三端磁隧道结的稳定性分析*
2019-10-25王日兴李雪李连肖运昌许思维
王日兴 李雪 李连 肖运昌 许思维
1) (湖南文理学院师范学院,常德 415000)
2) (湖南文理学院,洞庭湖生态经济区建设与发展省级协同创新中心,常德 415000)
在理论上研究了磁隧道结/重金属层组成的三端磁隧道结中磁性状态的稳定性.以包含自旋转移矩和自旋轨道矩的Landau-Lifshitz-Gilbert (LLG)方程为基础,通过对平衡点进行线性稳定性分析,得到了以钉扎层磁化向量方向和自旋轨道矩电流密度为控制参数的相图.相图中包括平面内的进动态和稳定态以及伸出膜面的进动态和稳定态.当钉扎层磁化向量在垂直薄膜平面内旋转时,通过调节钉扎层磁化向量方向,可以实现自由层磁化向量从稳定态到进动态的转化.当钉扎层磁化向量在薄膜平面内旋转时,在钉扎层磁化向量方向与自由层易磁化轴方向平行或者反平行的结构中,失稳电流最小,当钉扎层磁化向量方向逐渐偏离这两个方向时,失稳电流不断增加.调节自旋转移矩电流密度,可以实现磁化翻转,在自旋轨道矩的辅助下,可以减小翻转时间.相图的正确性通过画不同磁性状态磁化向量随时间的演化轨迹得到了验证.
1 引 言
早期磁性随机存储器的数据写入方式依靠磁场来完成.1996年,Slonczewski[1]和Berger[2]在理论上预测了自旋转移效应.当垂直于钉扎层/隔离层/自由层组成的三明治自旋阀结构加以电流时,电流首先获得与钉扎层磁化向量方向相同的自旋角动量,当其流经隔离层进入到自由层时,由于角动量守恒,将给自由层磁化向量施加力矩,在此力矩的作用下,自由层磁化将产生进动[3],甚至发生翻转[4-8].2000年,自旋转移效应获得了实验验证[5],2004 年被成功地应用到磁性隧道结的数据写入[9].自旋转移矩驱动磁化翻转给磁性隧道结的数据写入带来了一种纯电学的全新写入方式[10-11].由于其具有非易失性、快速写入和可无限擦写等优点,目前绝大部分的磁性随机存储器都采用自旋转移矩的数据写入方式,被称为第二代磁性随机存储器.然而,随着人们对低功耗和高密度提出的更高要求,自旋转移矩磁性隧道结遭遇了能量和速度瓶颈问题,磁性隧道结迫切需要一种新的数据写入方式[11-14].
近年的实验表明[15-23],自旋霍尔效应[24-26]诱导的自旋矩也可以实现可靠和快速的磁化翻转.在铁磁层/重金属层组成的双层膜结构中,如果沿重金属层给此结构施加电流,由于自旋霍尔效应,流经重金属层的电流将沿垂直方向产生纯的自旋流,从而给铁磁层磁化向量施加一个力矩,即自旋轨道矩.与传统的自旋转移矩比较,自旋轨道矩不仅写入速度更快,而且几乎可以避免势垒击穿,有望成为新一代的磁存储技术[19-23].Liu等[17,27,28]还同时考虑自旋转移矩和自旋轨道矩的作用,设计了磁隧道结/重金属层组成的三端磁隧道结结构.与传统的二端磁隧道结装置和自旋阀纳米振荡器相比较,三端磁隧道结装置可以通过两个电流密度来单独控制磁动力学和输出功率,因此为控制电流驱动的磁动力学提供了新的自由度,这个简单、可靠和有效的设计或许可以消除新一代磁随机存储器的主要技术障碍[11-13,17].
稳定性分析方法[29-40]是研究磁动力学强有力的工具,通过稳定性分析方法,不仅可以建立磁性状态相图,而且可以获得磁化向量在不同磁性状态之间转化的最小电流密度.尽管学术界对三端磁隧道结展开了一定的研究,但是对该结构中自旋转移矩和自旋轨道矩同时驱动的磁化动力学的理论研究仍然缺乏.充分利用自旋转移矩和自旋轨道矩各自的优点,更好地理解三端磁隧道结中磁性状态的稳定性将为实现新一代的磁性随机存储器的应用提供有价值的参考.本文以磁隧道结/重金属层组成的三端磁隧道结为理论模型,同时考虑自旋转移矩和自旋轨道矩的作用,对该结构中磁性状态的稳定性进行了理论分析.通过对包括自旋转移矩和自旋轨道矩的基于宏自旋近似的Landau-Lifshitz-Gilbert (LLG)方程进行线性化展开,然后对方程的平衡点进行稳定性分析,获得了钉扎层磁化向量方向在不同平面旋转时的相图.通过数值求解微分方程的方法,给出了相图中不同区域的磁化向量随时间的变化关系,从而验证了相图的正确性.
