利用Kapitza-Dirac脉冲操控简谐势阱中冷原子测量重力加速度*
2019-10-25何天琛李吉
何天琛 李吉
(太原师范学院物理系,晋中 030619)
利用Feynman路径积分研究了简谐势阱中冷原子受到两次Kapitza-Dirac脉冲的干涉机制.理论研究表明:当初始态为简谐势阱的基态时,外场使不同模式的演化路径相对于没有外场情况下的路径发生偏离; 同时外场强度和测量时刻相邻模式的相位差成线性关系; 当外场为重力场时,测量重力加速度的精度可达10-9;当初始态为简谐势阱和外场作用下的共同基态时,测量精度会下降,同时原子间排斥和吸引相互作用的增强也会导致测量精度提高.
1 引 言
利用光波的相干性,光学干涉仪可以实现非常精密的测量,经典的光学干涉仪有Mach-Zehnder干涉仪、Michelson干涉仪等,但目前光学干涉仪的测量性能会受到光的波长的限制,还会在某些情况下受到实验仪器大小和尺寸的限制.利用物质波干涉仪从某种程度上能避免以上问题.最重要的一类物质波干涉仪就是原子干涉仪[1-8].近年来,由于激光冷却技术的成熟应用,原子干涉仪得到快速发展,在地球物理学[9]、计量学[10]、资源勘探[11]、精密惯性传感器[12]等领域被广泛应用.
相对于光波而言,重力对原子的影响更加明显,所以在测量重力加速度上,原子干涉仪[13-15]相对于传统的光学干涉仪更具有优势.使分束器作用于制备好的初始态,重力作用会使不同路径上的波包产生相位差,最后再使不同路径的波包相干叠加产生干涉条纹,这样就可以精确测量重力加速度[16,17].
对于理论上基于简谐势阱和Kapitza-Dirac脉冲(KD脉冲)的多模式冷原子干涉仪[18],它的测量精度可以随KD脉冲产生模式数的增加而提高.使用玻色-爱因斯坦凝聚体[19]来实现多模式冷原子干涉仪,理论计算结果表明非线性相互作用会影响干涉仪的测量精度[20].对于多模式冷原子干涉仪的两次KD脉冲,第二次脉冲选取的时刻很特殊,它是所有模式波包相干叠加的时刻,也是冷原子在受到第一次KD脉冲后在简谐势阱中演化的周期点.由于在冷原子演化过程中,简谐势阱会受到外界环境的扰动,同时实验平台的微小振动还会导致KD脉冲产生微小的平移[21],这些都会对测量精度产生影响.降低此影响最直接的方法就是缩短冷原子的演化时间.在此过程中,不但需要选取较合适的测量时刻而且还需保证两次KD脉冲对冷原子的作用.
本文通过改变第二次KD脉冲的时刻来缩短冷原子在简谐势阱中的整体演化时间,采用Feynman路径积分来研究简谐势阱中冷原子的动力学演化以及干涉机制,并且给出外场为重力场时的测量精度.
2 简谐势阱中冷原子受两次KD脉冲的模型
考虑一团冷原子处在频率为 ω 简谐势阱的基态(如图1所示).在 t=0 时刻加第一次 KD脉冲,初始波包被劈裂成许多动量不同的模式(模式的运动轨迹在图1中用不同的颜色标记).这些模式在简谐势阱和外场 β 的共同作用下演化.当t=π/(2ω),相邻模式之间的距离达到最大,加第二次KD脉冲会劈裂 t=π/(2ω) 时刻的波包,产生出更多的模式.在 tf=π/ω ,不同模式相干叠加.通过测量原子在每个模式的分布,可以获得外场强度.
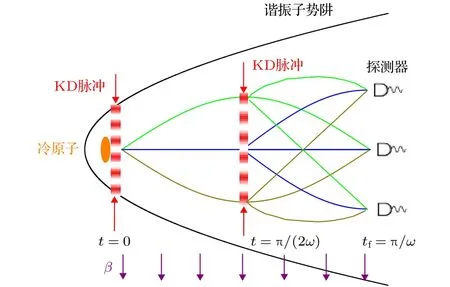
图1 简谐势阱中冷原子受到两次KD脉冲的示意图 在测量时刻 tf=π/ω ,不同模式相干叠加,β 为外场Fig.1.Diagram of cold atoms with two KD pulses in harmonic oscillator potential.At the measurement time tf=π/ω,the coherent superposition of different modes occurs.β is the external field.
系统哈密顿量为
其中 Vβ=βx 为待测外场的势函数,β 为外场强度;Vh=mω2x2/2,m 为原子质量,ω 为简谐势阱频率,特征长度为

