自动驾驶汽车横向运动控制方法综述
2019-10-28高琳琳唐风敏
高琳琳 , 戎 辉 , 唐风敏 , 郭 篷 ,何 佳
(1.天津大学,天津 300072;2.中汽研 (天津)汽车工程研究院有限公司,天津 300300;3.中国汽车技术研究中心有限公司,天津 300300)
自动驾驶汽车是一种集感知、决策、控制于一体的智能化系统,其被视为交通安全事故、交通拥堵等问题的最终解决方案,自诞生以来一直备受各国政府、高等院校以及相关机构重视[1]。作为自动驾驶汽车三大核心技术之一,运动控制系统的主要工作是根据环境感知系统以及规划决策系统提供的信息,控制车辆沿规划好的路径行驶。自动驾驶运动控制系统可以进一步划分为纵向运动控制与横向运动控制两部分。
横向运动控制主要针对车辆的转向执行系统进行控制,操纵车辆转向的同时,保证自动驾驶汽车沿规划好的路径行驶。具体地,横向运动控制系统根据目标路径信息以及自身位姿信息计算方向盘转角或车轮转角信息,并将计算所得信息传递至执行机构执行。作为自动驾驶汽车的底层控制系统,横向运动控制系统及其控制方法的优劣不仅会影响对规划路径的跟踪精度,还会对车辆的稳定性、舒适性产生影响。因而,针对自动驾驶汽车的横向运动控制进行深入研究,研究具有良好实时性、鲁棒性以及稳定性的横向运动控制方法一直是自动驾驶技术领域的重点与热点。
本文主要针对近年来自动驾驶横向运动控制的国内外研究情况进行介绍,同时分析了该项技术的未来发展趋势,为自动驾驶技术的进一步发展奠定理论基础,并提供一定的技术思路。
1 横向运动控制车辆模型
除一些智能控制方法外,许多经典控制、现代控制理论依赖被控对象的系统模型完成控制器设计或控制参数整定,因而,建立自动驾驶汽车的模型往往是控制系统设计的第一步。现有横向运动控制的研究中,采用的车辆模型主要为运动学模型与动力学模型两种,两种模型的示意图见图1。
1.1 车辆运动学模型
如图1所示,在大地坐标系XOY下,设定自动驾驶汽车后轴中心坐标为 (Xr,Yr),后轴中心点速度为Vr,车辆的航向角为φ,前轮等效转角为δf。由此,可以得到如下车辆运动学模型:
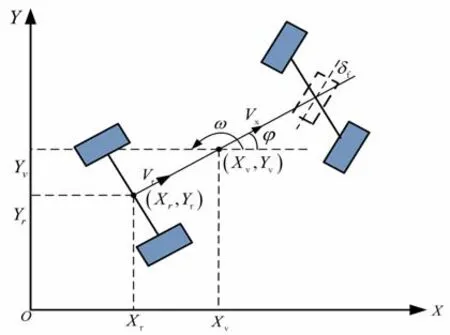
图1 车辆模型
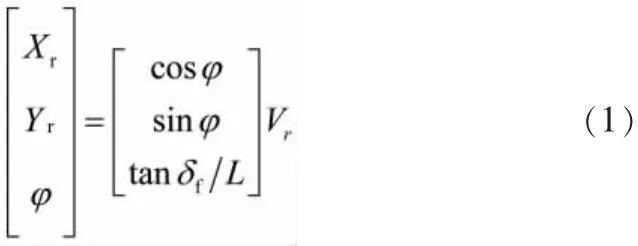
式中:L——车辆前后轴的轴距。
由于车辆运动学模型建立在车辆与道路间的几何关系基础上,未针对车辆行驶过程中的受力加以考虑,因此该模型适用于AGV、轮式机器人、低速无人车等特殊自动驾驶场合。
1.2 车辆动力学模型
在一些高速行驶场合,为保证对目标路径跟踪的精确度,需采用车辆动力学模型替代运动学模型进行控制器设计。如图1所示,假设轮胎存在线性侧偏特性,对前、后轴两个车轮进行等效后,可以得到如下车辆动力学模型:

式中:Yv——车辆质心在大地坐标系XOY下横向位置;φ、δf——与前文相同,分别代表车辆航向角与前轮等效转角;ω——车辆的横摆角速度;m——车辆的质量;Vx——车辆质心处的车速;Cf、Cr——车辆前、后轴的侧偏刚度;lf、lr——车辆前、后轴的轴距;Iz——车辆绕垂直方向的转动惯量。
2 横向运动控制策略
现有自动驾驶横向运动控制策略,可按照采用传感器类型的不同,将其划分为非预瞄式和预瞄式两种。非预瞄式横向运动控制策略主要适用于某些车路协同式自动驾驶车辆,如磁引导式或线圈引导式无人车。这类自动驾驶车辆通过车身上的传感器识别埋在道路中的磁钉或线圈,以此获取车辆自身与期望路径间的位置关系,进而实现自动驾驶。
与非预瞄式横向运动控制策略不同,预瞄式横向运动控制策略主要模仿人类驾驶车辆的行为特性,以目标路径上车辆行驶方向前方的某一点作为跟踪目标,完成对规划路径的跟踪行驶。预瞄式控制策略适用于一些以视觉感知系统获取路径信息的自治式无人车,该种策略符合人类的驾驶习惯,且能在高速行驶工况下取得较好的控制精度,因而自动驾驶技术领域有着广泛的应用。