2 线性化展开
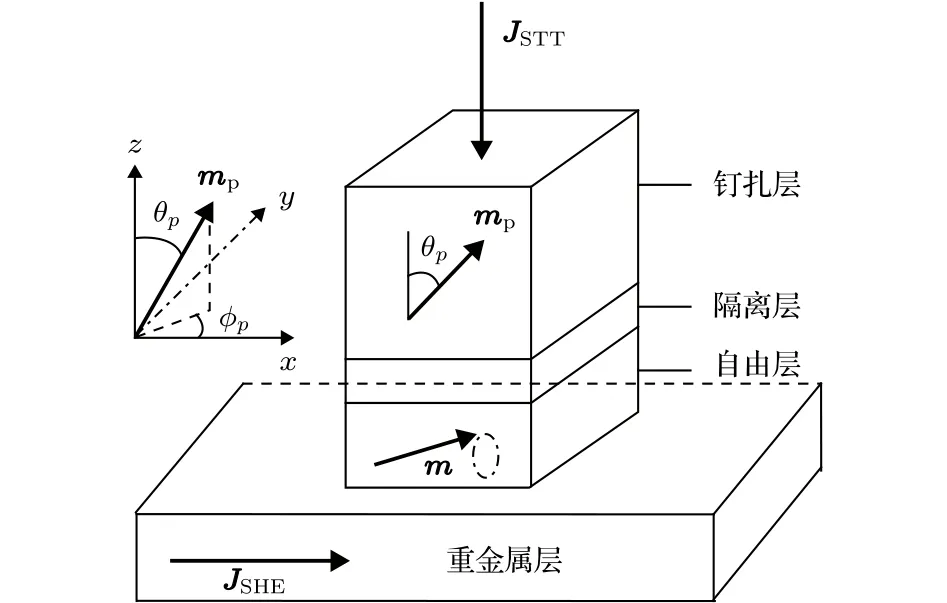
图1 理论模型和坐标系Fig.1.Theoretical mode and coordinate system.
图1为本文所研究的磁性隧道结/重金属层组成的三端磁隧道结的理论模型和坐标系,坐标系的x-y平面沿多层膜的膜面,垂直于膜面的方向为z轴.在磁性隧道结中,两铁磁层被中间的隔离层所隔开,上面较厚的铁磁层是钉扎层,其磁化沿易磁化轴方向且被固定.下面较薄的铁磁层是自由层,其易磁化沿x轴方向.自由层下面是重金属层.如果垂直于三端磁隧道结结构和沿金属层膜面同时给三端磁隧道结施加电流时,由于局域磁矩和自旋极化电流的相互作用,垂直于三端磁隧道结结构的电流将会给自由层磁化向量施以自旋转移矩.同时,由于自旋霍尔效应,沿重金属层膜面施加的电流会给自由层磁化向量施加自旋轨道矩.基于宏自旋近似,三端磁隧道结中自由层磁化向量的磁动力学可以用以下LLG方程来描述[1,2]:
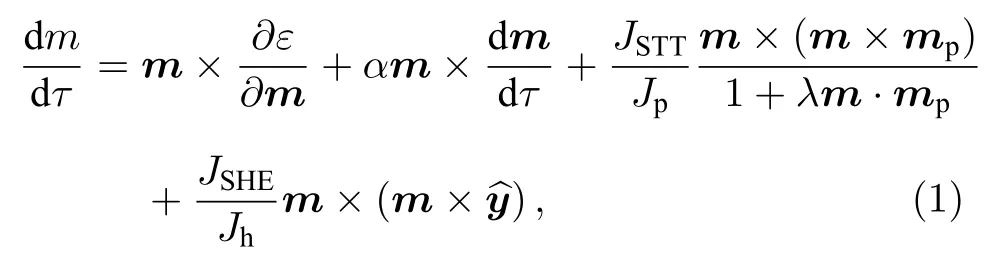
式中,m为自由层的磁化向量.mp=(px,py,pz)=(sinθpcosϕp,sinθpsinϕp,cosθp)为钉扎层的磁化向量,其中 θp和 ϕp分别为钉扎层磁化向量的极角和方位角.τ和ε为时间和能量,单位分别为1/(γMs)和其表达式分别为 τ=γMst ,ε=Q/2(1-sin2θcos2ϕ)+1/2cos2θ,式中γ为旋磁比,Ms为自由层的饱和磁化强度,Q=Hk/Ms,Hk为各向异性场,θ和φ为三端磁隧道结自由层磁化向量的极角和方位角.磁场能有退磁能和各向异性能.α为吉尔伯特阻尼常量.JSTT为自旋转移矩电流密度,定义电流从钉扎层流向自由层时为正,反之为负.