机器人肝门部胆管癌手术34例系列报告
2019-10-25常正尧赵国栋丑赛刘荣
常正尧,赵国栋,丑赛,刘荣,
(1.解放军医学院,北京 100853;2.解放军总医院第一医学中心肝胆外二科,北京 100853)
肝门部胆管癌是一种少见的消化系统恶性肿瘤,预后差,5年总生存率为0~16%[1-4]。尽管新辅助治疗有望提高肝门部胆管癌的总体预后[5],手术切除仍然是肝门部胆管癌最有效的治疗手段。由于其特殊的肿瘤生物学特征,复杂的局部解剖结构,手术难度大、风险高,其术后并发症的发生率也居高不下。随着手术技术及医疗器械的不断革新,微创手术逐渐成为腹部外科的主流术式。而传统腹腔镜操作不灵活、器械活动度差、支点效应、反人体工学等固有缺陷,限制了其在肝门部胆管癌手术中的应用[6]。达芬奇机器人手术系统具有灵活性高、稳定性好、视野清晰、精确度高等优点,近年来在多个学科领域的应用不断增加,然而机器人手术在肝胆领域仍属于早期探索阶段,相关研究较少。笔者团队在积累了大量的肝胰机器人手术经验后开始尝试机器人肝门部胆管癌手术,现总结我中心2016-2017年机器人肝门部胆管癌手术的早期经验,通过手术情况和近期疗效评估手术的安全性和可行性。
资料与方法
一、一般资料
本研究收集2016年1月至2017年12月解放军总医院第一医学中心刘荣手术团队完成的34例达芬奇机器人肝门部胆管癌手术病人的临床资料,其中男性25例,女性9例,年龄(65.06±7.16)岁(50~79岁),体质量指数(BMI)为(23.47±3.62) kg/m2,术前总胆红素(134.50±104.07) μmol/L,白蛋白(36.14±4.70) g/L,丙氨酸转氨酶(ALT)(88.94±66.23) U/L,有18例病人术前行胆管穿刺引流减黄。Bismuth分型:Ⅰ型13例,Ⅲa型3例,Ⅲb型9例,Ⅳ型9例。术前Child-Pugh肝功能评估:A级11例,B级23例。术前合并疾病方面方面:合并高血压12例、糖尿病4例、冠心病病史1例、脑梗死病史1例。美国麻醉医师协会(ASA)麻醉风险评分:Ⅱ级30例,Ⅲ级4例。所有病人术前通过CT动静脉血管造影(CTA/CTV)、MRI、磁共振胰胆管成像(MRCP)和(或)正电子发射断层显像/计算机断层显像(PET/CT)等影像学检查评估肿瘤位置、大小、与周围组织关系等,决定手术方式,并且签订术前知情同意书。术前检查怀疑为血管受侵、远处转移及拒绝行机器人手术的病人排除在外。
二、手术方法
病人取分腿仰卧位,头高脚低。参考机器人胰十二指肠切除术的布孔方法:镜头孔选取肚脐右下方(12 mm Trocar);1臂位于左侧锁骨中线脐水平 (8 mm Trocar);3臂位于右侧肋缘下腋前线外侧(8 mm Trocar);2臂位于3臂和镜头孔连线中点,术中使用Trocar in Trocar技术;助手孔位于肚脐左下方(12 mm Trocar)[7](图1)。

注:A.助手孔;C.镜头孔;R1.一号机械臂孔;R2.二号机械臂孔;R3.三号机械臂孔图1 参考机器人胰十二指肠进行肝门部胆管癌手术布孔(资料来源于文献[7])
