基于视觉测量的舰载机空间定位方法
2019-10-24刘佳铭
刘佳铭
海军装备部,北京100071
0 引 言
作为舰载机机务保障的重要环节[1],舰载机在起飞前,需获得其空间位置信息。通常情况下,待起飞的舰载机可以利用母舰提供的基准信息,经预设参数空间位置,来使舰载机快速获得初始定位信息。舰载机初始空间位置的测量精度影响着舰载机导航的精度及机载武器的打击精度,其获取的效率影响着舰载机的机动反应能力[2-3]。
舰载机获得空间定位信息的方案有多种[4-8]:可通过舰船期间设计图纸的尺寸预先进行计算、装定,不过在实际建造过程中不可避免地会存在安装和加工误差;可应用舰船主惯导和差分GPS方法精确测定,但在GPS 信息不可用和飞机紧急起飞条件下,该方案会受到限制;即使事先已准确标定了甲板停机位,但船体在航行过程中因存在缓慢变形,且舰载机停机方位不确定,故仍然无法得到准确的空间定位信息。为此,需提出一种舰载机空间定位方案,使舰载机实时、精确获得停机位的时空基准信息[8-9]。
视觉测量[10-12]是一种非接触目标空间定位手段,具有精度高、速度快、自动化程度高的特点,可以提高舰载机的空间定位精度。通过在不同位置获取同一物体的两幅及以上的数字图像,经特征提取、图像匹配、交会解算等处理后,可以得到待测目标精确的空间三维坐标。视觉测量技术不仅能用于考古、建筑等民用领域,也可应用于大型结构变形测量、无人机自主着舰引导、靶场图像目标检测跟踪与定姿等工业和军事领域。
为此,本文拟提出一种基于视觉测量的舰载机空间定位方案。首先,介绍视觉测量系统外方位参数标定方法,以及机身合作标识同机体坐标系相对位姿标定方法;然后,基于前方交会测量和位姿传递测量理论,获得机身合作标识空间位置及机载惯导与视觉测量系统的相对位置姿态关系;最后,通过开展实物实验及仿真实验,验证基于视觉测量的空间定位结果及位姿传递效果,证明视觉测量方案应用于舰载机空间定位的可行性,以使舰载机获得同母舰的相对位置姿态信息,即杆臂参数信息。
1 基于视觉测量的舰载机空间定位原理
通过视觉测量系统,可以获得视场内多架舰载机的空间位置。该系统由视觉测量相机和数据处理计算机组成。系统配置2 部测量相机以进行双目交会测量,其视场覆盖范围与单目相机相比要大,且不需要空间基准尺等辅助标识。视觉测量相机与舰岛固连安装,其内部参数应预先标定。如图1 所示,首先,预先标定视觉测量系统安装位置及机身合作标识与机载惯导的相对位置关系;然后,2 部视觉测量相机同步采集,使机身合作标识在视觉测量系统中清晰成像,视觉测量系统对每帧图像的合作标识进行图像定位;最后,根据标识的成像位置及视觉测量系统安装参数,基于双目视觉交会测量理论,得到机身合作标识在视觉测量坐标系的空间位置,进而获得机体坐标系同视觉测量坐标系相对位置的姿态关系。基于传递测量理论,同时还可获得机载惯导杆臂参数。
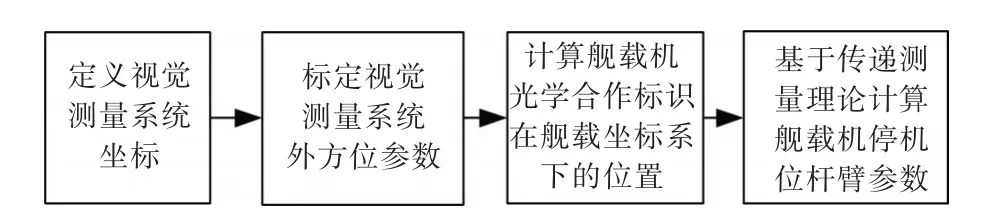
图1 基于视觉测量的舰载机空间定位原理Fig.1 Spatial positioning of aircraft based on vision measurement
2 视觉测量坐标系统定义
为确定舰载机合作标识空间位置,需明确各坐标系统的定义。如图2 所示,导航坐标系N-XYZ取当地地理坐标系,即东北天坐标系;舰载坐标系MINS-XYZ的坐标原点位于舰船的惯导中心,其中X,Y 轴分别指向船体的右舷和船艏,X,Y,Z 轴相互垂直且符合右手定则;理想状态下,机体坐标系S-XYZ与机载惯导坐标系SINS-XYZ相互重合,坐标原点位于机载惯导中心,X,Y,Z轴相互垂直并符合右手定则,分别指向舰载机的右侧、机首及天向。