针对预瞄式横向运动控制策略中预瞄点个数、距离以及选取方式的研究,也一直是该领域的研究难点。赵凯等[2]提出了一种多点序列预瞄的控制策略,该策略以规划路径上的一系列GPS坐标点作为自动驾驶车辆的跟踪目标,利用车辆运动学模型计算车辆位置信息,并根据目标坐标点与车辆当前时刻位置的偏差设计控制器,完成对车辆的转向控制,实现对目标路径的跟踪。
刁勤晴等[3]针对自动驾驶汽车在大曲率转向工况下路径跟踪精度低、且易出现提前转向的问题进行了深入研究,提出一种双点预瞄式横向模糊控制方法。他们在车辆动力学模型的基础上,采用双点预瞄策略设计了一个模糊控制器实现对自动驾驶车辆的横向运动控制,保证车辆在大曲率路径下的跟踪精度。
蔡英凤[4]等人同样针对无人车在大曲率路径上的横向运动问题进行了研究,并利用可拓学思想设计了自动驾驶汽车横向可拓预瞄切换控制系统。他们设计的横向控制系统包括了上层控制器和下层控制器两个部分。其中,上层控制器为经典域且采用反馈控制思路,下层控制器为可拓域且采用前馈-反馈控制策略。
R Liu[5]对现有自动驾驶横向运动控制过程中预瞄点的确定方式进行了介绍,并提出了一种改进的预瞄点确定方法。该方法在一般的预瞄点圆形确定法基础上,提出一种虚拟圆的概念,以此保证在道路-车辆距离偏差较大时,能够更快地确定预瞄点,进而迅速消除路径跟踪误差,减少系统超调。
此外,Kazama K[6]、Yuan Liao[7]等人也都针对自动驾驶横向运动控制的预瞄控制策略进行了各自的研究。
3 横向运动控制方法
横向运动控制一直是自动驾驶运动控制中的重点以及核心内容,也是能否实现对规划路径快速、准确跟踪的关键。随着自动驾驶技术与自动控制技术的不断进步,横向运动控制的研究也不断深入,新方法不断涌现。
3.1 基于道路几何原理的横向运动控制方法
基于道路几何原理的横向控制方法是根据当前车辆位置与目标点的偏差,利用三角函数等几何原理计算前轮转角(或方向盘转角),实现对目标路径的跟踪。此类方法的代表有纯跟踪算法、斯坦利算法、环形预瞄法等。
北京工业大学智能车BJUT-IV[8]即采用了纯跟踪算法完成对横向运动控制器的设计。该团队将预瞄距离设计成车辆参数和车速的函数,并根据预瞄距离确定预瞄点,利用预瞄点与当前车辆位置的偏差计算前轮转角。此外,Morales J[9]、Li X[10]等人也都分别对纯跟踪算法进行了一定研究。
斯坦利算法[11]是斯坦福大学智能车Stanley上应用的一种路径跟踪控制算法。与纯跟踪算法采用单一偏差不同,斯坦利算法分别利用距离偏差和航向偏差计算前轮转角,最后对计算结果进行了叠加。靳欣宇等[12]以斯坦利算法为基础设计了自动驾驶横向运动控制器,同时提出了一种自适应预瞄时间改进方法。该方法根据车速、当前航向角、路径曲率等信息确定预瞄时间,并在预瞄时间内预测行驶状态,以此计算车辆前轮转角。
环形预瞄法是一种与人类驾驶习惯相似的路径跟踪算法。北京工业大学的姚俊琴将一般的环形预瞄方法和前馈控制方法结合在一起,提出了一种可进行速度调整的改进环形预瞄算法。该改进算法不仅能够实现对期望路径的准确跟踪,还能够在必要时对车速进行调整[13]。
3.2 基于经典控制理论的横向运动控制方法
PID控制作为应用最为广泛的经典控制方法,同样在自动驾驶横向控制领域有着广泛应用。Netto[14]提出了一种基于最优路径检测数据的状态反馈PID控制策略,该方法对于大曲率路径跟踪问题具有较好的鲁棒性。
Auday Al-Mayyahi[15]设计了一种分数阶PID控制器来进行车辆的路径跟踪,并采用粒子群优化算法整定PID控制参数,其设计的控制器能够取得较好的跟踪精度,但粒子群算法实时优化的大计算量导致系统实时性较差。
赵盼[16]在车辆动力学模型的基础上设计了一种PID与小脑模型神经网络的复合横向控制器,该控制器利用小脑模型神经网络的自学习能力进行动力学模型的非线性补偿,提高路径跟踪精度。
何俊龙等[17]针对多传感器缩微智能车的路径跟踪问题进行研究,基于所搭建的缩微道路交通实验台,设计了一种能够实时调整缩微智能车当前时刻位置与规划路径间偏差的增量式PID路径跟踪算法。与一般PID路径跟踪算法相比,增量式PID算法具有响应速度加快,超调量减小等优势。