具体步骤:入腹后探查排除远处转移,并探查肝门部,显露胆总管腹侧部分,初步判断肿瘤范围及肝门区淋巴结转移情况,结合术前影像学检查制定手术方案。解剖并骨骼化肝十二指肠韧带,并清扫周围淋巴结,显露肝固有动脉、肝总动脉、左右肝动脉及门静脉,明确是否侵犯左右肝动脉及门静脉。逆行切除胆囊,游离出远端胆管至胰腺段后离断,下端切缘行冷冻病理学检查,逆行游离胆管直至于肿瘤上方正常胆管位置离断保留侧胆管,切缘送冷冻病理学检查。若肿瘤为Ⅲa型,侵犯右肝管,则一期联合右半肝切除术(图2);若为Ⅲb型,侵犯左肝管,则联合左半肝切除术(图3),左右半肝切除时常规联合尾状叶切除,如右侧尾状突或Spiegel叶,部分病例联合全尾状叶切除。标本及淋巴结整块切除后放入一次性取物袋,置于助手孔旁待取出,使用5-0可吸收线行肝门部胆管成型。超声刀继续打开胃结肠韧带,结肠中血管左侧无血管区打开结肠系膜(L孔)[8],上提空肠,切割闭合器离断空肠,超声刀离断空肠系膜直至根部,使用直线切割闭合器行肠肠侧侧吻合,上提空肠袢,行结肠后胆肠吻合术。术毕于胆肠吻合口后方放置粗乳胶引流管1根,自R3臂Trocar处引出体外。常规清扫第5、8、9、12和13组淋巴结,选择性联合第16a2组淋巴结清扫。
三、观察指标及随访
统计病人手术时间、术中出血量、输血率、术后拔除胃管时间、术后住院时间、手术切缘情况、术后相关并发症发生率等围手术期指标。通过定期门诊复查及电话完成随访,记录病人的生存状况、死亡时间、术后肿瘤复发及转移情况、辅助放化疗情况等,随访截止时间为2018年12月31日。
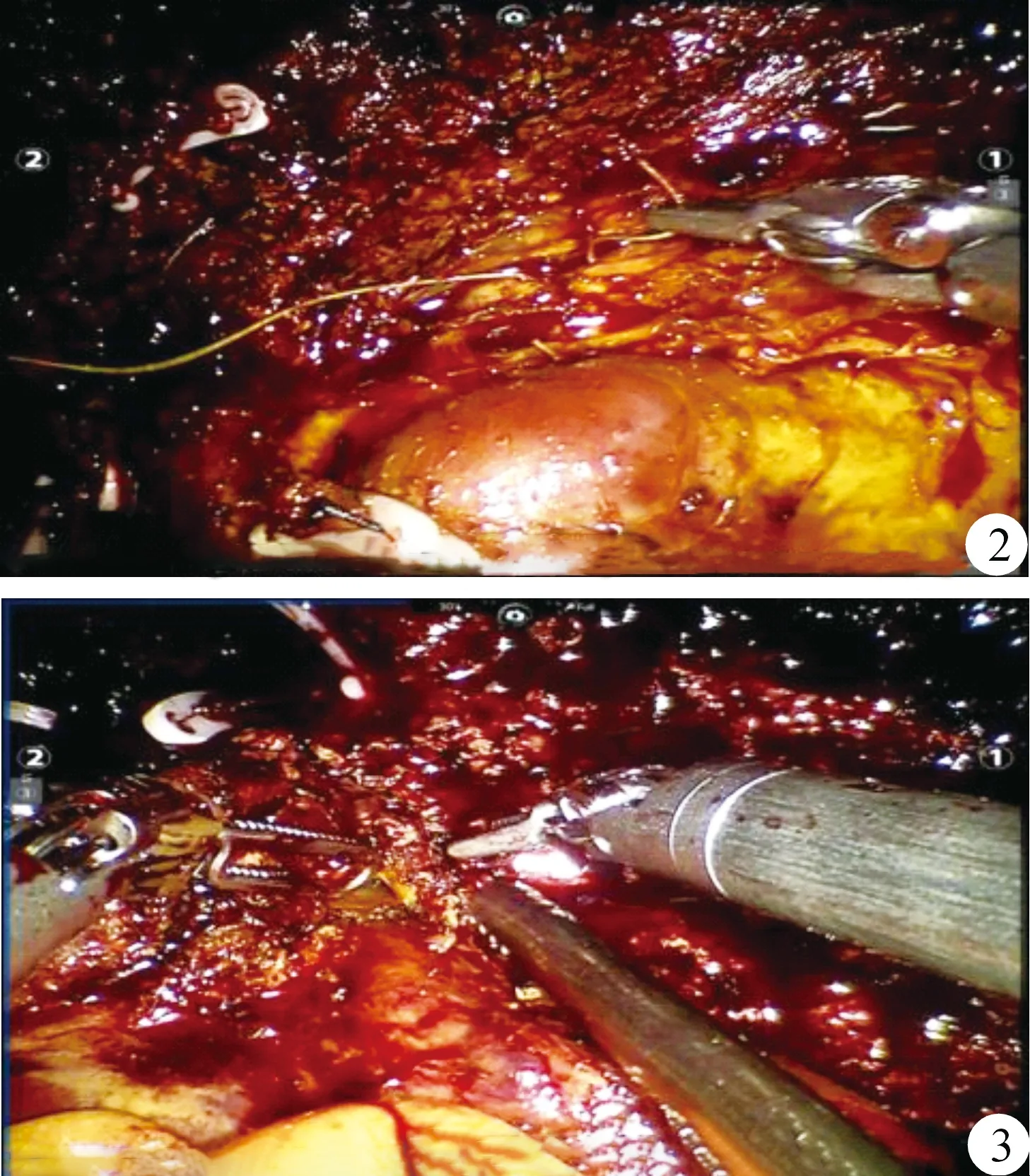
图2 机器人肝外胆管联合右半肝切除术后左侧肝管开口,待成型和吻合 图3 机器人肝外胆管联合左半肝切除术后右侧肝管开口,待吻合
四、统计学方法

结 果
34例病人手术方式:①Bismuth Ⅰ型13例,均行肝外胆管切除+胆肠Roux-en-Y吻合;②Bismuth Ⅲa型3例,2例行右半肝切除+胆肠Roux-en-Y吻合,1例行右半肝联合尾状叶切除+胆肠Roux-en-Y吻合;③Bismuth Ⅲb型9例,4例行左半肝切除+胆肠Roux-en-Y吻合,4例行左半肝联合尾状叶切除+胆肠Roux-en-Y吻合,1例因肝左动脉侵犯无法分离,行肝外胆管切除+胆管成型+胆肠Roux-en-Y吻合;④Bismuth Ⅳ型9,2例行左半肝切除术+胆肠Roux-en-Y吻合,1例行左半肝
联合尾状叶切除+胆肠Roux-en-Y吻合,6例行肝外胆管切除+胆管成型+胆肠Roux-en-Y吻合。所有病例常规行肝十二指肠韧带淋巴结骨骼化清扫,具体手术方式及围手术期情况见表1。
34例病人总体手术时间为(329.47±93.55) min,范围为160~500 min;术中出血量50~2 000 ml(中位数为125 ml);输血率为11.76%(4/34);术后住院时间4~53 d(中位数为9.5 d);术后恢复经口进食时间中位数为3.5 d。根据术后病理结果,显微镜下切缘组织无癌细胞残留为根治性切除(R0),显微镜下切缘组织可见癌细胞残留及肉眼可见癌组织为姑息性切除(R1、R2),本组总体R0切除率为61.76%(21/34),具体临床分型及切除方式见表2。