为作用在冷原子上的KD脉冲.实验上采用激光在非常短的时间内形成余弦周期势 V0Ercos(kx) 来实现KD脉冲[23],这里(2ΔEr)为脉冲强度,ΩRabi为共振行波的Rabi频率,Δ=ωlight-ωatom为原子和光之间的频率失谐量,Er为反冲能量,k=4π/λ 且 λ 为实现脉冲的激光波长.在Raman-Nath区域内[23],由于KD脉冲持续时间很短,导致冷原子的波函数只增加一个相因子,态密度分布函数不会发生任何改变.同时,对于软光晶格中的冷原子,会出现局域场效应[24,25].这里,KD脉冲起着类似经典光学干涉仪中分束器的作用.简谐势阱可以使分开的原子束相干叠加,类似于反射镜.
3 系统的动力学演化
3.1 冷原子受到第一次KD脉冲
对于简谐势阱的基态,有

这也是冷原子初始时刻 t=0 的波包,加第一次KD脉冲可以得到
对于系统的动力学演化过程,可以采用Feynman路径积分的方法[21]来计算波函数的含时演化过程.简谐势阱中的传播子为
通过路径积分,可以得到
且有
(4)式中l (取整数)标记在第一次KD脉冲后的每一个模式,在数学上 l∈(-∞,∞).由于模式的幅度值随着 |l| 的增加而衰减,实际情况下模式数是非常有限的[22].
(4)式中x1=-2βσ2sin2(ωt/2)/(ℏω)为所有模式因外场效应在实空间产生的偏移.x2=kσ2sin(ωt)表明每个模式随时间以正弦函数的形式变化.θl(t) 为每个模式的相位随时间变化的函数,有
在计算(3)式的过程中使用到了(2)式,对应的时间段为 0≤t≤τ/2.
3.2 冷原子受到第二次KD脉冲
当 t=τ/2 时,给系统加第二次KD脉冲可以得到

原则上通过传播子积分可以得到系统任意时刻的演化规律.对于系统在 t=τ/2 的波函数,我们可以在(3)式中取特定时刻 t=τ/2 计算得出.给冷原子作用第二次KD脉冲之后,系统产生了更多的模式,这些模式在测量时刻 tf=τ 相干叠加.由Feynman路径积分
得到

(7)式中,ϕ1(x,l,β) 为每一个模式在 tf=τ 的波函数
且
计算(7)式的过程中使用了第一类贝塞尔函数的性质[20].(8)式为第二次KD脉冲后每一个模式的波函数,可以看出每一个模式的波包都呈现出高斯函数的形式.Θl(x) 为每个模式对应的相位.不同模式的波包在测量时刻将完全分开,满足非重叠条件

此时,测量时刻系统的态密度分布函数为
从(11)式可以看出,测量时刻的波包为高斯波包,外场的作用使每个高斯波包在x方向发生了平移.
对于冷原子干涉仪而言,不同路径的相位差是一个非常重要的物理量,它直接决定了测量时刻的干涉条纹,且与测量精度有非常密切的关系[16,17].在本文提出的干涉装置中,使用(9)式可以得到测量时刻不同模式之间相位差和外场强度的关系.在非重叠条件(10)式下,由于波包上的每一点都有相位值,相邻两波包中心距离为 Δl=kσ2,把相邻模式波包上幅度值相同的对应点的相位值相减,得到