图2 视觉测量坐标系定义Fig.2 Definition of visual measurement coordinate system
建立视觉测量物坐标系,同舰载坐标系MINS-XYZ保持一致。分别建立像空间坐标系Ci-XYZ、图像坐标系Oi-xy及像素坐标系Ii-uv,其中i为视觉测量相机编号,i=1,2,…,n。
3 视觉测量系统外方位参数标定方法
3.1 外方位参数标定流程
为使舰载机及光学合作标识在相机中清晰成像,应将相机部署于舰船某高于舰载机的平台上,使舰载机目标与视觉测量相机之间可以通视。为降低相机镜头畸变对精密测量的影响,每部视觉测量相机都应在室内环境下进行标定,获取相机内的方位参数,即等效焦距、主点位置、像差系数、光心位置等,用于对相机采集到的信息进行校正。本方案使用的是已经标定的相机,适于担任对远景物体的摄影测量任务。

图3 视觉测量系统外方位参数标定方法Fig.3 Calibration of extrinsic parameters for visual measurement system
基于后方交会原理,可计算各测量相机的外方位参数,即安装位置和主光轴方向,如图3 所示(图中,P1~P4为甲板面固定标识点)。首先,在甲板变形较小的位置选取甲板面固定参考物作为合作标识(其位置在舰载坐标系下已精确标定),用自准直经纬仪瞄准上述合作标识,获取自准直经纬仪与舰载坐标系的关系;然后,在视觉测量相机可拍摄的位置放置可移动测量装备标定工装,配直角反射棱镜,使用自准直经纬仪对准该直角反射棱镜,从而将标定工装引入舰载坐标系,工装上的直角反射棱镜、易于被相机识别的标识点间的位置应预先精确标定,以将标识点引入舰载坐标系;最后,使用已标定的视觉测量相机拍摄特殊工装,基于后方交会原理,获取视觉测量装置的外部参数。
3.2 外方位参数计算方法
标定工装上应至少具备3 个已精确标定的标识点。结合工装的空间位置与工装上直角反射棱镜和标识点间的位置关系,可获取标识点Pi(i=1,2,3)在舰载坐标系MINS-XYZ的位置,即(X1,Y1,Z1) ,(X2,Y2,Z2),(X3,Y3,Z3)。若标识点在像空间坐标系下的空间位置为(x1i,y1i,f1),则各标识点在舰载坐标系和像空间坐标系下的位置关系如式(1)所示:
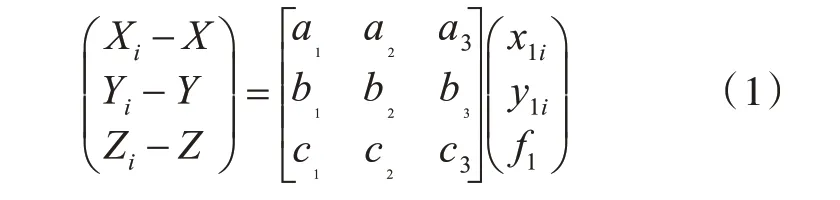
式中:(X,Y,Z)为测量相机成像中心在舰载坐标系MINS-XYZ的精确位置;f1为相机1(C1)的焦距;i为固定标识点角标,i=1,2,3;
a1=cosφcosκ-sinφsinκsinω
a2=-cosφsinκ-sinφcosκsinω
a3=-sinφcosω
b1=cosωsinκ
b2=cosκcosω
b3=-sinω
c1=sinφcosκ+cosφsinκsinω
c2=-sinφsinκ+cosφcosκsinω
c3= -cosφcosω
其中,(φ,ω,κ)为测量相机的主光轴方向。
相机1 中,各标识点P1,P2,P3在像空间坐标系中的位置p1,p2,p3满足共线条件方程,如式(2)所示。将上述共线条件方程联立,可以计算出相机1 的外方位参数,即
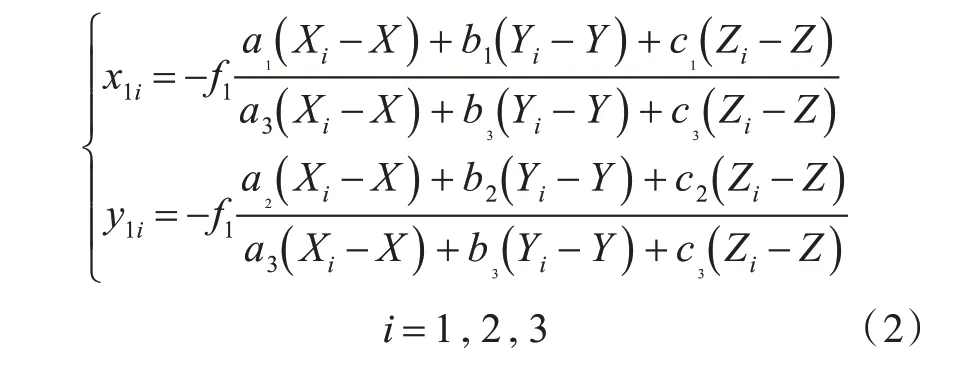
式中:(x11,y11,-f1),(x12,y12,-f1),(x13,y13,-f1)为 像 空 间 点p1,p2,p3的 位 置;(X1,Y1,Z1) ,(X2,Y2,Z2) ,(X3,Y3,Z3) 为标识点P1,P2,P3在舰载坐标系MINS-XYZ下的位置。通过最小二乘平差方法对式(2)进行求解,可以得到视觉测量相机的外方位参数,以及空间坐标系与舰载坐标系相对位置的姿态关系MINSTC,MINSRC(其中T为位移,R为旋转)。
4 舰载机空间定位方法
4.1 机身合作标识空间定位方法

