采用模糊自适应控制的MMC环流抑制策略
2019-10-28唐志军
唐志军
(国网福建省电力有限公司电力科学研究院, 福建 福州 350007)
0 引言
模块化多电平换流器(modular multilevel converter, MMC)是一种新型的高压柔性直流输电技术[1], 是近年来在中压和高压工业场合中最具有吸引力的拓扑结构之一. 如高压直流输电(high voltage direct current, HVDC)[2-4], 中压变速电机驱动[5-7]和静止同步补偿器[8-10].
相比于传统的两电平电压源换流器, 尽管MMC以其优越的性能, 在太阳能(风能)发电、 光伏并网等方面有着很大的发展前景, 但是其拓扑也有很多不足之处. 其中最主要原因是由于三相桥臂产生的相间环流使桥臂电流发生畸变[11]. 此环流不仅会减少MMC关键元件IGBT、 电容器的使用寿命, 而且还会产生附加损耗. 目前对MMC环流的抑制按照环流抑制控制器的类型分为: 基于比例积分控制的环流抑制控制器[12-13], 基于比例谐振控制的环流抑制控制器[14], 基于重复控制的环流抑制控制器[15]. 文献[14]提出了比例谐振控制器以实现减少环流中的特定次谐波, 便于对内部环流谐波分量进行无差控制, 这将有助于降低环流带来的桥臂电流畸变程度. 但在比例谐振控制器的实现过程中, 会存在诸如不易实现及电网频率偏移情况下不能有效抑制谐波的缺陷. 文献[15]提出了一种重复控制以减少循环电流的偶次谐波分量. 与比例积分控制器相比, 所提出的技术占用更少的存储器用于数据处理, 但无法应用到单相MMC 系统. 文献[13]在MMC内部数学模型的基础上, 采用二倍频负序旋转坐标变换将换流器内部的三相环流分解为2个直流分量, 并设计了基于PI的环流抑制控制器. 这样能够减小相间环流, 但对于MMC-HVDC的研究, 并没有考虑控制器参数的优化问题. 简单的PI参数已经难以满足实际系统在不同情况下的需求.
模糊PI控制是参数自整定调节器, 能够根据系统本身的特性, 实现对参数的在线调整. 即通过模糊控制器在线调节PI控制器中kp、ki的值来实现在线参数自整定, 且模糊PI控制器应用广泛并具有较好的控制效果[16]. 因此, 本研究提出了基于模糊理论的自适应PI控制器, 是用于抑制环流的附加控制器, 将内部环流抑制在较低的水平且不增加桥臂电抗器和电容器, 达到消除MMC桥臂电流的波形畸变, 同时, 在MMC系统参数发生变化的同时在线修正PI以达到自适应控制的目的.
1 三相MMC工作原理
模块化多电平换流器由三个桥臂组成, MMC的数学模型如图1所示, 每个桥臂又分为上、 下两个部分, 分别称为上桥臂和下桥臂, 都是多个子模块级联形成.UDC和IDC分别为直流侧电压和电流, O为直流侧的零点位参考点. 图中左上角为子模块电路结构, T1、 T2为IGBT开关器件, D1、 D2为反并联在IGBT两端的二极管,C为子模块电容器的电容值. 子模块SM主要有三种工作状态: 当T1、 T2都施加关断信号时, 称为闭锁状态, 这种状态为非正常工作状态, 用于在MMC启动时向SM电容器充电或者在故障时可以将子模块电容器旁路; 当T2加关断信号而T1加开通信号时, 称为投入状态, 其 SM电容器总是接入主电路充电或放电, 子模块端电压为电容器的电压USM; 当T1加关断信号而T2加开通信号时, 为切除状态, 此时子模块端电压为零, 子模块被旁路.

图1 MMC基本结构Fig.1 MMC basic structure
2 环流分析
桥臂电流由KCL组成, 可表示为:
(1)

(2)
(3)
(1)~(3)式中,Isum j为换流器内部第j相的相间环流分量;IV j为第j相的交流输出侧电流;Ip j、In j分别是换流器内部第j相的上桥臂电流和下桥臂电流(j=a,b,c).
换流器内部环流分量在桥臂阻抗中产生的压降可由下式表示:

(4)
这里,Usum j为换流器内部第j相中由相间环流产生的不平衡压降.
文献[11]研究得出MMC内部环流的主要成分是直流分量和二次谐波分量, 且二次谐波分量相序为负序的, 交流侧电流的主要成分是基波分量和五次、 其次及以上谐波分量. 如下式所示:

(5)
式中,IDC为直流侧电流;I2 f为环流中二倍频分量的幅值;φ2 f为其初相位角;Q为环流中的3次及以上谐波分量, 数值很小可忽略不计.
为了得到易于控制的直流量, 需采用与负序2次谐波分量相对应的坐标变换. 进一步可达到设计控制器将内部环流中的二次谐波分量消除. 首先, 坐标变换阵如下所示:

(6)
其次, 式(4)的三相表达式经过坐标变换后可得到dq旋转坐标系下的数学模型:

(7)
其中:I2fd、I2fq为环流中二倍频分量的经坐标变换后的直流量;ω为系统交流侧角频率. 最后, 可得环流抑制PI控制框图(详见图2).
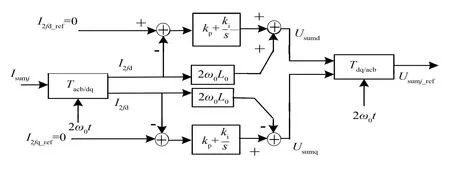
图2 PI控制器Fig.2 PI controller
3 模糊自适应技术实现原理
考虑到控制器参数的优化问题, 设计如图3所示环流抑制模糊PI控制器. 控制结构包括模糊控制器和参数可调的PI控制两部分, 模糊控制器的类型采用二维模糊控制器, 三相控制量Isum j经dq转换后的I2 fd、I2 fq均为直流量, 即可实现期望值为0的环流抑制控制.

图3 模糊自适应控制器结构Fig.3 Fuzzy adaptive controller structure
误差E为给定电流参考值与实际环流量之差, 即环流分量坐标变换后的值(Icird、Icirq),Ec为E的变化量. 模糊控制器的输出Δki、 Δkp为第二部分PI参数的修正量.E较小时输出值Δki较大, 并且综合考虑Ec,E较大时输出值Δkp较大. 由于环流抑制的参考值为0, 为了进一步提高控制器的自适应精度,E和Ec的论域设定以当前的二倍频分量的大小为基准, 并在一段时间后修改一次. 模糊控制器的输入变量E的模糊等级分别为PB、 PM、 PS、 ZR、 NS、 NM、 NB, 分别表示正大、 正中、 正小、 零、 负小、 负中、 负大, PB、 NB的隶属度函数选择为Z-型隶属度函数, 除此之外其余均为三角形隶属度函数. 离散论域应为[ 0.5Isumd, 0.3Isumd, 0.1Isumd, 0, -0.1Isumd, -0.3Isumd, -0.5Isumd], 误差变化率Ec的离散论域应为[0.4E, 0.2E, 0.1E, 0, -0.1E, -0.2E, -0.4E]. 同理可得出输出变量Δki、 Δkp的模糊语言的论域和模糊等级.
针对系统控制目标要求, 本研究根据实际操作经验和实验分析得到Δki的控制规则, 详见表1.

表1 Δki模糊控制规则
首先, 采用Takagi-Sugeno模糊推理机制, 表1模糊结论对应49个模糊结论函数, 第k个模糊结论函数如下所示:

(8)

其次, 模糊PI速度控制器的输出量Δki、 Δkp的曲面图如图4~5所示.
最后, 利用重心法反模糊化得到输出值Δki、 Δkp.