(13)式就是测量时刻相邻模式的相位差和重力加速度的关系,可以看出在简谐势阱频率 ω 和KD脉冲的激光波长 λ 确定的情况下,重力加速度以线性函数的方式改变相邻模式的相位差.KD脉冲的强度V并未出现在(13)式中,也就是说KD脉冲的强弱不会影响相邻模式的相位差,进而不会影响测量精度,这将与我们在第四部分计算的结果相一致.
3.3 系统的整体动力学演化规律
采用简谐势阱的特征长度 σ 作为长度量纲,简谐势阱的特征时间 1/ω 作为时间量纲对系统进行无量纲化.系统在两次KD脉冲后的态密度分布函数含时演化规律如图2、图3和图4所示.本节所有图中和文中的参数都已无量纲化.图2中,两次KD脉冲的强度都是 V=1.第一次KD脉冲加在时刻 t=0.由于 V=1 ,所以初始的波包被劈裂成3个模式(l=0,±1).l来自(1)式中第一类贝塞尔的下角标,用来标记不同模式.这三个模式在简谐势阱中分别沿不同的路径演化.从图中可以看出,上下模式(l=±1)的态密度分布是对称的.中间模式(l=0)的态密度分布的最大值要比其他两个的模式大一些,也就是说大部分冷原子集中在中间的模式上.当系统演化到时刻 t=π/2 ,上、下两个模式离中间模式的距离达到最大 ΔL=(M-1)k.此时加第二次KD脉冲,之前每个模式又被劈裂成3个模式(l′=0,±1).为了与l区别,l'来自第二次KD脉冲中第一类贝塞尔的下角标.这些不同的模式在简谐势阱的作用下演化,同时发生相干叠加.从图中我们可以看出在测量时刻 t=π ,(l=1,l′=1)、(l=0,l′=1)和(l=-1,l′=1)这三个模式相干叠加,形成了上面的波包.同理,中间的波包是由 l=-1,0,1 三个模式的 l′=0 分量相干叠加形成的.下面的波包是由l=-1,0,1三个模式的 l′=-1 分量相干叠加形成的.相对t=3π/4时刻的态密度分布,t=π 时刻的波包分布形式上更加简洁,有助于我们在下一节来计算系统的测量精度.
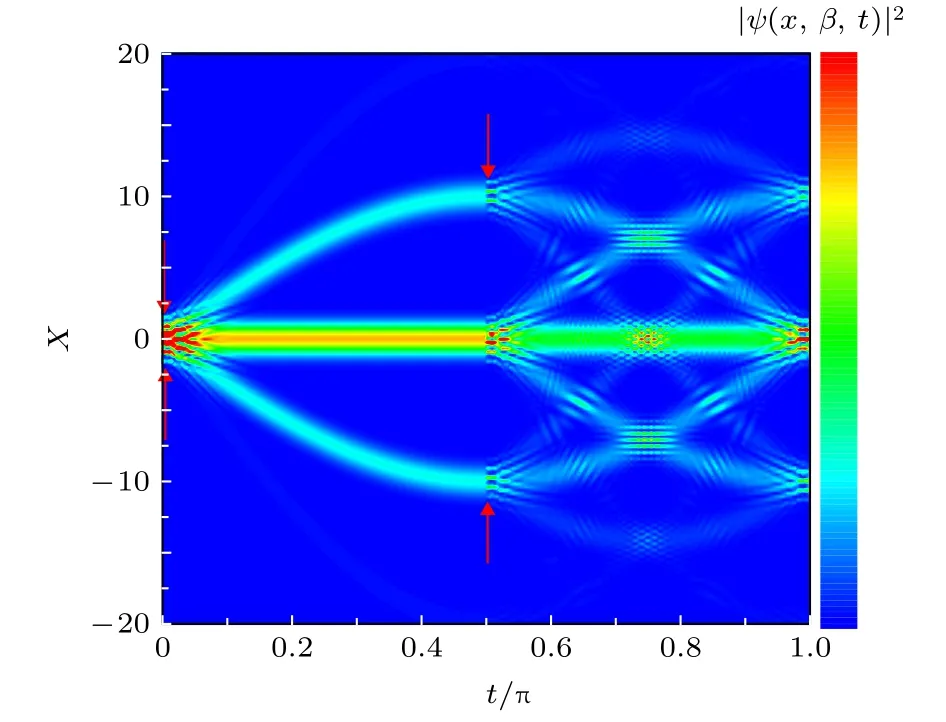
图2 没有外场的情况下(β=0),系统态密度分布函数的演化规律 无量纲参数为 V=1,k=10 ,测量时刻在t=tf=π,两次KD脉冲都用红色箭头表示,态密度演化图右边的彩色条表示态密度分布函数值由低(蓝色)变到高(红色)Fig.2.In the absence of an external field (β=0),the density distribution function of system varies with time.The dimensionless parameter are V=1,k=10.The measurement time is at t=tf=π.Both KD pulses are represented by red arrows.The color bar on the right side of the density of states evolution diagram indicates that the value of the density distribution function changes from low(blue) to high (red).