图4 舰载机目标空间定位方法Fig.4 Spatial positioning for aircraft
获得视觉测量系统、舰载坐标系下相对位置的姿态关系后,如图4 所示,通过前方交会方法,可计算舰载机机身光学合作标识在舰载坐标系下的位置。首先,对视觉测量相机采集的图像序列进行图像预处理、图像二值化、圆形特征提取以及目标中心定位等处理,提取舰载机机身合作标识在图像中的精确位置;然后,通过在至少2 部相机采集的图像中提取标识点,进行同名点匹配,结合各相机外方位参数,基于共线条件方程,计算出合作标识的空间位置,如式(3)所示:

式中:(xij,yij)为像点坐标,其中下标i指第i部相机获取的图像,j指每幅图像中各标识点编号;(X i,Y i,Z i),(aij,bij,cij)分别为各测量相机的安装位置与方向余弦;fi为第i部相机的焦距。
通过双目相机,可获得合作标识点的空间位置(X,Y,Z),为提高标识点的解算精度,可提高观测方程数量,应用最小二乘平差方法计算。
4.2 主/子惯导坐标系相对位置姿态关系
机载惯导安装在舰载机内部,因无法与视觉测量系统间进行通视,故不能通过视觉测量直接获得主/子惯导坐标系相对位置的姿态关系。由于机载惯导坐标系与机体坐标系相对位置的姿态关系固定,机身部分固有标识在机体坐标系下的位置固定,因此,可通过视觉测量系统采集图像,提取舰载机机身固有合作标识(至少3 个),获得视觉测量系统、机体坐标系间相对位置的姿态关系。具体计算方法如下所示。
由于舰载机制造与机载惯导装配间存在误差,因此,设机载惯导坐标系与机体坐标系间的相对位置和姿态关系分别为STSINS≈[0 ,0,0]T,SRSINS≈I。
使用专用工装,首先贴紧机载惯导方位基准面,通过直角反射棱镜引出机体方位基准面,然后再使用自准直经纬仪分别瞄准机身各合作标识及专用工装直角反射棱镜,获得合作标识在机体坐标系下的坐标SP1,SP2和SP3。
视觉测量系统启动后,机身合作标识在测量系统坐标系C 下的坐标为CP1,CP2,CP3,获得机体坐标系同视觉测量系统坐标系的转换关系如式(4)所示:

