行试验,并测量船模的纵摇角度。试验表明:随着航速、截流板浸深幅度、浸深周期越大,该减摇装置对纵摇的影响越大,也即减摇效果越明显。强迫纵摇试验几个工况下的最大纵摇角度见表1。
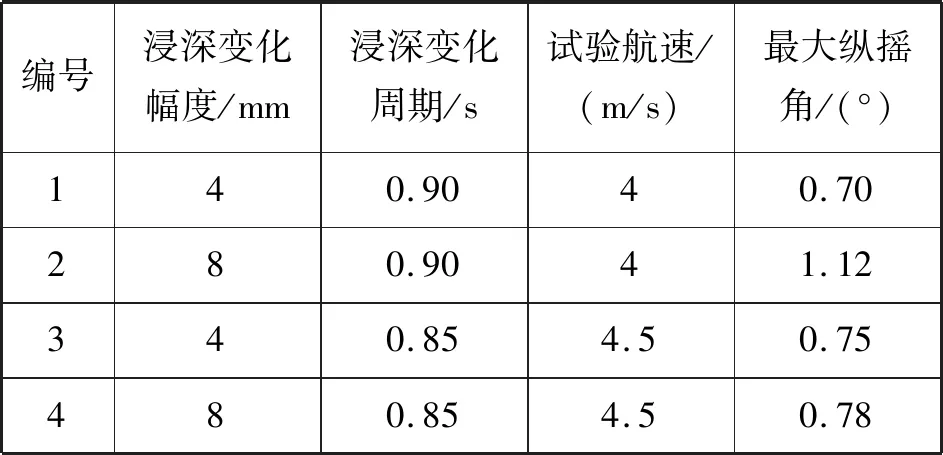
表1 强迫纵摇试验最大纵摇角度
3.2 规则波和不规则波减摇试验
对安装截流板的双体船模型进行迎浪规则波和不规则波减摇试验,比较截流板对纵摇运动的影响,分析航速、截流板浸深和波浪参数对减摇效果的影响。
迎浪规则波减摇试验主要测量在不同波浪、不同航速条件下船模的阻力、纵倾和艉部升沉。试验方案见表2。
对比使用减摇系统前后的无因次纵摇系数比,可看出减摇系统的减摇效果明显,系统开关前后无因次纵摇系数见图9。减摇系统在近似相同波高下,可以实现单位波高减纵摇10%~20%。此外,试验结果还表明:在纵摇固有频率附近,该减摇系统的减摇效果更明显。
迎浪不规则波减摇试验主要测量的参数与规则波减摇试验相同,可观察到随着海况的增加,减摇的效果稍有减弱,但在一定海况下,单位波高纵摇可减小15%~25%。船模航速在4.8 m/s时,减摇系统开关前后的船模纵摇角度对比见图10,可看出当纵摇角度较大时,减摇系统可明显减少船体的纵摇角度。
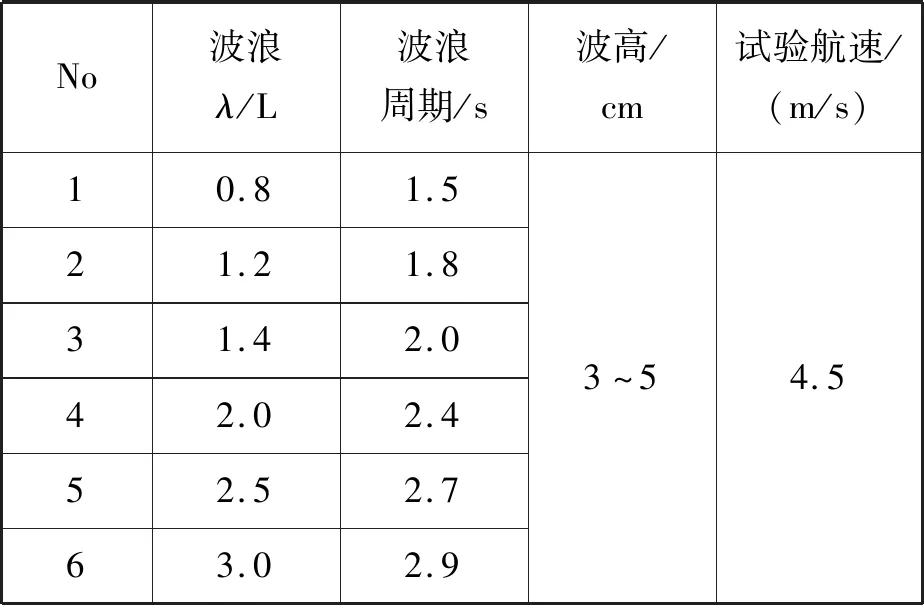
表2 迎浪规则波减摇试验方案