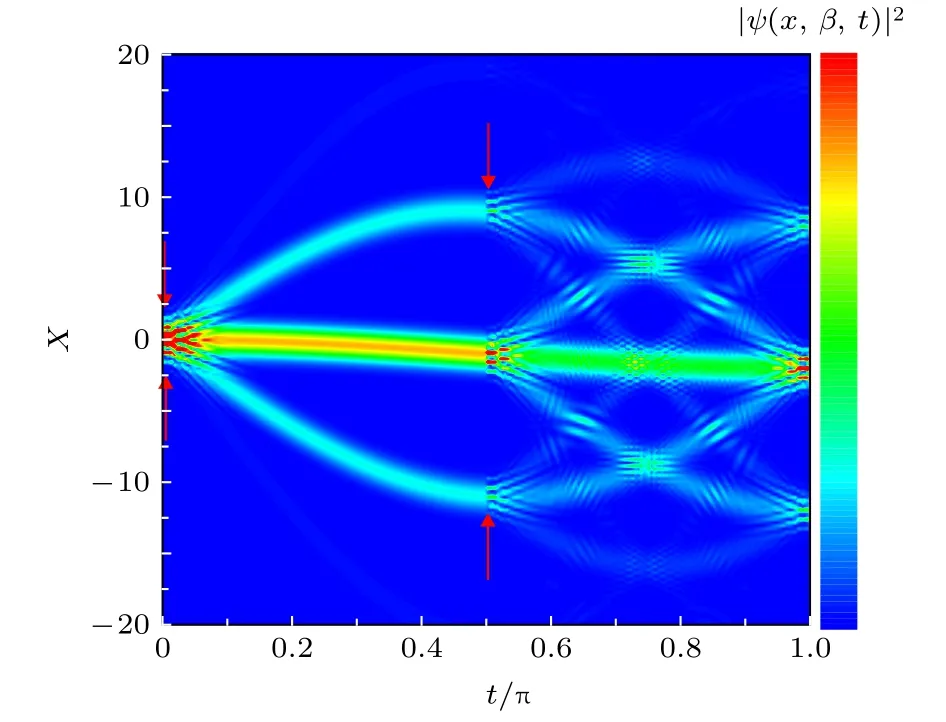
图3 在外场 β=1 的情况下,系统态密度分布函数的演化规律 图中除 β 之外的其他无量纲参数与图2相同,红色箭头为KD脉冲,测量时刻在t=tf=πFig.3.In the case of external field β=1 ,the evolution of density distribution function of the system is obtained.The dimensionless parameters in this figure are the same as those in Figure 2.The red arrow are KD pulses.The mea surement time is at t=tf=π.
图3显示了外场强度 β=1 的情况下,系统的整体态密度演化.相对于图2没有外场的情况,第一次KD脉冲后,l=0,±1 模式由于外场的作用向X轴负方向发生偏移.在 t=π/2 时刻,偏移的距离为 |-β|=1.在第二次KD脉冲后,所有的模式继续在外场的作用下发生整体偏移,但这并不影响测量时刻上中下三个波包的形成.波包中心偏移x=0的距离为 |-2β|=2.这个偏移的距离从图5中也可以得到.这说明测量时刻的波包包含了外场的信息.我们可以通过测量时刻不同模式的分布来反向计算外场的强度.
在图4中,进一步将外场强度增加到 β=2.对比图3,外场增加了所有波包在演化过程中的下移程度.虽然外场变强,但并没有影响不同模式在测量时刻的相干叠加.
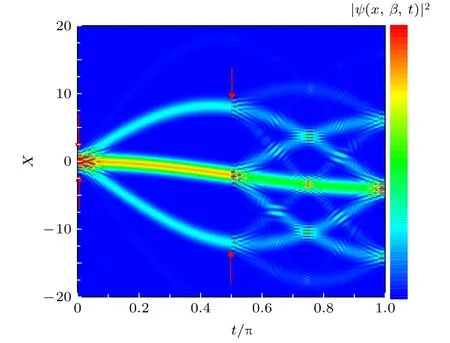
图4 在外场 β=2 的情况下,系统态密度分布函数的演化规律 图中除 β 之外的其他无量纲参数与图2相同,红色的箭头为KD脉冲,测量时刻在t=tf=πFig.4.In the case of external field β=2 ,the evolution of density distribution function of the system is obtained.The dimensionless parameters in this figure are the same as those in Figure 2.The red arrow are KD pulses.The measurement time is at t=tf=π.
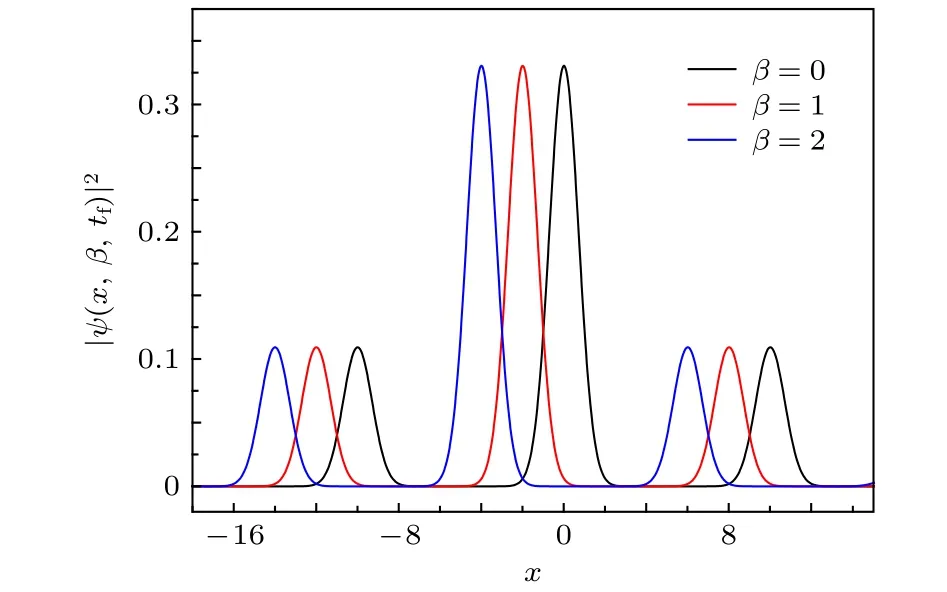
图5 图2、图3、图4中测量时刻 tf=π 态密度的分布规律Fig.5.The density distribution functions at measuring time tf=πfor figure 2,3,and 4.
在图5中,我们展示了图2-4中的测量时刻态密度分布.可以发现,外场的作用仅仅使不同模式的波包发生了偏移,并未改变三种情况下波包的形状.这样,我们就可以在下一节通过波包在外场作用下的移动来计算Fisher信息,进而得出干涉仪的测量精度.
4 系统测量重力加速度的精度
使用本文提出的干涉测量法,可以用来测量重力加速度.当外场为重力场时 β=mg ,系统的Fisher信息[26]为