表2 34例肝门胆管癌临床分型与切除方式(例)
根据Clavien-Dindo并发症分级[9],术后4例(11.76%)出现Ⅲ级以上严重并发症,包括腹腔出血、胆漏、肝脓肿和腹腔积液各1例,行介入或保守治疗后痊愈。全组无中转开腹、无围手术期死亡病人,也无非预期二次手术。术后病理提示均为胆管腺癌,肿瘤长径0.7~6 cm,淋巴结检出数5~16枚/例,中位数为8枚/例。按照美国癌症联合委员会(AJCC)《胆管癌分期标准(第8版)》分期Ⅰ期2例,Ⅱ期19例,ⅢA期5例,ⅢB期8例。病理TNM分期T分期中T1期2例,T2a期16例,T2b期9例,T3期7例,其中8例伴有肝门区淋巴结转移。随访截止日期为2018年12月31日,共有33例(97.05%)得到了完整随访,1例失访,随访时间为3~36个月,中位随访时间为16个月。截至随访日期10例病人死亡,死亡原因:突发脑梗死1例,肿瘤复发或转移9例,其中4例为根治性切除(R0)病人,5例为姑息性切除(R1、R2)病人。另外23例(不含失访1例)存活病人中,17例根治性切除(R0)病人未见明确复发转移迹象,6例姑息性切除(R1、R2)病人出现局部转移,其中4例接受放化疗等辅助治疗。最长无瘤生存期为36个月。

表1 34例肝门部胆管癌手术方式及围手术期情况[均值(范围)]
注:A.肝外胆管切除+胆肠Roux-en-Y吻合;B.右半肝切除+胆肠Roux-en-Y吻合;C.右半肝联合尾状叶切除+胆肠Roux-en-Y吻合;D.左半肝切除+胆肠Roux-en-Y吻合;E.左半肝联合尾状叶切除+胆肠Roux-en-Y吻合;F.肝外胆管切除+胆管成型+胆肠Roux-en-Y吻合
讨 论
肝门部胆管癌恶性程度高,只有25%的病人在诊断时可行手术切除,并且有研究发现术后5年生存率仅为10%~43%[10],病人远期预后主要依赖彻底的淋巴结清扫与根治性肿瘤切除,因此手术切除仍被认为是肝门部胆管癌唯一的根治性方法[11]。由于其解剖位置的特殊性(肝门部位置深,解剖结构变异性高,汇集肝动脉、门静脉、胆管等重要结构)和早期易向邻近组织浸润的生物学特点,使得手术切除难度高、风险大。
近代微创外科技术的不断发展和医疗器械的不断革新,使胆道外科手术技术发生了重大的变化。达芬奇机器人手术系统的出现在理论上开拓了微创下肝门部胆管癌手术的领域,与传统的腹腔镜手术不同,达芬奇机器人手术系统手术器械的动作拥有7个自由度、有消除生理抖动、3D高分辨率清晰视野等优点,允许术者能够以一种高度精确的方式进行手术。达芬奇机器人手术系统很好地克服了传统腹腔镜手术在淋巴结清扫、肝门部胆管切除重建上的不足。目前关于微创肝门部胆管癌手术的相关报道仍较少,见表3。