自旋转移矩对应的系数Jp=[3(1+P)3/(2P3/2)-其中 P是自旋极化率,e是电子的电荷量,µ0是真空磁导率,d是自由层的厚度,ℏ 是约化普朗克常量.描述两铁磁层磁化向量方向对自旋转移矩影响的系数λ=(1+P)3/[3(1+P)3-16P3/2].JSHE为自旋轨道矩电流密度,其对应的系数其中,θSH为自旋霍尔角.为沿y方向上的单位向量.
利用球坐标系知识将方程(1)展开,可以得到关于θ和φ的微分方程组:

式中pr=pxsinθcosϕ+pysinθsinϕ+pzcosθ,pθ=pxcosθcosϕ+pycosθsinϕ-pzsinθ,pϕ=-pxsinϕ+pycosϕ,是钉扎层磁化向量在球坐标系中的三个组分.
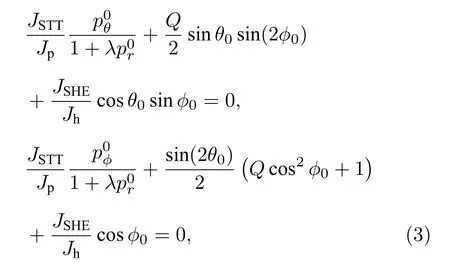
没有电流时,自由层磁化向量稳定在x轴或-x轴方向.当垂直于钉扎层和沿金属层膜面施加电流时,自由层磁化向量将产生新的平衡位置(θ0,ϕ0).在微小扰动的作用下,自由层磁化向量将在新平衡位置附近振动.令 θ=θ0+δθ ,ϕ=ϕ0+δϕ ,其中,δθ 和 δϕ 为磁化向量相对于新平衡位置的偏离,代入方程(2)并保留 δθ 和 δϕ 的线性项,可以得到关于 θ0和 ϕ0的方程组:
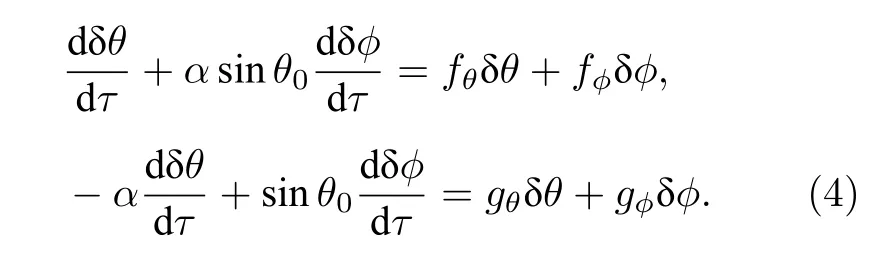
以及关于 δθ 和 δϕ 的线性微分方程组
式中,

其中
3 结果与讨论
假设自由层磁化向量绕平衡位置做周期性振动,令 δθ=Δθeiωt和 δϕ=Δϕeiωt,其中 Δθ 和 Δϕ 为振幅,代入方程组(4),可得

其中 µ=iω.由(5)式可得

其中
由线性稳定性理论[33]:当 Δ>0 时,如果 T>0 ,平衡点不稳定,T<0 时,平衡点稳定; 而当 Δ<0 时,平衡点为鞍点.