使用测量时刻的态密度分布函数(11)式、测量时刻的非重叠条件(10)式和第一类贝塞尔函数的性质[20],通过解析计算得到

通过Cramer-Rao lowér bound[26]
可以计算得到

在(17)式中,N为无关联的原子数,p为测量的次数.可以看出如果想要提高干涉仪的测量精度,可以通过降低简谐势阱的频率、提高原子质量和增加测量次数来实现.最后的测量精度表达式中没有出现脉冲强度V,表明其不受KD脉冲影响.这与我们在第三部分的分析结果一致.接下来,考虑107个23Na 原子囚禁在简谐势阱中,简谐势阱的频率为 ω=12.4Hz[27],可以计算出干涉仪的测量精度为

在整个过程中,23Na 原子从受到第一次KD脉冲到测量时刻的总演化时间为 253ms ,所有模式的波包在自由空间占据的最大宽度约为 4.48×10-4m.由于冷原子在整个演化过程中都处在简谐势阱中,所以理论上讲是没有原子损失的,这对提高测量精度是有益的.冷原子占据的最大宽度为 10-4m 量级说明整个装置的空间较小,对在实验上用此装置测重力加速度较为有利.
5 初始态为简谐势阱和外场的基态
在之前的计算中,系统的初始态为简谐势阱的基态.由于干涉装置一直处于外场中,外场会破坏简谐势阱的对称性.简谐势阱的基态就会发生改变.需要使用系统处在外场和简谐势阱共同作用下的基态作为初始态.在 t=0 且没有加第一次KD脉冲之前,系统的哈密顿量为

对(19)式进行变形,得


由于(21)式的基态为
所以(19)式的基态为
(23)式与3.1节使用的简谐势阱基态,不同之处在于由于外场的作用导致初始的高斯波包整体在x轴上发生了平移.
与之前的步骤类似,将(23)式作为初始态,加两次KD脉冲,使用传播子积分,可以得到测量时刻的波函数为
不同模式的波包在测量时刻满足非重叠条件

测量时刻系统的态密度分布函数为
对比(11)式,(27)式表明测量时刻系统整体的态密度分布在x轴上移动的距离减少了 βσ2/(ωℏ).当 β=mg 时,使用(14)式可以得到系统的Fisher信息为

通过Cramer-Rao lowér bound,可以得到
对比(17)式,可以看出Cramer-Rao lowér下限值提高了一倍,进而表明测量精度下降了一倍.采用第4节的实验数据可以得到