本研究完成的34例机器人肝门部胆管癌手术,手术时间为(329.47±93.55) min,术中出血量为50~2 000 ml(中位数为125 ml),与前期国际报道的数据相近。Xu等[21]报道的10例机器人肝门部胆管癌切除术与32例开腹手术对比研究,机器人手术时间长[(703±62) min比(475±121) min,P<0.001],术后并发症发生率高(90%比50%,P=0.031)。本研究中手术时间与前期文献报道中腹腔镜及开腹手术时间基本接近,可见机器人肝门部胆管癌切除术在手术时间和术中出血量的控制上是有潜力的,笔者认为在有丰富机器人手术经验的团队配合下,机器人手术时间是可以有效缩短的。
本组病人的Clavien-Dindo Ⅲ级以上术后严重并发症发生率为11.76%(4/34),包括腹腔出血、胆漏、肝脓肿和腹腔积液各1例,行介入或保守治疗后痊愈。其并发症的发生率与文献报道[22-23]的开腹手术并发症发生率相近。另外,术中淋巴结清扫以及根治性(R0)切除率与国内外开腹手术的大宗病例的文献报道[24-25]相比,亦无明显差异。当然,其各项手术学指标与开腹及腹腔镜手术之间的对比情况仍需进一步开展随机对照研究来证实。
为了达到根治性手术的要求,肝门部胆管癌常需联合肝脏切除,根据国际著名医疗中心的报道[26-28],肝门部胆管癌联合肝叶切除病例可占全部病例的60%以上,其根治性切除率提高到50%~80%。本研究中共有21例Ⅲ型、Ⅳ型病人,联合肝切除占手术切除的66.67%(14/21),根治性切除率为61.90%(13/21)。机器人手术可实现半肝切除、半肝+尾状叶切除、淋巴结清扫等复杂操作,一定程度上扩大了微创手术的适应证。
与传统的开腹肝门部胆管癌手术一样,其技术难点在于肝门区的显露、胆管成型及胆肠吻合。机器人的3D视野及放大作用在胆管成型相对于传统开腹和腹腔镜手术有极大的优势,本团队最多完成机器人下8根胆管的复杂重建和吻合操作(图4)。机器人系统在消化道重建时没有开腹便利,头高脚低体位会造成肠道自然下坠,牵引器械的缺乏很难将消化道稳固在镜下理想的位置,笔者根据机器人手术特点设计了L孔法简化了操作难度。肝门部胆

表3 微创肝门部胆管癌切除相关文献资料
注:NA.无相关数据
管癌手术应掌握必要的血管重建技术,机器人下操作缺乏有效的血管固定装置,因此对外科技术要求极高,不建议早期开展时联合血管重建。胆道手术是一个“上肝下胰”的手术,尤其是肝门部胆管癌手术,早期应做好机器人肝脏手术和机器人胰腺手术充分的技术储备及多学科协同进行充分的安全保障,不可仓促开展。

图4 Ⅰ型肝门部胆管癌机器人切除术后8根胆管开口,待成型和吻合
近年来达芬奇机器人手术系统在肝胆胰外科中逐渐开展,机器人手术的安全性与可靠性也逐步得到认可。Gonzalez-Ciccarelli等[29]学者指出,即使是高难度的肝胆手术,在经验丰富、操作熟练的手术团队下开展亦能够取得极好的临床疗效。本研究初步表明,机器人肝门部胆管癌切除术是安全可行的,具有一定的临床应用价值,但目前仍存在手术时间长、阳性切缘率高和术中操作欠规范等问题,有待进一步优化和解决。本研究存在的不足:样本量较少,在病例的选择上可能存在偏倚,缺乏与同期开腹及腹腔镜手术的对比研究。现阶段亟待积累更多的临床病例以优化手术操作,并侧重远期预后分析和对比研究。