下面以具有面内磁各向异性的FeNi/Co双层膜为例[41],通过(3)式计算新的平衡点,然后根据(7)式和(8)式以及线性稳定性理论对新的平衡点进行稳定性分析.相关的材料参数为[34,37,39,41]:旋磁比 γ=2.2117×105m/(A·s) ,阻尼系数 α=0.02 ,饱和磁化强度 Ms=8.8×105A/m ,铁磁层的厚度d=3.5nm ,自旋极化率 P=0.3 ,各向异性场Hk=8×103A/m ,有效的自旋霍尔角 θSH=0.3[18].
3.1 以钉扎层磁化向量极角 θp 和自旋轨道矩电流密度JSHE为控制参数的相图
新的平衡位置可以通过解方程组(3)获得,由(7)式和(8)式以及线性稳定性理论,可以获得三端磁隧道结的磁性状态相图.图2给出了自旋转移矩电流密度 JSTT=0.8 A/µm2和 ϕp=0°时,以钉扎层磁化向量的极角 θp和自旋轨道矩电流密度JSHE为控制参数的磁性状态相图.图中黑色实线和蓝色虚线为自由层磁化向量沿x和-x方向的失稳电流,绿色和红色点虚线为自由层磁化向量沿z和-z方向的失稳电流.

图2 以钉扎层磁化向量极角 θp 和自旋轨道矩电流密度JSHE为控制参数的相图Fig.2.The phase diagram defined in parameter space spanned by the polar angle of pinned-layer magnetization vector θp and the current density of spin-orbit torque JSHE.
由图2可知,当钉扎层磁化向量在垂直于薄膜平面旋转时,相对于自旋轨道矩,自旋转移矩强度较大,在驱动三端磁隧道结的磁动力学中起着主导作用,因此自旋轨道矩电流密度对相图的影响较小,但通过调节钉扎层磁化向量的方向,我们可以获得不同的磁性状态.当钉扎层磁化向量在x轴附近时,即 76.6°<θp<103.6°时,系统为平面内的稳定态,如果自由层磁化向量的初始磁化方向沿x轴时,其最终稳定在x轴附近(quasi-P),如果沿-x轴时,其最终稳定在-x轴附近(quasi-AP),定义该区域为“quasi-P or quasi-AP”.随着钉扎层磁化向量方向逐渐远离x轴方向时,如果自由层磁化向量初始磁化沿-x方向时,其表现为平面内的进动态(inplane precessional state,IPP),将其定义为“quasi-P or IPP”,在相图中对应的区域为66.5° < θp<76.6°和 103.6°<θp<113.5°.随着钉扎层磁化向量继续远离x轴方向,即26.1° < θp< 66.5°和113.5° < θp< 153.8°时,自由层磁化向量表现为伸出膜面的进动态(out-of-plane precessional state,OPP).当钉扎层磁化向量方向在垂直膜面附近,即0° < θp< 26.1°和 153.8°<θp<180°时,自由层磁化向量为伸出膜面的稳定态(out-of-plane state,OPS).
为了证明磁性相图的正确性,我们在图2中选取了具有不同钉扎层磁化向量方向的a,b,c,a′,b′,c′六点,将其对应的钉扎层磁化向量的极角θp和自旋轨道矩电流密度 JSHE代入微分方程组(2),通过数值方法求解方程组(2),给出了自由层磁化向量随时间的变化关系,如图3所示.蓝色和红色线条表示三端磁隧道结自由层磁化向量的初始方向分别沿x和-x方向.图3(a)和(a′)表明当初始磁化方向沿x轴时,自由层磁化向量稳定在x方向附近,而当初始磁化方向沿-x方向时,自由层磁化向量为平面内的进动态.图3(b)和(b′)表明自由层磁化向量为伸出膜面的进动态,并且与初始磁化方向无关.图3(c)和(c′)为伸出膜面的稳定态,由图可知,自由层磁化向量经过一段时间后最终稳定在z轴或-z轴方向,也与其初始磁化方向无关.