6 非线性相互作用对系统测量精度的影响
在之前的计算中,我们并没有考虑冷原子之间具有非线性相互作用.考虑此作用对系统的影响[20],系统的哈密顿量变为

式中 g1为非线性相互作用参数.首先采用虚时演化[28]数值计算了

得到不同非线性相互作用下的基态,然后采用这些基态作为初始态,使用算符劈裂法[29]对系统进行了数值演化,得到测量时刻的态密度分布函数,最后数值计算(14)式和Cramer-Rao lowér bound.在以上计算中,采用3.3节的无量纲化.以简谐势阱的特征长度 σ 为长度量纲,特征时间 1/ω 为时间量纲,对(31)式子进行了无量纲化.下文中所有的参数都是无量纲的.
图6和图7显示了系统在不同非线性相互作用下的基态,从图中可以发现原子间的排斥相互作用使初始的波包变宽,吸引相互作用使初始的波包变窄.
从图8可以看出,即使在存在非线性相互作用的情况下,不同模式在测量时刻仍然满足非重叠条件.随着排斥相互作用的增强,每个模式波包上的振荡幅度变得更大.图9是图8中0模式的放大图.在这个图中,排斥相互作用对测量时刻态密度分布的影响显示更加清晰.
图10显示了在吸引相互作用的情况下,系统测量时刻态密度的分布规律.首先可以看出态密度分布函数满足非重叠条件,其次和排斥相互作用的情况类似,吸引相互作用的增强使测量时刻态密度上每一个波包的振荡程度加剧.图11是图10中0模式得放大图,在图11中可以更加清楚地看到这一点.
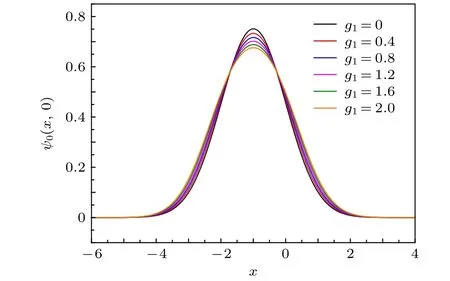
图6 外场 β=1 的情况下系统基态的态密度分布函数,不同的颜色对应不同非线性相互作用下的态密度分布函数Fig.6.In the case of external field β=1 ,the density distribution function of the ground state of the system.Different colors correspond to the density distribution function under different non-linear interactions.