3.3 基于现代/智能控制理论的横向运动控制方法
现代控制理论是一种建立在状态空间法基础上的自动控制理论,智能控制理论则不依赖被控对象的数学模型。许多现代控制方法以及智能控制方法都在自动驾驶横向运动控制方面有着一定范围的应用。
武星等[18]针对自动导引车的横向运动控制问题设计了一种基于运动预测的线性二次型最优控制器。所设计的最优控制器以车速作为约束条件,对自动导引车的运动进行预测并在此基础上寻优,使控制器能够快速、平稳地消除车辆与规划路径之间的偏差。黄海洋等[19]同样利用最优控制理论,在车辆动力学模型的基础上,结合多点预瞄策略,以预瞄窗口内多个预瞄点的跟踪误差为优化目标,提出了一种基于多点预瞄的路径跟踪最优控制方法,并在实车条件下进行了方法验证,证明了提出方法的有效性和实时性。
张亮修等人[20]在建立了三自由度车辆非线性动力学模型的基础上,研究了一种线性时变模型预测路径跟踪控制方法,并引入向量松弛因子解决优化求解过程中硬约束导致的控制算法非可行解的问题。龚建伟等人针对无人驾驶汽车的横向运动控制问题进行了大量研究,总结了基于运动学模型及动力学模型的模型预测横向运动控制,同时也对横向运动控制约束问题进行了大量分析研究。
除上述控制方法外,不少研究人员也尝试利用其他现代控制方法或智能控制方法,如反演控制、滑模控制、模糊控制等,解决自动驾驶汽车横向运动控制问题。
4 自动驾驶横向运动控制发展趋势
目前,对于自动驾驶横向运动控制方面的研究,不论在控制策略还是控制方法上,都取得了不少研究成果。这些研究成果中,也有许多完成了实车道路试验与测试。然而,对自动驾驶汽车这一多自由度、多性能指标耦合的复杂被控对象而言,横向运动控制方法仍然存在许多有待解决的问题。此外,车联网等一些新技术的出现,也为横向运动控制问题的研究带来了新的挑战。下面就横向运动控制的发展趋势提出初步展望。
4.1 自动驾驶汽车的横、纵向运动控制耦合
现有横向运动控制的大多数研究成果中,仅针对车辆的横向运动学或动力学加以考虑,进而对横向运动控制系统进行单独设计。然而,对于汽车而言,其横、纵向的运动学及动力学特性是相互影响、不可分割的,针对横向运动控制问题进行研究的过程中考虑车辆纵向运动对其产生的影响,进而完成自动驾驶汽车横、纵向运动控制的协调或集成,是车辆运动控制领域的发展趋势之一。
4.2 车辆底盘动力学控制与自动驾驶运动控制结合
通过前文的论述不难看出,现有自动驾驶横向运动控制的研究主要集中于如何提高路径跟踪精度而忽略了车辆稳定性、舒适性和经济性的问题。另一方面,许多车辆动力学控制系统 (如ESP、TCS等)已相当成熟且已成为汽车的标准配置,而对于混合动力汽车、分布式电驱动汽车等新能源汽车,其能量管理与控制策略同样不可或缺。由此,如何结合现有成熟的车辆底盘动力学控制系统、能量管理系统与自动驾驶运动控制系统,使其既不相互影响,又可充分发挥其各自优势,是车辆运动控制领域的另一发展趋势。
4.3 车联网环境下的自动驾驶横向运动控制
近年来,针对车联网技术的研究正在飞速发展。网联式无人车成为了继自治式无人车后自动驾驶汽车的另一种主要发展形式。与自治式自动驾驶汽车不同,车联网形式下的自动驾驶汽车主要依靠车-车、车-路、车-行人等方式获取道路环境信息,进而完成无人车的规划、决策和控制。车联网形式下的信息获取方式更加多样、灵活,这也为自动驾驶横向运动控制在策略和方法的设计与选择上提供了更多可能,因此,研究车联网环境下的横向运动控制形式、策略和方法,是车辆运动控制领域的又一发展趋势。
5 结论
自动驾驶汽车正在逐渐走进大众的视野,为人们的生活带来飞速的变化。作为自动驾驶汽车的重要核心技术,横向运动控制是决定自动驾驶汽车整车性能的关键。为此,本文从车辆模型、控制策略和控制方法角度分析总结了横向运动控制的国内外研究现状,指出现有研究中存在的一些不足,并展望了未来的发展方向,即:横、纵向耦合控制、结合现有成熟的底盘控制技术以及车联网环境下横向运动控制技术应用。