式中,CRS,CTS为测量系统与机体坐标系间的相对位置姿态关系。
如图5 所示(图中RM和RS为主、子惯导相对于地理坐标系的空间位置),若视觉测量坐标系与舰载坐标系间相对位置的姿态关系为MINSRC和MINSTC,根据传递测量理论,机载惯导坐标系中任一点SINSP0在舰载坐标系下的空间位置MINSP,以及舰载局部基准坐标系和机载惯导坐标系的相对位置及姿态关系MINSTSINS,MINSRSINS如式(5)所示:
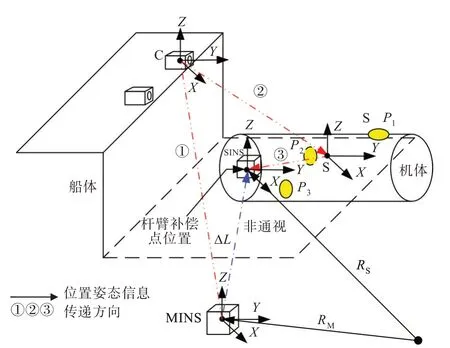
图5 坐标系转换示意图Fig.5 Schematic of coordinate systems transformation
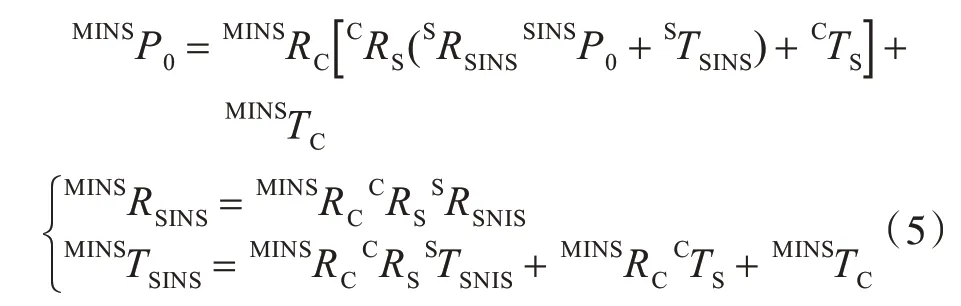
式中:MINSTSINS为主/子惯导坐标系的相对位置关系;MINSRSINS为主/子惯导坐标系的相对姿态关系。
5 实验验证
5.1 视觉测量目标空间定位实验
通过开展基于视觉测量的目标精确相对定位实验,验证双目视觉测量系统的定位精度。实验系统由全站仪、双目视觉测量系统、合作标识及解算计算机构成。如图6 所示,实验场里有高25 m 且顶部平坦的建筑物,适于布置相机等实验设备;另还有开阔的空地,面积大于100 m×100 m,可布置足够数量的光学合作标识;建筑物顶部架设的光学相机与空地上布置的光学合作标识间无障碍物遮挡。

图6 视觉测量实验场地俯视图Fig.6 Top view of visual measurement experiment
实验步骤如下:
第1 步:在场地内预先部署光学合作标识,合作标识间的距离为10 m,以全站仪为基准,使用全站仪预先标定场地内各合作标识的空间坐标。
第2 步,将内参数已知的双目视觉测量相机放置于25 m 高的平台,然后如表1(表中,F 为相机焦距;K1,K2,K3为径向畸变;P1,P2为切向畸变)所示,利用部分合作标识空间位置的真值,以及基于后方交会原理,获得如表2(实验以C2成像中心位置作为坐标系原点,其中X,Y,Z 为空间位置,RX,RY,RZ为C1,C2坐标系间的旋转关系)所示的双目视觉系统外方位参数。
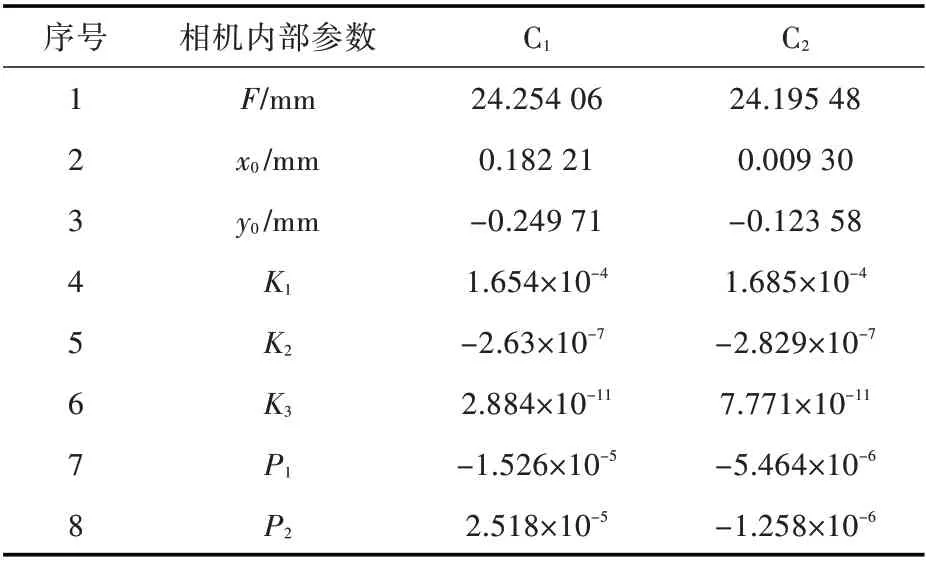
表1 测量相机内方位参数Table 1 Interior parameters of cameras