图4 Δki输出曲面图 Fig.4 Δki of output surface map

图5 Δkp输出曲面图Fig.5 Δkp of output surface map
4 仿真分析
为了验证提出的环流抑制策略的有效性, 在PSCAD/EMTDC联合MATLAB仿真环境中搭建了双端201电平的有源网络的MMC- HVDC系统仿真模型. 整流侧采用定直流电压和定无功功率控制, 直流电压指令值为±320 kV, 无功功率指令值为0. 逆变侧采用定有功功率和定无功功率控制, 有功功率指令值为600 MW, 无功功率指令值与整流侧相同. 外环功率调节器和电压调节器均采用PI控制, 内环电流控制器采用前馈解耦控制. 环流抑制控制器采用的是本研究提出的模糊自适应PI控制器. 直流母线电压UDC=320 kV, 每相桥臂的等效电阻R0=1 Ω, 等效电抗L0=50 mH, 模块单元电容器电容值为5 mF.
1) 环流抑制器在0.1 s投入. 仿真结果分析如图6所示. 由图6(a)~(b)可知, 整流侧桥臂环流中含有直流分量、 二次谐波分量, 在没有投入环流抑制器前环流峰值达到了0.83 kA, 在模糊自适应PI环流控制器和PI环流控制启动后, A相桥臂环流分量大小普遍降低, 但本研究所提出的模糊PI控制对环流分量有更好的抑制效果, 消除了桥臂环流波形中的二倍频分量, 可将环流减少到可以忽略不计的程度. 同时, 设计的控制器在逆变侧环流抑制效果如图6(c)所示, 对环流分量也有较好的抑制效果. 因此, 所设计的模糊自适应PI控制器超调量更小、 响应速度更快, 模糊PI控制器较PI控制在控制精度方面和鲁棒性方面表现更加优越. 且该方法可以简化PI参数的调节, 实现动态调节. 另外, 应用了模糊自适应PI控制器, 由图6(d)可知还可消除A相上桥臂电流畸变, 由图6(e)可得各子模块电容器电压波动明显减小, 验证了该设计的环流抑制控制器的有效性.
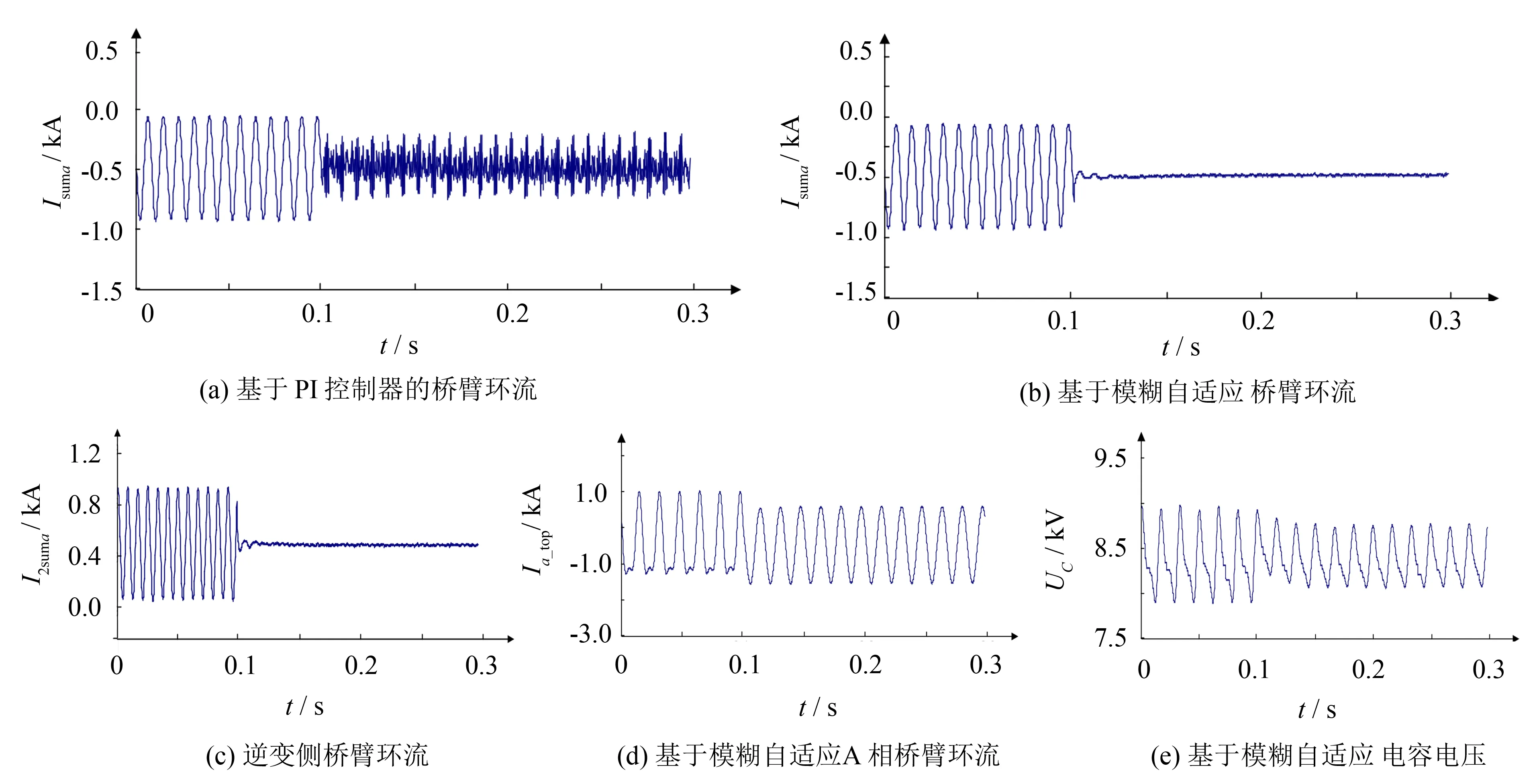
图6 环流抑制仿真Fig.6 Circulation suppression simulation
2) 系统在0 s时交流侧发生单相接地故障持续时间0.02 s, 仿真结果如图7所示.

图7 非对称故障下MMC桥臂共模电流Fig.7 MMC bridge arm common mode current on the AC side under the asymmetric fault
整流侧的桥臂环流分量的FFT如图7所示, 图7(a)为不采用模糊PI环流抑制控制器的环流分量 (fast fourier transformation, FFT)分析结果, 图7(b)则是采用本研究所提出控制器的环流分量FFT分析结果. 由文献[17]可知, 在交流电网不对称的情况下, 桥臂共模电流会出现直流电流、 直流环流、 交流基频环流和交流2倍频环流等多个频率分量. 由图7(a)~(b)可知, 当加设本研究所提出的模糊PI环流抑制控制器时, 所产生的各个倍频分量的幅值都有所减小, 其中基频分量最明显. 因此, 在交流侧发生不对称故障时, 本研究所设计的控制器将有助于减小桥臂环流的波动大小.
5 结语
针对基于模块化多电平换流器的柔性直流输电的环流抑制控制方法进行研究, 提出基于作用模糊子集的模糊PI环流抑制控制器. 通过仿真分析, 表明本研究所设计的模糊自适应PI控制器相比于传统控制器具有较好的控制效果, 提高了环流抑制控制器的快速性和鲁棒性, 同时兼顾PI控制和自适应控制的优点, 可以实现在线调节PI参数, 提高系统的稳定性.