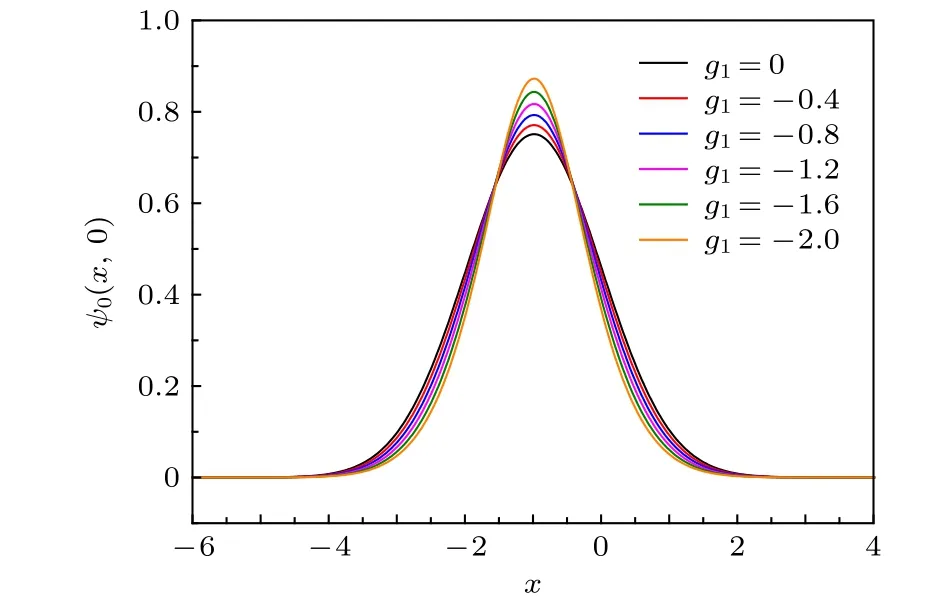
图7 在外场 β=1 的情况下系统基态的态密度分布函数,不同的颜色对应不同非线性相互作用下的态密度分布函数Fig.7.In the case of external field β=1 ,the density distribution function of the ground state of the system.Different colors correspond to the density distribution function under different non-linear interactions.
当非线性参数改变时,系统测量精度的变化规律显示在图12中.我们首先计算了线性情况下(g1=0)系统的测量精度,然后通过改变非线性参数计算了测量精度且给出了和线性情况下测量精度的比值.从图12中可以看出,g1=0 时数值计算和解析计算的结果符合得很好.随着排斥相互作用和吸引相互作用的增强,系统的测量精度存在上升的趋势((Δβ非线性/β)/(Δβ线性/β)的值越小,系统的测量精度越高),且相对于非线性参数的变化具有较好的对称性.当 |g1| 增加到2时,测量精度会提升一个数量级.实验上可以通过Feshbach共振技术[30]来调节吸引和排斥相互作用,进而改变非线性相互作用对测量精度的影响.
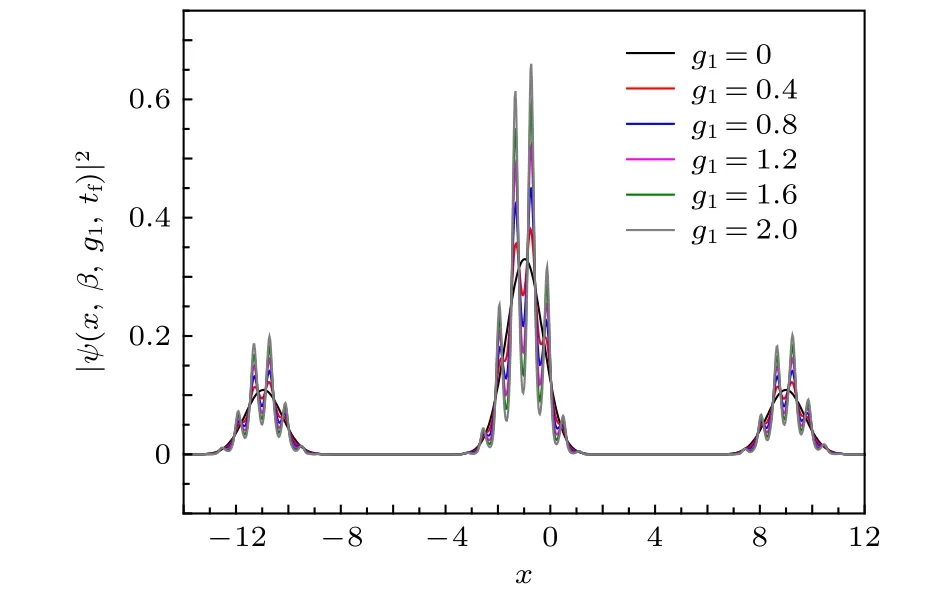
图8 在 V=1,k=10,β=1 的情况下测量时刻的态密度分布函数,不同的颜色对应不同非线性相互作用下的态密度分布函数Fig.8.In the case of V=1,k=10,β=1 ,the density distribution functions at measuring time.Different colors correspond to the density distribution function under different non-linear interactions.