表2 测量相机外方位参数Table 2 Extrinsic parameters of cameras
第3 步:使双目视觉系统的基线长度为15 m,实时拍摄各合作标识,然后基于前方交会原理,解算光学合作标识的空间位置。
第4 步:将合作标识空间位置的真值与测量值进行比较,获得双目视觉系统测量的平均精度。

经过数据处理,获得的视觉测量平均定位精度如表3 所示。表3 的数据表明,视觉测量系统对100 m 内目标空间平均定位优于30 cm,水平方向平均定位精度优于10 cm。
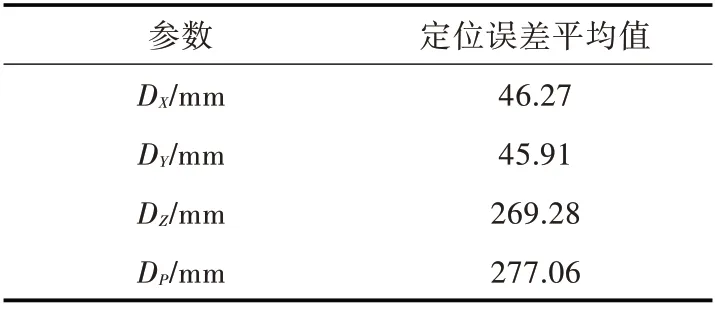
表3 视觉测量系统定位精度Table 3 Positioning accuracy of visual measurement system
5.2 杆臂参数计算仿真实验
为了验证杆臂参数计算方法的可行性,如图7所示,应用AutoCAD 建模软件开发了包含主惯导、视觉测量系统、被测目标模型、子惯导空间位置的空间仿真模型,通过在坐标系转换时施加相对姿态、相对位置误差,验证了非通视环境下基于传递测量的机载惯导杆臂参数测量方案的可行性。
设视觉测量系统左相机的光心坐标为(0 m,0 m,0 m),主惯导中心坐标为(-2.5 m,-2.5 m,-52.5 m),机体、子惯导中心坐标为(-22.5 m,37.5 m,-17.5 m),则主/子惯导杆臂参数的真值为[-20 m,40 m,35 m]。

图7 杆臂测量精度实验示意图Fig.7 Experiment of lever arm measurement accuracy
表4 所示为各坐标系间相对位置、姿态关系的真值R0,T0,以及叠加误差的相对姿态位置测量值R,T。可得非通视条件下基于传递测量的机载惯导杆臂测量值为[-20.425 m,40.199 m,35.876 m],杆臂参数各向测量误差优于1 m,水平方向定位误差优于0.5 m。

表4 传递测量实验参数Table 4 Experimental parameters of relay measurement
6 结 语
本文提出了一种基于视觉测量的舰载机目标空间定位方案,可为舰载机提供高精度的杆臂参数,便于舰载机利用母舰的空间位置信息精确获知其空间位置。通过进行视觉测量实验,获得了中、远距离内的多目标空间定位结果,即空间平均定位优于30 cm,水平方向平均定位精度优于10 cm,证明了视觉测量方法应用于舰载机空间相对定位的有效性。
与此同时,视觉测量方法还可对视场内的多架舰载机同时成像,且无需人工操作,从而适应了未来舰载航空保障智能化、自动化保障的需要;此外,舰载机快速获得其空间位置信息有望对舰载机出动率的提升产生积极影响。
由于雨、雪、雾等天气会对合作标识成像效果产生干扰,在合作标识图像识别与中心定位时,会引入误差,影响其空间定位精度,因此,本文方案只适用于晴天、阴天等合作标识可清晰成像的环境。后续,将基于近红外成像相机开展夜间环境视觉测量精度实验,提高视觉测量手段获得高精度杆臂参数的工程适用性。