图9 规则波减摇试验中系统开关前后无因次纵摇系数比

图10 不规则波减摇试验中系统开关前后纵摇角度对比
3.3 静水阻力试验
对安装截流板的双体船船模进行静水阻力试验,探究截流板对船舶阻力的影响。静水阻力主要测量在不同试验速度、截流板不同浸深高度条件下船模的阻力、纵倾和艏艉升沉。试验方案及其静水阻力见表3。
试验结果表明:船模安装减摇装置之后可产生一定的减阻效果,静水试验中最多可减少阻力2%~5%。并且,航速的增加和浸深高度的增加都可以进一步增加减摇装置的减摇效率,这与强迫纵摇的试验结果是一致的。船模在试验中的纵倾变化符合截流板产生的压力变化规律。
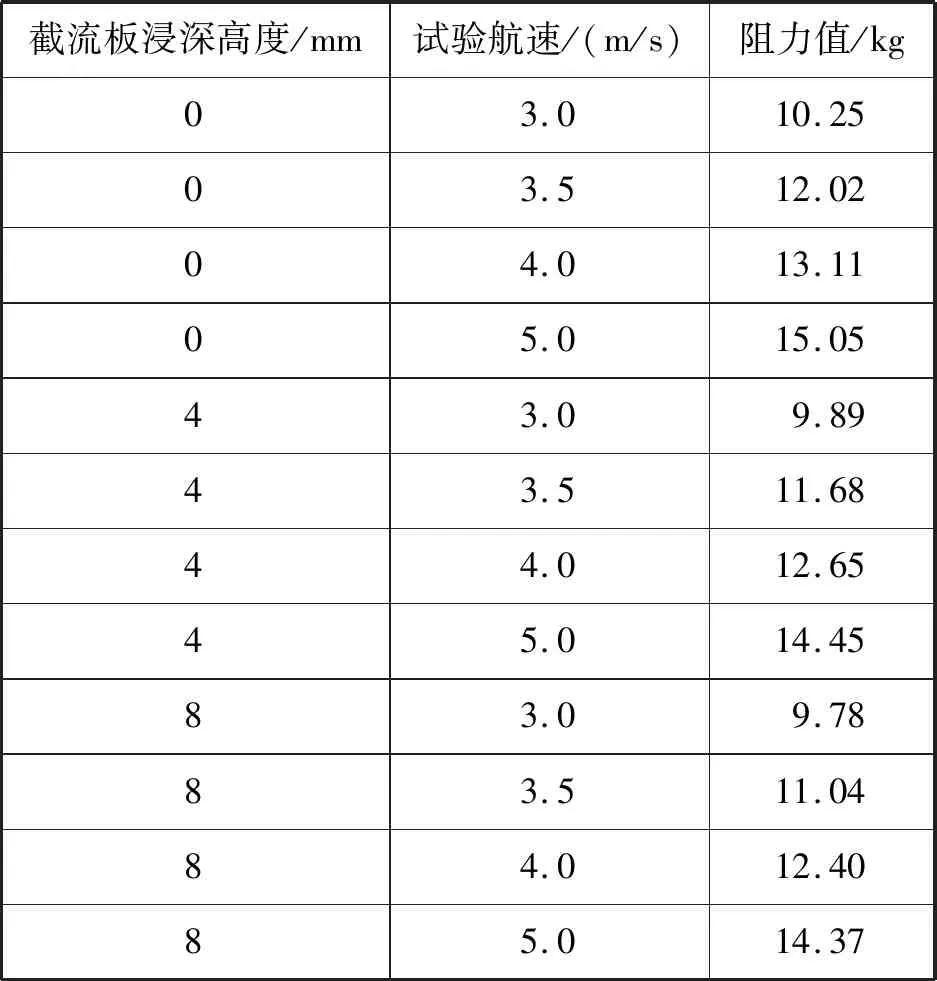
表3 静水阻力试验
4 减摇系统实船试验
对减摇系统的船模试验验证其作为主动减摇系统的控制策略可行性,而为进一步验证本减摇系统的减摇效果需进行严格实船测试。加装本减摇系统的某40 m高速双体船已在我国南海海域进行初次海试。减摇控制系统界面见图11。试验的最高航速达到了35 n mile/h,最大浪高达到3 m,减摇系统的试验进行共获取百余组试验数据点。

图11 减摇系统的控制面板
本减摇系统实船试验结果表明:最大可减少纵摇角度70%,纵摇角速率74%;最大可减少横摇角度57%,横摇角速率72%;此外,还可在一定程度上减少升沉加速度。具体减摇效果见图12。由图12可知:本减摇系统可同时减小船舶的纵摇和横摇运动,特别是能够减小纵摇,并且表现出极强的减摇能力。
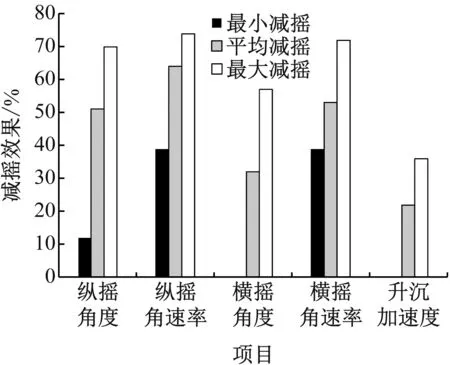
图12 减摇系统实船减摇效果
5 结束语
本文介绍一种适用于高速船的新型减摇系统,减摇装置为艉封截流板的形式,基于水动力数值计算及船舶运动极短预报,精准预测波浪扰动力矩,从而匹配船舶航速、摇荡运动及压力分布,伺服机构实现截流板实时主动运动。经实船验证,实船实施可靠,减摇效果明显。
本减摇系统的减摇装置结构紧凑、附加质量和驱动功率小、安装方便,减摇效果突出,使其尤为适合中小型高速船使用,并且可与其他减摇装置组合使用,提高减摇效率并适应更多的海况和装载工况。该减摇系统对实现高速船的综合减摇提供新的思路,其主动式减摇特点也更加符合未来船舶向精密化、自动化、智能化发展的趋势,具有良好的发展前景。