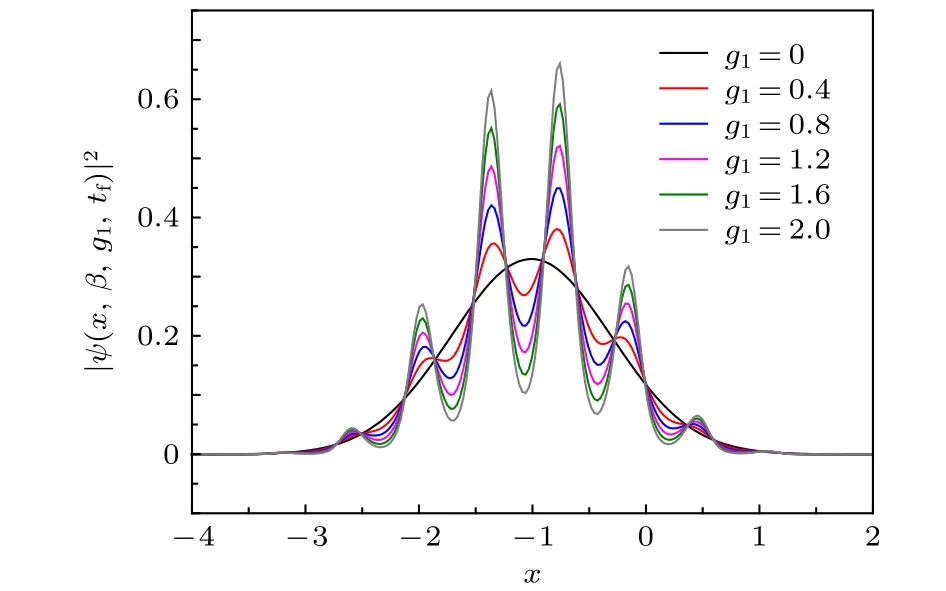
图9 图8中0模式的放大图Fig.9.Detailed diagram of 0 mode in Fig.8.
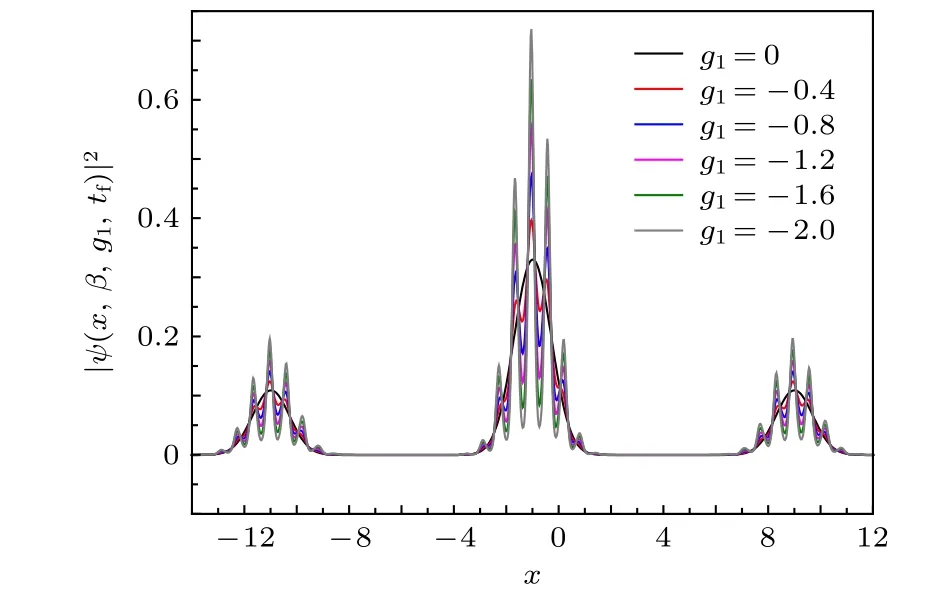
图10 测量时刻系统态密度的分布函数,除了非线性参数以外的其他无量纲参数和图8相同Fig.10.The density distribution functions at measuring time,dimensionless parameters other than non-linear parameters are the same as those in Fig.8.
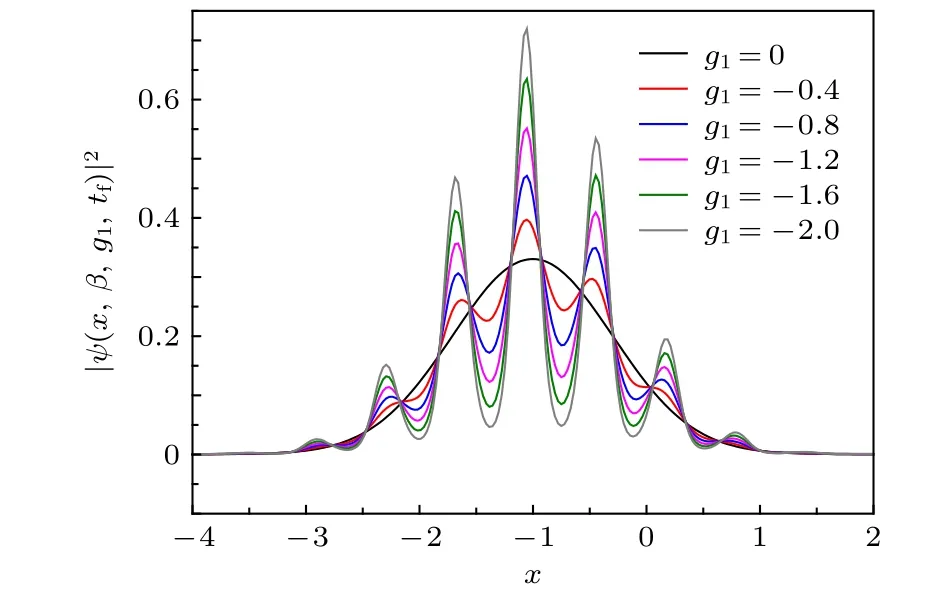
图11 图10中0模式的放大图Fig.11.Detailed diagram of 0 mode in Fig.10.

图12 系统的测量精度随非线性参数的变化规律,除了非线性参数以外的其他无量纲参数和图8相同Fig.12.The variation of measuring accuracy of the system with nonlinear parameters,dimensionless parameters other than non-linear parameters are the same as those in Fig.8.
7 结 论
本文研究了简谐势阱中的冷原子在受到两次KD脉冲的动力学演化机制,采用Feynman路径积分的方法计算了整体的动力学过程和测量时刻的态密度分布函数.计算结果表明:增加外场的强度会导致态密度分布整体向x负方向偏移,偏移的程度与外场强度成正比例,但是外场并未影响到测量时刻态密度分布的幅度值.对于外场为重力场,我们可以通过降低简谐势阱的频率和增加原子质量来提高干涉仪的测量精度.当初始态为简谐势阱的基态时,使用实验参数计算得出此干涉装置测量重力加速度的精度可以达到 10-9.对于初始态为简谐势阱和外场的基态,计算结果表明测量精度会下降,同时非线性相互作用的增强也会使测量精度提高.