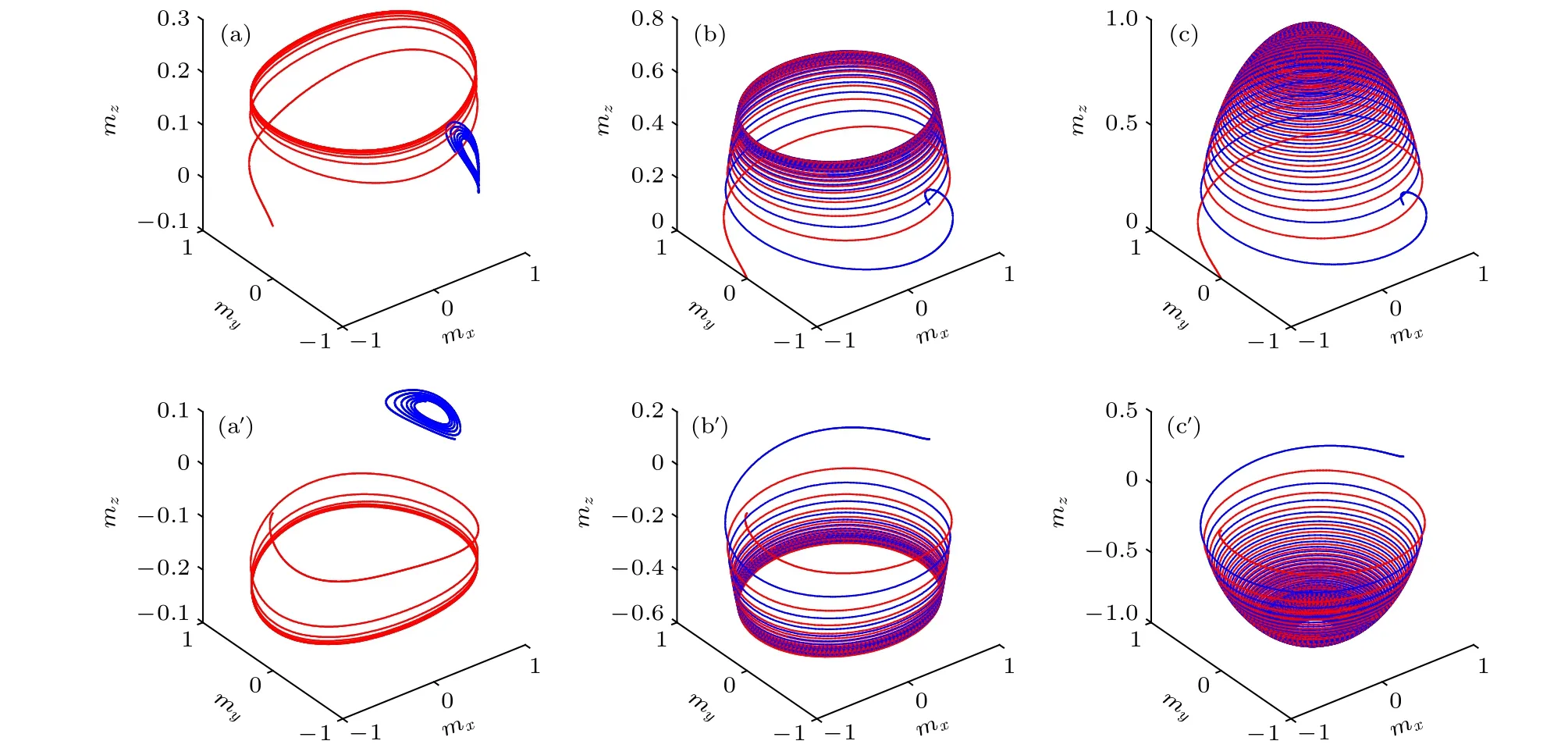
图3 对于图2中不同区域a, b, c,a′ ,b′ ,c′ 六点,自由层磁化向量随时间的演化轨迹 (a)和(a′)准平行稳定态或平面内的进动态; (b)和(b′)伸出膜面的进动态; (c)和(c′)伸出膜面的稳定态Fig.3.The time evolutions of free-layer magnetization vector for six points a,b,c,a′ ,b′ and c′ in different regions of Fig.2.(a)and (a′) quasi-P or IPP state; (b) and (b′) OPP state; (c) and (c′) OPS states.
3.2 以钉扎层磁化向量方位角ϕp和自旋轨道矩电流密度 JSHE 为控制参数的相图
在图4中,以钉扎层磁化向量方位角 ϕp和自旋轨道矩电流密度 JSHE为控制参数,给出了θp=90°,自旋转移矩电流密度 JSTT=1.0A/μm2时的磁性状态相图.由于自旋转移矩主要在平面内,因此,对于相对小的自旋转移矩电流密度和自旋轨道矩电流密度很难产生伸出膜面的进动态和伸出膜面的稳定态.图中蓝色虚线和黑色实线分别为自由层磁化向量沿x和-x方向的失稳电流.由图可知,如果自由层磁化向量初始磁化方向沿x轴时,当钉扎层磁化向量方向在x轴或-x附近时,系统为平面内的进动态,如果自由层磁化向量初始磁化方向沿-x轴时,当钉扎层磁化向量方向在-x轴附近时,系统也为平面内的进动态.而且当钉扎层和自由层的磁化向量几乎平行或者反平行时,失稳电流最小.这是因为在平行或反平行结构中,自旋转移矩几乎为零.随着钉扎层磁化向量逐渐偏离x轴和-x轴方向,失稳电流不断增加.

图5 对应图4中的“a”点,自由层初始磁化沿x方向时磁化向量三个分量 mx ,my 和 mz 在不同自旋矩驱动下随时间的演化(a)自旋转移矩激发的平面内的稳定态; (b)自旋转移矩驱动磁化翻转; (c)自旋转移矩和自旋轨道矩共同激发的平面内的进动态;(d)自旋转移矩和自旋轨道矩共同驱动磁化翻转Fig.5.The time evolutions of three components mx ,my and mz driven by different spin torque in free-layer magnetization vector for point ‘a’ of Fig.4 with the initial magnetization along x direction:(a) IPS state excited by spin-transfer torque; (b) magnetization reversal driven by spin-transfer torque; (c) IPP state excited by spin-transfer torque and spin-orbit torque; (d) magnetization reversal driven by spin-transfer torque and spin-orbit torque.
计算发现:在传统的自旋阀或磁隧道结结构中,即 JSHE=0 ,当钉扎层磁化向量在平行薄膜平面内旋转且自旋转移矩电流密度较小时,如果自由层磁化向量的初始磁化方向沿x轴,系统为平面内的稳定态,自由层磁化向量最终稳定在x轴附近,增加自旋转移矩电流密度,可以实现磁化翻转.在三端磁隧道结中,给自由层磁化向量同时施加自旋转移矩和自旋轨道矩,在自旋轨道矩的辅助下,较小的自旋轨道矩电流密度可实现系统从稳定态到平面内进动态的转化.与传统的自旋转移矩驱动的磁化翻转相比较,自旋轨道矩辅助磁化翻转可以在一定程度上减小磁化翻转的时间.从图4中选取a点,在图5 中给出了自由层磁化向量初始磁化方向沿x轴时不同自旋矩驱动下磁化向量的分量随时间的演化轨迹.图5(a)和图5(b)为只受自旋转移矩,且自旋转移矩电流密度分别为1.0 A/µm2和1.5 A/µm2,由图5(a)可知,在较小的自旋转移矩作用下,系统为平面内的稳定态.增加自旋转移矩电流密度,经过一段时间,自由层磁化向量从x方向翻转到-x方向,如图5(b)所示.图5(c)和图5(d)为对系统额外施加自旋轨道矩且JSHE=1.0 A/µm2时自由层磁化向量随时间的演化轨迹,由图5(c)可知,当自由层磁化向量同时受到自旋转移矩和自旋轨道矩时,在自旋轨道矩的辅助下,系统为平面内的进动态,对应于图4中的“IPP or quasi-AP”区域.比较图5(b)和图5(d)可知,在自旋轨道矩的辅助下,磁化翻转的时间大约为原来的一半.
4 结 论
本文以磁隧道结/重金属层组成的三端磁隧道结为理论模型,基于宏自旋近似,通过对包含自旋转移矩和自旋轨道矩项的LLG方程进行线性展开,并对其平衡点进行稳定性分析,得到了以自旋轨道矩电流密度和钉扎层磁化向量的方向为控制参数的相图.相图中具有多种不同的磁性状态,例如:平面内的进动态和稳定态,伸出膜面的进动态和稳定态.通过画不同磁性状态磁化向量随时间的变化关系验证了相图的正确性.研究表明:选择不同的钉扎层磁化向量方向为电流驱动的磁化动力学提供了新的方法.当钉扎层磁化向量方向与自由层易磁化轴平行或者反平行时,失稳电流最小,当钉扎层磁化向量方向在薄膜平面内逐渐偏离这两个方向时,失稳电流增加.通过调节自旋转移矩电流密度,可以实现磁化翻转,自旋轨道矩的辅助可以减小磁化翻转的时间.
